Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления муфтой для гибридного транспортного средства.
Документы предшествующего уровня техники
[0002] Традиционно известно гибридное транспортное средство, содержащее первую муфту для прерывания передачи крутящего момента между двигателем и электромотором-генератором и вторую муфту для прерывания передачи крутящего момента между электромотором-генератором и ведущим колесом.
Патентный документ 1 раскрывает технологию для предотвращения превышения посредством крутящего момента электромотора верхнего предельного крутящего момента посредством выделения перегрузочной способности по крутящему моменту первой муфты, которая представляет собой крутящий момент проворачивания, и перегрузочной способности по крутящему моменту второй муфты, которая представляет собой крутящий момент приведения в движение транспортного средства, в пределах диапазона верхнего предельного крутящего момента электромотора, когда двигатель запускается посредством соединения первой муфты после того, как водитель нажимает акселератор. В это время, ускорение транспортного средства через ранний запуск двигателя достигается посредством увеличения выделения перегрузочной способности по крутящему моменту первой муфты по мере того, как возрастает скорость нажатия педали акселератора водителя.
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. Выложенная заявка на патент Японии № 2009-227277
Сущность изобретения
Задачи, решаемые изобретением
[0004] В традиционной технологии, описанной выше, даже когда величина открытия позиции педали акселератора является небольшой, если скорость нажатия педали акселератора является высокой, увеличивается выделение перегрузочной способности по крутящему моменту первой муфты; как результат, возникает такая проблема, что ускорение является инертным, и что рабочие характеристики ускорения, которые требуются водителем, не могут получаться сразу после нажатия до тех пор, пока не будет завершен запуск двигателя.
Цель настоящего изобретения заключается в том, чтобы предоставлять устройство управления муфтой для гибридного транспортного средства, которое может реализовывать рабочие характеристики ускорения, которые требуются водителем.
Средство, используемое для того, решать задачи
[0005] В настоящем изобретении, при запуске двигателя после нажатия акселератора, выделение значения команды управления перегрузочной способностью по передаточному крутящему моменту второй муфты увеличивается, если величина открытия позиции педали акселератора равна или меньше предварительно определенной величины открытия позиции педали акселератора, по сравнению с тем, когда превышение предварительно определенной величины открытия позиции педали акселератора.
Преимущества изобретения
[0006] Следовательно, когда требуемое ускорение водителя является небольшим, крутящий момент приведения в движение, который совпадает с требуемым ускорением, может формироваться сразу после нажатия посредством приоритезации увеличения крутящего момента приведения в движение над сокращением времени запуска двигателя, и могут быть реализованы рабочие характеристики ускорения, которые требуются водителем.
Краткое описание чертежей
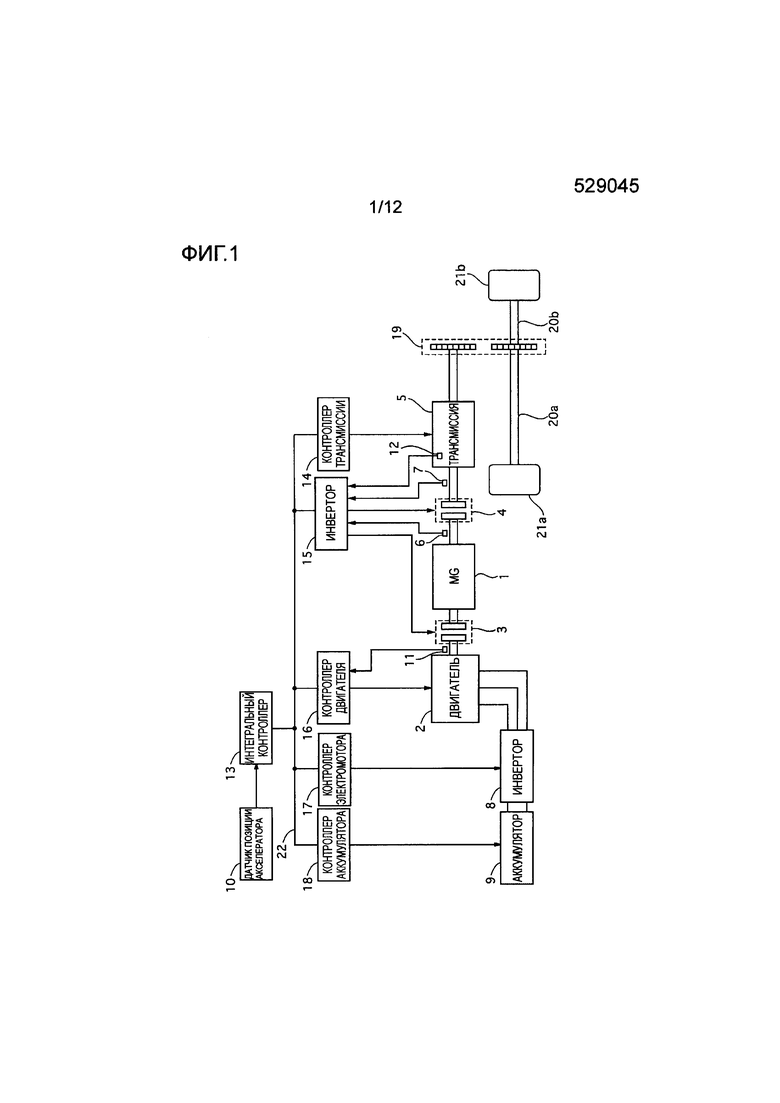
[0007] Фиг.1 является системным видом гибридного транспортного средства, к которому применяется устройство управления муфтой первого варианта осуществления.
Фиг.2 является блок-схемой последовательности операций способа, иллюстрирующей контент обработки интегрального контроллера 13.
Фиг.3 является картой вычисления команды крутящего момента приведения в движение, согласно скорости транспортного средства и величине открытия позиции педали акселератора.
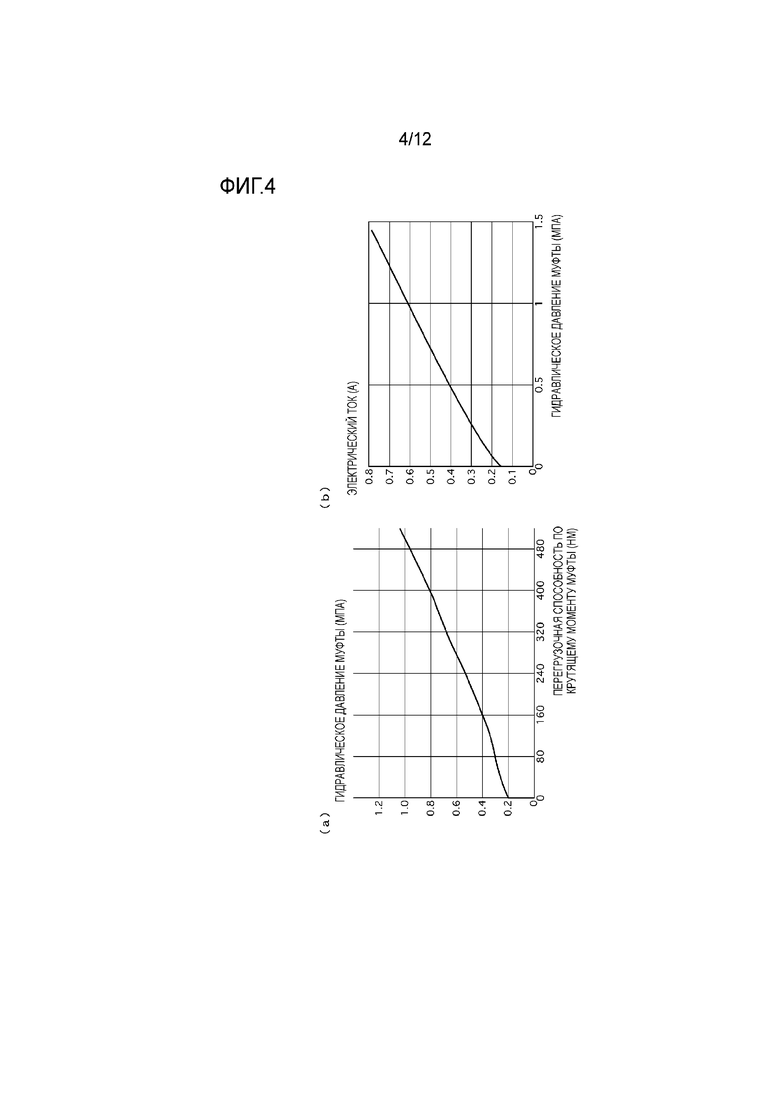
Фиг.4(a) показывает перегрузочную способность по крутящему моменту муфты, через карту преобразования гидравлического давления муфты, и (b) показывает гидравлическое давление муфты, через карту преобразования тока.
Фиг.5 является блок-схемой последовательности операций, иллюстрирующей способ для задания режима управления второй муфтой.
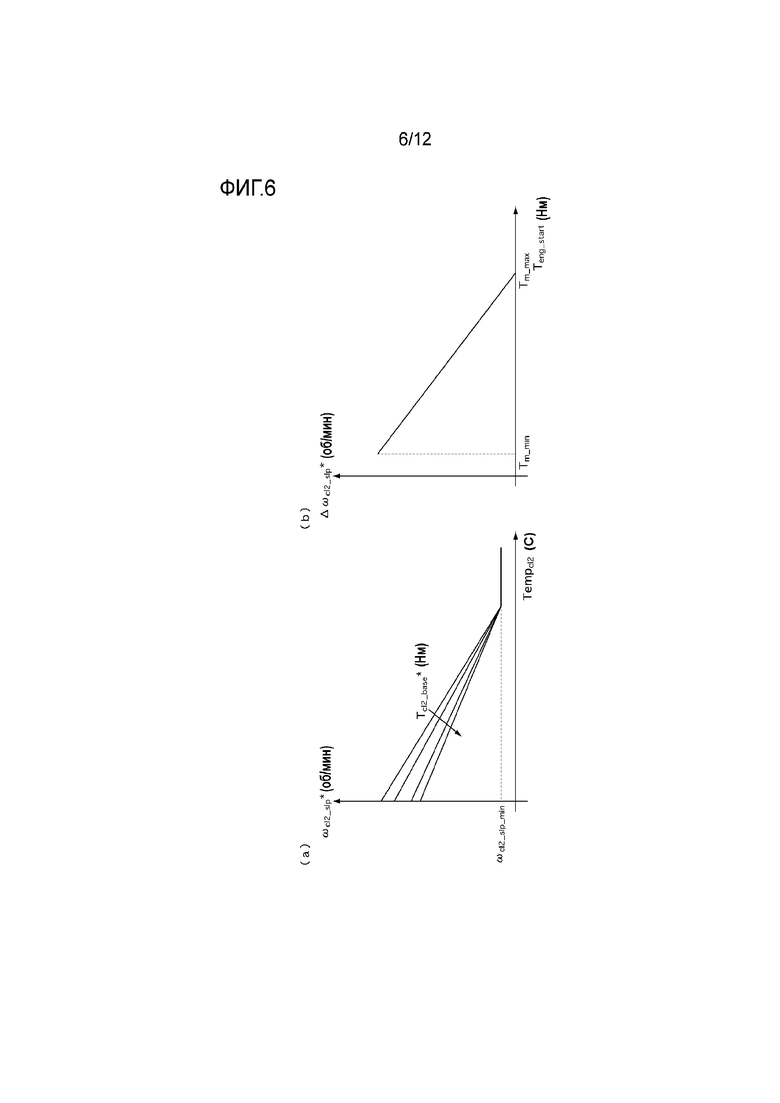
Фиг.6(a) показывает карту вычисления целевых значений частоты вращения при проскальзывании второй муфты на основе базового значения команды управления перегрузочной способностью по крутящему моменту второй муфты и температуры масла второй муфты, а (b) показывает карту вычисления целевых значений частоты вращения при проскальзывании второй муфты на основе выделяемого крутящего момента электромотора для запуска двигателя.
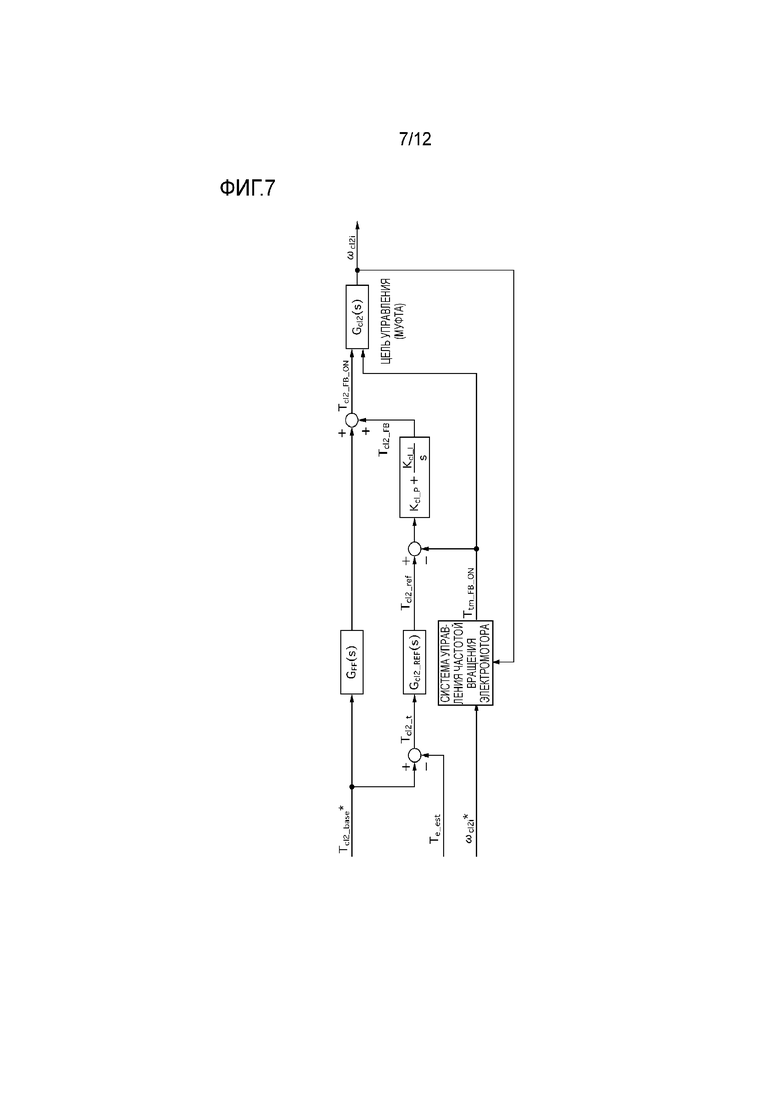
Фиг.7 является блок-схемой управления с обратной связью для второй муфты.
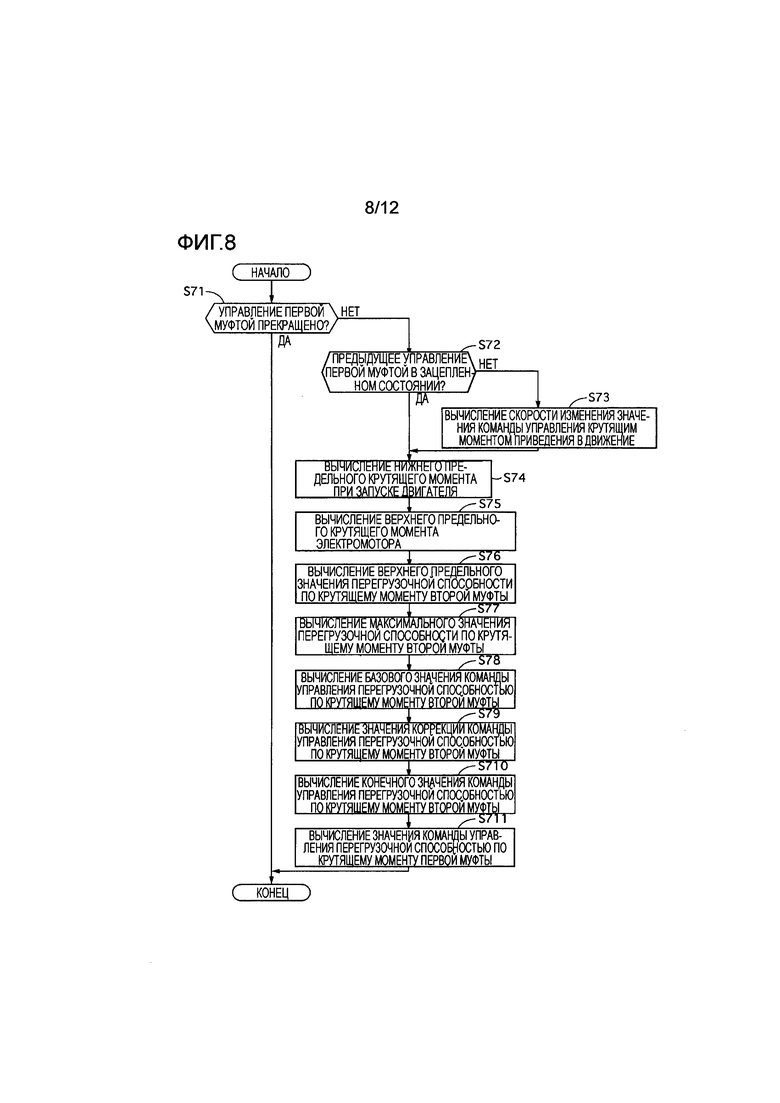
Фиг.8 является блок-схемой последовательности операций, иллюстрирующей способ вычисления значений команд управления перегрузочной способностью по крутящему моменту для каждой муфты при запуске двигателя.
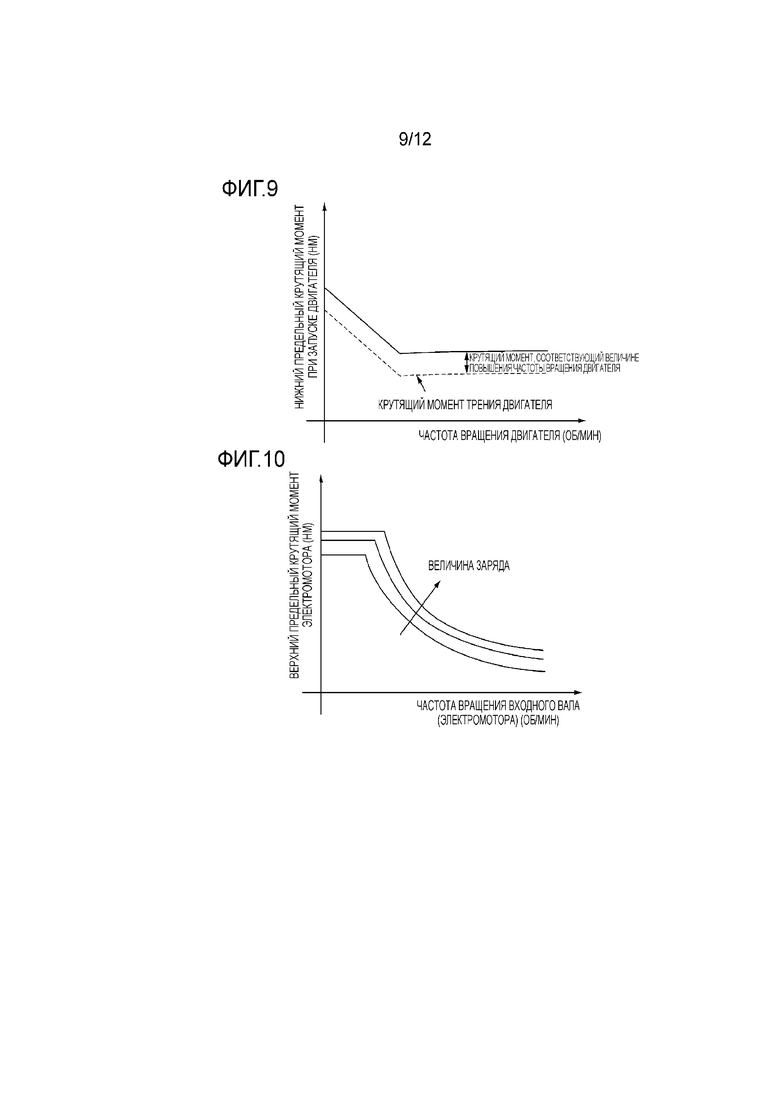
Фиг.9 является картой вычисления нижнего предельного крутящего момента при запуске двигателя.
Фиг.10 является картой вычисления верхнего предельного крутящего момента электромотора.
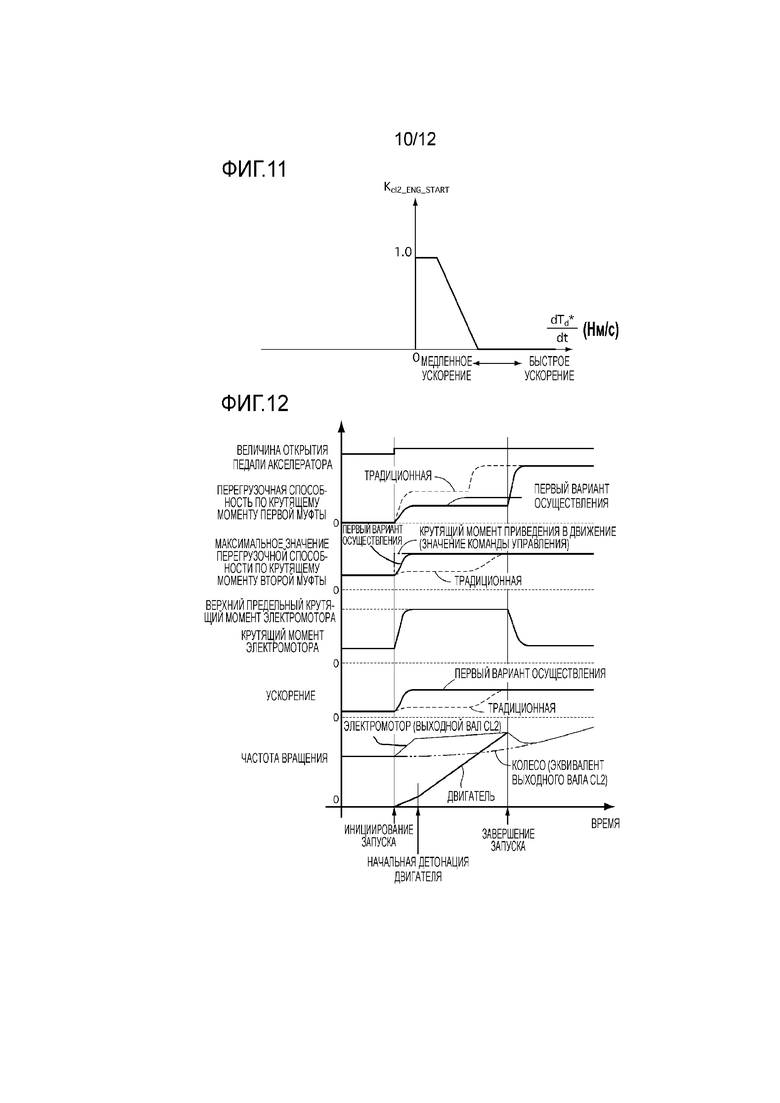
Фиг.11 является характерным видом значения коррекции команды управления перегрузочной способностью по крутящему моменту второй муфты, соответствующего скорости изменения значения команды управления крутящим моментом приведения в движение.
Фиг.12 является временной диаграммой, показывающей то, когда двигатель запускается посредством резкой операции с акселератором в ходе EV-движения, а также при движении, в то время как величина нажатия имеет низкую величину открытия (резкое ускорение).
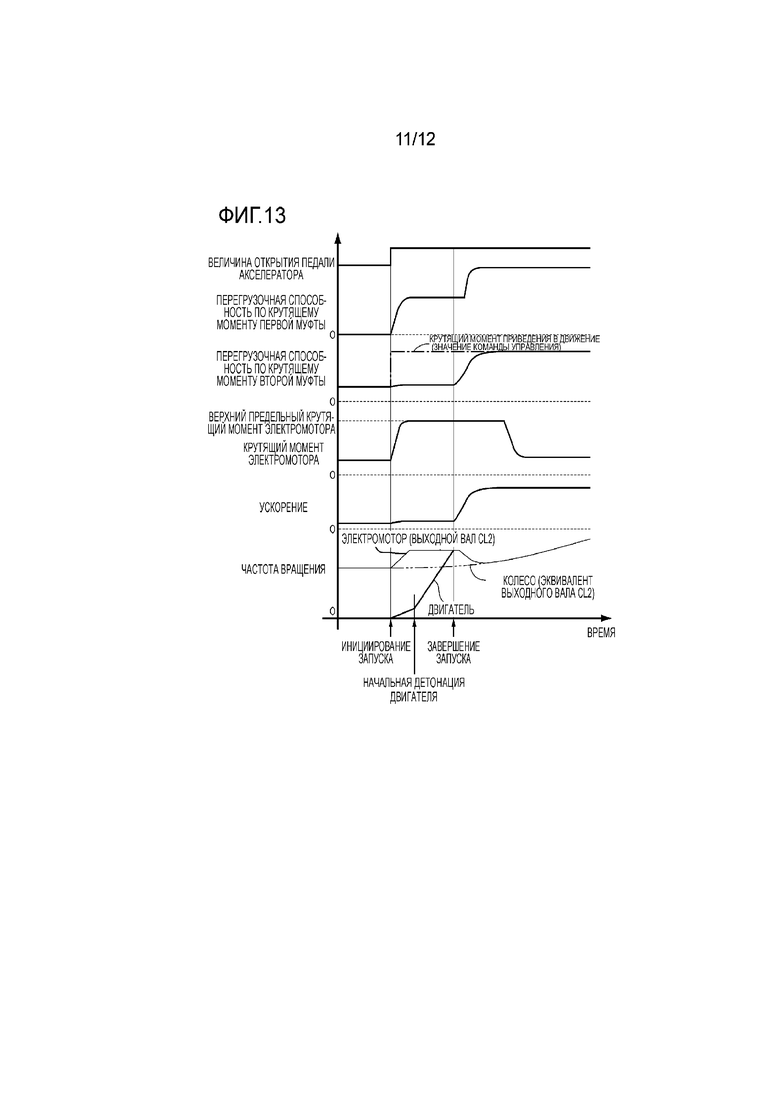
Фиг.13 является временной диаграммой, показывающей то, когда двигатель запускается посредством резкой операции с акселератором в ходе EV-движения, а также при движении, в то время как величина нажатия имеет высокую величину открытия.
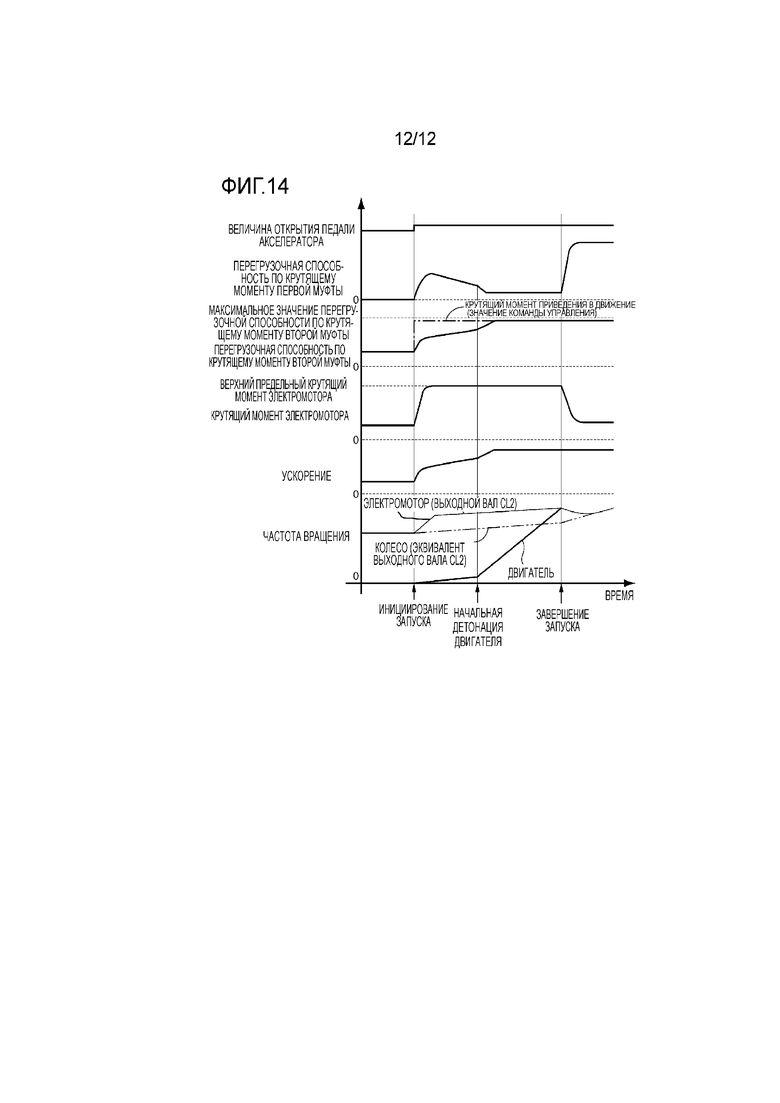
Фиг.14 является временной диаграммой, показывающей то, когда двигатель запускается посредством резкой операции с акселератором в ходе EV-движения, а также при движении, в то время как величина нажатия имеет среднюю величину открытия.
Список ссылочных позиций
[0008] 1 - электромотор-генератор
2 - двигатель
3 - первая муфта
4 - вторая муфта
5 - трансмиссия
6 - датчик частоты вращения входного вала второй муфты
7 - датчик частоты вращения выходного вала второй муфты
9 - аккумулятор высокого напряжения
10 - датчик позиции акселератора
11 - датчик частоты вращения двигателя
12 - датчик температуры масла муфты
13 - интегральный контроллер
14 - контроллер трансмиссии
15 - контроллер муфты
16 - контроллер двигателя
17 - контроллер электромотора
18 - контроллер аккумулятора
19 - главная шестерня
20a, 20b - левый и правый ведущие валы
21a, 21b - левое и правое ведущие колеса
22 - линия связи
Предпочтительные варианты осуществления изобретения
[0009] Первый вариант осуществления
Общая система
Фиг.1 является системным видом гибридного транспортного средства, к которому применяется устройство управления муфтой первого варианта осуществления.
Электромотор-генератор 1 (в дальнейшем называемый "электромотором") представляет собой синхронный электромотор переменного тока, выполненный с возможностью приводить в движение левое и правое ведущие колеса 21a, 21b через управление крутящим моментом приведения в движение и восстанавливать кинетическую энергию транспортного средства для аккумулятора 9 высокого напряжения через управление рекуперативным торможением.
Двигатель 2 допускает сгорание бедной смеси, и крутящий момент двигателя управляется таким образом, чтобы согласовываться со значением команды управления, посредством управления объемом всасываемого воздуха через актуатор дросселя, объемом впрыска топлива через инжектор и распределением зажигания через свечу зажигания.
Первая муфта 3 представляет собой сухую муфту, которая выполняет зацепление/расцепление между двигателем 2 и электромотором 1. Когда первая муфта 3 находится в состоянии полного зацепления, "крутящий момент электромотора + крутящий момент двигателя" передается во вторую муфту 4; когда в расцепленном состоянии, только крутящий момент электромотора передается во вторую муфту 4.
Вторая муфта 4 представляет собой мокрую муфту, в которой передаточный крутящий момент (перегрузочная способность по крутящему моменту муфты) формируется в соответствии с гидравлическим давлением муфты (прижимающей силой). Передаточный крутящий момент второй муфты 4 передает крутящий момент, который выводится из электромотора 1 и двигателя 2 (когда первая муфта зацепляется), на левый и правый ведущие валы 20a, 20b через трансмиссию 5 и главную шестерню 19.
[0010] Трансмиссия 5 представляет собой ступенчатую трансмиссию, сконфигурированную из множества шестерен планетарной передачи. Переключение передач выполняется посредством изменения тракта передачи силы посредством зацепления/расцепления каждого из тормоза и муфты внутри трансмиссии.
Датчик 6 частоты вращения входного вала (электромотора) второй муфты определяет текущую частоту вращения входного вала второй муфты 4.
Датчик 7 частоты вращения выходного вала второй муфты определяет текущую частоту вращения выходного вала второй муфты 4.
Инвертор 8 высокого напряжения (в дальнейшем называемый "инвертором") формирует ток приведения в действие электромотора 1 посредством выполнения преобразования постоянного тока в переменный.
Аккумулятор 9 высокого напряжения (в дальнейшем называемый "аккумулятором") накапливает рекуперативную энергию из электромотора 1.
Датчик 10 позиции акселератора определяет величину открытия позиции педали акселератора.
Датчик 11 частоты вращения двигателя определяет текущую частоту вращения двигателя.
Датчик 12 температуры масла муфты определяет температуру масла второй муфты 4.
[0011] Интегральный контроллер 13 вычисляет значение команды управления крутящим моментом приведения в движение на основе состояния аккумулятора, величины открытия позиции педали акселератора и скорости транспортного средства (значение, которое является синхронным с частотой вращения выходного передаточного вала). На основе результатов, значение команды управления для каждого актуатора (электромотора 1, двигателя 2, первой муфты 3 и второй муфты 4) вычисляется и передается в каждый из контроллеров 14-17. Интегральный контроллер 13 запускает двигатель 2 посредством использования крутящего момента электромотора-генератора 1 (средство запуска двигателя), при переключении из режима EV (электромобиля) для отключения первой муфты 3 и движения с помощью крутящего момента электромотора-генератора 1, на HEV (гибридный режим) для соединения первой муфты 3 и движения с помощью крутящего момента двигателя 2 и электромотора-генератора 1.
Контроллер 14 трансмиссии выполняет управление переключением передач таким образом, чтобы получать команды переключения передач из интегрального контроллера 13.
Контроллер 15 муфты управляет током соленоидного клапана таким образом, чтобы реализовывать значение команды управления гидравлическим давлением муфты (током) относительно каждого значения команды управления гидравлическим давлением муфты из интегрального контроллера 13.
Контроллер 16 двигателя управляет крутящим моментом двигателя таким образом, чтобы получать значения команды управления крутящим моментом двигателя из интегрального контроллера 13.
Контроллер 17 электромотора управляет крутящим моментом электромотора таким образом, чтобы получать значения команды управления крутящим моментом электромотора из интегрального контроллера 13.
Контроллер 18 аккумулятора управляет состоянием заряда аккумулятора 9 и передает его информацию в интегральный контроллер 13.
Связь между каждым из контроллеров 13-18 выполняется через линию 22 связи.
[0012] Управление интегрального контроллера
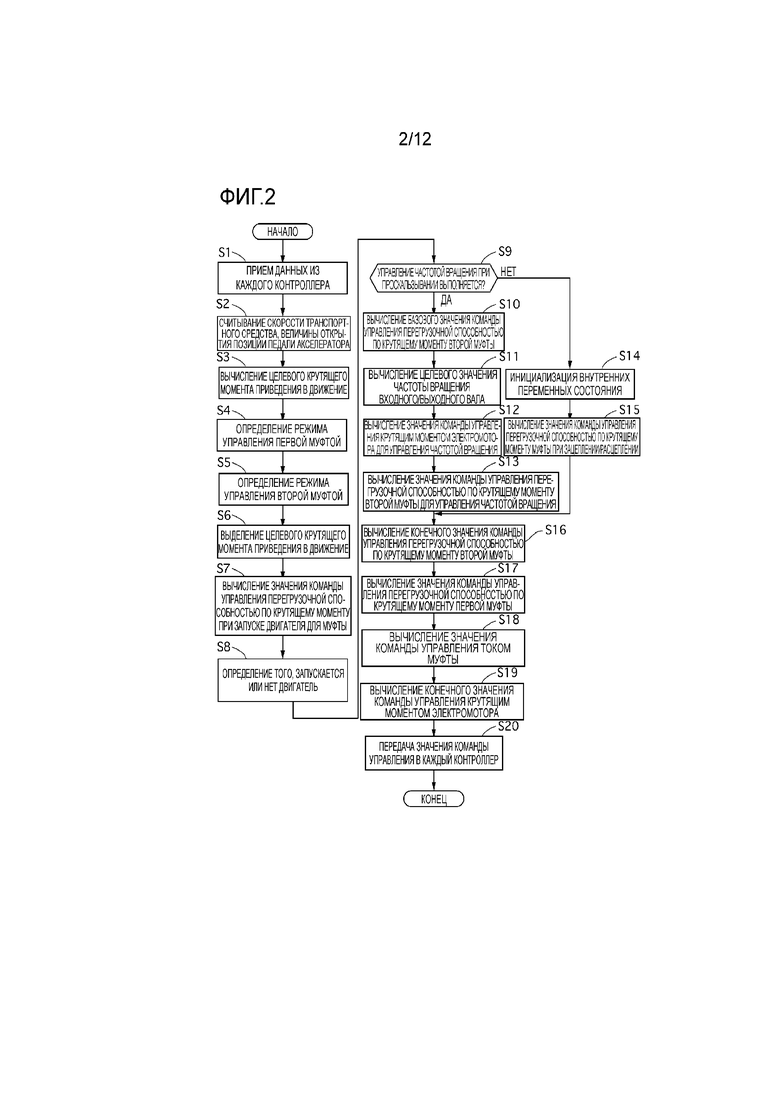
Фиг.2 является блок-схемой последовательности операций способа, иллюстрирующей контент обработки интегрального контроллера 13. Контент обработки предположительно выполняется в заданном цикле дискретизации.
На этапе S1, принимаются состояния транспортного средства, измеряемые посредством других контроллеров, такие как величина SOC заряда аккумулятора, позиция переключения передач трансмиссии 5, частота ωcl2i, ω0 вращения входного-выходного вала второй муфты 4, частота ωe вращения двигателя, рабочий режим Ests двигателя и скорость Vsp транспортного средства.
На этапе S2, величина Apo открытия позиции педали акселератора измеряется из датчика 10 позиции акселератора.
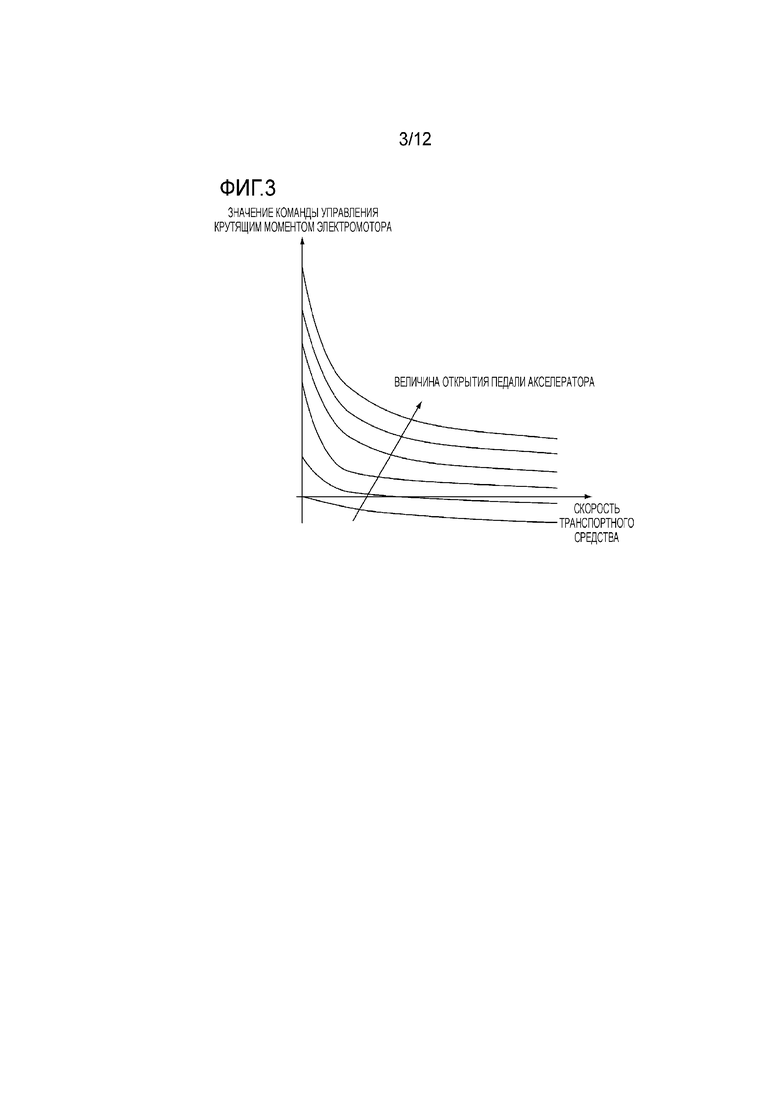
На этапе S3 (средство вычисления значений команд управления крутящим моментом приведения в движение), значение Td* команды управления крутящим моментом приведения в движение вычисляется из величины Apo открытия позиции педали акселератора и скорости Vsp транспортного средства. В первом варианте осуществления, например, вычисление выполняется в отношении карты вычисления значений команд управления крутящим моментом приведения в движение, соответствующей скорости Vsp транспортного средства и величине Apo открытия позиции педали акселератора, к примеру, проиллюстрированной на фиг.3. На фиг.3, значение Td* команды управления крутящим моментом приведения в движение задается большим по мере того, как возрастает величина Apo открытия позиции педали акселератора, и это значение задается меньшим по мере того, как возрастает скорость Vsp транспортного средства.
[0013] На этапе S4 режим управления первой муфтой (задание флага fCL1 режима первой муфты) задается из состояний транспортного средства, таких как величина SOC заряда аккумулятора, значение Td* команды управления крутящим моментом приведения в движение и скорость Vsp транспортного средства. Хотя подробности опущены здесь, например, в ситуации при движении, в которой эффективность двигателя 2 является относительно плохой, к примеру, при запуске при низком ускорении, движение выполняется только посредством электромотора (EV-режим); следовательно, первая муфта 3 расцепляется (fCL1=0). Помимо этого, EV-движение является затруднительным во время быстрого ускорения, когда величина SOC заряда аккумулятора равна или меньше предварительно определенного значения SOCth1, или когда скорость Vsp транспортного средства равна или выше предварительно определенного значения Vspth1 (частота вращения электромотора превышает допустимую частоту вращения); следовательно, первая муфта 3 зацепляется (fCL1=1) для того, чтобы двигаться с помощью двигателя 2 и электромотора 1 (HEV-режим).
На этапе S5 режим CL2MODE управления второй муфтой (зацепление, расцепление, проскальзывание) задается из состояний транспортного средства, таких как величина SOC заряда аккумулятора, значение Td* команды управления крутящим моментом приведения в движение, флаг fCL1 режима управления первой муфтой и скорость Vsp транспортного средства. Ниже описывается способ для того, чтобы задавать режим управления второй муфтой.
[0014] На этапе S6 значение Td* команды управления крутящим моментом приведения в движение выделяется базовому значению Te base* команды управления крутящим моментом двигателя и базовому значению Tm base* команды управления крутящим моментом электромотора на основе режима управления каждой муфты и состояния транспортного средства. Различные средства могут быть разработаны относительно способа выделения, но подробности опущены.
На этапе S7 (средство выделения перегрузочной способности по передаточному крутящему моменту), значения Tcl1 ENG START, Tcl2 ENG START команд управления перегрузочной способностью по крутящему моменту для каждой муфты при запуске двигателя вычисляются на основе режима управления каждой муфты, частоты ωe вращения двигателя, значения Td* команды управления крутящим моментом приведения в движение и различных состояний транспортного средства. Ниже подробно описывается способ вычисления.
На этапе S8 то, запускается ли или нет двигатель, определяется на основе флага fCL1 режима управления первой муфтой, частоты ωcl2i вращения входного вала второй муфты и частоты ωe вращения двигателя. На практике, когда режим управления первой муфтой представляет собой зацепленный режим, и когда частота вращения двигателя ниже частоты вращения входного вала второй муфты, определяется то, что двигатель запускается, и флаг fENG_ST запуска задается; иначе, определяется то, что двигатель не запускается, и флаг сбрасывается.
На этапе S9, определяется, должно ли или нет выполняться управление частотой вращения при проскальзывании второй муфты 4. Когда вторая муфта 4 задается в состояние проскальзывания в S5, и абсолютное значение фактической частоты вращения при проскальзывании (входной вал-выходной вал) становится равным или превышающим предварительно определенное значение, управление частотой вращения при проскальзывании активируется, и процесс переходит к этапу S10; когда задается как расцепленная или зацепленная, управление частотой вращения прекращается, и процесс переходит к этапу S14.
[0015] На этапе S10 вычисляется базовое значение Tcl2 base* команды управления перегрузочной способностью по крутящему моменту второй муфты. Здесь, например, предполагается значение, идентичное значению Td* команды управления крутящим моментом приведения в движение.
На этапе S11 целевое значение ωcl2i* частоты вращения входного вала вычисляется на основе флага fCL1 режима управления первой муфтой, базового значения Tcl2 base* команды управления перегрузочной способностью по крутящему моменту второй муфты, температуры Tempcl2 масла второй муфты, величины SOC заряда аккумулятора и значения ω0 измерения частоты вращения выходного вала. Ниже подробно описывается способ вычисления.
На этапе S12 вычисляется значение Tm FB ON команды управления крутящим моментом электромотора для управления частотой вращения, так что целевое значение ωcl2i* частоты вращения входного вала и значение ωcl2i измерения частоты вращения входного вала совпадают. Могут быть разработаны различные способы вычисления (управления); например, вычисление может выполняться с помощью следующей формулы (PI-управление). Для фактического вычисления, вычисление выполняется с использованием рекуррентной формулы, которая получается посредством дискретизации с аппроксимацией Тастина и т.п.
формула 1
 (1)
(1)
где:
KPm: пропорциональное усиление для управления электромотором
KIm: интегральное усиление для управления электромотором
S: дифференциальный оператор
[0016] На этапе S13 значение Tcl FB ON команды управления перегрузочной способностью по крутящему моменту второй муфты для управления частотой вращения вычисляется на основе базового значения Tcl2 base* команды управления перегрузочной способностью по крутящему моменту второй муфты, значения Tm FB ON команды управления крутящим моментом электромотора для управления частотой вращения и значения Te base* команды управления крутящим моментом двигателя. Ниже подробно описывается способ вычисления.
На этапе S14 инициализируется переменная внутреннего состояния для вычисления вышеописанного значения Tm FB ON команды управления крутящим моментом электромотора для управления частотой вращения и значения Tcl FB ON команды управления перегрузочной способностью по крутящему моменту второй муфты для управления частотой вращения.
На этапе S15, значение Tcl2 FB OFF команды управления перегрузочной способностью по крутящему моменту муфты, когда управление частотой вращения не выполняется, т.е. когда частота вращения управляется (переводится в состояние проскальзывания) из зацепленного/расцепленного состояния или зацепленного состояния второй муфты 4.
1. При зацеплении:
(1) Если 
 (2)
(2)
(2) Если 
 (3)
(3)
2. При расцеплении:
 (4)
(4)
3. Когда вторая муфта зацепляется → переводится в состояние проскальзывания:
 (5)
(5)
где:
Ksafe: коэффициент запаса второй муфты (>1)
ΔTcl2LU: скорость изменения перегрузочной способности по крутящему моменту при переходе из состояния проскальзывания (или расцепленного состояния) → в зацепленное состояние
ΔTcl2slp: скорость изменения перегрузочной способности по крутящему моменту при переходе из зацепленного состояния → в состояние проскальзывания
Tcl2 zl*: предыдущее значение конечного второго значения команды управления крутящим моментом
[0017] На этапе S16 конечное значение Tcl2* команды управления перегрузочной способностью по крутящему моменту второй муфты определяется с использованием следующих условий.
1. В ходе управления частотой вращения при проскальзывании:
(1) В ходе запуска двигателя (fENG STEP=1):
 (6)
(6)
(2) Случаи, отличные от вышеуказанного:
 (7)
(7)
2. Когда управление частотой вращения при проскальзывании прекращено:
 (8)
(8)
[0018] На этапе S17 значение Tcl1* команды управления перегрузочной способностью по крутящему моменту первой муфты определяется на основе флага fCL1 режима управления первой муфтой.
1. Когда режим управления первой муфтой представляет собой зацепленный режим:
(1) В ходе запуска двигателя (fENG STEP=1):
 (9)
(9)
(2) Случаи, отличные от вышеуказанного:
 (10)
(10)
где:
Tcl1 max: максимальная перегрузочная способность по крутящему моменту первой муфты
2. Когда режим управления первой муфтой представляет собой расцепленный режим:
 (11)
(11)
[0019] На этапе S18, значения ICL1*, ICL2* команд управления током вычисляются из значений Tcl1*, Tcl2* команд управления перегрузочной способностью по крутящему моменту муфты. На практике, это вычисление выполняется в отношении перегрузочной способности по крутящему моменту муфты, по карте преобразования гидравлического давления муфты на фиг.4(a), и гидравлического давления муфты, по карте преобразования тока на фиг.4(b), которая подготовлена на основе характеристик, полученных заранее. Вышеописанная теория линейного управления в силу этого может применяться, даже когда перегрузочная способность по крутящему моменту муфты имеет нелинейную характеристику относительно гидравлического давления и электрического тока, поскольку цель управления может считаться линейной.
На этапе S19, конечное значение Tm* команды управления крутящим моментом электромотора определяется на основе следующих условий.
1. В ходе управления частотой вращения при проскальзывании:
 (12)
(12)
2. Когда управление частотой вращения при проскальзывании прекращено:
 (13)
(13)
На этапе S20, вычисленное значение команды управления передается в каждый контроллер.
[0020] Операция задания режима управления второй муфтой
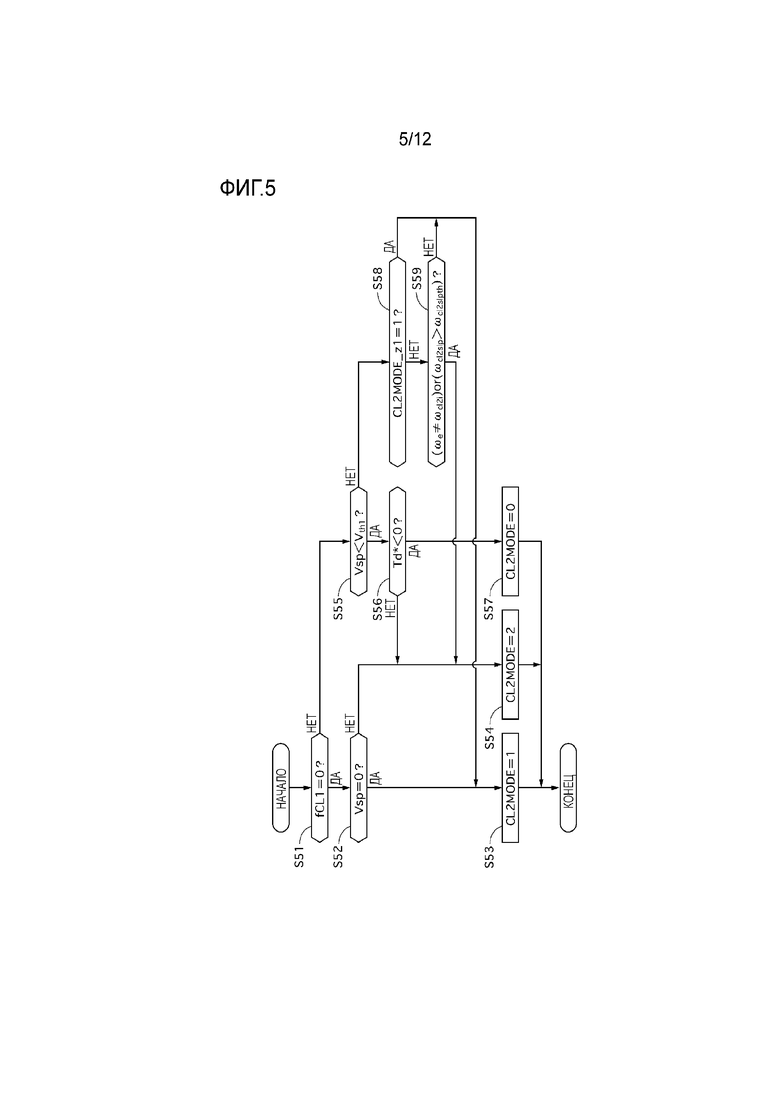
Фиг.5 является блок-схемой последовательности операций, иллюстрирующей способ для задания режима управления второй муфтой. Режим CL2MODE управления второй муфты 4 задается из состояний транспортного средства, таких как величина SOC заряда аккумулятора, значение Td* команды управления крутящим моментом приведения в движение, флаг fCL1 режима управления первой муфтой и скорость Vsp транспортного средства.
На этапе S51, определяется режим управления первой муфтой. Если режим управления первой муфтой представляет собой зацепленный (запуск двигателя) (fCL1=1), процесс переходит к этапу S55; если она находится в расцепленном режиме (остановка двигателя) (fCL1=0), процесс переходит к этапу S52.
На этапе S52 определяется, является ли или нет скорость Vsp транспортного средства нулевой (остановлено). Если остановлено, процесс переходит к этапу S53; иначе, процесс переходит к этапу S54.
На этапе S53, режим управления второй муфтой задается как зацепленный режим (CL2MODE=1).
На этапе S54, режим управления второй муфтой задается как режим проскальзывания (CL2MODE=2).
На этапе S55 определяется, выше ли или нет скорость Vsp транспортного средства предварительно определенного значения Vthl (например, минимальной скорости транспортного средства, при которой может быть запущен двигатель). Если ниже, процесс переходит к этапу S56, а если выше, процесс переходит к этапу S58.
[0021] На этапе S56, определяется знак значения Td* команды управления крутящим моментом приведения в движение; если положительный, процесс переходит к этапу S54, а если отрицательный, процесс переходит к этапу S57.
На этапе S57, режим управления второй муфтой задается как расцепленный режим (CL2MODE=0).
На этапе S58 определяется, представляет ли собой или нет предыдущий режим управления второй муфтой зацепленный режим. Если режим представляет собой зацепленный режим, процесс переходит к этапу S53; иначе, процесс переходит к этапу S59.
На этапе S59 определяется, удовлетворяется ли или нет условие продолжения проскальзывания, определяется на основе значения ωe измерения частоты вращения двигателя, значения ωcl2slp измерения частоты вращения при проскальзывании второй муфты и порогового значения ωcl2slpth частоты вращения при проскальзывании. Когда условие продолжения проскальзывания устанавливается, процесс переходит к этапу S54, и проскальзывание начинается или продолжается; если условие не устанавливается, процесс переходит к этапу S53, и проскальзывание завершается, чтобы переходить в зацепленный режим. Условие продолжения проскальзывания заключается в следующем:
ωe≠ωcl2i (первая муфта расцеплена или в режиме проскальзывания), либо ωcl2slp>ωcl2slpth
[0022] Вычисление целевого значения частоты вращения входного вала
Далее описывается способ для вычисления целевого значения ωcl2i* частоты вращения входного вала.
Во-первых, целевое значение ωcl2slp* частоты вращения при проскальзывании второй муфты вычисляется на основе следующего.
1. Если в EV-режиме (fCL1=0)
 (14)
(14)
Здесь, fcl2slp cl10p () является функцией, в которую вводятся базовое значение Tcl2 base* команды управления перегрузочной способностью по крутящему моменту второй муфты и температура Tempcl2 масла второй муфты. На практике, например, вышеуказанное задается из карты вычисления целевых значений частоты вращения при проскальзывании второй муфты на основе базового значения Tcl base* команды управления перегрузочной способностью по крутящему моменту второй муфты и температуры Tempcl2 масла второй муфты, к примеру, показанной на фиг.6(a). Целевое значение ωcl2 slp* частоты вращения при проскальзывании второй муфты в EV-режиме задается таким образом, что оно уменьшается по мере того, как возрастает температура Tempcl2 масла второй муфты, и задается таким образом, что оно уменьшается по мере того, как возрастает базовое значение Tcl base* команды управления перегрузочной способностью по крутящему моменту второй муфты, как проиллюстрировано на фиг.6(a). Когда "температура масла является высокой" или когда "значение команды управления перегрузочной способностью муфты является большим" во второй муфте 4, повышение температуры масла муфты может предотвращаться посредством уменьшения конкретного для целевого значения ωcl2 slp* частоты вращения при проскальзывании второй муфты пика.
[0023] 2. В ходе запуска за счет крутящего момента двигателя:
 (15)
(15)
Здесь, fcl2 slp cl10P () является функцией для вычисления величины увеличения частоты вращения при проскальзывании для запуска двигателя, в которую вводится выделенный крутящий момент Teng START электромотора при запуске двигателя. На практике, например, используется карта вычисления целевых значений частоты вращения при проскальзывании второй муфты на основе выделенного крутящего момента Teng START электромотора при запуске двигателя, как проиллюстрировано на фиг.6(b). Целевое значение ωcl2slp* частоты вращения при проскальзывании второй муфты в ходе запуска за счет крутящего момента двигателя задается таким образом, что оно повышается по мере того, как уменьшается выделенный крутящий момент Teng START электромотора при запуске двигателя, как проиллюстрировано на фиг.6(b). Резкое зацепление в силу этого может предотвращаться, даже если частота вращения уменьшается, поскольку возмущения из первой муфты 3 не могут полностью уравновешиваться; как результат, двигатель 2 может запускаться без формирования варьирования ускорения.
Если управление проскальзыванием продолжается после запуска двигателя, частота вращения при проскальзывании выполнена с возможностью быть идентичной частоте вращения при проскальзывании в ходе EV-движения (увеличенный участок не добавляется).
[0024] Затем, целевое значение ωcl2i* частоты вращения входного вала вычисляется на основе целевого значения ωcl2 slp* частоты вращения при проскальзывании и значения ω0 измерения частоты вращения выходного вала с помощью следующей формулы:
 (16)
(16)
В завершение, верхний и нижний пределы задаются равными целевому значению ωcl2i* частоты вращения входного вала, вычисленному из вышеприведенной формулы, с тем чтобы задавать конечное целевое значение частоты вращения входного вала. Верхний и нижний пределы задаются в качестве верхнего и нижнего пределов частоты вращения двигателя.
[0025] Вычисление значения команды управления перегрузочной способностью по крутящему моменту второй муфты для управления частотой вращения
Далее подробно описывается способ для вычисления значения Tcl FB ON команды управления перегрузочной способностью по крутящему моменту второй муфты для управления частотой вращения.
Фиг.7 является блок-схемой управления с обратной связью для второй муфты. Настоящая система управления спроектирована посредством способа управления с 2 степенями свободы, содержащего компенсацию с прямой связью (F/F) и компенсацию с обратной связью (F/B). Различные способы проектирования модуля F/B-компенсации могут быть разработаны, но здесь PI-управление описывается в качестве одного примера. Ниже описывается способ его вычисления.
Во-первых, фазовая компенсация применяется к базовому значению Tcl2 base* команды управления перегрузочной способностью по крутящему моменту второй муфты на основе фазового компенсационного фильтра GFF(s), который проиллюстрирован посредством следующей формулы, чтобы вычислять F/F-значение Tcl2 base* команды управления перегрузочной способностью по крутящему моменту второй муфты. Для фактического вычисления, вычисление выполняется с использованием рекуррентной формулы, полученной посредством дискретизации с аппроксимацией Тастина и т.п.
формула 2
 (17)
(17)
где:
τ c12: постоянная времени модели на основе муфт
τ c12 ref: нормативная постоянная времени отклика для управления муфтой
[0026] Затем, целевое значение tcl2 t перегрузочной способности по крутящему моменту второй муфты вычисляется на основе следующего.
1. Если в EV-режиме:
 (18)
(18)
2. Если в HEV-режиме (первая муфта находится в зацепленном состоянии):
 (19)
(19)
Целевое значение перегрузочной способности по крутящему моменту второй муфты в HEV-режиме означает перегрузочную способность компонента электромотора относительно совокупной перегрузочной способности по крутящему моменту (двигателя 2 и электромотора 1). Te est является оцененным значением крутящего момента двигателя, которое, например, вычисляется на основе следующей формулы:
формула 3
 (20)
(20)
где:
τ e: постоянная времени запаздывания первого порядка двигателя
Le: время работы вхолостую двигателя
[0027] Затем, опорное значение Tcl2 ref перегрузочной способности по крутящему моменту второй муфты вычисляется на основе следующей формулы:
формула 4
 (21)
(21)
Затем, F/B-значение Tcl2 FB команды управления перегрузочной способностью по крутящему моменту второй муфты вычисляется на основе опорного значения Tcl2 ref перегрузочной способности по крутящему моменту второй муфты и вышеописанного значения Tm FB ON команды управления крутящим моментом электромотора для управления частотой вращения с помощью следующей формулы:
формула 5
 (22)
(22)
где:
Kpcl2: пропорциональное усиление для управления второй муфтой
KIcl2: интегральное усиление для управления второй муфтой
[0028] Помимо этого, посредством рассмотрения крутящего момента, который формируется посредством изменения частоты вращения входного вала (инерционного крутящего момента), аналогично следующей формуле, перегрузочная способность по крутящему моменту может точно управляться, даже когда частота вращения входного вала изменяется:
формула 6
 (23)
(23)
Здесь, TIcl2 est является оцененным значением инерционного крутящего момента, которое получается, например, посредством умножения момента инерции вокруг входного вала на величину изменения частоты вращения входного вала (дифференциальное значение).
Затем F/F-значение Tcl2 FF команды управления перегрузочной способностью по крутящему моменту второй муфты и F/B-значение Tcl2 FB команды управления перегрузочной способностью по крутящему моменту второй муфты суммируются для того, чтобы вычислять конечное значение Tcl2 FB ON команды управления перегрузочной способностью по крутящему моменту второй муфты для управления частотой вращения.
[0029] Вычисление значения команды управления перегрузочной способностью по крутящему моменту
Далее подробно описывается способ для вычисления значений Tcl1 ENG START, Tcl2 ENG START команд управления перегрузочной способностью по крутящему моменту каждой муфты при запуске двигателя. Фиг.8 является блок-схемой последовательности операций, иллюстрирующей способ вычисления значений команд управления перегрузочной способностью по крутящему моменту для каждой муфты при запуске двигателя.
На этапе S71 определяется, представляет ли собой или нет режим управления первой муфтой расцепленный режим. Если не представляет собой расцепленный режим (если в зацепленном режиме), процесс переходит к этапу S72; если в расцепленном режиме, процесс завершается.
На этапе S72 определяется, представляет ли собой или нет предыдущий режим управления первой муфтой зацепленный режим. Если предыдущий режим не представляет собой зацепленный режим (если режим представляет собой расцепленный режим), процесс переходит к этапу S73; если режим представляет собой зацепленный режим, процесс переходит к этапу S74.
[0030] На этапе S73 (средство вычисления скорости изменения значений команд управления крутящим моментом приведения в движение), вычисляется скорость dTd*/dt изменения значения команды управления крутящим моментом приведения в движение (дифференциальное значение). Скорость dTd*/dt изменения значения команды управления крутящим моментом приведения в движение (дифференциальное значение) вычисляется, например, посредством с использованием операции приближенного дифференцирования согласно обходному фильтру.
На этапе S74 (средство вычисления нижнего предельного крутящего момента при запуске двигателя), нижний предельный крутящий момент TENG START при запуске двигателя, который является минимальной величиной, требуемой для проворачивания при текущей частоте вращения двигателя, вычисляется на основе частоты ωe вращения двигателя и рабочего режима Ests двигателя (после начальной детонации или нет). На практике, если перед начальной детонацией, вычисление выполняется с использованием карты вычисления нижнего предельного крутящего момента при запуске двигателя (см. фиг.9), которая подготовлена из значения, полученного посредством суммирования крутящего момента трения двигателя для каждой частоты вращения, полученной посредством экспериментирования или других средств заранее, и участка, требуемого для увеличения вращения двигателя. Дополнительно, если после начальной детонации, значение получается посредством вычитания крутящего момента, который выводится посредством самого двигателя, из крутящего момента, который необходим для окончания запуска двигателя (увеличивается до частоты вращения входного вала второй муфты) в течение предварительно определенного времени.
[0031] На этапе S75 (средство вычисления верхнего предельного крутящего момента электромотора), верхний предельный крутящий момент Tm HLMT электромотора вычисляется из величины SOC заряда аккумулятора (или напряжения V8 на контактных выводах) и частоты ωcl2i вращения входного вала. На практике, вычисление выполняется, например, посредством использования карты вычисления верхнего предельного крутящего момента электромотора, такой как карта, проиллюстрированная на фиг.10.
На этапе S76 (средство вычисления верхних предельных значений перегрузочной способности по крутящему моменту второй муфты), верхнее предельное значение Tcl2 ENG START HLMT перегрузочной способности по крутящему моменту второй муфты вычисляется на основе нижнего предельного крутящего момента TENG START при запуске двигателя и верхнего предельного крутящего момента Tm HLMT электромотора.
Tcl2 ENG START HLMT=Tm HLMT-TENG START. (24)
На этапе S77 (средство вычисления максимальных значений перегрузочной способности по крутящему моменту второй муфты), максимальное значение Tcl2 ENG START max перегрузочной способности по крутящему моменту второй муфты, которое является максимальным значением крутящего момента, которое может выделяться второй муфте при запуске двигателя, вычисляется на основе верхнего предельного крутящего момента Tm HLMT электромотора и минимального значения TENG START min нижнего предельного крутящего момента при запуске двигателя, которое вычисляется на этапе S74, с помощью следующей формулы
Tcl2 ENG START max=Tm HLMT-Tcl2 ENG START min. (25)
Минимальное значение TENG START min нижнего предельного крутящего момента при запуске двигателя является минимальным значением нижнего предельного крутящего момента TENG START при запуске двигателя до и после начальной детонации, и значение, полученное заранее, используется для него.
[0032] На этапе S78, базовое значение Tcl2 ENG START B команды управления перегрузочной способностью по крутящему моменту второй муфты для запуска двигателя определяется на основе верхнего предельного значения Tcl2 ENG START HLMT перегрузочной способности по крутящему моменту второй муфты и значения Td* команды управления крутящим моментом приведения в движение с использованием следующего:
1. Когда Td*>Tcl2 ENG START HLMT
Tcl2 ENG START B=Tcl2 ENG START HLMT
2. Когда Td* ≤ Tcl2 ENG START HLMT
Tcl2 ENG START B=Td*
На этапе S79, вычисление выполняется на основе значения Td* команды управления крутящим моментом приведения в движение и скорости dTd*/dt его изменения, с использованием следующего:
1. Когда Tcl2 ENG START max ≥ Td*
Kcl2 ENG START=1,0
2. Когда Tcl2 ENG START max<Td*
Kcl2 ENG START=fcl2 ENG START (dTd*/dt)
fcl2_ENG_START (dTd*/dt) является функцией, в которую вводится скорость dTd*/dt изменения значения команды управления крутящим моментом приведения в движение, которая задается равной характеристике, проиллюстрированной на фиг.11. Фиг.11 является характерным видом значения Kcl2_ENG_START коррекции команды управления перегрузочной способностью по крутящему моменту второй муфты, соответствующего скорости dTd*/dt изменения значения команды управления крутящим моментом приведения в движение; Kcl2_ENG_START равно 1,0, когда dTd*/dt находится в пределах диапазона от нуля до первого предварительно определенного значения и уменьшается по мере того, как возрастает dTd*/dt, когда в пределах диапазона от первого предварительно определенного значения до второго предварительно определенного значения (>первого предварительно определенного значения).
[0033] На этапе S710, конечное значение Tcl2_ENG_START команды управления перегрузочной способностью по крутящему моменту второй муфты для запуска двигателя вычисляется на основе базового значения Tcl2_ENG_START_B команды управления перегрузочной способностью по крутящему моменту второй муфты для запуска двигателя и значения Kcl2_ENG_START коррекции команды управления перегрузочной способностью по крутящему моменту второй муфты с помощью следующей формулы:
Tcl2 ENG START=Tcl2 ENG START B.* Kcl2 ENG START. (26)
На этапе S711, значение Tcl1_ENG_START команды управления перегрузочной способностью по крутящему моменту первой муфты для запуска двигателя вычисляется на основе верхнего предельного крутящего момента Tm_HLMT электромотора и значения Kcl2_ENG_START команды управления перегрузочной способностью по крутящему моменту второй муфты для запуска двигателя с помощью следующей формулы:
Tcl1 ENG START=Tm HLMT-Tcl2 ENG START. (27)
[0034] Далее описываются преимущества.
Преимущество выделения перегрузочной способности по крутящему моменту муфты
Фиг.12 является временной диаграммой, показывающей то, когда двигатель запускается посредством резкой операции с акселератором в ходе EV-движения и при движении, в то время как величина нажатия имеет низкую величину открытия (резкое ускорение). В традиционном устройстве управления муфтой выделение перегрузочной способности по крутящему моменту первой муфты увеличивается по мере того, как возрастает скорость нажатия педали акселератора; как результат, ускорение является инертным, и рабочие характеристики ускорения, которые требуются водителем, не могут получаться сразу после нажатия до тех пор, пока не будет завершен запуск двигателя.
Напротив, в первом варианте осуществления, когда величина нажатия педали акселератора является небольшой, и значение Td* команды управления крутящим моментом приведения в движение равно или меньше максимального значения Tcl2 ENG START max перегрузочной способности по крутящему моменту второй муфты, аналогично ситуации, проиллюстрированной на фиг.12, значение Kcl2 ENG START коррекции команды управления перегрузочной способностью по крутящему моменту второй муфты, которое корректирует базовое значение Tcl2 ENG START B команды управления перегрузочной способностью по крутящему моменту второй муфты для запуска двигателя, принимает максимальное значение (1,0). Иными словами, когда значение Td* команды управления крутящим моментом приведения в движение может быть реализовано посредством только крутящего момента электромотора, выделение перегрузочной способности по крутящему моменту второй муфты максимизируется, независимо от скорости dTd*/dt изменения значения команды управления крутящим моментом приведения в движение. Здесь, поскольку значение Td* команды управления крутящим моментом приведения в движение является большим значением по мере того, как возрастает величина Apo открытия позиции педали акселератора, если перефразировать вышесказанное, в первом варианте осуществления, когда величина Apo открытия позиции педали акселератора является низкой величиной открытия (равной или меньшей предварительно определенной величины открытия позиции педали акселератора), выделение перегрузочной способности по крутящему моменту второй муфты максимизируется, независимо от скорости нажатия педали акселератора. Иными словами, когда требуемое ускорение водителя является небольшим, и значение Td* команды управления крутящим моментом приведения в движение может быть реализовано только посредством значения Td* команды управления крутящим моментом приведения в движение, крутящий момент приведения в движение может согласовываться со значением Td* команды управления крутящим моментом приведения в движение сразу после нажатия посредством приоритезации увеличения крутящего момента приведения в движение над сокращением времени запуска двигателя. Следовательно, поскольку инертность ускорения может снижаться относительно предшествующего уровня техники, описанного выше, могут получаться требуемые рабочие характеристики ускорения водителя.
[0035] Фиг.13 является временной диаграммой, показывающей то, когда двигатель запускается посредством резкой операции с акселератором в ходе EV-движения и при движении, в то время как величина нажатия имеет высокую величину открытия. В этом случае, значение Td* команды управления крутящим моментом приведения в движение превышает максимальное значение Tcl2 ENG START max перегрузочной способности по крутящему моменту второй муфты, и значение Kcl2 ENG START коррекции команды управления перегрузочной способностью по крутящему моменту второй муфты становится fcl2 ENG START (dTd*/dt), принимая меньшее значение по мере того, как возрастает скорость dTd*/dt изменения значения команды управления крутящим моментом приведения в движение. Иными словами, когда значение Td* команды управления крутящим моментом приведения в движение не может быть реализовано посредством только крутящего момента электромотора, выделение перегрузочной способности по крутящему моменту первой муфты увеличивается по мере того, как возрастает скорость dTd*/dt изменения значения команды управления крутящим моментом приведения в движение. Здесь, поскольку скорость dTd*/dt изменения значения команды управления крутящим моментом приведения в движение является большим значением по мере того, как возрастает скорость нажатия педали акселератора, если перефразировать вышесказанное, в первом варианте осуществления, когда величина Apo открытия позиции педали акселератора является высокой величиной открытия (превышает предварительно определенную величину открытия позиции педали акселератора), выделение перегрузочной способности по крутящему моменту первой муфты увеличивается по мере того, как возрастает скорость нажатия педали акселератора. Другими словами, если требуемое ускорение водителя является большим, крутящий момент электромотора не достигает значения Td* команды управления крутящим моментом приведения в движение, даже если увеличивается; как результат, крутящий момент двигателя быстро формируется посредством приоритезации сокращения времени запуска двигателя над увеличением крутящего момента приведения в движение. Крутящий момент приведения в движение в силу этого может увеличиваться до значения Td* команды управления крутящим моментом приведения в движение на ранней стадии, и могут получаться требуемые рабочие характеристики ускорения водителя.
[0036] Фиг.14 является временной диаграммой, показывающей то, когда двигатель запускается посредством резкой операции с акселератором в ходе EV-движения и при движении, в то время как величина нажатия имеет среднюю величину открытия. В этом случае, значение Td* команды управления крутящим моментом приведения в движение меньше максимального значения Tcl2 ENG START max перегрузочной способности по крутящему моменту второй муфты, и значение Kcl2 ENG START коррекции команды управления перегрузочной способностью по крутящему моменту второй муфты принимает максимальное значение (1,0). Здесь, нижний предельный крутящий момент TENG START при запуске двигателя становится меньшим по мере того, как возрастает частота ωe вращения двигателя, как проиллюстрировано на фиг.9. В частности, после начальной детонации двигателя, сам двигатель формирует крутящий момент сгорания; как результат, крутящий момент проворачивания, требуемый для запуска двигателя, становится меньшим, по сравнению с моментом перед начальной детонацией. С другой стороны, верхний предельный крутящий момент Tm HLMT электромотора уменьшается по мере того, как возрастает частота ωe вращения двигателя области, в которой частота ωe вращения двигателя является высокой, но является постоянной в области, в которой частота ωe вращения двигателя является низкой, к примеру, при запуске двигателя, как проиллюстрировано на фиг.10. Иными словами, верхнее предельное значение Tcl2 ENG START HLMT перегрузочной способности по крутящему моменту второй муфты увеличивается по мере того, как возрастает частота ωe вращения двигателя. Следовательно, в первом варианте осуществления, после удаления нижнего предельного крутящего момента TENG START при запуске двигателя, весь остаток, требуемый для запуска двигателя из верхнего предельного крутящего момента Tm HLMT электромотора, который представляет собой крутящий момент, вывод которого допускает электромотор 1 (верхнего предельного значения Tcl2 ENG START HLMT перегрузочной способности по крутящему моменту второй муфты), задается в качестве значения Tcl2 ENG START команды управления перегрузочной способностью по крутящему моменту второй муфты для запуска двигателя; значение, полученное посредством вычитания значения Tcl2 ENG START команды управления перегрузочной способностью по крутящему моменту второй муфты для запуска двигателя из верхнего предельного крутящего момента Tm HLMT электромотора, задается в качестве значения Tcl1 ENG START команды управления перегрузочной способностью по крутящему моменту первой муфты для запуска двигателя. Крутящий момент приведения в движение транспортного средства в силу этого может увеличиваться вместе с повышением частоты ωe вращения двигателя при надежном запуске двигателя 2 в диапазоне верхнего предельного крутящего момента Tm HLMT электромотора; как результат, крутящий момент приведения в движение может согласовываться со значением Td* команды управления крутящим моментом приведения в движение после начальной детонации двигателя и до того, как завершен запуск двигателя, т.е. в момент времени перед переходом в HEV-режим, как проиллюстрировано на фиг.14. Следовательно, инертность ускорения может подавляться, и требуемое ускорение может получаться на более ранней стадии.
[0037] Нижеуказанные преимущества могут быть получены в первом варианте осуществления, как описано выше.
(1) Вариант осуществления содержит двигатель 2, электромотор-генератор 1, первую муфту 3 для прерывания передачи крутящего момента между двигателем 2 и электромотором-генератором 1; вторую муфту 4 для прерывания передачи крутящего момента между электромотором-генератором 1 и ведущими колесами 21a, 21b; интегральный контроллер 13 для запуска двигателя 2 посредством использования крутящего момента электромотора-генератора 1, при переключении из режима электромобиля, который отключает первую муфту 3 и обеспечивает движение за счет крутящего момента электромотора-генератора 1, на гибридный режим, который соединяет первую муфту 3 и обеспечивает движение за счет крутящего момента двигателя 2 и электромотора-генератора 1; средство вычисления верхнего предельного крутящего момента электромотора (этап S75) для вычисления верхнего предельного крутящего момента Tm HLMT электромотора; и средство выделения перегрузочной способности по передаточному крутящему моменту (этап S7) для выделения значения Tcl1 ENG START команды управления перегрузочной способностью по крутящему моменту первой муфты для запуска двигателя и значения Tcl2 ENG START команды управления перегрузочной способностью по крутящему моменту второй муфты для запуска двигателя в диапазоне верхнего предельного крутящего момента Tm HLMT электромотора, при запуске двигателя согласно нажатию педали акселератора, при этом средство выделения перегрузочной способности по передаточному крутящему моменту увеличивает выделение значения Tcl2 ENG START команды управления перегрузочной способностью по крутящему моменту второй муфты для запуска двигателя, когда величина открытия позиции педали акселератора равна или меньше предварительно определенной величины открытия позиции педали акселератора, по сравнению с тем, когда превышение предварительно определенной величины открытия позиции педали акселератора. Следовательно, когда требуемое ускорение водителя является небольшим, крутящий момент приведения в движение может согласовываться со значением Td* команды управления крутящим моментом приведения в движение сразу после нажатия посредством приоритезации увеличения крутящего момента приведения в движение над сокращением времени запуска двигателя, и могут быть реализованы рабочие характеристики ускорения, которые требуются водителем.
[0038] (2) Средство выделения перегрузочной способности по передаточному крутящему моменту увеличивает выделение значения Tcl1 ENG START команды управления перегрузочной способностью по крутящему моменту первой муфты для запуска двигателя по мере того, как возрастает скорость нажатия педали акселератора, когда величина открытия позиции педали акселератора превышает предварительно определенную величину открытия позиции педали акселератора.
Следовательно, когда требуемое ускорение водителя является большим, крутящий момент двигателя может быть быстро сформирован, и крутящий момент приведения в движение может увеличиваться до значения Td* команды управления крутящим моментом приведения в движение на более ранней стадии посредством приоритезации сокращения времени запуска двигателя над увеличением крутящего момента приведения в движение; как результат, могут быть реализованы рабочие характеристики ускорения, которые требуются водителем.
[0039] (3) Вариант осуществления содержит средство вычисления значений команд управления крутящим моментом приведения в движение (этап S3) для вычисления значения Td* команды управления крутящим моментом приведения в движение на основе величины открытия позиции педали акселератора; средство вычисления скорости изменения значений команд управления крутящим моментом приведения в движение (этап S73) для вычисления скорости dTd*/dt изменения значения Td* команды управления крутящим моментом приведения в движение; и средство вычисления максимальных значений перегрузочной способности по крутящему моменту второй муфты (этап S77) для вычисления максимального значения Tcl2 ENG START max перегрузочной способности по крутящему моменту второй муфты, которое является максимальным значением крутящего момента, которое может выделяться второй муфте 4 при запуске двигателя, посредством вычитания минимального значения TENG START min нижнего предельного крутящего момента при запуске двигателя, которое является минимальным значением нижнего предельного крутящего момента при запуске двигателя, которое минимально требуется для проворачивания, из верхнего предельного крутящего момента Tm HLMT электромотора, при этом средство выделения перегрузочной способности по передаточному крутящему моменту максимизирует выделение значения Tcl2 ENG START команды управления перегрузочной способностью по крутящему моменту второй муфты для запуска двигателя, когда значение Td* команды управления крутящим моментом приведения в движение равно или меньше максимального значения Tcl2 ENG START max перегрузочной способности по крутящему моменту второй муфты, и увеличивает выделение значения Tcl1 ENG START команды управления перегрузочной способностью по крутящему моменту первой муфты для запуска двигателя по мере того, как возрастает скорость dTd*/dt изменения значения команды управления крутящим моментом приведения в движение, когда значение Td* команды управления крутящим моментом приведения в движение превышает максимальное значение Tcl2 ENG START max перегрузочной способности по крутящему моменту второй муфты.
Иными словами, когда значение Td* команды управления крутящим моментом приведения в движение может быть реализовано только посредством крутящего момента электромотора, крутящий момент приведения в движение может согласовываться со значением Td* команды управления крутящим моментом приведения в движение сразу после нажатия посредством приоритезации увеличения крутящего момента приведения в движение. С другой стороны, когда значение Td* команды управления крутящим моментом приведения в движение не может быть реализовано посредством только крутящего момента электромотора, крутящий момент двигателя может быть быстро сформирован, и крутящий момент приведения в движение может увеличиваться до значения Td* команды управления крутящим моментом приведения в движение на более ранней стадии посредством приоритезации сокращения времени запуска двигателя по мере того, как возрастает скорость dTd*/dt изменения значения команды управления крутящим моментом приведения в движение.
[0040] (4) Он содержит средство вычисления нижнего предельного крутящего момента при запуске двигателя (S74) для вычисления нижнего предельного крутящего момента TENG START при запуске двигателя, который минимально требуется для проворачивания при текущей частоте вращения двигателя, а также средство вычисления верхних предельных значений перегрузочной способности по крутящему моменту второй муфты (S76) для вычисления верхнего предельного значения Tcl2 ENG START HLMT перегрузочной способности по крутящему моменту второй муфты, которое может выделяться второй муфте 4, посредством вычитания нижнего предельного крутящего момента TENG START при запуске двигателя из верхнего предельного крутящего момента Tm HLMT электромотора, при этом средство выделения перегрузочной способности по передаточному крутящему моменту задает значение, ограничивающее верхний предел значения Td* команды управления крутящим моментом приведения в движение верхним предельным значением Tcl2 ENG START HLMT перегрузочной способности по крутящему моменту второй муфты в качестве значения Tcl2 ENG START команды управления перегрузочной способностью по крутящему моменту второй муфты для запуска двигателя, и задает значение, полученное посредством вычитания значения Tcl2 ENG START команды управления перегрузочной способностью по крутящему моменту второй муфты для запуска двигателя на основе верхнего предельного крутящего момента Tm HLMT электромотора в качестве значения Tcl1 ENG START команды управления перегрузочной способностью по крутящему моменту первой муфты для запуска двигателя, когда значение Td* команды управления крутящим моментом приведения в движение равно или меньше максимального значения Tcl2 ENG START max перегрузочной способности по крутящему моменту второй муфты; дополнительно, средство выделения перегрузочной способности по передаточному крутящему моменту задает значение, полученное посредством его уменьшения таким образом, чтобы корректировать значение, ограничивающее верхний предел значения Td* команды управления крутящим моментом приведения в движение верхним предельным значением Tcl2 ENG START HLMT перегрузочной способности по крутящему моменту второй муфты по мере того, как возрастает скорость dTd*/dt изменения значения Td* команды управления крутящим моментом приведения в движение, в качестве значения Tcl2 ENG START команды управления перегрузочной способностью по крутящему моменту второй муфты для запуска двигателя, и задает значение, вычитая значение Tcl2 ENG START команды управления перегрузочной способностью по крутящему моменту второй муфты для запуска двигателя из верхнего предельного крутящего момента Tm HLMT электромотора, в качестве значения Tcl1 ENG START команды управления перегрузочной способностью по крутящему моменту первой муфты для запуска двигателя, когда значение Td* команды управления крутящим моментом приведения в движение превышает максимальное значение Tcl2 ENG START max перегрузочной способности по крутящему моменту второй муфты.
Следовательно, крутящий момент приведения в движение транспортного средства может увеличиваться вместе с повышением частоты ωe вращения двигателя при надежном запуске двигателя 2 в диапазоне верхнего предельного крутящего момента Tm HLMT электромотора; как результат, инертность ускорения может подавляться, и требуемое ускорение может получаться на более ранней стадии.
[0041] Другие варианты осуществления
Выше описан предпочтительный вариант осуществления настоящего изобретения на основе одного варианта осуществления, но конкретные конфигурации настоящего изобретения не ограничены посредством варианта осуществления; и конструктивные изменения, внесенные без отступления от объема изобретения, также включаются в настоящее изобретение.
Изобретение относится к гибридным транспортным средствам. Устройство управления муфтой для гибридного транспортного средства содержит средство выделения перегрузочной способности по передаточному крутящему моменту; средство вычисления значений команд управления крутящим моментом приведения в движение; средство вычисления скорости изменения значений команд управления крутящим моментом приведения в движение и средство вычисления максимальных значений перегрузочной способности по крутящему моменту второй муфты. Средство выделения перегрузочной способности максимизирует значения команды управления перегрузочной способностью второй муфты, когда значение команды управления моментом приведения в движение равно или меньше максимальной перегрузочной способности и увеличивает значения команды управления перегрузочной способностью по крутящему моменту первой муфты по мере того, как возрастает скорость изменения значения команды управления моментом приведения в движение, когда значение команды управления моментом приведения в движение превышает максимальную перегрузочную способность по крутящему моменту второй муфты. Реализуются требуемые водителем рабочие характеристики ускорения. 2 з.п. ф-лы, 14 ил.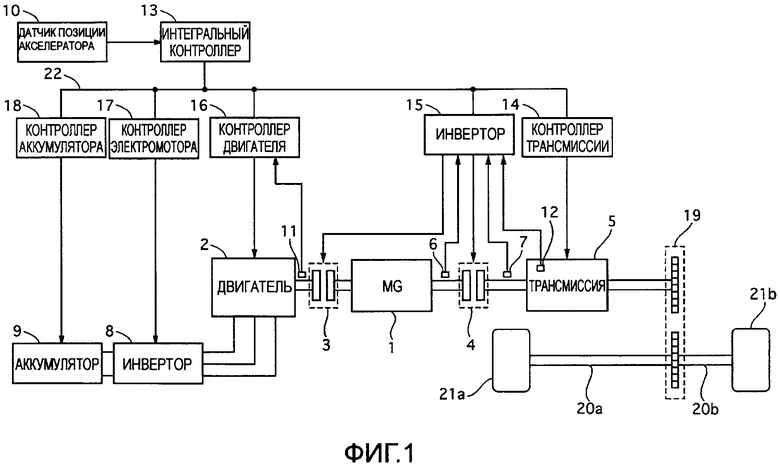
1. Устройство управления муфтой для гибридного транспортного средства, содержащего: двигатель (2); электромотор-генератор (1); первую муфту (3) для прерывания передачи крутящего момента между двигателем (2) и электромотором-генератором (1); вторую муфту (4) для прерывания передачи крутящего момента между электромотором-генератором (1) и ведущими колесами; средство запуска двигателя для запуска двигателя (2) посредством использования крутящего момента от электромотора-генератора (1) при переключении из режима электромобиля, который отключает первую муфту (3) и обеспечивает движение за счет крутящего момента электромотора-генератора (1), на гибридный режим, который соединяет первую муфту (3) и обеспечивает движение за счет крутящего момента двигателя (2) и электромотора-генератора (1); средство вычисления верхнего предельного крутящего момента электромотора для вычисления верхнего предельного крутящего момента электромотора;
при этом упомянутое устройство управления муфтой для гибридного транспортного средства содержит:
средство (S7) выделения перегрузочной способности по передаточному крутящему моменту для выделения значения команды управления перегрузочной способностью по передаточному крутящему моменту первой муфты и значения команды управления перегрузочной способностью по передаточному крутящему моменту второй муфты в диапазоне верхнего предельного крутящего момента электромотора при запуске двигателя (2) согласно нажатию педали акселератора, при этом средство (S7) выделения перегрузочной способности по передаточному крутящему моменту выполнено с возможностью управления таким образом, что выделение значения команды управления перегрузочной способностью по передаточному крутящему моменту второй муфты увеличивается, когда величина открытия позиции педали акселератора равна или меньше предварительно определенной величины открытия позиции педали акселератора, по сравнению с тем, когда существует превышение предварительно определенной величины открытия позиции педали акселератора;
средство (S3) вычисления значений команд управления крутящим моментом приведения в движение для вычисления значения команды управления крутящим моментом приведения в движение на основе величины открытия позиции педали акселератора;
средство (S73) вычисления скорости изменения значений команд управления крутящим моментом приведения в движение для вычисления скорости изменения значения команды управления крутящим моментом приведения в движение; и
средство (S77) вычисления максимальных значений перегрузочной способности по крутящему моменту второй муфты для вычисления максимального значения перегрузочной способности по крутящему моменту второй муфты, которое является максимальным значением крутящего момента, которое может выделяться второй муфте (4) при запуске двигателя (2), посредством вычитания минимального значения нижнего предельного крутящего момента при запуске двигателя, которое является минимальным значением нижнего предельного крутящего момента при запуске двигателя, которое минимально требуется для проворачивания, из верхнего предельного крутящего момента электромотора,
при этом средство (S7) выделения перегрузочной способности по передаточному крутящему моменту выполнено с возможностью:
- максимизировать выделение значения команды управления перегрузочной способностью по передаточному крутящему моменту второй муфты (4), когда значение команды управления крутящим моментом приведения в движение равно или меньше максимального значения перегрузочной способности по крутящему моменту второй муфты, и
- увеличивать выделение значения команды управления перегрузочной способностью по передаточному крутящему моменту первой муфты по мере того, как возрастает скорость изменения значения команды управления крутящим моментом приведения в движение, когда значение команды управления крутящим моментом приведения в движение превышает максимальное значение перегрузочной способности по крутящему моменту второй муфты.
2. Устройство управления муфтой для гибридного транспортного средства по п. 1, в котором:
средство (S7) выделения перегрузочной способности по передаточному крутящему моменту выполнено с возможностью увеличения выделения значения команды управления перегрузочной способностью по передаточному крутящему моменту первой муфты по мере того, как возрастает скорость нажатия педали акселератора, когда величина открытия позиции педали акселератора превышает предварительно определенную величину открытия позиции педали акселератора.
3. Устройство управления муфтой для гибридного транспортного средства по п. 2, содержащее:
средство (S74) вычисления нижнего предельного крутящего момента при запуске двигателя для вычисления нижнего предельного крутящего момента при запуске двигателя, который минимально требуется для проворачивания при текущей частоте вращения двигателя, на основе частоты вращения двигателя и того, произошла ли уже или нет начальная детонация в двигателе; и
средство (S76) вычисления верхних предельных значений перегрузочной способности по крутящему моменту второй муфты для вычисления верхнего предельного значения перегрузочной способности по крутящему моменту второй муфты, которое может выделяться второй муфте, посредством вычитания нижнего предельного крутящего момента при запуске двигателя из верхнего предельного крутящего момента электромотора,
при этом:
средство (S7) выделения перегрузочной способности по передаточному крутящему моменту выполнено с возможностью:
- задавать значение, ограничивающее верхний предел значения команды управления крутящим моментом приведения в движение верхним предельным значением перегрузочной способности по крутящему моменту второй муфты в качестве значения команды управления перегрузочной способностью по передаточному крутящему моменту второй муфты, и
- задавать значение, полученное посредством вычитания значения команды управления перегрузочной способностью по передаточному крутящему моменту второй муфты из верхнего предельного крутящего момента электромотора, в качестве значения команды управления перегрузочной способностью по передаточному крутящему моменту первой муфты, когда значение команды управления крутящим моментом приведения в движение равно или меньше максимального значения перегрузочной способности по крутящему моменту второй муфты, и
- задавать значение, полученное посредством уменьшения верхнего предельного значения перегрузочной способности по крутящему моменту второй муфты, чтобы корректировать значение, ограничивающее верхний предел значения команды управления крутящим моментом приведения в движение верхним предельным значением перегрузочной способности по крутящему моменту второй муфты по мере того, как возрастает скорость нажатия педали акселератора, в качестве значения команды управления перегрузочной способностью по передаточному крутящему моменту второй муфты, и
- задавать значение, вычитая значение команды управления перегрузочной способностью по передаточному крутящему моменту второй муфты из верхнего предельного крутящего момента электромотора, в качестве значения команды управления перегрузочной способностью по передаточному крутящему моменту первой муфты, когда значение команды управления крутящим моментом приведения в движение превышает максимальное значение перегрузочной способности по крутящему моменту второй муфты.
| JP 2012131497 A, 12.07.2012 | |||
| JP 2009227277 A, 08.10.2009 | |||
| JP 2010111144 A, 20.05.2010 | |||
| US 2002019290 A1, 14.02.2002. |

