(Л
С
Изобретение может использоваться в автоматических системах управления торможением колесных транспортных средств. Сущность изобретения: при торможении измеряют окружные скорости Vrad колеса, а тормозное давление модулируют в зависимости от замедления или пробуксовки колеса, которые превышают пороговые значения. При этом для каждого заторможенного колеса определяют разницу A ref между базисной скоростью VrefF транспортного средства и базисной скоростью VrefR колеса для регулирования длительности периода поддержания давления или фазы снижения давления -в зависимости от упомянутой разницы Д ref, 2 ил.
Изобретение относится к способам регулирования тормозного давления в системах торможения транспортного средства, исключающим блокировку колес.
Цель изобретения - повышение эффективности процесса торможения.
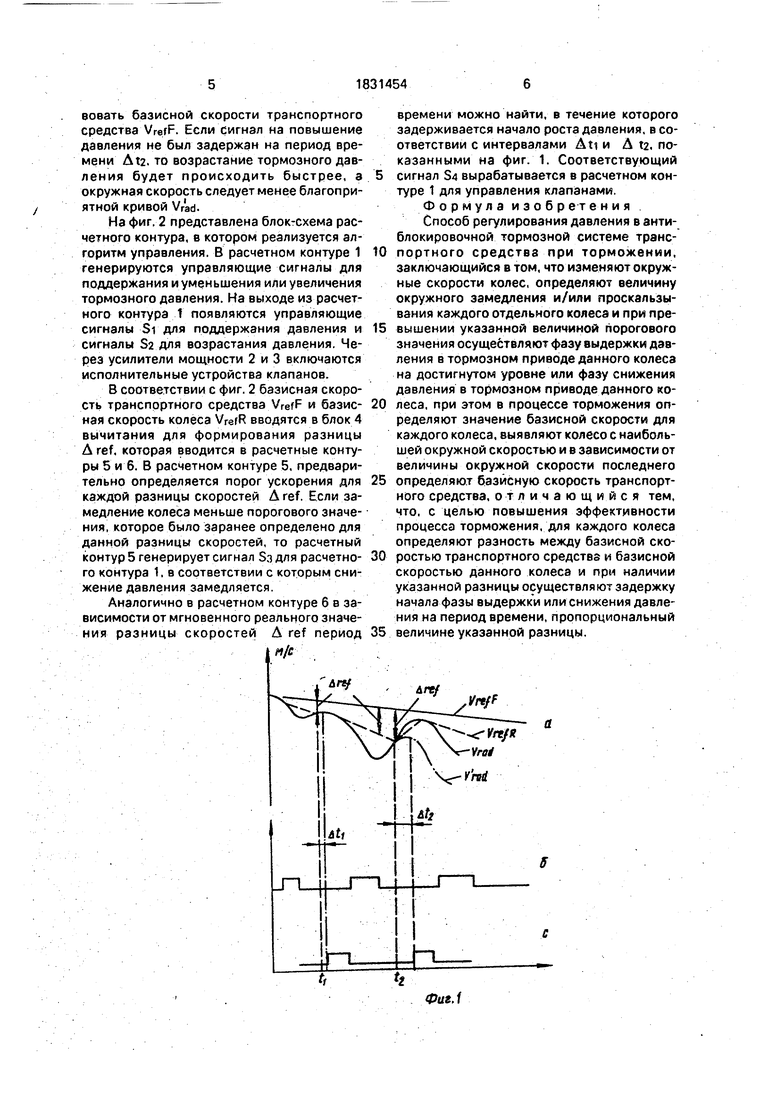
: На фиг. 1 представлена зависимость от времени t характерных скоростей антиблокировочного регулирования, в частности, представлены сигналы на снижение давления и его повышение, которые передаются на управляющие клапаны подачи или сброса давления для торможения; на фиг. 2 - блок-схема системы управления тормозом по настоящему изобретению..
Кроме того, на фиг. 1а представлено изменение во времени базисной скорости транспортного средства VrefF- Базисная
скорость транспортного средства VrefF определяется скоростью вращения самого быстрого колеса (или скоростью вращения- самого быстрого колеса или группы колес, например, диагонально расположенных колес).
Кроме этого на фиг. 1 а сплошной линией показана окружная скорость Vrad индивидуально заторможенного колеса для типичной кривой управления торможением, согласно настоящему изобретению, а штрихпунктир- ной линией показана скорость вращения колеса для обычной системы регулирования, которая обозначена Vrad.
Помимо этого на фиг. 1а показана базисная скорость VrefR отдельного колеса (штриховая линия). Базисная скорость VrefR
00 CJ
Ј 01
Јь
СО
колеса получена по существу обычным способом.
Базисную скорость колеса можно определить следующим образом: сигналы скорости (сигналы от датчиков) колеса измеряются (считаются) и в цифровом виде запоминаются как мгновенные значения скорости колеса. Определенное таким образом мгновенное значение скорости колеса сравнивается с предыдущим изменением и находящимся в памяти значением. Также известно, что можно для формирования базисной скорости колеса добавлять множество последовательно измеренных значений скорости колеса для определения из этого среднего значения скорости колеса и введения этого значения скорости в память.
Теперь, если последнее значение мгновенной скорости колеса не отличается от предыдущего значения на величину больше AV от находящегося в памяти значения скорости колеса, причем этот процесс сравнения происходит непрерывно, то последнее измеренное значение мгновенной скорости колеса снова вводится в память и принимается в расчет при определении, описанном выше. Таким образом полученная величина представляет собой базисную скорость колеса,
Если, однако, мгновенное последнее значение скорости колеса отличается более, чем на заданную величину AV от величины, находящейся в памяти, то из этого делается вывод о том, что соответствующее колесо стало нестабильным, а давление снижается или поддерживается постоянным.
Если нестабильность колеса зафиксирована таким способом, то после этого скорость колеса, которая была измерена, больше не используется для формирования базисной скорости, поскольку базовая скорость колеса соответствует насколько это возможно действительной скорости транспортного средства. По этой причине базовая скорость колеса теперь воспроизводится вероятными данными. Например, при определении нестабильности колеса на основе превышения пороговых значений {AV) базовая скорость колеса снижается с градиентом 0,6 д. Эту заданную величину градиента можно менять в физически возможных пределах (обычно между 1,1 и 0,1 д). Например, при сильном угловом замедлении в начальной фазе торможения (первый цикл управлений) можно сделать вывод о том, что дорожная поверхность скользкая, и поэтому заранее определенный градиент 0.6 g уменьшен, например, на 0,3 д, и, таким образом, для базисной скорости колеса получается градиент 0,3 д.
С другой стороны, если при первоначальной фазе торможения (первый цикл управления) измерена малая величина углового замедления, то следует вывод о том, что имеет место хорошее дорожное покрытие, а градиент увеличивается добавлением 0,5 g к величине 0,6 д, при этом
получается градиент 1,1 g для базисной скорости.
Кроме этого, для формирования базисной скорости также известен прием, связанный с расчетом после первого цикла
управления, исходя их средних значений угловых замедлений колеса, замедления транспортного средства, при этом градиент может бытъ скорректирован аналогичным образом.
Также можно управлять градиентами для симулированной базисной скорости колеса с помощью внешнего средства. Под внешним средством здесь понимается устройство, которое независимо измеряет скорости вращения колес. Например, с помощью масс пружинной системы можно вычислять замедление транспортного средства (инертная масса сжимает пружину в соответствии с замедлением транспортного
средства). Таким образом полученный сигнал о величине замедления может также воздействовать на базисную скорость транспортного средства.
На фиг. 16 и 1в представлены сигналы
на уменьшение давления соответствующим клапаном сброса давления с целью снижения тормозного давления соответствующего колеса, а также сигнал на повышение давления для открытия клапана повышения
давления с целью подачи тормозного давления.
В соответствии с рис. 1а в некоторый момент образуется разница Aref между мгновенной базисной скоростью колеса
VrefR и базисной скоростью транспортного средства VrefF, В момент ti разница Aref относительно невелика. Временной интервал Ati,B течение которого возрастание давления в течение фазы поддерживания
давления или фазы его снижения замедляется, оказывается относительно коротким. В момент ta разница A ref оказывается относительно большой.
Соответственно временной интервал
A tz . в течение которого сигнал на повышение давления (рис. 1 в) задерживается, оказывается относительно большим. После этого окружная скорость Vrad заторможенного колеса может в лучшей степени соответствовать базисной скорости транспортного средства VrefF. Если сигнал на повышение давления не был задержан на период времени At2. то возрастание тормозного давления будет происходить быстрее, з окружная скорость следует менее благоприятной кривой Vrad.
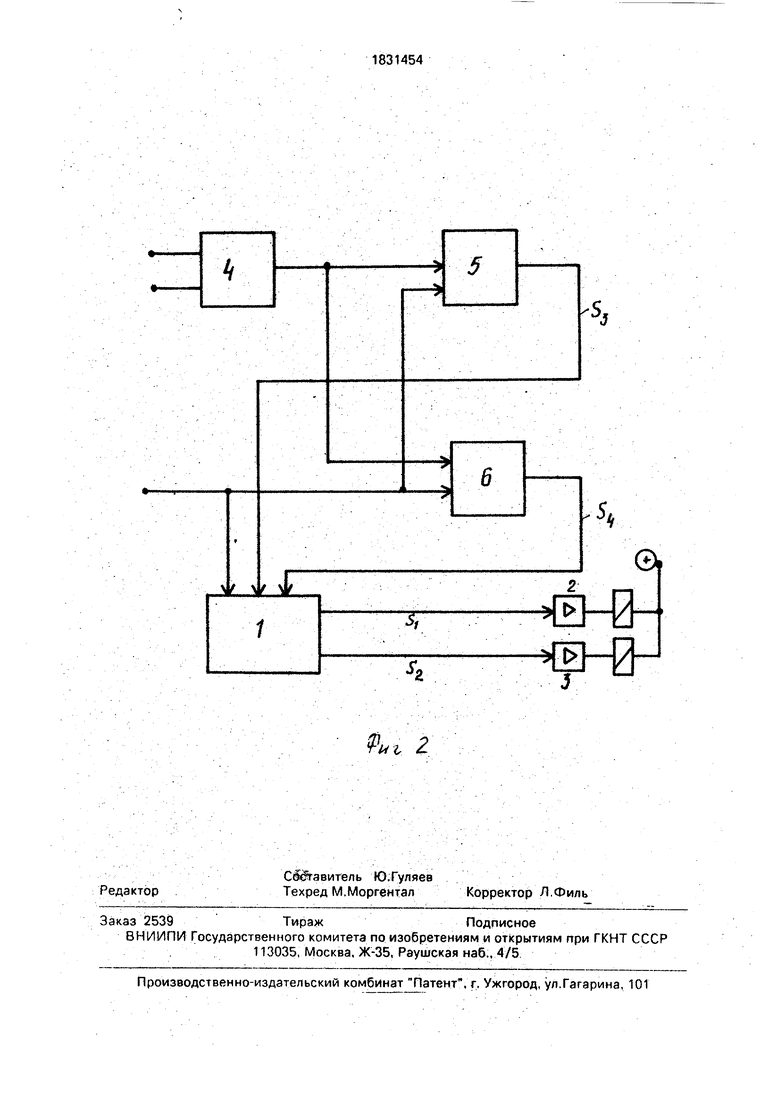
На фиг. 2 представлена блок-схема расчетного контура, в котором реализуется алгоритм управления. В расчетном контуре 1 генерируются управляющие сигналы для поддержания и уменьшения или увеличения тормозного давления. На выходе из расчетного контура Л появляются управляющие сигналы Si для поддержания давления и сигналы Sa для возрастания давления. Через усилители мощности 2 и 3 включаются исполнительные устройства клапанов.
В соответствии с фиг. 2 базисная скорость транспортного средства VrefF и базис- ная скорость колеса VrefR вводятся в блок 4 вычитания для формирования разницы A ref, которая вводится в расчетные контуры 5 и 6. В расчетном контуре 5, предварительно определяется порог ускорения для каждой разницы скоростей Д ref. Если замедление колеса меньше порогового значения, которое было заранее определено для данной разницы скоростей, то расчетный контур 5 генерирует сигнал 5з для расчетно- го контура 1, в соответствии с которым снижение давления замедляется.
Аналогично в расчетном контуре 6 в зависимости от мгновенного реального значения разницы скоростей A ref период
а/с
времени можно найти, в течение которого задерживается начало роста давления, в соответствии с интервалами Ati и Д тз, показанными на фиг. 1. Соответствующий сигнал $4 вырабатывается в расчетном контуре 1 для управления клапанами. Формула изобретения Способ регулирования давления в антиблокировочной тормозной системе транспортного средства при торможении, заключающийся в том, что изменяют окружные скорости колес, определяют величину окружного замедления и/или проскальзывания каждого отдельного колеса и при превышении указанной величиной порогового значения осуществляют фазу выдержки давления в тормозном приводе данного колеса на достигнутом уровне или фазу снижения давления в тормозном приводе данного колеса, при этом в процессе торможения определяют значение базисной скорости для каждого колеса, выявляют колесо с наибольшей окружной скоростью и в зависимости от величины окружной скорости последнего определяют базисную скорость транспортного средства, от л и ч а ю щ и и с я тем, что, с целью повышения эффективности процесса торможения, для каждого колеса определяют разность между базисной скоростью транспортного средстве и базисной скоростью данного колеса и при наличии указанной разницы осуществляют задержку начала фазы выдержки или снижения давления на период времени, пропорциональный величине указанной разницы.
&ref
Ifre/F
Vrai
Фиг 2
| Патент ФРГ № 2951754, кл | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
