Настоящее изобретение относится к испытательному приспособлению для испытаний работы контрольного устройства для рулевого привода самолета, такому как испытательное устройство для устройства обнаружения неисправности основного пути передачи нагрузки. Также описан связанный с ним способ испытаний работы контрольного устройства.
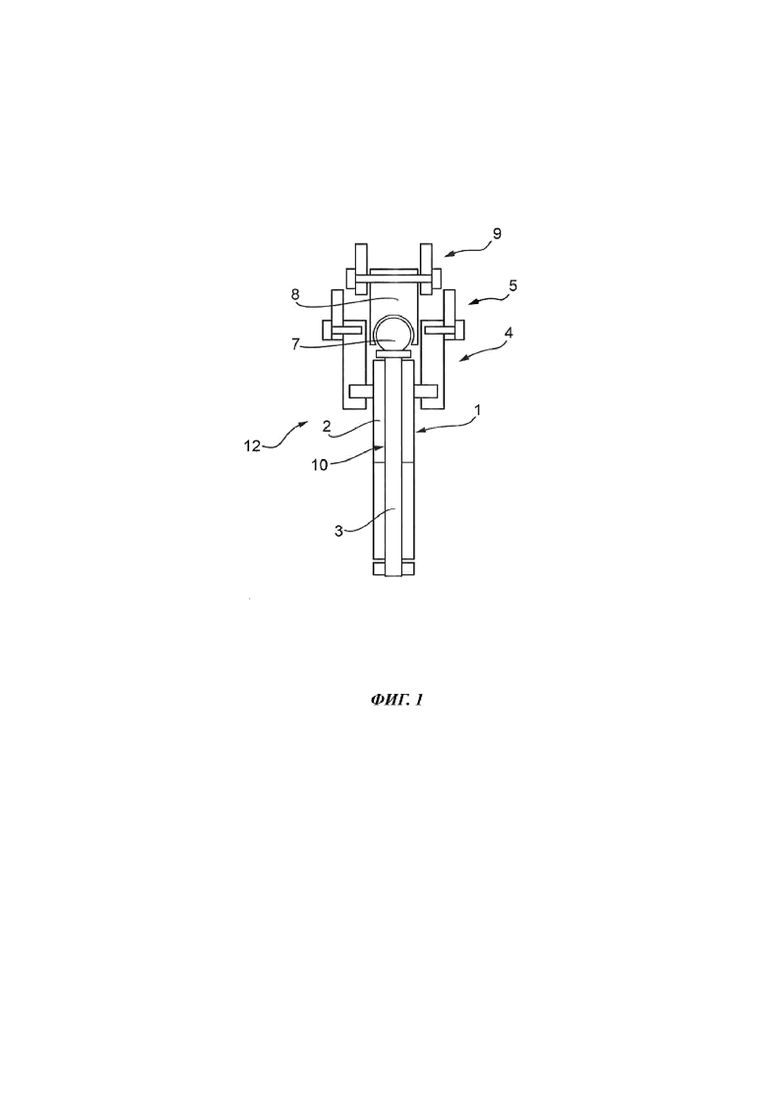
Широко известны рулевые приводы самолетов, содержащие два пути передачи механической нагрузки, один основной и другой вспомогательный, при этом последний предназначен для восприятия нагрузки, когда основной путь неисправен. В типичном устройстве предшествующего уровня техники, как показано на фиг. 1, при работе на основном пути нагрузки, нагрузки передаются через полый шариковый или роликовый ходовой винт. Полый ходовой винт вмещает предохранительный стержень, также называемый предохранительной тягой или соединительной тягой, которая соединена с винтом с небольшим люфтом. При обычной работе винта, когда основной путь передачи нагрузки работает правильно, вспомогательный путь передачи нагрузки, образованный этой соединительной тягой, не несет нагрузки, поскольку не находится в контакте вследствие небольшого люфта. Однако в случае неисправности винта в основном пути передачи нагрузки, соединительная тяга выполняет предохранительную функцию и обеспечивает непрерывность передачи нагрузок приводом.
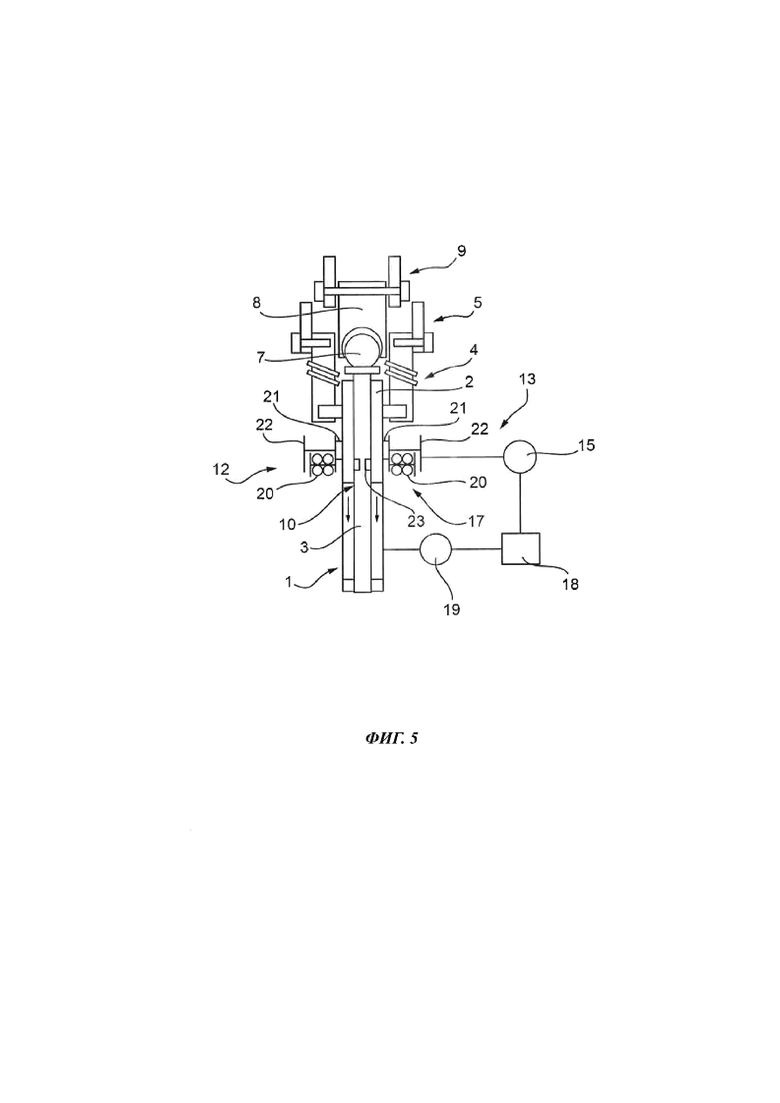
Как показано на фиг. 1, типичный известный привод управления полетом типа привода управляемого горизонтального стабилизатора (THSA) содержит основной путь передачи нагрузки с помощью полого винта 2, соединенного на верхнем конце с летательным аппаратом через систему 4 карданного шарнира, соединенную с первыми конструкционными элементами 5 летательного аппарата. Основной путь передачи нагрузки дополнительно содержит гайку винтовой пары (не показано), смонтированную на винте 2, и гайка винтовой пары соединена со стабилизатором летательного аппарата, причем данное соединение выполнено, например, с помощью другой системы карданного шарнира.
Вспомогательный путь передачи нагрузки выполнен посредством соединительной тяги 3, которая находится в винте 2. Соединительная тяга 3 оканчивается на своем верхнем конце охватываемым участком, в данном случае, имеющем форму сферической головки 7, которая установлена в полости на крепежном элементе 8. Крепежный элемент 8 соединен с конструкцией летательного аппарата посредством вторых конструкционных элементов 9 летательного аппарата. Известная система также может содержать некоторые устройства для предотвращения перемещения гайки винтовой пары относительно винта 2 и/или для фиксации стабилизатора на месте, когда основной путь передачи нагрузки неисправен. Таким образом, нижнее крепление, частью которого является гайка винтовой пары, может также содержать элементы вспомогательного пути передачи нагрузки, используемого при неисправности основного пути передачи нагрузки.
Рулевой привод самолета с описанными выше основными признаками можно найти в устройствах предшествующего уровня техники, например, в патентах США US 8702034 и US 2013/105263. Целесообразно обеспечить устройство обнаружения для обнаружения неисправности основного пути передачи нагрузки надежным и эффективным способом. Кроме того, желательно иметь возможность проверки правильности работы устройства обнаружения. На предшествующем уровне техники в патенте США US 2013/105263 раскрыто устройство для обнаружения разрушения основного пути в приводе управления полетом, при этом указанный привод имеет основной путь, содержащий вращающийся полый винт, и вспомогательный путь, содержащий предохранительный стержень, который реагирует на нагрузку, проходящую через винт. Устройство по патенту США US 2013/105263 содержит датчик положения, соединенный с винтом, для измерения данных, представляющих его угловое положение, и систему разъединения, выполненную с возможностью отсоединения датчика положения винта в случае относительного перемещения стержня относительно винта, если возникает прерывание основного пути. Таким образом, при возникновении неисправности основного пути система разъединения отсоединяет датчик положения винта, и пилот может быть предупрежден о неисправности основного пути. Преимущественно, данная система предшествующего уровня техники не нуждается в добавлении новых датчиков для обнаружения неисправности основного пути, поскольку обычно уже имеется датчик положения с целью определения положения винта и, следовательно, определения положения привода.
В европейском патенте EP3081481 раскрыто так называемое «бессенсорное» контрольное устройство для устройства обнаружения неисправности основного пути передачи нагрузки, в котором механическая связь имитирует разъединение датчика положения устройства обнаружения, за счет разрешения относительного перемещения по меньшей мере первого и второго механических частей привода, которые не могут перемещаться относительно друг друга в нормальном режиме эксплуатации, при отсутствии неисправности основного пути передачи нагрузки. Первый и второй механические части включают в себя механическую часть с перемещением, обнаруживаемым датчиком положения в устройстве обнаружения неисправности основного пути передачи нагрузки, которое в примере по патенту EP3081481 включает в себя разъединение вращения шестерни обратной связи по положению с использованием подпружиненного плавкого штока.
Устройство обнаружения неисправности основного пути передачи нагрузки и бессенсорное контрольное устройство, предложенное в патенте EP3081481, показаны на фиг. 2-9, которые более подробно описаны ниже. С помощью контрольного устройства этого типа устройство обнаружения неисправности основного пути передачи нагрузки может быть запущено посредством бессенсорного контрольного устройства, которое работает как чисто механическое. Благодаря использованию механической связи можно испытывать как механические элементы, так и электрические элементы в устройстве обнаружения неисправности основного пути передачи нагрузки, поскольку система использует механическое перемещение соответствующих частей, и проверка может быть выполнена с помощью электрических сигналов от датчика положения. Не требуются никакие дополнительные датчики, поскольку контрольное устройство использует тот же датчик, что и устройство обнаружения неисправности основного пути передачи нагрузки. Такое бессенсорное контрольное устройство обеспечивает высоконадежный способ обеспечения правильной работы устройства для обнаружения неисправности основного пути передачи нагрузки. Однако существует необходимость гарантии того, что само бессенсорное контрольное устройство находится в хорошем рабочем состоянии.
В соответствии с первым аспектом изобретения предложено испытательное приспособление для испытаний бессенсорного контрольного устройства привода, при этом бессенсорное контрольное устройство выполнено с возможностью использования путем механического перемещения штифта контрольного устройства из положения покоя в положение срабатывания, а затем высвобождения штифта контрольного устройства, чтобы позволить ему вернуться в положение покоя под воздействием упругого механизма возврата, при этом испытательное приспособление содержит: шток, выполненный с возможностью контакта с поверхностью привода, связанной со штифтом контрольного устройства; пружину штока, служащую для поджимания штока к поверхности привода, при этом пружина штока является более слабой, чем упругий механизм возврата контрольного устройства; и регулирующий и испытательный механизм; при этом регулирующий и испытательный механизм выполнен с возможностью: сжимания пружины штока и приложения нагрузки через шток к поверхности привода для перемещения поверхности привода таким образом, что обеспечивается возможность регистрации положения штока в начале перемещения поверхности привода, чтобы установить исходное положение, отпускания штифта контрольного устройства посредством штока и поверхности привода для имитации использования контрольного устройства, обеспечения возможности возврата штифта контрольного устройства в исходное положение под воздействием упругого механизма возврата, и указания на то, что штифт контрольного устройства достиг конечного положения после отпускания, с помощью указания на то, что поверхность привода больше не прилагает усилие к штоку, так что обеспечивается возможность сравнения конечного положения штифта контрольного устройства можно сравнивать с исходным положением.
Это приспособление может, преимущественно, обеспечивать полные механические испытания контрольного устройства на основе, во-первых, гарантии того, что устройство перемещается в требуемом интервале хода, и, во-вторых, гарантии того, что устройство возвращается в исходное положение после использования, или по меньшей мере, что какая-либо разница в положении находится в пределах заданных допусков. Таким образом, испытательное устройство может гарантировать, что отсутствует заедание или залипание частей, и что перемещение устройства находится в расчетных пределах.
Упругий механизм возврата контрольного устройства может состоять из одной или более пружин, или аналогичных упругих устройств, выполненных с возможностью поджимания контрольного устройства обратно в положение покоя. Например, штифт контрольного устройства может быть связан с пружиной, которая действует, чтобы толкать штифт контрольного устройства обратно в положение покоя после срабатывания для контроля привода. Штифт контрольного устройства перемещается под воздействием усилия, прилагаемого к поверхности срабатывания, и в некоторых случаях поверхность срабатывания может находиться на отдельной части, которая механически связана со штифтом контрольного устройства, такой как внешний привод. Внешний привод может иметь пружинный возврат или аналогичное упругое устройство, которое содействует упругому механизму возврата штифта контрольного устройства.
Пружина штока испытательного приспособления слабее, чем упругий механизм возврата, так что пружина штока будет сжиматься до того, как произойдет перемещение штифта контрольного устройства с преодолением сопротивления упругого механизма возврата. Пружина штока гарантирует, что шток будет оставаться в контакте с поверхностью привода, когда поверхность привода прекращает перемещение и, следовательно, что шток будет перемещаться относительно других частей испытательного приспособления, когда поверхность привода больше не прилагает усилие к штоку, то есть, когда упругий механизм возврата достиг конца хода. Таким образом, пружина штока может представлять собой упругое устройство с жесткостью пружины, которая меньше, чем жесткость упругого механизма возврата контрольного устройства, с которым будет использоваться испытательное приспособление. Следовательно, жесткость пружины штока может быть выбрана на основании известных характеристик контрольного устройства. Для гарантии отсутствия перемещения контрольного устройства, пока пружина штока сжата, жесткость пружины штока может быть меньше, чем половина жесткости упругого механизма возврата, при необходимости, меньше, чем четверть его.
Испытательное приспособление может содержать крепежную часть для крепления испытательного приспособления к корпусу, который обрамляет контрольное устройство. Это может быть корпус контрольного устройства или корпус большей системы, которая включает в себя контрольное устройство, такой как корпус устройства обнаружения неисправности основного пути передачи нагрузки, содержащий контрольное устройство, или корпус привода, который связан с контрольным устройством. Крепежная часть содержит соединительный механизм для надежного крепления испытательного приспособления к корпусу. Например, может быть использован резьбовой патрубок. В данном случае крепежное устройство может быть монтажной втулкой с винтовой резьбой. Использование крепежной части для надежного крепления испытательного приспособления к корпусу гарантирует, что положение штифта контрольного устройства относительно испытательного приспособления также является положением штифта контрольного устройства относительно корпуса, что, в свою очередь, гарантирует, что какое-либо несогласованное перемещение механической связи, связанной со штифтом контрольного устройства, может быть надежно идентифицировано вследствие разницы между исходным положением и конечным положением.
Регулирующий и испытательный механизм может содержать регулировочную часть, выполненную с возможностью перемещения относительно других элементов испытательного приспособления, чтобы сжимать пружину штока и поджимать шток для обеспечения нагрузки, прилагаемой к поверхности привода через шток. Регулирующий и испытательный механизм может содержать испытательную часть, выполненную с возможностью перемещения относительно других частей испытательного приспособления, для перемещения штока и приложения нагрузки к поверхности привода через шток, чтобы перемещать штифт контрольного устройства с преодолением сопротивления упругого механизма возврата. Испытательная часть может быть выполнена с возможностью перемещения штока и продвижения поверхности привода контрольного устройства на расстояние, достаточное для ввода контрольного устройства в действие. Например, в случае контрольного устройства, которое работает с использованием механической связи, которая имитирует разъединение датчика положения за счет допущения относительного перемещения по меньшей мере первой и второй механических частей привода, тогда испытательная часть может быть выполнена с возможностью перемещения поверхности привода на расстояние, достаточное для имитации разъединения датчика положения. Таким образом, степень перемещения испытательной части для быстрого перемещения поверхности привода с помощью нагрузки, приложенной посредством испытательной части, может быть задана на основе известной степени перемещения контрольного устройства.
Исходное положение и конечное положение может быть определено на основании относительного положения штока и другой части испытательного приспособления. Например, исходное положение и конечное положение может быть определено на основании относительного положения штока и части регулирующего и испытательного механизма. В одном примере исходное положение и конечное положение определяют путем выравнивания испытательной части регулирующего и испытательного механизма с меткой совмещения на штоке и последующего измерения расстояния между испытательной частью и регулировочной частью регулирующего и испытательного механизма. Это можно выполнить путем измерения (расстояния) между опорными точками на регулирующем и испытательном механизме, или в качестве альтернативы регулирующий и испытательный механизм может содержать шкалу, обеспечивающую измерение, считываемое с регулирующего и испытательного механизма.
Регулирующий и испытательный механизм может быть прикреплен к крепежной части, чтобы обеспечить перемещение относительно корпуса при использовании испытательного приспособления. В одном примере регулировочная часть регулирующего и испытательного механизма прикреплена с возможностью перемещения к крепежной части, а испытательная часть регулирующего и испытательного механизма прикреплена с возможностью перемещения к регулировочной части. В креплении с возможностью перемещения может использоваться, например, винтовая резьба. Регулировочная часть может иметь форму регулировочной гайки с резьбой для крепления с возможностью перемещения регулировочной гайки к крепежной части. Как регулировочная гайка, так и испытательная часть может содержать винтовую резьбу для крепления с возможностью перемещения испытательной части к регулировочной гайке, и в этом случае испытательная часть может иметь форму испытательной гайки.
В соответствии с описанной выше компоновкой, испытательное приспособление может содержать крепежную часть для соединения с корпусом, регулировочную гайку, прикрепленную с возможностью перемещения к монтажной втулке, и испытательную гайку, прикрепленную с возможностью перемещения к регулировочной гайке. Регулировочная гайка может быть выполнена с возможностью перемещения относительно крепежной части для сжимания пружины штока и ввода испытательной гайки в механически связанную компоновку с поверхностью привода через шток. Испытательная гайка может быть выполнена с возможностью перемещения относительно регулировочной гайки для перемещения штока и, следовательно, перемещения поверхности привода для работы контрольного устройства. Если в испытательной гайке используется винтовая резьба для соединения с регулировочной гайкой, то испытательная гайка может быть завинчена и отвинчена, чтобы опускать штифт контрольного устройства посредством штока и поверхности привода, а затем позволять штоку контрольного устройства возвращаться в исходное положение под воздействием упругого механизма возврата.
Испытательное приспособление может содержать направляющую часть штока для удерживания штока и направления перемещения штока. Направляющая часть штока также может иметь функцию удерживания пружины штока, так что обеспечивается возможность сжатия пружины штока между штоком и направляющей частью штока. Направляющая часть штока может иметь форму внутренней втулки, которая расположена по окружности штока, и которая может плотно прилегать к штоку, чтобы направлять движение со скольжением штока во внутренней втулке. Направляющая часть штока может удерживаться в крепежной части, и при необходимости может быть прикреплена с возможностью перемещения к крепежной части, например, с помощью компоновки со скольжением. Таким образом, направляющая часть штока может перемещаться относительно штока и/или с ним, а также перемещаться относительно крепежной части и, следовательно, перемещаться относительно корпуса.
Направляющая часть штока может содержать буртик для взаимодействия со штоком и его толкания. В этом случае регулирующий и испытательный механизм может быть выполнен с возможностью вхождения в контакт с направляющей частью штока, для толкания буртика направляющей части штока во взаимодействие со штоком, чтобы перемещать шток и тем самым перемещать штифт контрольного устройства. Если регулирующий и испытательный механизм содержит регулировочную часть и испытательную часть, то испытательная часть может быть введена в контакт с направляющей частью штока, чтобы толкать буртик направляющей часть штока для вхождения во взаимодействие со штоком. Это может быть выполнено путем перемещения регулировочной части для перемещения испытательной части относительно крепежной части. Испытательная часть затем может быть перемещена относительно регулировочной части, чтобы толкать шток и отпускать штифт контрольного устройства, как указано выше.
В одном примере испытательное приспособление содержит: монтажную втулку с соединительным механизмом для надежного крепления испытательного приспособления к корпусу; внутреннюю втулку, удерживаемую для перемещения со скольжением относительно монтажной втулки, при этом внутренняя втулка удерживает и направляет перемещение штока, удерживает пружину штока, так что пружина штока может быть сжата между штоком и внутренней втулкой, и содержит буртик для взаимодействия со штоком и его толкания; регулировочную гайку, прикрепленную с возможностью перемещения к монтажной втулке; и испытательную гайку, прикрепленную с возможностью перемещения к регулировочной гайке; при этом перемещение регулировочной гайки приведет к введению испытательной гайки в контакт с внутренней втулкой для нагружения пружины штока и введения буртика внутренней втулки во взаимодействие со штоком; причем последующее перемещение испытательной гайки приведет к перемещению штока и, тем самым, к перемещению поверхности привода, чтобы обеспечить отпускание штифта контрольного устройства; и при этом шток снабжен меткой совмещения для выравнивания с испытательной гайкой для определения исходного положения и конечного положения.
В одном примере испытательное приспособление встроено в систему для контроля рулевого привода самолета, причем рулевой привод содержит бессенсорное контрольное устройство, а система содержит бессенсорное контрольное устройство и испытательное приспособление. Бессенсорное контрольное устройство может представлять собой контрольное устройство для устройства обнаружения неисправности основного пути передачи нагрузки в рулевом приводе самолета такого типа, который отсоединяет датчик положения от основного пути передачи нагрузки в случае неисправности основного пути передачи нагрузки, при этом контрольное устройство содержит: механическую связь для имитации разъединения датчика положения за счет допущения относительного перемещения по меньшей мере первой и второй механических частей привода, которые не могут перемещаться относительно друг друга в нормальном режиме эксплуатации, при отсутствии неисправности основного пути передачи нагрузки, при этом первая и вторая механические части содержат первую механическую часть с перемещением, обнаруживаемым датчиком положения устройства обнаружения неисправности основного пути передачи нагрузки.
Устройство обнаружения неисправности основного пути передачи нагрузки может быть такого типа, который содержит датчик положения в качестве первого датчика положения для обнаружения положения основного пути передачи нагрузки на основании перемещения первой механической части, а также содержит второй датчик положения для обнаружения положения основного пути передачи нагрузки на основании перемещения второй механической части. Преимущественно два датчика положения и связанные с ними механические части могут быть элементами, которые уже имеются в системе рулевого привода самолета, следовательно, во избежание необходимости введения дополнительных механических или электрических частей для реализации устройства обнаружения неисправности основного пути передачи нагрузки. Это также сводит к минимуму количество дополнительных частей, необходимых для контрольного устройства.
Устройство обнаружения неисправности основного пути передачи нагрузки может быть такого типа, который содержит разъединяемый элемент, обычно подсоединенный между механическими частями, и действующий для препятствования их относительному перемещению, и этот разъединяемый элемент может быть использован как часть контрольного устройства. Таким образом, контрольное устройство может включать в себя разъединяемый элемент устройства обнаружения неисправности основного пути передачи нагрузки, при этом разъединяемый элемент подсоединен между механическими частями, как указано выше. Разъединяемый элемент преимущественно выполнен с возможностью разъединения после возникновения неисправности основного пути передачи нагрузки, при этом разъединение разъединяемого элемента приводит к отсоединению датчика положения от основного пути передачи нагрузки, при необходимости путем отсоединения первой механической части от основного пути передачи нагрузки.
Разъединяемый элемент может представлять собой разъединяемый штифтовой элемент, например, штифт, который в нормальном режиме эксплуатации подсоединен между элементами основного пути передачи нагрузки и вспомогательного пути передачи нагрузки, и отсоединяется после возникновения неисправности основного пути передачи нагрузки. Одной из возможных форм разъединяемого штифтового элемента является разрушаемый штифт (или плавкий штифт), выполненный с возможностью разрушения, когда нагрузка передается от основного пути передачи нагрузки к вспомогательному пути передачи нагрузки. Подходящий разрушаемый штифт раскрыт, например, в патентной заявке US 2013/105623. В этом случае разъединение штифта имеет вид срезания части штифта, вначале удерживаемого на вспомогательном пути передачи нагрузки, с последующим свободным вращением штифта.
Датчик положения и, при необходимости, второй датчик положения, при его наличии, может быть датчиком какого-либо подходящего типа, например, датчиком для обнаружения углового положения механической части, или датчиком для обнаружения линейного перемещения, в котором угловое положение или линейное перемещение происходит в результате изменения положения задающего элемента основного пути передачи нагрузки, который может быть, например, винтом.
В некоторых примерах реализации изобретения механические части являются шестернями, соединенными с винтом в основном пути передачи нагрузки привода. Шестерни могут быть выполнены так, что в нормальном режиме эксплуатации они вращаются совместно, а механическая связь контрольного устройства может быть выполнена так, что, будучи задействованной, она перемещает одну из шестерен относительно другой. Предпочтительно перемещение шестерни, которая движется, обнаруживается датчиком положения. При такой компоновке будет понятно, что можно с легкостью обеспечить правильную работу устройства обнаружения неисправности основного пути передачи нагрузки, поскольку, когда механическая связь контрольного устройства приведена в действие, будет испытываться как механическое функционирование шестерен, так и работа электрических элементов датчика положения. Следовательно, устройство обнаружения неисправности основного пути передачи нагрузки обеспечивает сигнал, указывающий неисправность основного пути передачи нагрузки, когда задействуется контрольное устройство. Оператор может удостовериться, что устройство обнаружения неисправности основного пути передачи нагрузки работает правильно, с помощью контрольного устройства и без необходимости в обширных процедурах испытаний.
Одной из возможных форм механической связи является соединительный стержень, подсоединенный между разъединяемым элементом контрольного устройства (который может быть разъединяемым элементом устройства обнаружения неисправности основного пути передачи нагрузки, как указано выше) и первой механической частью, при этом соединительный стержень выполнен с возможностью перемещения первой механической части относительно второй механической части, когда механическая связь приведена в действие. В примере первая механическая часть является первой шестерней, первый конец соединительного стержня закреплен на ползуне, допускающем перемещение стержня в радиальном направлении шестерни, а второй конец соединительного стержня проходит в щелевое отверстие, причем щелевое отверстие имеет протяженность по диагонали, как вдоль радиального направления, так и вдоль направления по окружности шестерни. Таким образом, когда ползун перемещается в радиальном направлении, и первый конец соединительного стержня, следовательно, перемещается в радиальном направлении, второй конец соединительного стержня поджимается вдоль щелевого отверстия, что приводит к относительному перемещению по окружности шестерни и разъединяемого элемента и, следовательно, к имитации временного разъединения шестерни.
Первый конец соединительного стержня может быть соединен с ползуном на разъединяемом элементе, со вторым концом соединительного стержня, проходящим в щелевое отверстие, выполненное в шестерне. Такая компоновка обеспечивает простое введение в действие механической связи путем прижимания ползуна и/или разъединяемого элемента в радиальном направлении. В этом случае ползун может быть выполнен в виде втулки, соединенной с разъединяемым элементом, при этом разъединяемый элемент перемещается вместе с втулкой и, при необходимости, втулка также перемещается относительно разъединяемого элемента. Альтернативно, возможно, чтобы ползун находился на шестерне, а щелевое отверстие было выполнено на разъединяемом элементе. Соединительный стержень может быть выполнен заодно с ползуном или удерживается в отверстии на ползуне.
Механическая связь контрольного устройства может быть выполнена с возможностью задействования извне рулевого привода самолета, т. е без необходимости снятия корпуса рулевого привода самолета. В некоторых примерах варианта реализации механическая связь задействуется путем управления кнопкой или рычагом извне корпуса рулевого привода самолета, при работе кнопки или рычага, перемещающего подвижные механические части внутри корпуса. Контрольное устройство может содержать кнопку, выполненную с возможностью линейного перемещения и доступную извне корпуса рулевого привода самолета, при линейном перемещении кнопки, приводится в действие механическая связь, например, путем обеспечения линейного перемещения ползуна, перемещающего соединительный стержень, как указано выше.
Механическая связь может быть выполнена с пружинным возвратом или другим упругим механизмом, который противодействует усилиям, прилагаемым для задействования механической связи, и возвращает механическую связь в положение покоя после прекращения действия этих усилий. При наличии ползуна, как указано выше, может иметься пружинный возврат для поджимания ползуна в положение покоя, когда первая шестерня перемещается вместе со второй механической частью. Это гарантирует, что во время нормального режима эксплуатации устройство обнаружения неисправности основного пути передачи нагрузки не будет задействовано.
В одном примере испытательное приспособление включено в систему для проверки рулевого привода самолета, при этом рулевой привод содержит устройство обнаружения неисправности основного пути передачи нагрузки, содержащее бессенсорное контрольное устройство, которое описано выше, и при этом система содержит рулевой привод самолета, а также испытательное приспособление, как указано выше. Устройство обнаружения неисправности основного пути передачи нагрузки может иметь признаки, указанные выше, и, в частности, может содержать датчик положения, соединенный с винтом привода и служащий для измерения данных, связанных с положением винта, вместе с системой разъединения, выполненной с возможностью отсоединения датчика положения от винта в случае неисправности основного пути передачи нагрузки, например, в результате относительного смещения винта основного пути передачи нагрузки по сравнению со стержнем вспомогательного пути передачи нагрузки привода.
Устройство обнаружения может содержать вычислительное устройство, выполненное с возможностью получения данных от датчика положения, получения данных измерений вторым датчиком положения, независимым от системы разъединения, и сравнения данных от двух датчиков положения для указания на то, что возникла неисправность основного пути передачи нагрузки.
В другом аспекте изобретения предложено крепление, например, нижнее крепление для рулевого привода самолета, при этом крепление содержит устройство обнаружения неисправности основного пути передачи нагрузки, как указано выше.
В другом аспекте изобретения дополнительно предложен привод управления полетом, содержащий: основной путь передачи нагрузки с полым винтом, вспомогательный путь передачи нагрузки, имеющий стержень, проходящий через винт, при этом вспомогательный путь передачи нагрузки выполнен с возможностью принимать нагрузку, приложенную к основному пути передачи нагрузки в случае прерывания основного пути передачи нагрузки; и устройство обнаружения неисправности основного пути передачи нагрузки, содержащее контрольное устройство, как указано выше.
В соответствии с еще одним аспектом в изобретении предложен способ испытания работы бессенсорного контрольного устройства для устройства обнаружения неисправности основного пути передачи нагрузки, при этом бессенсорное контрольное устройство имеет поверхность привода, связанную со штифтом контрольного устройства, и упругий механизм возврата для возвращения поверхности привода и штифта контрольного устройства в исходное положение после использования, при этом способ включает: приведение штока испытательного приспособления в контакт с поверхностью привода, связанной со штифтом контрольного устройства, при этом пружина штока испытательного приспособления поджимает шток к поверхности привода, и при этом пружина штока является более слабой, чем упругий механизм возврата контрольного устройства; сжимание пружины штока до тех пор, пока не будет обеспечена возможность приложения нагрузки через шток к поверхности привода для перемещения поверхности привода; регистрацию положения штока в начале перемещения поверхности привода для установления исходного положения; отпускание штифта контрольного устройства с использованием испытательного приспособления для имитации использования контрольного устройства; высвобождение штифта контрольного устройства и обеспечение возможности его возвращения в исходное положение под воздействием упругого механизма возврата; определение того, что штифт контрольного устройства достиг конечного положения, путем определения того, что поверхность привода больше не прилагает усилие к штоку; и сравнение конечного положения штифта контрольного устройства с исходным положением для гарантии того, что штифт контрольного устройства возвращается в исходное положение.
Данный способ гарантирует правильную работу бессенсорного контрольного устройства, как указано выше, в отношении испытательного приспособления по первому аспекту. В способе может быть использовано испытательное устройство по первому аспекту. Этап сравнения конечного положения штифта контрольного устройства с исходным положением для гарантии, что штифт контрольного устройства возвращается в исходное положения, может включать визуальный контроль для выравнивания испытательного приспособления со штифтом контрольного устройства, например, путем проверки выравнивания одной или более метки (меток) по меньшей мере одного из испытательного приспособления и штифта контрольного устройства.
Способ может включать использование испытательного приспособления, имеющего какой-либо из признаков, указанных выше, при необходимости в связи с бессенсорным контрольным устройством, имеющим какой-либо из признаков, указанных выше. Бессенсорное контрольное устройство может быть включено в устройство обнаружения неисправности основного пути передачи нагрузки, как указано выше, которое само может быть частью крепления или рулевого привода самолета, как указано выше. Способ может быть выполнен во время обслуживания летательного аппарата.
Некоторые предпочтительные варианты реализации изобретения далее будут описаны только в качестве примера и со ссылками на прилагаемые чертежи, на которых:
На фиг. 1 показан рулевой привод самолета предшествующего уровня техники;
На фиг. 2 приведено схематическое представление известного устройства обнаружения для обнаружения неисправности основного пути передачи нагрузки в приводе управления полетом;
На фиг. 3 показано устройство обнаружения и привод по фиг. 2 при возникновении неисправности основного пути передачи нагрузки;
На фиг. 4 приведено схематическое представление привода управления полетом, аналогичного приводу по фиг. 2, с устройством обнаружения, показанным более подробно;
На фиг. 5 показано устройство обнаружения и привод по фиг. 2 при возникновении неисправности основного пути передачи нагрузки;
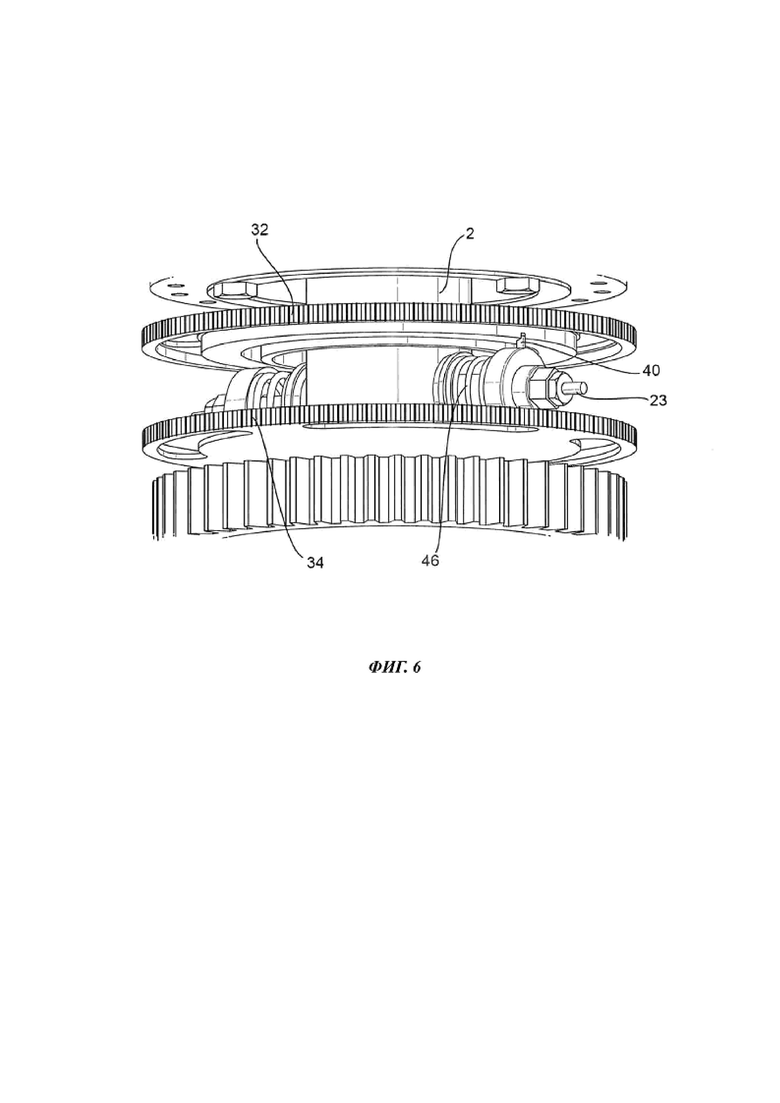
На фиг. 6 показаны части привода, включая устройство обнаружения для обнаружения неисправности основного пути передачи нагрузки, а также контрольное устройство, для гарантии того, что устройство обнаружения работает правильно;
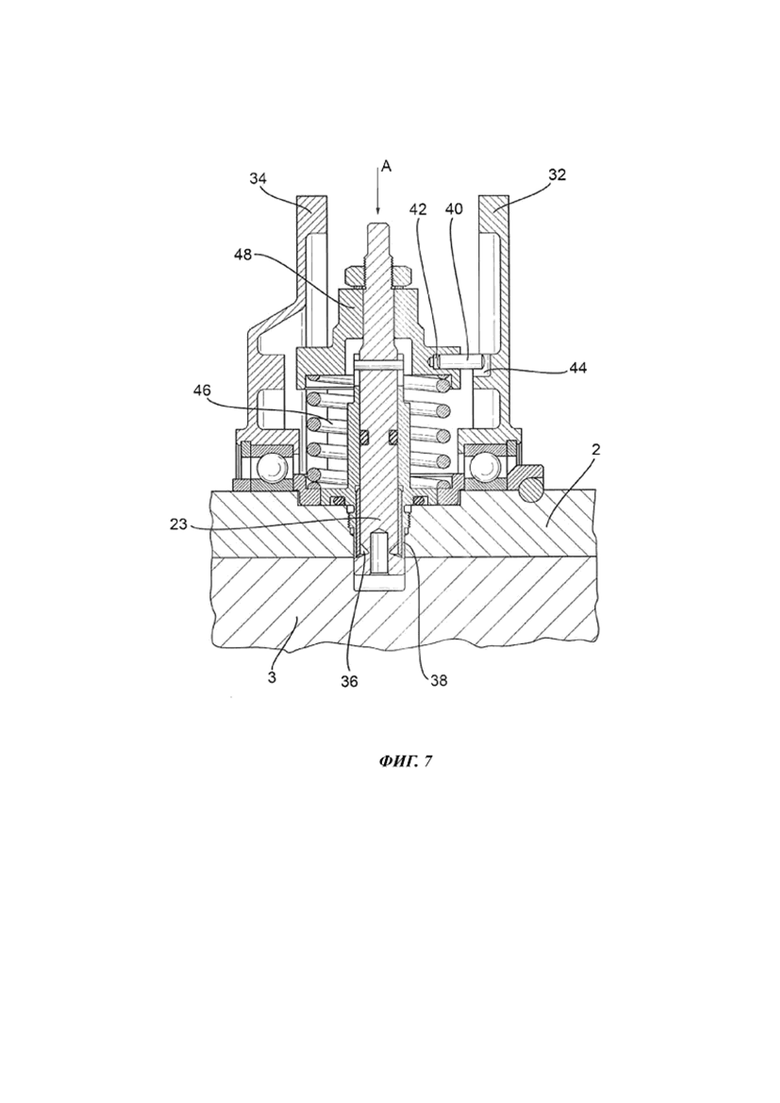
На фиг. 7 показаны аналогичные части по фиг. 6 в поперечном разрезе;
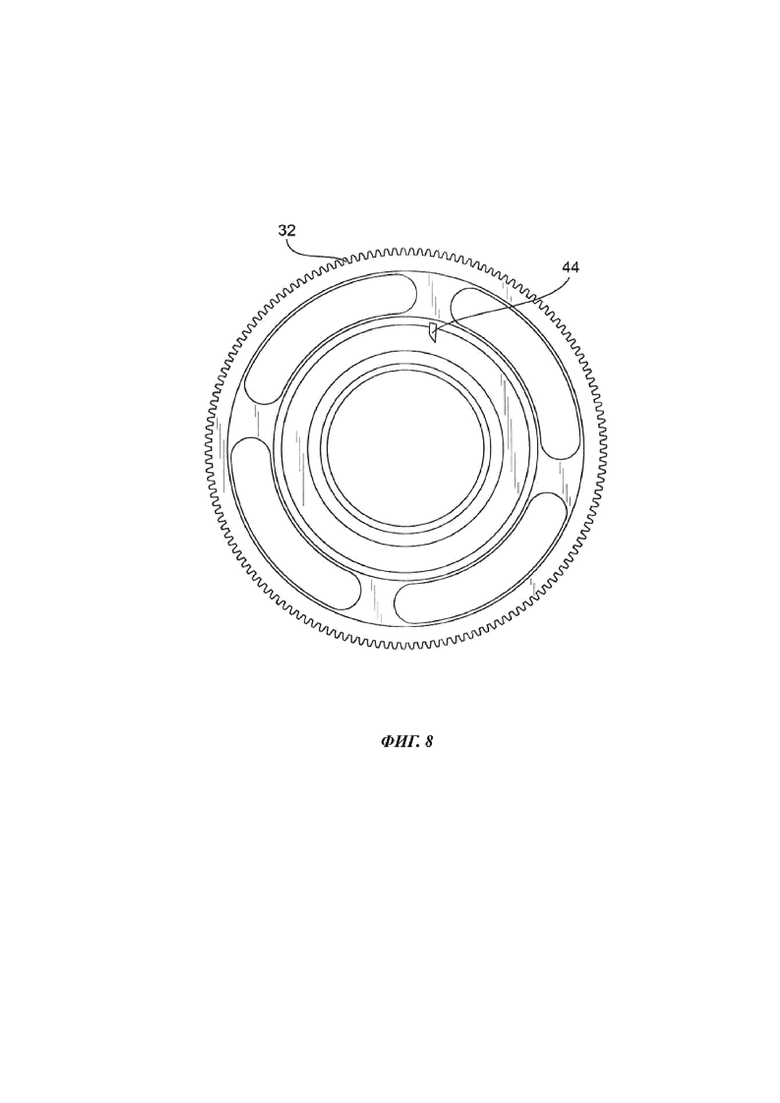
На фиг. 8 приведена шестерня обратной связи от системы измерения углового положения привода и проиллюстрирована связь между шестерней обратной связи и контрольным устройством по фиг. 6 и 7;
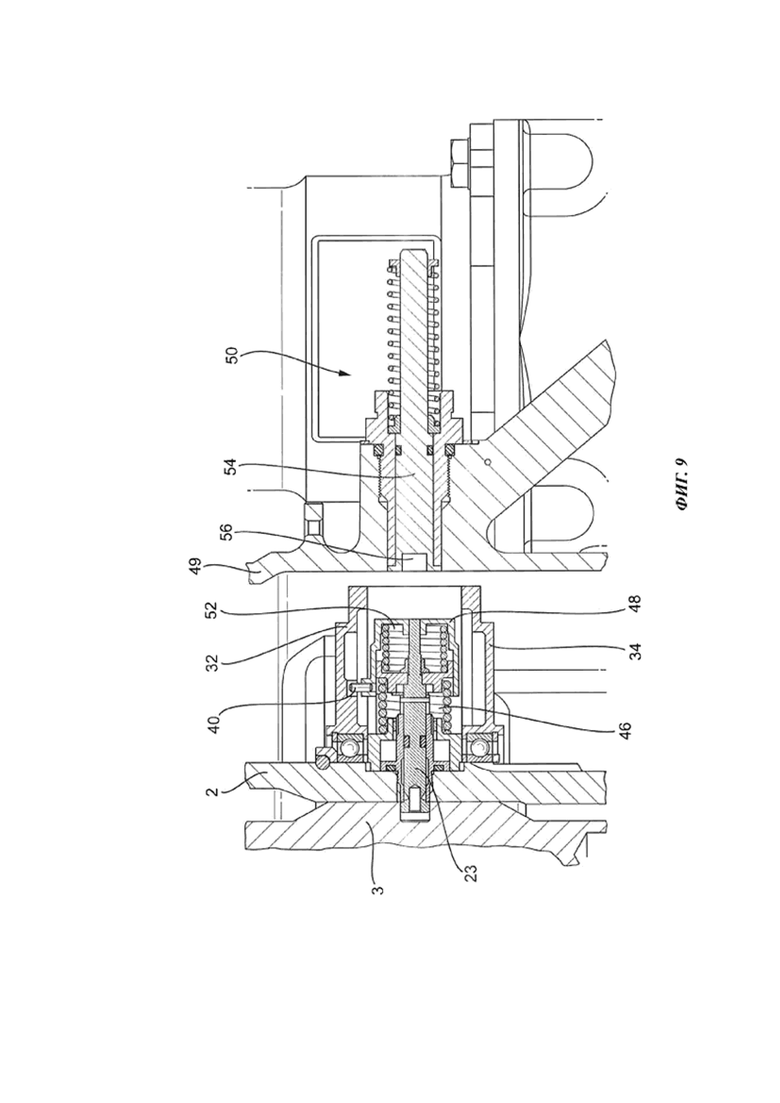
На фиг. 9 приведен поперечный разрез контрольного устройства, аналогичного устройству по фиг. 6 и 7, встроенного в корпус, имеющий внешний привод для контрольного устройства, и
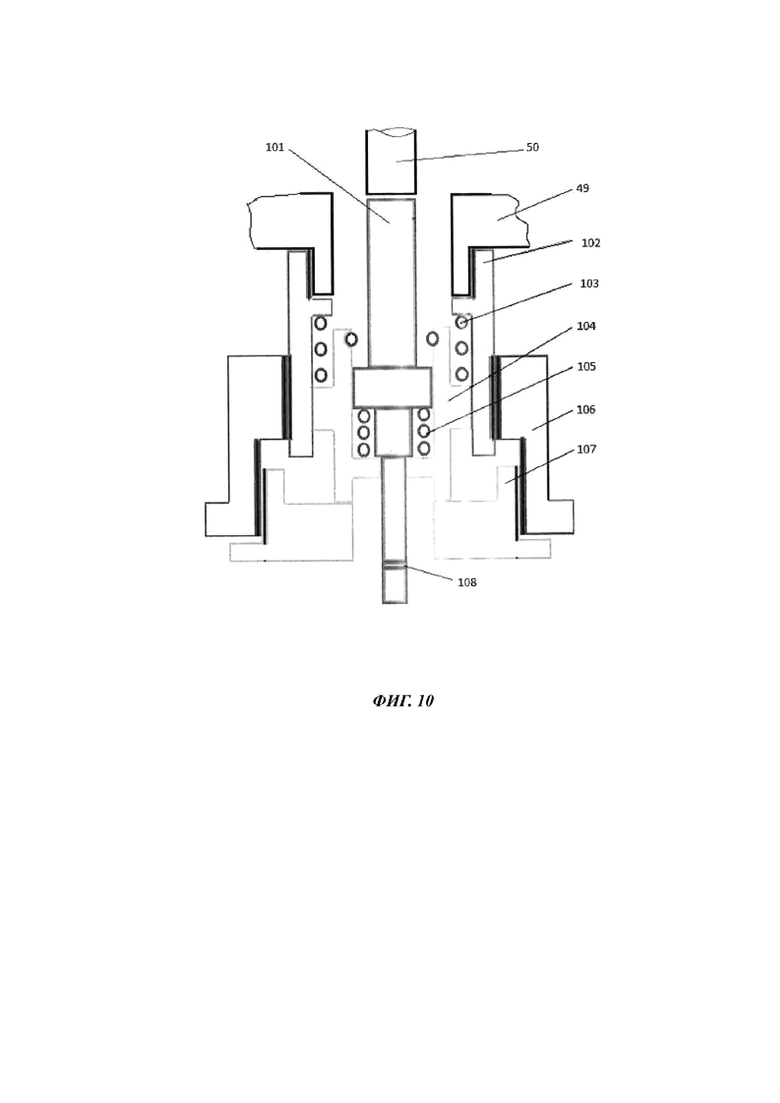
На фиг. 10 показано испытательное приспособление для испытания работы контрольного устройства, показанного на фиг. 6-9.
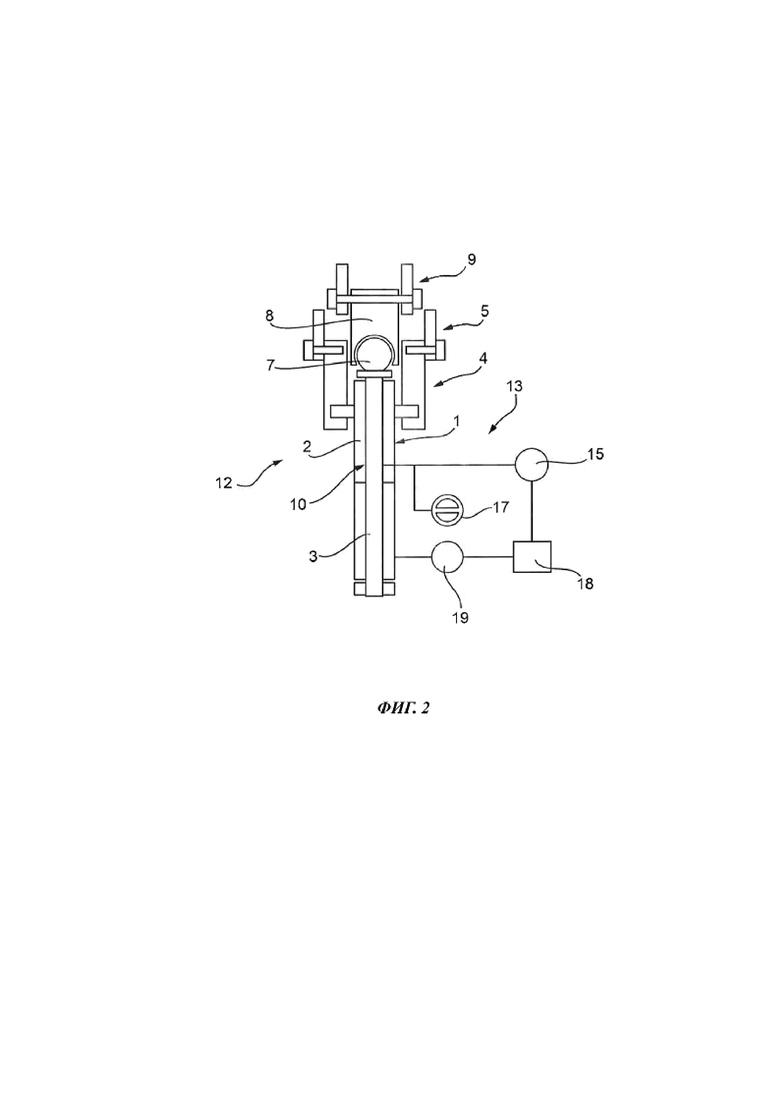
На фиг. 2 показано устройство 13 обнаружения неисправности основного пути передачи нагрузки для привода 12 управления полетом. Привод 12 управления полетом содержит основной путь 1 передачи нагрузки и вспомогательный путь 10 передачи нагрузки. Привод 12 представляет собой, например, тип THSA привода для управления изменяемой горизонтальной поверхностью управления летательного аппарата (не показано). Основной и вспомогательный пути 1, 10 передачи нагрузки содержат многочисленные элементы, и будут описаны лишь некоторые из этих элементов. Известна базовая конструкция приводов управления полетом, содержащая основной и вспомогательный путь передачи нагрузки.
В настоящем документе описан привод механического типа, с использованием вращающегося винта 2 для управления линейным перемещением. Основной путь 1 передачи нагрузки, следовательно, содержит вращающийся полый винт 2, оканчивающийся на одном из концов в крепежном элементе, называемом главным верхним фиксатором 4, через который он соединен с конструкцией 5 летательного аппарата. Обычно основной путь 1 передачи нагрузки также содержит гайку (не показано), взаимодействующую с винтом, будучи собранной с ним, которая связана с управляемой поверхностью. Винт 2 является управляемым путем вращения двигателя, что обеспечивает перемещение гайки при поступательном движении, при этом последняя блокируется при вращении с этой целью. Таким образом, перемещение при поступательном движении гайки обеспечивает управление отклонением, которое необходимо придавать изменяемой горизонтальной поверхности.
Предохранительный стержень 3 проходит через внутреннее пространство полого винта 2. Предохранительный стержень является одним из элементов вспомогательного пути 10 передачи нагрузки. Как правило, указанный стержень 3 оканчивается сферической головкой 7, расположенной с некоторым люфтом в сферической полости крепежного элемента 8 вспомогательного пути передачи нагрузки, называемого вспомогательным верхним фиксатором. Указанный вспомогательный верхний фиксатор 8, в свою очередь, связан с летательным аппаратом посредством крепежного элемента 9 летательного аппарата, отличающегося от того, который используют для поддержки основного пути 1 передачи нагрузки. Крепление вспомогательного верхнего фиксатора, по сути, известно и выполнено с помощью систем с использованием крепежных скоб и винтов.
В «нормальном» режиме эксплуатации нагрузки передаются по основному пути 1 передачи нагрузки. В случае возникновения неисправности основного пути 1 передачи нагрузки, в частности, при разрушении одного из элементов, составляющих основной путь 1 передачи нагрузки, такого как, например, главный верхний фиксатор 4 или винт 2, нагрузку принимает вспомогательный путь 10 передачи нагрузки. Этот отказ должен быть обнаружен, чтобы информировать пилота, и, при необходимости, начать операции технического обслуживания на земле или, возможно, в полете.
Устройство 13 обнаружения неисправности основного пути передачи нагрузки обладает возможностью обнаружения таких отказов. Устройство 13 обнаружения неисправности основного пути передачи нагрузки содержит датчик 15 положения, связанный с винтом 2 для измерения данных, представляющих его положение. Датчик 15 может быть датчиком 15 углового положения. Датчик 15 углового положения выполнен с возможностью измерения углового положения винта 2 и/или его углового смещения. Сюда может входить угловое смещение и/или угловое положение, которое может быть абсолютным или относительным, в зависимости от выбранных условий. Таким образом, когда датчик 15 и винт 2 связаны, датчик 15 измеряет угловое положение винта 2. Датчик 15 углового положения может, например, быть активным электрическим (индуктивным) вращательным датчиком измерения смещения типа RVDT (Rotary Variable Differential Transformer (дифференциальный преобразователь вращательных перемещений)). Могут быть использованы другие датчики углового положения.
Альтернативно, данные, представляющие положение винта, могут включать датчик линейного положения, такой как датчик измерения линейного смещения типа LVDT (Linear Variable Differential Transformer (дифференциальный преобразователь линейных перемещений)). В данном случае датчик 15 линейного положения связан с винтом 2, например, через механизм типа шарикового винта, который преобразует вращательное движение винта 2 в поступательное движение. Следовательно, датчик 15 линейного положения измеряет положение или смещение, являющееся линейным, но представляет угловое положение винта 2.
Может быть использован какой-либо датчик 15 положения, обладающий возможностью измерения данных, представляющих положение винта 2, то есть, такой, в котором измеренные данные (например, положения) коррелируют с угловым положением винта 2 и, следовательно, позволяют делать вывод о положении винта.
Устройство 13 обнаружения неисправности основного пути передачи нагрузки содержит систему 17 разъединения, выполненную с возможностью отсоединения винта 2 от датчика 15 положения в случае относительного смещения стержня 3 относительно винта 2 после прерывания основного пути 1 передачи нагрузки. Таким образом, указанное разъединение приводит к прерыванию связи между датчиком 15 и винтом 2. Преимущественно, система 17 разъединения откалибрована для разъединения связи между винтом 2 и датчиком 15 только в случае прерывания основного пути 1 передачи нагрузки.
В случае разрушения элемента основного пути 1 передачи нагрузки, нагрузку принимает вспомогательный путь 10 передачи нагрузки. Затем стержень 3 подвергается относительному смещению относительно винта 2, причем указанное смещение по существу ориентировано параллельно винту 2, при поступательном движении в одном направлении или в другом. При системе данного типа относительное смещение стержня 3 относительно винта 2 обнаруживается системой 17 разъединения, что затем приводит к разъединению между винтом 2 и датчиком 15 положения. Указанное разъединение запускается в момент, когда относительное смещение стержня 3 относительно винта 2 или величина нагрузки, приложенной к стержню 3, превышает заданное пороговое значение для смещения или нагрузки, причем заданное пороговое значение соответствует прерыванию основного пути 1 передачи нагрузки. Пороговое значение, например, может быть найдено по имитации или по измерениям на месте. Целью является недопущение ложных обнаружений вследствие относительного перемещения между винтом 2 и стержнем 3 и/или нагрузок на стержень 3, которые не являются результатом неисправности основного пути 1 передачи нагрузки. Только достаточно большая нагрузка или относительное смещение стержня 3 относительно винта 2 выше указанного порогового значения соответствует неисправности основного пути 1 передачи нагрузки.
Ниже заданного порогового значения система 17 разъединения не разрывает связь между винтом 2 и датчиком 15 положения, что позволяет избежать ложных обнаружений. Система разъединения может включать датчик или набор датчиков, подходящих для измерения относительного перемещения стержня 3 относительно винта 2 (или наоборот), что позволяет отсоединять винт 2 от датчика 15 положения только в случае прерывания основного пути 1 передачи нагрузки. Альтернативно, система 17 разъединения выполнена с возможностью отсоединения датчика 15 положения от винта 2, когда стержень 3 прилагает заданную нагрузку к винту 2, соответствующую механической силе, действующей посредством стержня 3 на винт 2, после прерывания основного пути 1 передачи нагрузки. Таким образом, пороговое значение для обнаружения неисправности основного пути передачи нагрузки может быть реализовано с помощью одной только механической системы, во избежание необходимости в дополнительных электрических компонентах. В случае прерывания основного пути передачи нагрузки стержень 3 перемещается относительно винта 2 и затем прилагает к винту 2 механическую нагрузку, которая больше, чем заданное пороговое значение, при этом указанная механическая нагрузка используется системой 17 разъединения для механического отсоединения винта 2 от датчика 15 положения в случае прерывания основного пути 1 передачи нагрузки.
Устройство 13 обнаружения неисправности основного пути передачи нагрузки дополнительно содержит вычислительное устройство 18, выполненное с возможностью сравнения данных, представляющих угловое положение винта 2, измеряемых датчиком 15 положения, и данных, представляющих угловое положение винта 2, измеряемых вторым датчиком 19 положения устройства обнаружения 13. Когда датчик 15 положения отсоединен, данные от двух датчиков положения не будут согласовываться. Поэтому просто определить, когда устройство 13 обнаружения неисправности основного пути передачи нагрузки указывает на неисправность основного пути передачи нагрузки.
Данные, представляющие угловое положение винта 2, измеряемые вторым датчиком 19 положения, могут быть самим угловым положением или могут быть данными измерения линейного положения, как указано выше. Второй датчик 19 положения отличается от датчика 15 тем, что он не связан с винтом 2 через систему 17 разъединения. Следовательно, второй датчик 19 положения независим от системы 17 разъединения. Кроме того, обычно это датчик того же типа, способный измерять данные, представляющие угловое положение винта 2. Если два датчика идентичны, просто сравнивать их выходные сигналы для определения неисправности основного пути передачи нагрузки.
Этот второй датчик 19 положения, принадлежащий самому летательному аппарату, используют для управления и подстройки вращения винта 2 в «нормальном» режиме эксплуатации. Преимуществом может быть, в частности, датчик углового положения, связанный с винтом 2 и имеющийся во всех приводах управления полетом, что позволяет избежать установки новых датчиков. Преимущественно, датчик 15 положения и второй датчик 19 положения встроены в один и тот же многоканальный датчик.
Таким образом, устройство 13 обнаружения неисправности основного пути передачи нагрузки позволяет использовать датчики, уже имеющиеся на летательном аппарате, просто путем объединения устройства 13 обнаружения, и, в частности, системы 17 разъединения, с приводом.
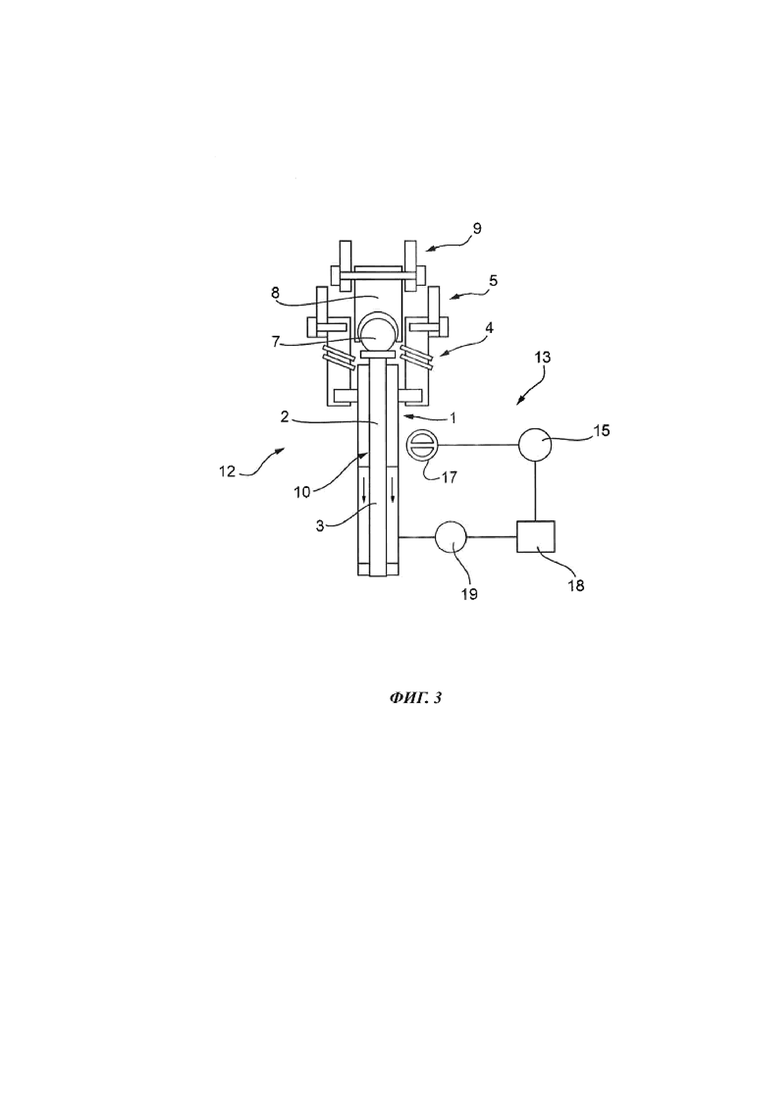
На фиг. 3 показано прерывание основного пути 1 передачи нагрузки и принятие нагрузки вспомогательным путем 10 передачи нагрузки. Прерывание показано в месте главного верхнего фиксатора 4, но оно может возникнуть на каком-либо элементе, участвующем в основном пути 1 передачи нагрузки привода. Перед указанным прерыванием, то есть во время «нормального» режима эксплуатации, датчик 15 связан с винтом 2 и, следовательно, измеряет данные, представляющие угловое положение винта 2. Кроме того, вращением винта 2 управляет пилот посредством команд в полете, которые он передает летательному аппарату. Данные, представляющие угловое положение винта 2, измеряются вторым датчиком 19 положения, который для своей части продолжает измерять данные, представляющие угловое положение винта 2, даже в случае прерывания основного пути 1 передачи нагрузки, поскольку он не связан с винтом 2 через систему 17 разъединения.
В случае прерывания основного пути 1 передачи нагрузки, нагрузку несет вспомогательный путь 10 передачи нагрузки. В данном случае стержень 3 испытывает относительное смещение относительно винта 2, при этом указанное смещение превышает заданную пороговую характеристику прерывания основного пути 1 передачи нагрузки.
Когда это смещение превышает пороговое значение, система 17 разъединения приводит к разрыву связи между винтом 2 и датчиком 15 положения. Следовательно, датчик 15 больше не измеряет данные, представляющие угловое положение винта 2. Затем датчик 15 положения измеряет сигнал, который равен нулю или является постоянным, что обеспечивает обнаружение прерывания основного пути 1 передачи нагрузки и, следовательно, отказа. Второй датчик 19 продолжает измерять данные, представляющие угловое положение винта 2 и изменения указанного положения.
Если вычислительное устройство 18 сравнивает сигнал от второго датчика 19 с сигналом, измеряемым датчиком 15 положения, который был отсоединен от винта 2 с помощью системы 17 разъединения, ясно, что сигналы будут различными, тогда как до возникновения отказа они были равны или по меньшей мере сопоставимы. Вычислительное устройство 18 выполнено с возможностью обнаружения отказа при сравнении данных, измеренных датчиком 15 положения, и данных, измеренных вторым датчиком 19 положения, больших или меньших, чем заданное пороговое значение.
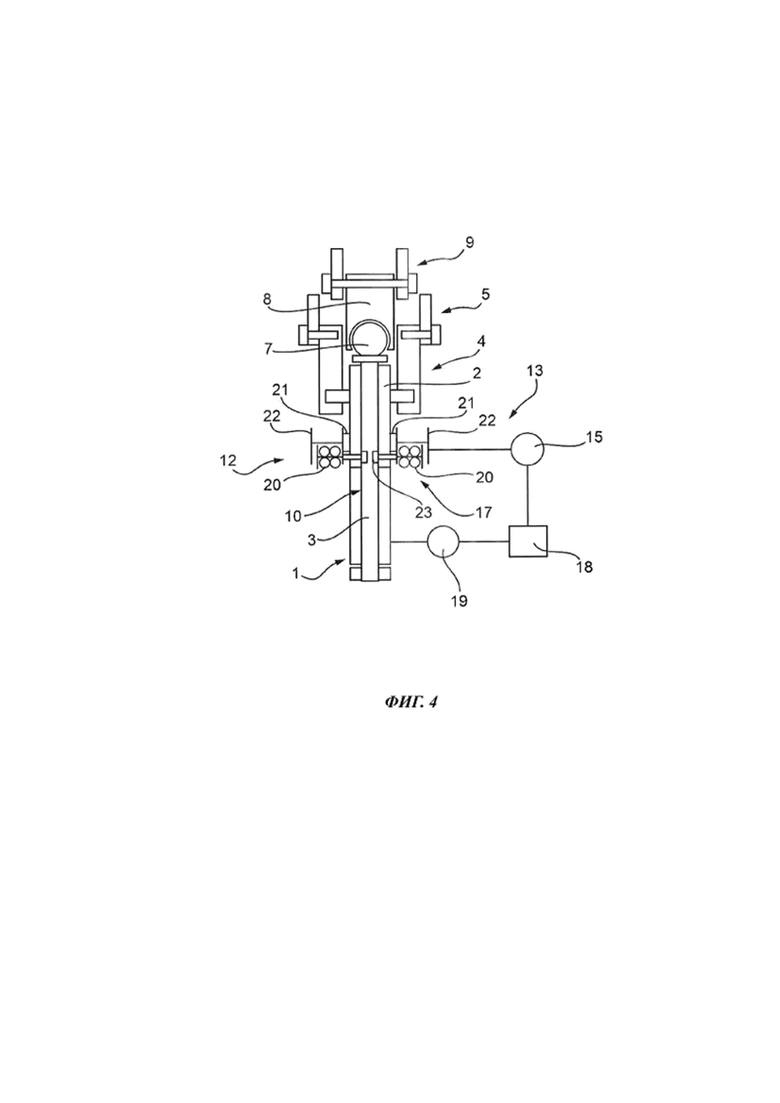
На фиг. 4 более подробно показано устройство 13 обнаружения неисправности основного пути передачи нагрузки. В данном устройстве 13 система 17 разъединения содержит разрушаемый штифт 23, также известный как плавкий штифт. Указанный разрушаемый штифт 23 имеет поперечное сечение, откалиброванное таким образом, что разрушается при заданной нагрузке, соответствующей механической нагрузке, прилагаемой стержнем 3 к винту 2 после прерывания основного пути 1 передачи нагрузки (разрушение винта или другого элемента основного пути 1 передачи нагрузки). Это позволяет системе 17 разъединения работать автоматически после возникновения неисправности основного пути 1 передачи нагрузки с помощью только механических компонентов и без дополнительных датчиков или т. п. Штифт 23 может быть расположен в щелевом отверстии, проходящем через винт 2 и стержень 3, или может ввинчиваться в углубление, проточенное с этой целью. Кроме того, ось указанного разрушаемого штифта 23 подвергается заданной растягивающей нагрузке, что обеспечивает извлечение штифта 23 из винта 2 в случае разрушения указанного штифта 23. Указанная растягивающая нагрузка прилагается штифтами 20, под прямым углом к винту 2. Разрушаемый штифт 23 может соединять винт 2 с зубчатым колесом 22, которое через зубчатую передачу приводит в действие датчик 15 положения, например, датчик углового положения, приводимый во вращение.
В случае прерывания основного пути 1 передачи нагрузки и, как показано на фиг. 5, стержень 3 прилагает механическую нагрузку, превышающую порог разрушения штифта 23, и это приводит к разрушению штифта 23. Под воздействием нагрузки пружины, прилагаемой к штифту 23, он отсоединяется от винта 3. При отсоединении зубчатое колесо 22 становится свободно вращающимся, в частности, благодаря опоре 21. Таким образом, зубчатое колесо 22 больше не следует за вращением винта 2, что означает, что датчик 15 больше не измеряет данные, представляющие угловое положение винта 2, и отсоединяется от указанного винта 2, что позволяет обнаруживать прерывание основного пути 1 передачи нагрузки.
Когда вычислительное устройство 8 сравнивает сигнал, измеряемый датчиком 15 положения, с сигналом, измеряемым вторым датчиком 19 положения, оно обнаруживает отказ, если сравниваемое значение больше (или меньше, в зависимости от случая), чем заданное пороговое значение.
Желательно иметь возможность испытания устройства 13 обнаружения неисправности основного пути передачи нагрузки для гарантии, что оно работает правильно. Очевидно, что устройство 17 разъединения может быть испытано путем нагружения вспомогательного пути передачи нагрузки, но это нежелательно, так как будет влечь за собой значительное вмешательство в летательный аппарат, возможно, путем разъединения основного пути передачи нагрузки, и это может привести к необратимым изменениям некоторых компонентов, например, разрушаемого штифта 23. Таким образом, дополнительный механизм проверки устройства обнаружения обеспечит преимущества, особенно если будет можно проверить устройство обнаружения без необходимости отсоединения основного пути передачи нагрузки или повреждения разрушаемых элементов устройства 13 обнаружения неисправности основного пути передачи нагрузки.
На фиг. 6 и 7 показан пример компоновки для устройства 13 обнаружения неисправности основного пути передачи нагрузки, выполненного с возможностью содержать контрольное устройство. В данном примере работа устройства 13 обнаружения неисправности основного пути передачи нагрузки аналогична работе, описанной выше для фиг. 4 и 5. Винт 2, который проходит вертикально через центр элементов, показанных на фиг. 6, соединен с механическими частями в виде шестерен 32, 34 обратной связи, которые сами соединены с подходящими датчиками положения, например, датчиками RVDT. В нормальном режиме эксплуатации обе из двух шестерен 32, 34 обратной связи вращаются с винтом 2, и, следовательно, они обе обеспечивают одинаковые показания положения винта 2. Первая шестерня 32 обратной связи может быть связана с датчиком 15 положения устройства 13 обнаружения неисправности, а вторая шестерня 34 обратной связи может быть связана со вторым датчиком 19 положения устройства 13 обнаружения неисправности. Как указано выше, при отказе основного пути передачи нагрузки устройство 13 обнаружения неисправности будет отсоединять датчик 15 положения, так что существуют разные данные, обеспечиваемые этим датчиком и вторым датчиком 19 положения. В данном примере этого достигают с помощью двух разрушаемых штифтов 23, которые закреплены симметрично около винта 2 и более подробно описаны ниже.
Контрольное устройство выполнено таким образом, что при задействовании оно приводит к временному разъединению или отсоединению между датчиком 15 положения и винтом 2, тем самым имитируя неисправность основного пути передачи нагрузки. В этом примере временное отсоединение достигается посредством механической системы, которая обеспечивает относительное перемещение первой и второй шестерен 32, 34 обратной связи по сравнению с винтом 2, и относительное перемещение первой шестерни 32 обратной связи по сравнению со второй шестерней 34 обратной связи. Это приводит к различным показаниям от датчика 15 положения и второго датчика 19 положения, а это значит, что неисправность основного пути передачи нагрузки сразу становится очевидной и легко обнаруживается.
Рассматривая пример компоновки разрушаемого штифта 23 более подробно, с конкретной ссылкой на фиг. 7, как показано на поперечном разрезе, разрушаемый штифт 23 в этом примере имеет суженную часть 36, расположенную поперек соединения между стержнем 3 вспомогательного пути передачи нагрузки привода и винтом 2 на основном пути передачи нагрузки. Как указано выше, при отказе основного пути передачи нагрузки будет возникать осевая нагрузка на стержень 3, которая поджимает стержень 3 для смещения в осевом направлении относительно винта 2. Осевая нагрузка, если она превышает определенное пороговое значение, будет разрушать разрушаемый штифт 23 по сужению 36. Сужение 36 тщательно откалибровано так, что оно разрушается при соответствующем пороговом значении, что указывает на неисправность основного пути передачи нагрузки, и так, что оно не разрушается в нормальном режиме эксплуатации, когда отсутствует значительная нагрузка через вспомогательный путь передачи нагрузки, а основной путь передачи нагрузки передает нагрузку на привод.
Как показано на фиг. 6, имеются два разрушаемых штифта 23 на противоположных сторонах винта 2. Один штифт 23 связан с первой шестерней 32 обратной связи, в другой штифт 23 связан со второй шестерней 34 обратной связи. Штифты 23 образуют часть связи между шестернями 32, 34 обратной связи и винтом 2, и обеспечивают связанное перемещение шестерен 32, 34 обратной связи и винта 2 в ходе нормального режима эксплуатации, когда основной путь передачи нагрузки не поврежден.
На фиг. 7 также показана связь между двумя шестернями 32, 34 обратной связи и винтом 2, а также связь между одним из разрушаемых штифтов 23 и первой шестерней 32 обратной связи. В ходе нормального режима эксплуатации, когда разрушаемые штифты 23 не повреждены, обе из двух шестерен 32, 34 обратной связи будут поворачиваться до того же углового положения, в зависимости от положения винта 2. Однако, когда разрушаемые штифты 23 срезаются, две шестерни 32, 34 обратной связи больше не поворачиваются совместно. Вместо этого зубчатая передача 38 в сочетании с опорами, крепящими шестерни 32, 34 обратной связи на вале, действуют так, что вторая шестерня 34 обратной связи и первая шестерня 32 обратной связи больше не поворачиваются с винтом 2 и отсоединены друг от друга. Таким образом, датчики 15, 19, прикрепленные к шестерням 32, 34, могут быть использованы для обеспечения указания неисправности основного пути передачи нагрузки способом, описанным выше, например, с использованием вычислительного устройства 18, поскольку две шестерни 32, 34, очевидно, будут показывать разные положения для винта 2.
Небольшой соединительный стержень 40 подсоединен между разрушаемым штифтом 23 и первой шестерней 32 обратной связи таким образом, что ограничивает относительное вращательное перемещение. Соединительный стержень 40 расположен в отверстии 42 на одной стороне и диагональном щелевом отверстии 44 на другой стороне. Диагональное отверстие 44 является диагональным в том смысле, что проходит как в радиальном направлении, так и в направлении по окружности относительно шестерни 32. В примере, показанном на чертежах, отверстие 42 связано со штифтом 23, а щелевое отверстие 44 выполнено на шестерне 32, хотя, конечно, будет понятно, что может быть использована противоположная компоновка. На фиг. 8 показано диагональное щелевое отверстие на виде в перспективе. Будет понятно, что радиальное перемещение соединительного стержня 40 относительно шестерни 32 будет приводить к вращательному перемещению шестерни 32. В ходе нормальной работы соединительный стержень 40 не перемещается в радиальном направлении, и поэтому шестерни 32, 34 обратной связи движутся совместно. Когда необходимо испытать работу устройства 13 обнаружения неисправности основного пути передачи нагрузки, соединительный стержень 40 перемещается в радиальном направлении, чтобы сдвигать первую шестерню 32 обратной связи относительно второй шестерни 42 обратной связи. В результате вводится рассогласование между измерениями от датчика 15 положения и второго датчика 19 положения. Это значит, что могут быть испытаны как механические, так и электрические аспекты устройства 13 обнаружения неисправности основного пути передачи нагрузки, поскольку во время радиального смещения соединительного стержня 40 и последующего вращательного перемещения первой шестерни 32 обратной связи имитируется неисправность основного пути передачи нагрузки.
В этом примере радиальное перемещение соединительного стержня 40 получают за счет радиального перемещения разрушаемого штифта 23, вызываемого усилием, действующим в направлении, показанном на фиг. 7 стрелкой A. Это усилие толкает разрушаемый штифт 23 внутрь, сжимая пружину 46, а также перемещая соединительный стержень 40 в радиальном направлении внутрь, тем самым поворачивая первую шестерню 32 обратной связи. Будет очевидно, что соединительный стержень 40 удерживается в отверстии 42 на фланце 48, прикрепленном к разрушаемому штифту и перемещаемому вместе с ним по мере сжимания пружины 46. Когда действие усилия в направлении A прекращается, пружина принуждает узел двигаться обратно, в обычное положение, возвращая соединительный стержень 42 в используемое положение и вращая первую шестерню 32 обратной связи обратно до выравнивания со второй шестерней 34 обратной связи.
Таким образом, будет понятно, что, хотя это простая компоновка, и без потребности в каких-либо дополнительных датчиках или сложных компонентах, становится очевидным простое испытание механических и электрических компонентов устройства 13 обнаружения неисправности основного пути передачи нагрузки, путем разрешения временного разъединения, имитирующего поломку основного пути передачи нагрузки.
Следующий пример компоновки для контрольного устройства показан на фиг. 9, на этой фигуре также показано устройство на своем месте с корпусом 49, при этом корпус 49 снабжен наружным приводом 50, который обеспечивает задействование контрольного устройства извне корпуса 48. Будет очевидно, что контрольное устройство по фиг. 9 также содержит дополнительные признаки по сравнению с фиг. 6 и 7, такие как пружина 46 для сжимания, когда разрушаемый штифт 23 прижимается внутрь, устройство по фиг. 9 также имеет фланец 48, прикрепленный к разрушаемому штифту 23 способом, который допускает относительное радиальное перемещение, с помощью дополнительной пружины 52, сжимаемой, когда фланец 48 прижимается внутрь относительно разрушаемого штифта 23. Этот механизм обеспечивает большее радиальное перемещение соединительного стержня 40, так как фланец 48 может перемещаться за пределы интервала перемещения разрушаемого штифта 23. Однако будет понятно, что компоновка по фиг. 7 может заменить компоновку по фиг. 9 и использоваться в аналогичном корпусе 49 с аналогичным внешним приводом 50.
При более подробном рассмотрении внешнего привода 50 будет видно, что он имеет форму подпружиненной кнопки 54, которая проходит через уплотнения в корпусе 49, чтобы прилагать усилие к фланцу 48 и к разрушаемому штифту 23. В примере по фиг. 9, в котором фланец может перемещаться относительно разрушаемого штифта 23, кнопка 54 имеет на конце углубление 56 для приспосабливания к относительному перемещению. Естественно, будет понятно, что углубление 56 может не понадобиться в случае, когда была использована более простая компоновка по фиг. 7.
На фиг. 10 показано испытательное приспособление для использования в испытаниях контрольного устройства. Испытательное приспособление выполнено с возможностью имитации использования контрольного устройства путем задействования механических связей 40, 42, 44 контрольного устройства, которое, в свою очередь, служит для имитации разъединения датчика 15 положения устройства 13 обнаружения неисправности основного пути передачи нагрузки рулевого привода самолета, как указано выше. Испытательное приспособление содержит шток 101 для контакта с поверхностью привода штифта 23 контрольного устройства, которое в данном примере снабжено внешним приводом 50 контрольного устройства. Внешний привод 50 может быть прижат с преодолением сопротивления пружинного возврата для контакта со штифтом 23 контрольного устройства, который затем может быть прижат с преодолением сопротивления пружины 52 возврата для испытаний устройства 13 обнаружения неисправности основного пути передачи нагрузки, как указано выше. Следовательно, шток 101 может быть использован для задействования контрольного устройства во время испытаний с помощью испытательного приспособления.
Для использования испытательного приспособления оно вначале соединяется с корпусом 49 контрольного устройства посредством добавления подходящего резьбового выступа (не показано) на корпусе 49 и с использованием соответствующего резьбового участка на монтажной втулке 102 испытательного устройства. Монтажная втулка 102 связана посредством пружины 103 втулки с внутренней втулкой 104 (направляющая часть штока) испытательного приспособления, при этом пружина 103 втулки проходит между внутренним буртиком монтажной втулки 102 и наружным буртиком внутренней втулки 104. Наружный буртик внутренней втулки 104 также соприкасается с внутренней поверхностью монтажной втулки 102, и внутренняя втулка 104 выполнена с возможностью скольжения относительно монтажной втулки 102, так что, когда монтажная втулка 102 смонтирована на корпусе 49, внутренняя втулка 104 может скользить относительно корпуса 49. Шток 101 проходит через внутреннюю втулку 104 и может скользить во внутренней втулке 104, при этом фланец на штоке 101 находится в контакте со скольжением с внутренней поверхностью внутренней втулки 104. Пружина 105 штока проходит между фланцем штока 101 и внутренним буртиком внутренней втулки. Выскальзыванию штока 101 из внутренней втулки 104 препятствует уплотнительное кольцо на одном конце и внутренний буртик внутренней втулки 104 на другом конце.
Пружина 105 поршня слабее, чем система пружинного возврата для контрольного устройства, так что, когда испытательное приспособление подогнано к корпусу 49, шток 101 может быть введен в контакт с торцевой поверхностью (поверхностью привода) внешнего привода 50 без перемещения привода 50, поскольку пружина 105 штока будет сжиматься без создания усилия, достаточного для перемещения внешнего привода 50 с преодолением сопротивления со стороны его пружины и пружины 52 на штифте 23 контрольного устройства.
Когда испытательное приспособление установлено в корпусе 49 посредством винтовой резьбы монтажной втулки 102, оно регулируется для нагружения пружины 105 штока и для введения внутреннего буртика внутренней втулки 104 в контакт с буртиком штока 101. Это выполняют с использованием регулировочной гайки 106, которая в данном случае является наружной втулкой, имеющей резьбовое соединение с наружной стороной монтажной втулки 102. Регулировочная гайка 106 удерживает испытательную гайку 107, которая установлена с помощью резьбового соединения на регулировочной гайке 106. Испытательная гайка 107 может быть введена в контакт с внутренней втулкой 104, чтобы при этом прилагать нагрузку к пружине 105 штока и сдвигать внутреннюю втулку 104 с преодолением сопротивления пружины 105 штока, чтобы ввести внутренний буртик внутренней втулки 104 в контакт с буртиком штока 101. Как указано выше, в то время как нагрузку несет пружина 105 поршня, движение контрольного устройства не происходит, поскольку пружина 105 штока слабее, чем пружинный возврат контрольного устройства.
Когда регулировочная гайка 106 перемещается в достаточной степени, чтобы вводить испытательную гайку 107 в контакт с внутренней втулкой 104, и внутренняя втулка 104 находится в контакте со штоком 101, тогда метка 108 совмещения на конце штока 101 станет видимой для пользователя. В этот момент расстояние между регулировочной гайкой 106 и испытательной гайкой 107 обеспечивает базовое расстояние для контроля работы контрольного устройства. Базовое расстояние может быть измерено с использованием какого-либо подходящего измерительного устройства, или в некоторых случаях оно может быть считано со шкалы, предусмотренной на регулировочной гайке 106 и испытательной гайке 107. Для испытаний контрольного устройства испытательную гайку 107 затем затягивают и поджимают к внутренней втулке 104, которая сама поджата к штоку 101, чтобы толкать внешний привод 50 контрольного устройства. Пружина 103 втулки сжимается по мере того как шток 101 толкает внешний привод 50, а затем, когда испытательная гайка 107 ослабляется, пружина 103 втулки возвращает испытательное устройство в положение покоя. Нагрузка, прилагаемая к бессенсорному контрольному устройству через внешний привод 50, и максимальное перемещение привода 50 могут быть ограничены путем размещения пружины 103 втулки так, чтобы она была полностью сжата до конца, чтобы прекращать дальнейшее перемещение испытательной гайки 107 при необходимом максимальном перемещении внешнего привода 50. Альтернативно перемещение испытательной гайки 107 может быть ограничено за счет подходящей конструкции испытательной гайки 107, движущей гайки 106 и/или внутренней втулки 104, так что они входят в контакт при необходимом максимальном перемещении внешнего привода 50. Испытательная гайка 107 ввинчивается в регулировочную гайку 106 на полную протяженность ее хода, которая задается так, чтобы отвечать соответствующему расстоянию для ввода в действие контрольного устройства. Затем испытательная гайка 107 отвинчивается до тех пор, пока метка 108 совмещения не выровняется с концом испытательной гайки 107. Это указывает на то, что шток 101 поджат пружиной 105 штока к внешнему приводу 50 без перемещения поверхности 50 привода, это, в свою очередь, указывает, что внешний привод 50 достиг конца перемещения под воздействием пружинного механизма возврата контрольного устройства.
Относительное расстояние между регулировочной гайкой 106 и испытательной гайкой 107 в конечном положении может быть измерено снова, и это измерение может сравниваться с базовым расстоянием. Если существует разница между расстоянием между регулировочной гайкой 106 и испытательной гайкой 107 до и после испытания, это указывает, что контрольное устройство не полностью вернулось в исходное положение, а это означает, что контрольное устройство может работать неправильно. С другой стороны, если разницы нет (или при незначительной разнице) в измерениях, это указывает на то, что механическая связь 40, 42, 44 контрольного устройства работает правильно, и что контрольное устройство правильно отключает и снова включает первую шестерню 32 обратной связи.
Изобретение относится к испытательному приспособлению для испытаний работы контрольного устройства для рулевого привода самолета, такому как испытательное устройство для устройства обнаружения неисправности основного пути передачи нагрузки. Испытательное приспособление для испытания бессенсорного контрольного устройства привода содержит шток для контакта с поверхностью привода, связанной со штифтом контрольного устройства; пружину штока для поджимания штока к поверхности привода; и регулирующий и испытательный механизм. Пружина штока является более слабой, чем упругий механизм возврата контрольного устройства. Бессенсорное контрольное устройство при этом выполнено с возможностью использования путем механического перемещения штифта контрольного устройства из положения покоя в положение срабатывания, а затем высвобождение штифта контрольного устройства для его возвращения в положение покоя под воздействием упругого механизма возврата. 3 н. и 12 з.п. ф-лы, 10 ил.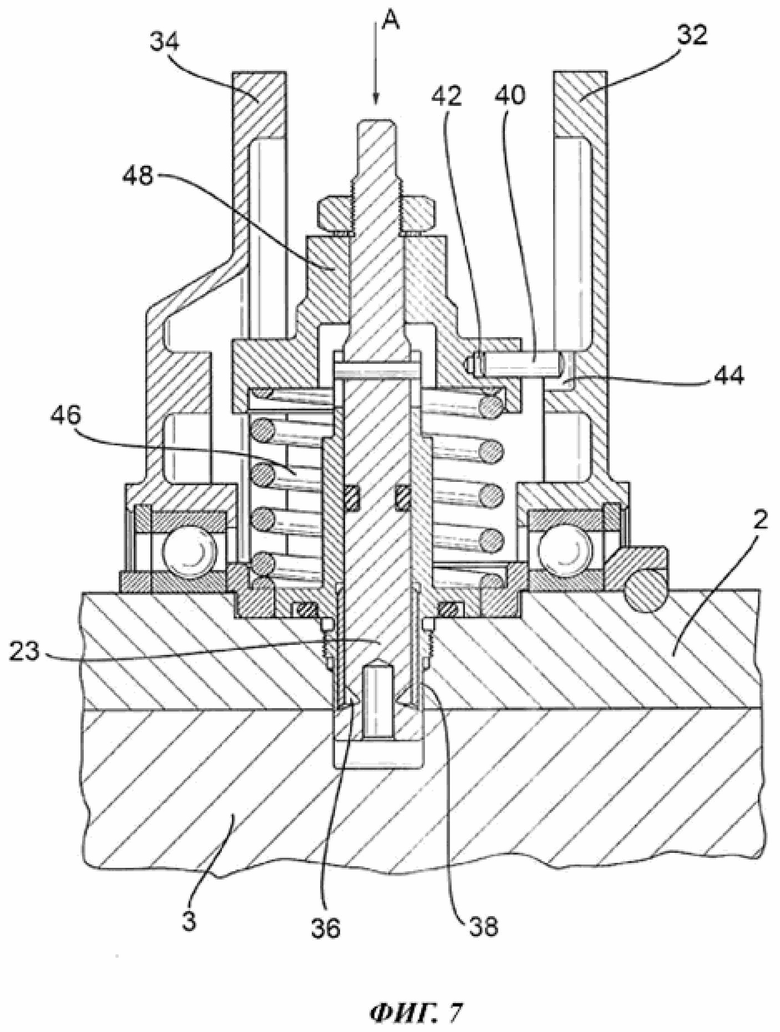
1. Испытательное приспособление для испытания бессенсорного контрольного устройства привода, отличающееся тем, что бессенсорное контрольное устройство выполнено с возможностью использования путем механического перемещения штифта контрольного устройства из положения покоя в положение срабатывания, а затем высвобождение штифта контрольного устройства для его возвращения в положение покоя под воздействием упругого механизма возврата, при этом испытательное приспособление содержит:
шток для контакта с поверхностью привода, связанной со штифтом контрольного устройства;
пружину штока для поджимания штока к поверхности привода, при этом пружина штока является более слабой, чем упругий механизм возврата контрольного устройства; и
регулирующий и испытательный механизм;
при этом регулирующий и испытательный механизм выполнен с возможностью:
сжимания пружины штока и приложения нагрузки через шток к поверхности привода для перемещения поверхности привода таким образом, что обеспечивается возможность регистрации положения штока в начале перемещения поверхности привода, чтобы установить исходное положение,
отпускания штифта контрольного устройства посредством штока и поверхности привода для имитации использования контрольного устройства, обеспечения штифту контрольного устройства возможности возвращаться в исходное положение под воздействием упругого механизма возврата, и
указания на то, что штифт контрольного устройства достиг конечного положения после отпускания, с помощью указания на то, что поверхность привода больше не прилагает усилие к штоку,
так что обеспечивается возможность сравнения конечного положения штифта контрольного устройства с исходным положением.
2. Испытательное приспособление по п. 1, содержащее крепежную часть для крепления испытательного приспособления к корпусу, который обрамляет контрольное устройство, посредством соединительного механизма для надежного крепления испытательного приспособления к корпусу.
3. Испытательное приспособление по п. 1 или 2, в котором регулирующий и испытательный механизм содержит:
регулировочную часть, выполненную с возможностью перемещения относительно других частей испытательного приспособления, чтобы сжимать пружину штока и поджимать шток для обеспечения приложения нагрузки к поверхности привода через шток, и
испытательную часть, выполненную с возможностью перемещения относительно других частей испытательного приспособления, для перемещения штока и приложения нагрузки к поверхности привода через шток, чтобы перемещать штифт контрольного устройства с преодолением сопротивления упругого механизма возврата.
4. Испытательное приспособление по п. 3, в котором исходное положение и конечное положение определяют путем выравнивания испытательной части регулирующего и испытательного механизма с меткой совмещения на штоке и последующего измерения расстояния между испытательной частью и регулировочной частью регулирующего и испытательного механизма.
5. Испытательное приспособление по п. 3 или 4, в котором регулировочная часть регулирующего и испытательного механизма прикреплена с возможностью перемещения к крепежной части, а испытательная часть регулирующего и испытательного механизма прикреплена с возможностью перемещения к регулировочной части.
6. Испытательное приспособление по п. 5, в котором крепление с возможностью перемещения содержит винтовую резьбу.
7. Испытательное приспособление по п. 6, в котором испытательная гайка выполнена с возможностью завинчивания и отвинчивания, чтобы опускать штифт контрольного устройства посредством штока и поверхности привода, а затем позволять штоку контрольного устройства возвращаться в исходное положение под воздействием упругого механизма возврата.
8. Испытательное приспособление по любому из предшествующих пунктов, содержащее направляющую часть штока, служащую для удерживания штока, направления перемещения штока и удерживания пружины штока, так что обеспечена возможность сжатия пружины штока между штоком и направляющей частью штока.
9. Испытательное приспособление по п. 8, в котором направляющая часть штока имеет форму внутренней втулки, которая расположена по окружности штока и плотно прилегает к штоку, чтобы направлять перемещение со скольжением штока во внутренней втулке, при этом направляющая часть штока содержит буртик для взаимодействия со штоком и толкания штока, и при этом регулирующий и испытательный механизм выполнен с возможностью вхождения в контакт с направляющей частью штока, чтобы толкать буртик направляющей части штока для вхождения во взаимодействие со штоком, чтобы перемещать шток и, тем самым, перемещать штифт контрольного устройства.
10. Испытательное приспособление по п. 9, в котором регулирующий и испытательный механизм содержит регулировочную часть и испытательную часть, и при этом испытательная часть введена в контакт с направляющей частью штока, чтобы прижимать буртик направляющей части штока с обеспечением его взаимодействия со штоком путем перемещения регулировочной части для перемещения испытательной части относительно крепежной части.
11. Испытательное приспособление по любому из предшествующих пунктов, в котором испытательное приспособление содержит:
монтажную часть в виде монтажной втулки с соединительным механизмом для надежного крепления испытательного приспособления к корпусу;
внутреннюю втулку, удерживаемую для перемещения со скольжением относительно монтажной втулки, при этом внутренняя втулка удерживает и направляет перемещение штока, удерживает пружину штока, так что обеспечивается возможность сжатия пружины штока между штоком и внутренней втулкой, и содержит буртик для взаимодействия со штоком и его толкания;
регулировочную часть в виде регулировочной гайки, прикрепленной с возможностью перемещения к монтажной втулке, и
испытательную часть в виде испытательной гайки, прикрепленной с возможностью перемещения к регулировочной гайке;
при этом перемещение регулировочной гайки приведет к введению испытательной гайки в контакт с внутренней втулкой для нагружения пружины штока и введения буртика внутренней втулки во взаимодействие со штоком;
причем последующее перемещение испытательной гайки приведет к перемещению штока и, тем самым, к перемещению поверхности привода, чтобы обеспечить отпускание штифта контрольного устройства, и
при этом шток снабжен меткой совмещения для выравнивания с испытательной гайкой для определения исходного положения и конечного положения.
12. Система для проверки рулевого привода самолета, отличающаяся тем, что рулевой привод самолета содержит бессенсорное контрольное устройство, при этом система содержит бессенсорное контрольное устройство и испытательное приспособление по любому из предшествующих пунктов и при этом бессенсорное контрольное устройство представляет собой контрольное устройство для устройства обнаружения неисправности основного пути передачи нагрузки рулевого привода самолета такого типа, которое отсоединяет датчик положения от основного пути передачи нагрузки в случае неисправности основного пути передачи нагрузки, при этом контрольное устройство содержит: механическую связь для имитации разъединения датчика положения за счет допущения относительного перемещения по меньшей мере первой и второй механических частей привода, которые не могут перемещаться относительно друг друга в нормальном режиме эксплуатации при отсутствии неисправности основного пути передачи нагрузки, при этом первая и вторая механические части содержат первую механическую часть с перемещением, обнаруживаемым датчиком положения устройства обнаружения неисправности основного пути передачи нагрузки.
13. Система по п. 12, в которой механические части представляют собой шестерни, соединенные с винтом в основном пути передачи нагрузки привода, при этом шестерни выполнены таким образом, что в нормальном режиме эксплуатации они вращаются совместно, а механическая связь контрольного устройства выполнена таким образом, что, будучи приведенной в действие, она перемещает одну из шестерен относительно другой.
14. Способ испытания работы бессенсорного контрольного устройства для устройства обнаружения неисправности основного пути передачи нагрузки, отличающийся тем, что бессенсорное контрольное устройство имеет поверхность привода, связанную со штифтом контрольного устройства, и упругий механизм возврата для возвращения поверхности привода и штифта контрольного устройства в исходное положение после использования, при этом способ включает:
приведение штока испытательного приспособления в контакт с поверхностью привода, связанной со штифтом контрольного устройства, при этом пружина штока испытательного приспособления поджимает шток к поверхности привода и при этом пружина штока является более слабой, чем упругий механизм возврата контрольного устройства;
сжимание пружины штока до тех пор, пока не будет обеспечена возможность приложения нагрузки через шток к поверхности привода для перемещения поверхности привода; регистрацию положения штока в начале перемещения поверхности привода для установления исходного положения;
отпускание штифта контрольного устройства с использованием испытательного приспособления для имитации использования контрольного устройства;
высвобождение штифта контрольного устройства и обеспечение его возврата в исходное положение под воздействием упругого механизма возврата;
определение того, что штифт контрольного устройства достиг конечного положения, путем определения того, что поверхность привода больше не прилагает усилие к штоку, и
сравнение конечного положения штифта контрольного устройства с исходным положением для гарантии того, что штифт контрольного устройства возвращается в исходное положение.
15. Способ по п. 14, включающий использование испытательного приспособления или системы по любому из пп. 1-13.
| US 3715548 A, 06.02.1973 | |||
| EP 3081481 A1, 19.10.2016 | |||
| Аксиально-поршневой насос переменной производительности | 1960 |
|
SU142487A1 |

