Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству для управления полетом воздушного судна, содержащему орган управления полетом, выполненный с возможностью привода в действие пилотом, механизм установки и направления поворота органа управления полетом вокруг, по меньшей мере, одной оси поворота, именно, в соответствии с кинематической связью поворота вокруг центральной точки, определяемой двумя осями шарнирного поворота, по меньшей мере, по существу, перпендикулярными друг другу, или шаровым шарниром, относительно неподвижной рамы воздушного судна.
В данном описании термин «управление полетом» и его производные подразумевает, если не указано иное, ведение воздушного судна человеком-пилотом, управляющим, по меньшей мере, одним органом управления полетом, таким как рукоятка, рычаг, рычаг ножного управления полетом, педаль. Термины «позади, за» и «спереди, перед» используются по направлению кинематической цепи, идущей от органа управления полетом к органу ведения (руль, двигатель или двигатели) воздушного судна, управляемому органом управления полетом. Термин «тангенциальный» и его производные означают по отношению к оси поворота плоскость, перпендикулярную радиальному направлению к оси поворота, или направление, перпендикулярное радиальному направлению к оси поворота. Выражение «кинематическая поворотная связь с центральной точкой» подразумевает любую связь, допускающую повороты вокруг неподвижной точки, и соответственно, охватывает шаровые или сферические связи, связи, по меньшей мере, по существу, с перпендикулярными пересекающимися осями, связи посредством карданов и другие. Выражение «по меньшей мере, по существу» обычным образом указывает, что конструктивная характеристика, такая как величина, или функциональная характеристика, не должна восприниматься как резкий разрыв непрерывной характеристики, который не имел бы физического смысла. Выражение означает то, что характеристика охватывает не только данную конструкцию или данную функцию, но также эквивалентные модификации данной конструкции или данной функции в рассматриваемом техническом контексте, эффект того же свойства или той же степени.
Уровень техники
Традиционным образом устройство для управления полетом воздушного судна содержит, по меньшей мере, один орган управления полетом, связанный, по меньшей мере, частично посредством кинематической цепи, по меньшей мере, с одним органом ведения воздушного судна, именно, с одним рулем, двигателем или другим компонентом, и, по меньшей мере, один механически приводимый исполнительный орган, называемый параллельным исполнительным органом, который является ведущим органом, подсоединенным параллельно в кинематической цепи таким образом, чтобы обеспечивать возможность автоматического управления полетом и/или имитировать специфическую динамическую характеристику органа управления полетом для создания возвратного хода к нейтральному положению и соответствующих ощущений (а именно, ощущения мышечного усилия) и обеспечивает возможность или облегчает управление полетом пилотом-человеком.
Традиционные устройства управления полетом, называемые механическими устройствами управления, содержат кинематическую цепь, которая механически объединяет в одно целое органы управления полетом с органами ведения. В типичном случае кинематическая цепь содержит систему тяг и рычагов с тягами и/или шарнирными сочленениями и/или ползунами, которые позволяют преобразовывать команды перемещений и механических усилий (при необходимости с усилением) между органом управления полетом и каждым органом ведения. Такие устройства управления полетом с полностью механическим управлением широко используются во многих воздушных судах (самолетах малой авиации, вертолетах).
Для управления полетом некоторых воздушных судов были разработаны устройства управления полетом, называемые электрическими, в которых органы ведения связаны с органами управления полетом не полностью механически посредством кинематической цепи. Эти устройства управления полетом с электрическим управлением содержат частичную кинематическую цепь, которая имеет, по меньшей мере, один механизм установки и направления поворота каждого органа управления полетом, установленного и направляемого относительно рамы, жестко соединенной с воздушным судном, и снабжены комплектом датчиков положения и/или усилия, связанных с вычислительными устройствами команд управления полетом, генерирующими сигналы команд для сервокоманд на электрическом входе, приводящих в действие один или несколько органов ведения.
В частном случае, когда устройство для управления полетом воздушного судна выполнено в виде мини-рукоятки, орган управления полетом установлен и направляется с помощью шарнирных связей при повороте вокруг двух осей, по меньшей мере, по существу, перпендикулярных друг другу и пересекающихся (с образованием связи для поворота вокруг центральной точки), что позволяет передавать движения продольного наклона, то есть тангажа, и бокового крена.
Такое устройство для управления полетом в целом содержит, по меньшей мере, один датчик усилий, измеряющий, по меньшей мере, одну составляющую усилий в устройстве управления полетом путем деформации, по меньшей мере, одного деформируемого чувствительного элемента датчика усилий. Такой датчик усилий позволяет, в частности, выполнять тренировочные испытания и поставляет полезные сигналы для выработки автоматизма, связанного с такими устройствами для управления полетом, например, для подсоединения нескольких органов управления полетом воздушного судна и/или для подачи сигналов на электронное устройство контроля функционирования устройства для управления полетом и/или для автоматических действий пилота и/или для управления моторами, связанными со степенями свободы органа управления полетом таким образом, чтобы реализовать переменное ощущение возвратной силы, имитируемой электрическими средствами.
При этом устройства для управления полетом воздушного судна для целей их сертификации должны выдерживать максимальные сертификационные усилия, величина которых значительно превосходит номинальную рабочую величину усилий при реальном управлении полетом воздушного судна. В типичном случае величина максимальных сертификационных усилий превышает номинальную рабочую величину в десять раз. Эти сертификационные усилия прилагают, когда орган управления полетом помещен в упорное положение относительно рамы в одну или другую сторону.
В то же время, для того, чтобы измерение усилий было как можно более точным, нужно, чтобы датчик усилий был оптимизирован на рабочие величины усилий, прилагаемых в устройстве управления полетом, а не обязательно на величины сертификационных усилий. Таким образом, нужно иметь возможность выбора такого датчика усилий, чтобы он мог иметь диапазон измерений, охватывающий величину максимального рабочего усилия с определенным коэффициентом запаса. На практике выбирают датчик усилий таким, чтобы он мог выдерживать от 150% до 200% максимального рабочего усилия. В этих условиях следует избегать того, чтобы датчик усилий непосредственно воспринимал величину сертификационных усилий, которые могут вызывать выход из строя датчика усилий вплоть до его разрушения.
В некоторых известных устройствах для управления полетом (см., например, патентный документ JP №10059293) датчик усилий расположен в кинематической цепи за механизмом установки органа управления полетом, а упоры, ограничивающие угловое отклонение органа управления полетом, расположены между датчиком усилий и органом управления полетом. В этих устройствах датчик усилий изолирован от усилий реакции, когда орган управления полетом находится в упорном положении. Однако эта архитектура имеет основной недостаток в том, что не измеряются усилия трения, развиваемые в механизме установки и направления органа управления полетом.
В других известных устройствах для управления полетом (см., например, патентный документ US №8050780) датчик усилий расположен перед механизмом установки органа управления полетом. В этих известных устройствах приложение сертификационных усилий требует установки специального дополнительного упора на уровне датчика усилий для предотвращения его выхода из строя. Однако такая установка сложна (а, следовательно, менее надежна), занимает место, увеличивает вес и затраты.
Раскрытие изобретения
Задачей настоящего изобретения является устранение указанных недостатков и создание устройства для управления полетом, которое, с одной стороны, позволяет точно измерять усилия, в том числе с учетом усилий и трения в механизме установки и направления при повороте органа управления полетом, и, с другой стороны, может выдерживать испытательные сертификационные усилия без необходимости добавления дополнительных специальных упоров помимо тех, что строго необходимы для ограничения отклонения органа управления полетом.
Изобретением предусматривается решение этих задач простым образом, с низкими затратами, без загромождения конструктивного пространства и увеличения веса устройства для управления полетом.
Для этих целей в соответствии с изобретением предложено устройство для управления полетом воздушным судном, содержащее орган управления полетом, предназначенный для привода в действие пилотом; механизм установки и направления поворота органа управления полетом вокруг, по меньшей мере, одной оси поворота относительно рамы; упоры для ограничения угловой амплитуды поворота органа управления полетом относительно рамы; по меньшей мере, один датчик усилий, связанный с органом управления полетом перед механизмом и содержащий, по меньшей мере, один чувствительный элемент, деформируемый в соответствии с типами деформации, соответствующими величине, по меньшей мере, одной составляющей усилия, прилагаемого пилотом к органу управления полетом, отличающееся тем, что упоры расположены таким образом, чтобы взаимодействовать с упорными поверхностями, жестко соединенными с органом управления полетом перед механизмом, причем каждый датчик усилий, упоры и упорные поверхности расположены по отношению друг к другу таким образом, что каждый контакт упорной поверхности с упором создает реакцию упора, направление которой относительно каждого чувствительного деформируемого элемента каждого датчика усилий таково, что эта реакция упора воздействует на чувствительный деформируемый элемент, по меньшей мере, по существу, вне его типов деформации.
Таким образом, каждый чувствительный деформируемый элемент каждого датчика, по существу, не подвергается воздействию реакции опоры в пределах типов деформации и не измеряет эту реакцию опоры, что устраняет риск повреждения чувствительного деформируемого элемента. В результате можно выбирать каждый датчик усилий оптимальным образом по отношению к измерению ожидаемых величин рабочих усилий, без риска того, что датчик усилий не выдержит реакций упоров от намного более высоких величин усилий, прилагаемых в ходе сертификации устройства для управления полетом. Этот результат достигается чрезвычайно простым путем, без перегрузки цепи и без необходимости добавления специального упора перегрузки.
В предпочтительном примере выполнения устройство по изобретению отличается также тем, что содержит датчик усилий с деформируемой на изгиб мембраной, в целом плоской в состоянии покоя и проходящей тангенциально по отношению, по меньшей мере, к одной оси поворота органа управления полетом, при этом упоры и упорные поверхности расположены таким образом, что приходят в контакт друг с другом в зонах контакта, расположенных в плоскости, включающей плоскость мембраны, при этом упоры и упорные поверхности ориентированы таким образом, что создают реакции упоров, ориентированные в плоскости мембраны, то есть тангенциально по отношению к оси поворота. Таким образом, деформируемая на изгиб мембрана подвергается воздействию реакции упора на продольное сжатие/сдвиг, то есть типы деформации, для которых она имеет достаточно высокий момент инерции, чтобы выдерживать без повреждения очень высокие реакции упора.
В частности, выгодным образом согласно изобретению для каждой оси поворота каждый упор и/или соответствующая упорная поверхность органа управления полетом имеет поверхность, проходящую в плоскости, параллельной оси поворота. При этом реакция упора ориентирована тангенциально относительно оси поворота (то есть перпендикулярно радиальному направлению к оси поворота) и, таким образом, в плоскости мембраны. В предпочтительном примере выполнения каждый упор и соответствующая упорная поверхность являются плоскими поверхностями, приходящими в контакт друг с другом, когда орган управления полетом перемещается на максимальный угол, при этом две плоские поверхности находятся в плоскости, параллельной радиальной плоскости оси поворота и включающей ось поворота (радиальная осевая плоскость).
Далее, выгодным образом согласно изобретению каждая упорная поверхность является частью периферийной стенки датчика усилий. В варианте решения ничто не мешает предусмотреть, что упорная поверхность образована специальной деталью, отдельной от датчика усилий и соединенной с органом управления полетом на уровне датчика усилий.
Выгодным образом согласно изобретению механизм выполнен таким образом, что определяет поворотную связь с центральной точкой, а именно выбранную между поворотной связью шарового шарнира и поворотной связью с поворотом вокруг двух осей, по меньшей мере, по существу, перпендикулярных и, по меньшей мере, по существу, пересекающихся, - в частности, строго перпендикулярных и пересекающихся. Изобретение имеет особые преимущества применительно к устройству для управления полетом, в котором этот механизм выполнен таким образом, что определяет поворотную связь с поворотом вокруг двух осей поворота, по меньшей мере, по существу, перпендикулярных по отношению к раме.
Предпочтительно устройство для управления полетом по изобретению содержит датчик усилий, выполненный с возможностью измерения усилий при различных поворотных движениях органа управления полетом, при этом датчик усилий встроен между органом управления полетом и механизмом. Датчик усилий особенно пригоден для измерения усилий органа управления полетом при повороте вокруг двух осей поворота, то есть при тангаже и боковом крене, когда механизм имеет две оси поворота, - ось тангажа и ось бокового крена.
Изобретение особенно применимо и дает преимущества в органе управления полетом, образованном мини-рукояткой воздушного судна. Однако оно применимо также к другим органам управления полетом, в которых имеются те же проблемы.
Изобретение также предлагает воздушное судно, содержащее, по меньшей мере, один орган управления полетом, связанный, по меньшей мере, с одним органом ведения, - а именно, по меньшей мере, с одним рулем или, по меньшей мере, с одним мотором воздушного судна, для управления его функционированием, а именно положением и перемещениями, отличающееся тем, что содержит, по меньшей мере, одно устройство управления полетом по изобретению для управления, по меньшей мере, одним органом ведения воздушного судна.
Изобретение относится также к устройству для управления полетом и к воздушному судну, которые в своей комбинации отличаются всеми упомянутыми выше или указанными ниже характеристиками или их частью.
Краткое описание графических материалов
Другие задачи, характеристики и преимущества изобретения будут ясны из описания предпочтительного примера выполнения, не имеющего ограничительного характера, со ссылками на прилагаемые чертежи. На чертежах:
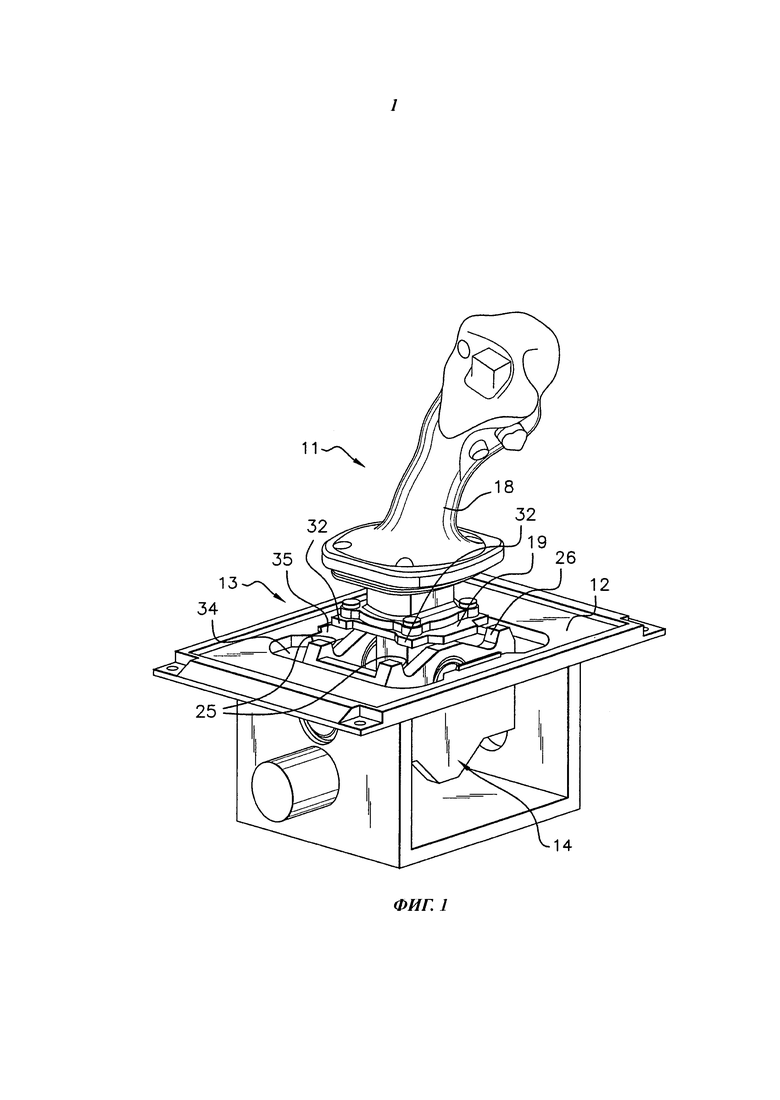
фиг.1 схематично изображает в перспективе устройство управления полетом по изобретению с мини-рукояткой,
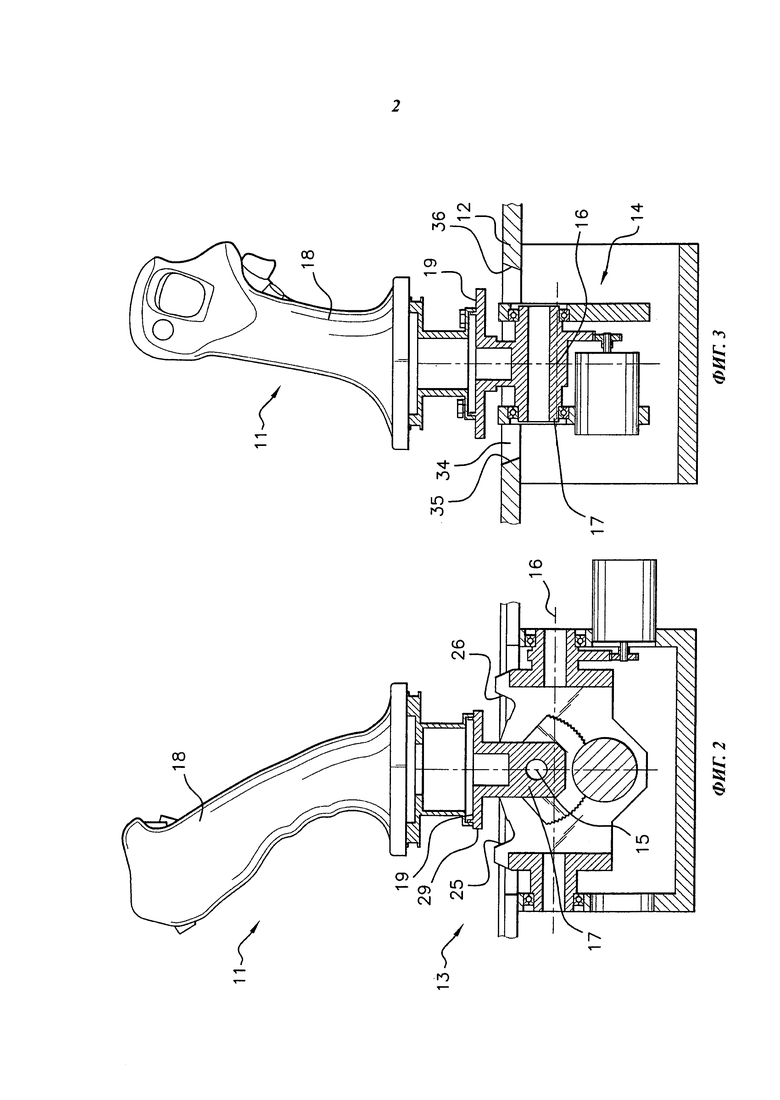
фиг.2 схематично изображает устройство по фиг.1 на виде слева с частичным вертикальным разрезом по оси поперечного наклона,
фиг.3 схематично изображает устройство по фиг.1 на виде сзади с частичным вертикальным разрезом по оси продольного наклона,
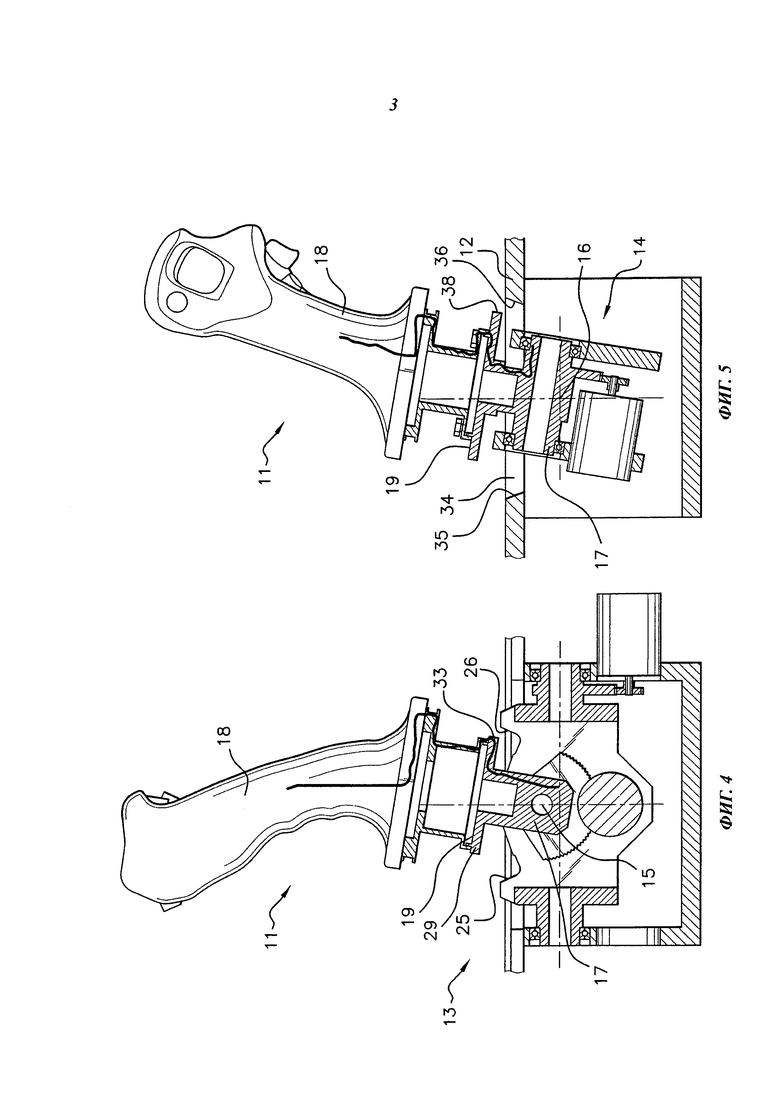
фиг.4 изображает на виде, подобном виду по фиг.2, орган управления полетом в промежуточном положении на пути к заднему упору,
фиг.5 изображает на виде, подобном виду по фиг.3, орган управления полетом в промежуточном положении на пути к правому упору,
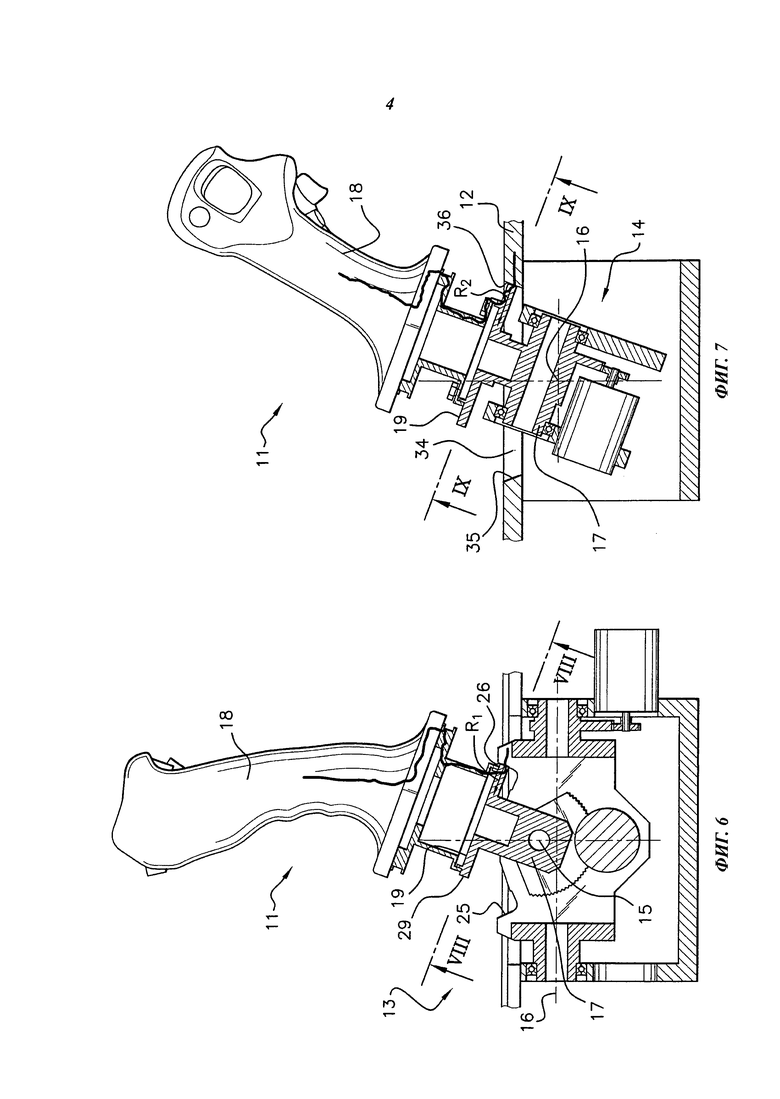
фиг.6 изображает на виде, подобном виду по фиг.2, орган управления полетом в положении контакта с задним упором,
фиг.7 изображает на виде, подобном виду по фиг.3, орган управления полетом в положении контакта с правым упором,
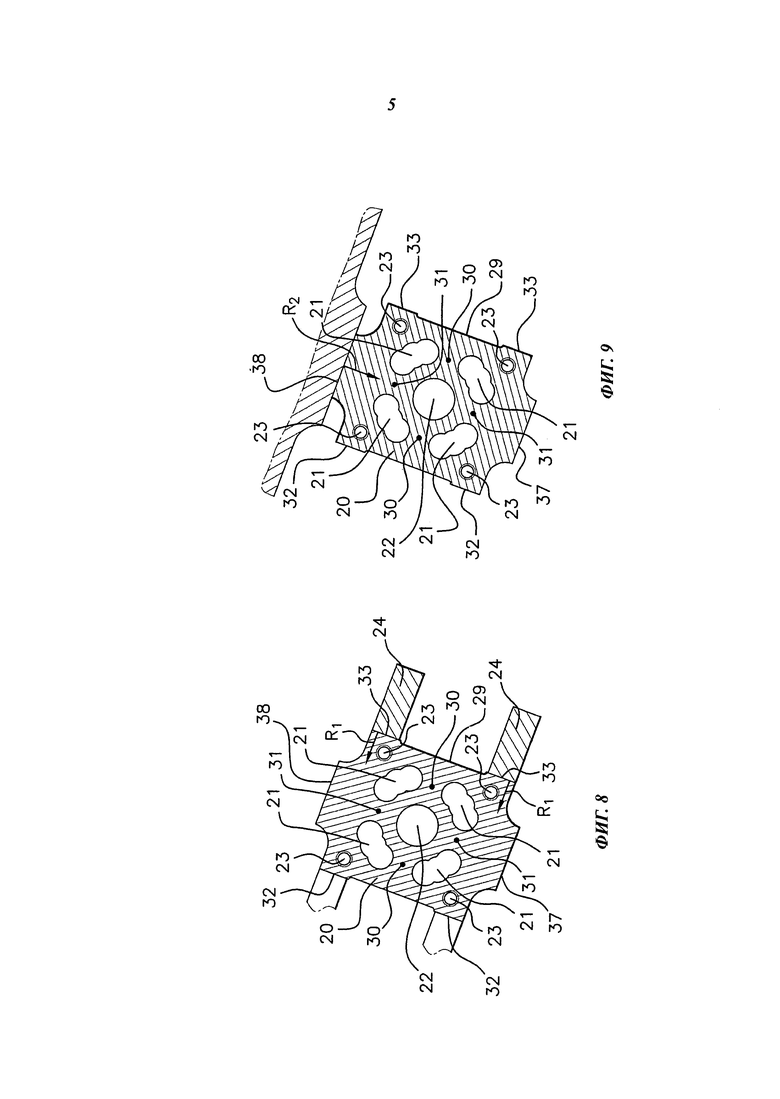
фиг.8 изображает вид в разрезе по линии VIII-VIII на фиг.6,
фиг.9 изображает вид в разрезе по линии IX-IX на фиг.7.
Осуществление изобретения
Показанное на чертежах устройство управления полетом содержит орган 11 управления полетом, в данном примере выполненный в виде мини-рукоятки управления воздушным судном, которая установлена и направляется при шарнирном повороте относительно рамы 12, жестко укрепленной относительно кабины воздушного судна, с помощью механизма 13, называемого карданом. Механизм 13 определяет поворотную связь мини-рукоятки 11 с центральной точкой и содержит люльку 14, ось 15 шарнирного поворота нижнего конца 17 мини-рукоятки 11 относительно люльки 14 в направлении тангажа и ось 16 шарнирного поворота люльки 14 относительно рамы 12 в направлении бокового крена. Оси 15, 16 шарнирного поворота, по меньшей мере, по существу, перпендикулярны друг другу, - предпочтительно строго перпендикулярны - и, по меньшей мере, по существу, пересекаются, то есть либо точно пересекаются, либо слегка смещены относительно друг друга, но на достаточно малое расстояние, чтобы оно, по существу, не изменяло поведения органа управления полетом при повороте, так что механизм определяет идеальную или не идеальную поворотную связь с центральной точкой. Такой механизм 13 установки и направления поворота мини-рукоятки 11 управления воздушным судном сам по себе хорошо известен и здесь подробно не описывается.
Мини-рукоятка 11 содержит верхнюю часть 18, которая образует ручку, предназначенную для выполнения пилотом операций управления полетом, и нижний конец 17, соединенный с механизмом 13. Между верхней частью 18 и нижним концом 17 мини-рукоятки 11 устройство управления полетом содержит датчик 19 усилий в виде измерителя механических напряжений. В показанном примере выполнения он образован плоской мембраной 20, в целом параллельной двум осям поворота, - оси 15 поворота в направлении тангажа и оси 16 поворота в направлении бокового крена, - и имеющей четыре проема 21, так что мембрана 20 деформируется посредством изгиба в соответствии с величиной момента, передаваемого пилотом на ручку 18 в направлении тангажа или бокового крена. Такой датчик 19 усилий в целом в виде плоской мембраны может быть выполнен в других вариантах, например, в виде мембраны, снабженной круглой кольцевой канавкой между полостями по отношению к ее нижней поверхности.
Мембрана 20 имеет центральный проем 22, который позволяет жестко укреплять ее на нижнем конце мини-рукоятки 11. Проемы 21 мембраны 20 равномерно распределены вокруг центрального проема 22, так что мембрана 20 образует четыре деформируемых на изгиб радиальных луча 30, 31, при этом два луча 30 перпендикулярны оси 15 поворота тангажа, по одному с каждой стороны от центрального проема 22, и два луча 31 перпендикулярны оси 16 поворота бокового крена, по одному с каждой стороны от центрального проема 22.
На периферии мембраны 20 четыре отверстия 23 позволяют прикрепить ручку 18 к мембране 20. Таким образом, мембрана 20 жестко прикреплена к мини-рукоятке 11 и проходит поперечно ей, то есть тангенциально к двум осям 15, 16 шарнирного поворота тангажа и бокового крена. Мембрана 20 имеет периферийную закраину 29, проходящую перпендикулярно основному направлению мембраны.
Каждый радиальный луч 30, 31 снабжен электрическим сопротивлением, образующим измеритель механических напряжений изгиба. Кроме того, мембрана 20 связана с электрической цепью (не показана), предназначенной для измерения изменений электрического сопротивления каждого луча 30, 31 в зависимости от его изгиба. В качестве примера электрические сопротивления лучей 30, 31 соединены по схеме моста Уитстона. Такой датчик с четырьмя измерителями позволяет получать более высокую точность, чем датчик с одним измерителем. На два противоположных узла моста Уитстона подают непрерывное напряжение и измеряют напряжение на двух других противоположных узлах. Поскольку напряжение между двумя последними узлами низкое, электрическая цепь состоит, по существу, из усилителя.
Согласно другому возможному варианту датчик 19 усилий может быть выполнен в виде магнитострикционного датчика. Для этого лучи 30, 31 выполнены из предварительно намагниченного ферромагнитного материала (такого как сталь). Такой ферромагнитный материал проявляет обратный магнитострикционный эффект, называемый магнитомеханическим эффектом, который характеризуется изменением магнитной чувствительности при наличии механических напряжений в материале. При дополнении датчиками магнитного поля (датчиками, работающими по принципу эффекта Холла или другими) непосредственно измеряют напряжение, а следовательно и усилие.
Люлька 14 имеет две поперечные щеки 24, между которыми нижний конец 17 мини-рукоятки 11 шарнирно установлен на оси 15 поворота тангажа. Две поперечные щеки 24 параллельны друг другу и имеют одинаковую форму и размеры. Спереди и сзади они определяют соответственно передние упоры 25 и задние упоры 26, которые ограничивают амплитуду углового отклонения мини-рукоятки 11 при повороте вокруг оси 15 в направлении тангажа.
Передний упор 25 на каждой щеке 24 образован уступом, который выступает вверх от щеки 24 для образования плоской части стенки, проходящей в плоскости, параллельной оси 15 поворота тангажа и обращенной назад с небольшим наклоном вверх, чтобы иметь возможность принимать часть периферийной закраины 29 мембраны 20 датчика 19 усилий, на которой имеется передняя упорная поверхность 32 для контакта с передним упором 25. При этом периферийная закраина 29 мембраны 20 содержит две обращенные вперед упорные поверхности 32, предназначенные для входа в контакт с двумя передними упорами 25 на двух щеках 24 люльки 14.
Задний упор 26 каждой щеки 24 также образован уступом, который выступает вверх от щеки 24 для образования плоской части стенки, проходящей в плоскости, параллельной оси 15 поворота тангажа и обращенной вперед с небольшим наклоном вверх, чтобы иметь возможность принимать часть периферийной закраины 29 мембраны 20 датчика 19 усилий, на которой имеется задняя упорная поверхность 33 для контакта с задним упором 26. При этом периферийная закраина 29 мембраны 20 содержит две обращенные назад упорные поверхности 33, предназначенные для входа в контакт с двумя задними упорами 26 на двух щеках 24 люльки 14.
Следует отметить, что образованные люлькой 14 упоры 25, 26 ограничивают перемещение тангажа мини-рукоятки 11 за счет того, что сама люлька 14 жестко зафиксирована на раме 12 от шарнирного поворота тангажа и может поворачиваться относительно рамы 12 только вокруг оси 16 поворота в направлении бокового крена.
Далее, рама 12 выполнена с проемом 34, через который проходит нижний конец 17 мини-рукоятки 11, а люлька 14 шарнирно прикреплена к раме 12 под проемом 34. Проем 34 определяет слева и справа от мини-рукоятки 11 соответственно левый упор 35 и правый упор 36, которые ограничивают амплитуду углового отклонения мини-рукоятки 11 в направлении бокового крена с поворотом вокруг оси 16 поворота бокового крена.
Левый упор 35 образован частью плоской стенки, проходящей в плоскости, параллельной оси 16 поворота бокового крена и обращенной вправо с небольшим наклоном вверх, чтобы иметь возможность принимать часть периферийной закраины 29 мембраны 20 датчика 19 усилий, на которой имеется левая упорная поверхность 37 для контакта с левым упором 35 рамы 12. При этом периферийная закраина 29 мембраны 20 содержит обращенную вправо центральную выступающую часть, определяющую плоскую левую упорную поверхность 37, предназначенную для входа в контакт с левым упором 35 рамы 12.
Правый упор 36 образован частью плоской стенки, проходящей в плоскости, параллельной оси 16 поворота бокового крена и обращенной влево с небольшим наклоном вверх, чтобы иметь возможность принимать часть периферийной закраины 29 мембраны 20 датчика 19 усилий, на которой имеется правая упорная поверхность 38 для контакта с правым упором 36 рамы 12. При этом периферийная закраина 29 мембраны 20 содержит слева центральную выступающую часть, определяющую плоскую правую упорную поверхность 38, предназначенную для входа в контакт с правым упором 36 рамы 12.
Упоры 25, 26, 35, 36 и соответствующие упорные поверхности 32, 33, 37, 38 проходят перпендикулярно основной плоскости мембраны 20, когда мини-рукоятка 11 находится в положении упора. В результате этого, как показано на фиг.4, 6 и 8, зона контакта между задним упором 26 и задней упорной поверхностью 33 расположена на уровне плоскости мембраны 20, и реакция R1 упора тангажа ориентирована в основной плоскости мембраны 20 в тангенциальном направлении относительно оси 15 поворота тангажа. Эта реакция R1 заднего упора тангажа вызывает продольное сжатие/тангенциальное напряжение мембраны 20 вне типа деформации изгиба, так что она не вызывает изгиба лучей мембраны и, по существу, не измеряется датчиком 19 усилий. Путь усилия, схематично показанный на фиг.4 и 6 жирной кривой линией, в промежуточном положении проходит через мембрану 20, чтобы вызывать деформацию изгиба (фиг.4), но уже не проходит через нее в положении заднего упора (фиг.6).
Таким же образом, как показано на фиг.5, 7 и 9, зона контакта между правым упором 36 и правой упорной поверхностью 38 расположена на уровне плоскости мембраны 20, и реакция R2 упора бокового крена ориентирована в основной плоскости мембраны 20 в тангенциальном направлении относительно оси 16 поворота бокового крена. Эта реакция R2 правого упора бокового крена вызывает продольное сжатие/тангенциальное напряжение мембраны 20 вне типа деформации изгиба, так что она не вызывает изгиба лучей мембраны и, по существу, не измеряется датчиком 19 усилий. Путь усилия, схематично показанный на фиг.5 и 7 жирной кривой линией, в промежуточном положении проходит через мембрану 20, чтобы вызывать деформацию изгиба (фиг.5), но уже не проходит через нее в положении правого упора (фиг.7).
То же самое относится к переднему упору и левому упору. Другими словами, для каждого упора органа управления полетом реакция упора имеет незначительную или даже нулевую составляющую по отношению к типу изгиба мембраны 20 датчика 19 усилий. В устройстве по изобретению путь усилия проходит через мембрану 20 для того, чтобы обеспечивать возможность измерения усилий во всех положениях органа управления полетом кроме положения упора, а для каждого положения упора органа управления полетом в одном или другом направлении путь усилия уже не проходит через мембрану 20 и не вызывает ее изгиба.
Воздушное судно по изобретению, оснащенное, по меньшей мере, одним таким устройством управления полетом, может быть сертифицировано без риска повреждения каждого датчика усилий, оно снабжено надежным и точным датчиком усилий в каждом органе управления полетом. При этом можно переводить орган управления полетом в упорное положение со значительно более высоким усилием, чем номинальное рабочее усилие, например, в конце сертификации без риска повреждения датчика 19 усилий.
ПРИМЕР
Изготовлен датчик 19 усилий, такой как представленный на фиг.8 и 9, с мембраной 20 из металлического материала, имеющей длину 82 мм между боковыми упорными плоскостями 37, 38 и ширину 64 мм между передней и задней упорными плоскостями 32, 33. Деформируемая центральная часть, ограниченная проемами 21 вписана в окружность диаметром порядка 54 мм. Толщина мембраны 20 зависит от металлического материала, который может быть выбран из группы, содержащей сталь, сплав титана или сплав алюминия. В случае сплава алюминия мембрана 20 имеет толщину, например, равную 5 мм.
В том случае, когда устройство управления полетом представляет собой показанную на чертежах мини-рукоятку, усилия имеют следующие величины:
По глубине (тангаж):
Эти величины сертификационного усилия могут прилагаться в устройстве управления полетом по изобретению с описанным выше датчиком 19 без повреждения последнего.
При осуществлении изобретения возможны множество вариантов выполнения и другие примеры использования, отличные от показанных на чертежах и описанных выше. В частности, изобретение может использоваться в органах управления полетом других типов и с другими типами датчиков усилий. Ничто не мешает тому, чтобы предусмотреть множество датчиков усилий для одного и того же органа управления полетом. Важно, чтобы реакции упора могли быть ориентированы таким образом, чтобы не вызывать деформации различных датчиков усилий.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОННОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ОРГАНА УПРАВЛЕНИЯ ПОЛЕТОМ ВОЗДУШНОГО СУДНА, УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛЕТОМ ВОЗДУШНОГО СУДНА И ВОЗДУШНОЕ СУДНО С ТАКИМ УСТРОЙСТВОМ УПРАВЛЕНИЯ ПОЛЕТОМ | 2010 |
|
RU2537364C2 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ УСТРОЙСТВА ПИЛОТИРОВАНИЯ ВОЗДУШНОГО СУДНА И УСТРОЙСТВО ПИЛОТИРОВАНИЯ ВОЗДУШНОГО СУДНА | 2014 |
|
RU2671442C2 |
| СПОСОБ И УСТРОЙСТВО ВЗАИМОСВЯЗИ МЕЖДУ ОРГАНАМИ ПИЛОТИРОВАНИЯ, ОРГАН ПИЛОТИРОВАНИЯ И ВОЗДУШНОЕ СУДНО | 2016 |
|
RU2693516C2 |
| РУЧКА УПРАВЛЕНИЯ ДЛЯ ВОЗДУШНОГО СУДНА | 2013 |
|
RU2608549C2 |
| УСТРОЙСТВО ВЗАИМОСВЯЗИ УСИЛИЙ МЕЖДУ ОРГАНАМИ ПИЛОТИРОВАНИЯ, ОРГАН ПИЛОТИРОВАНИЯ И ВОЗДУШНОЕ СУДНО | 2013 |
|
RU2615897C2 |
| МНОГОКАНАЛЬНЫЙ ОРГАН УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2014 |
|
RU2559188C1 |
| ГИБРИДНОЕ ВОЗДУШНОЕ СУДНО | 1996 |
|
RU2160689C2 |
| РУЧКА УПРАВЛЕНИЯ ДЛЯ ВОЗДУШНОГО СУДНА | 2013 |
|
RU2611323C2 |
| ВОЗДУШНОЕ СУДНО И СПОСОБ ЭКСПЛУАТАЦИИ ВОЗДУШНОГО СУДНА | 2000 |
|
RU2250181C2 |
| БОКОВАЯ РУЧКА УПРАВЛЕНИЯ САМОЛЕТОМ | 2014 |
|
RU2571992C1 |
Изобретение относится к управлению полетом. Устройство для управления полетом воздушного судна содержит орган (11) управления полетом, механизм (13) установки и направления поворота органа (11) управления полетом вокруг оси поворота относительно рамы (12), упоры (25, 26, 35, 36) датчики (19) усилий, а также деформируемый чувствительный элемент. Упоры (25, 26, 35) расположены с возможностью взаимодействия с упорными поверхностями (32), жестко соединенными с органом (11) управления полетом перед механизмом (13). Каждый датчик (19) усилий, упоры (25, 26, 35) и упорные поверхности (32) расположены по отношению друг к другу таким образом, что каждый контакт упорной поверхности (32) с упором (25, 26, 35) создает реакцию упора. Изобретение повышает точность измерения усилий, позволяет выдерживать испытательные усилия и устраняет необходимость добавления дополнительных упоров. 3 н. и 5 з.п. ф-лы, 9 ил.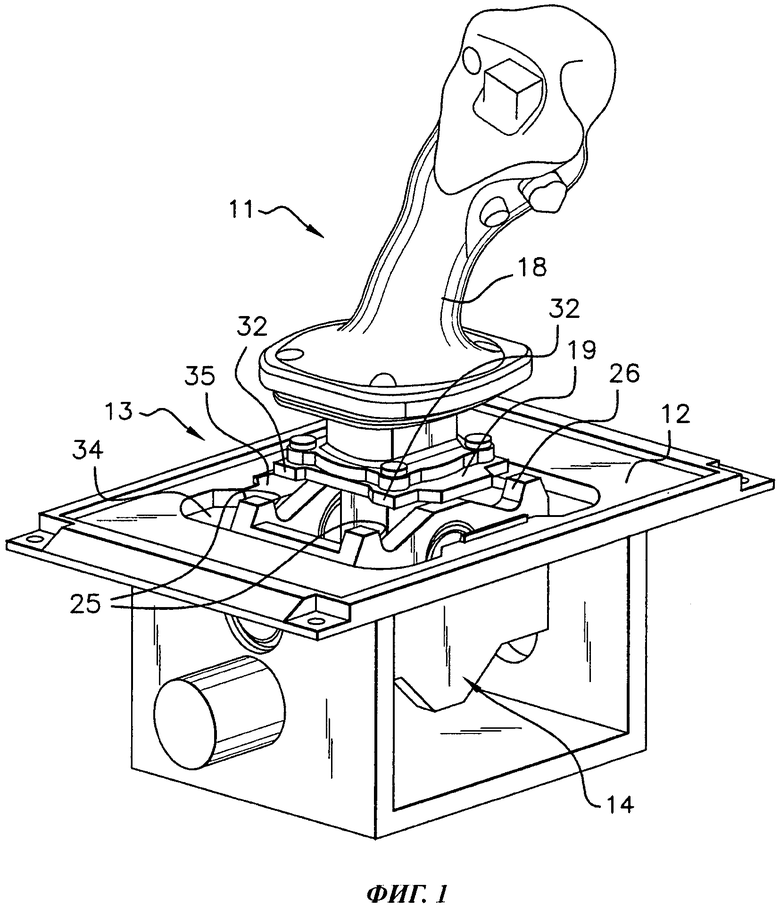
1. Устройство для управления полетом воздушного судна, содержащее орган (11) управления полетом, приводимый в действие пилотом; механизм (13) установки и направления поворота органа (11) управления полетом вокруг по меньшей мере одной оси (15, 16) поворота относительно рамы (12); упоры (25, 26, 35, 36) для ограничения угловой амплитуды поворота органа (11) управления полетом относительно рамы; по меньшей мере один датчик (19) усилий, связанный с органом (11) управления полетом перед механизмом (13) и содержащий по меньшей мере один чувствительный элемент (20), деформируемый в соответствии с типами деформации, соответствующими величине по меньшей мере одной составляющей усилия, прилагаемого пилотом к органу (11) управления полетом, отличающееся тем, что упоры (25, 26, 35, 36) расположены с возможностью взаимодействия с упорными поверхностями (32, 33, 37, 38), жестко соединенными с органом (11) управления полетом перед механизмом (13), причем каждый датчик (19) усилий, упоры (25, 26, 35, 36) и упорные поверхности (32, 33, 37, 38) расположены по отношению друг к другу таким образом, что каждый контакт упорной поверхности (32, 33, 37, 38) с упором (25, 26, 35, 36) создает реакцию (R1, R2) упора, направление которой относительно каждого чувствительного деформируемого элемента (20) каждого датчика (19) усилий таково, что реакция (R1, R2) упора воздействует на чувствительный деформируемый элемент (20), по меньшей мере, по существу, вне указанных типов деформации, причем указанная реакция упора, по меньшей мере, по существу, не способна деформировать указанный деформируемый чувствительный элемент в соответствии с указанными типами деформации и повредить указанный деформируемый чувствительный элемент.
2. Устройство по п. 1, отличающееся тем, что содержит датчик (19) усилий с деформируемой на изгиб мембраной (20), в целом плоской в состоянии покоя и проходящей тангенциально по отношению по меньшей мере к одной оси (15, 16) поворота органа управления полетом, при этом упоры (25, 26, 35, 36) и упорные поверхности (32, 33, 37, 38) расположены таким образом, что приходят в контакт друг с другом в зонах контакта, расположенных в плоскости, включающей плоскость мембраны (20), при этом упоры и упорные поверхности ориентированы таким образом, что создают реакции (R1, R2) упоров, ориентированные в плоскости мембраны (20).
3. Устройство по п. 2, отличающееся тем, что для каждой оси (15, 16) поворота каждый упор (25, 26, 35, 36) и/или соответствующая упорная поверхность (32, 33, 37, 38) органа (11) управления полетом имеет поверхность, проходящую в плоскости, параллельной оси (15, 16) поворота.
4. Устройство по любому из пп. 1-3, отличающееся тем, что каждая упорная поверхность (32, 33, 37, 38) является частью периферийной стенки датчика усилий.
5. Устройство по любому из пп. 1-3, отличающееся тем, что механизм (13) выполнен таким образом, что определяет поворотную связь с поворотом вокруг двух осей (15, 16) поворота, по меньшей мере, по существу, перпендикулярных по отношению к раме (12).
6. Устройство по п. 5, отличающееся тем, что содержит датчик (19) усилий, выполненный с возможностью измерения усилий при различных поворотных движениях органа (11) управления полетом, при этом датчик (19) усилий встроен между органом управления полетом и механизмом.
7. Воздушное судно, содержащее по меньшей мере одно устройство управления полетом, охарактеризованное в любом из пп. 1-6.
8. Воздушное судно, содержащее по меньшей мере один орган (11) управления полетом, связанный по меньшей мере с одним органом ведения, а именно по меньшей мере с одним рулем или по меньшей мере с одним двигателем воздушного судна, для управления его функционированием, а именно его положением и перемещениями, отличающееся тем, что содержит по меньшей мере одно устройство управления полетом, охарактеризованное в любом из пп. 1-6, для управления по меньшей мере одним органом ведения воздушного судна.
| US5264768 A, 23.11.1993 | |||
| US6189401 В1, 20.02.2001 | |||
| РУЧКА УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2000 |
|
RU2175290C2 |
| РУЧКА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1991 |
|
RU2018459C1 |

