Изобретение относится к техническим системам видеонаблюдения, применяемым для контроля обстановки на охраняемой территории, например на участках государственной границы, с целью определения наличия и местоположения посторонних объектов в зоне наблюдения.
Из уровня техники известны автоматизированные (аппаратно-программные) системы и способы оптико-электронного наблюдения, предназначенные для использования в различных сферах. Наиболее часто такие системы используются для решения научно-исследовательских задач, в области обеспечения охраны объектов и безопасности, мониторинга окружающей среды, контроля движения транспорта.
Известна «Система охраны периметра и территории» (см. патент RU №2447459, МПК G01S 17/06, опубл. 10.04.2012 г.), предназначенная для определения наличия и местоположения посторонних объектов в охраняемых зонах, например на железных дорогах. Система содержит, по крайней мере, одну выносную телевизионную камеру с оптической системой и приемником излучения, центральный пост с анализатором изображения, источник электромагнитного излучения (ЭМИ), направленный на охраняемую зону, ретрорефлекторы электромагнитного излучения, установленные вдоль охраняемой зоны. Длина волны источника ЭМИ находится в пределах спектральной характеристики приемника излучения телевизионной камеры, ретрорефлекторы размещены в поле зрения телевизионной камеры так, чтобы объект проникновения в охраняемую зону при своем перемещении перекрывал не менее одного из пучков излучения, падающих на каждый ретрорефлектор от источника ЭМИ. Эффект обнаружения постороннего объекта достигается при ориентировании поля зрения телевизионной камеры вдоль линии установки ретрорефлекторов. Недостатками данной системы являются ограниченность охраняемой территории в направлении, перпендикулярном ее периметру, при ориентировании поля зрения телевизионной камеры перпендикулярно линии установки ретрорефлекторов возможно перемещение постороннего объекта без перекрытия пучков излучения источника ЭМИ и соответственно не обнаружение объекта, находящегося в охраняемой зоне.
Известна «Многозоновая стационарно-передвижная система контроля за движением автотранспортных средств» (см. патент RU №2137203, МПК G08G 1/01, G08G 1/017, опубл. 10.09.1999 г.). Система включает передвижной контрольный пункт, множество стационарных зон контроля, каждая из которых представляет собой условный прямоугольник, охватывающий определенный локальный участок дороги, коммутационные устройства, установленные около дороги на заданном расстоянии от указанного прямоугольника. В каждой зоне контроля установлены видеокамеры, светильники, разделитель полос и направлений движения. Система также содержит аппаратно-программный комплекс, установленный на передвижном контрольном пункте. Комплекс включает компьютеры идентификации транспортного средства, с которыми посредством коммутационных устройств соединяются на определенное время видеокамеры, сервер для управления и поиска транспортных средств в базе данных, локальную вычислительную сеть, систему видеонаблюдения, соединяемую с видеокамерой через коммутационное устройство, систему телефонной связи, систему телекоммуникационной связи. Недостатками данной системы являются ограниченность контролируемых зон (камеры установлены неподвижно и имеют ограниченный угол обзора), статичность камер.
Известен «Способ наблюдения за территорией» (см. патент RU №2147161, МПК H04N 7/00, опубл. 27.03.2000 г.) в широком диапазоне по размеру площади, включающий размещение видеокамеры на снаряде нарезного орудия и перпендикулярно его оси, осуществление выстрела с движением снаряда по фиксированным траекториям с приземлением снаряда в намеченных точках земной поверхности, которые оснащают амортизаторами в виде засыпки, извлечение записанной информации и изучение ее. Недостатком способа является отсутствие возможности получение информации с видеокамеры в режиме реального времени.
Известен «Оптико-электронный модуль большой дальности «ФОКУС-Д» (см. патент RU №2427006, МПК G01S 17/66, опубл. 20.08.2011 г.), представляющий собой пассивную комбинированную систему скрытого круглосуточного наблюдения за наземной и/или надводной обстановкой на дальности до 20 км в пределах прямой видимости, в том числе обнаружения и распознавания объектов наблюдения с удаленного рабочего места оператора. Оптико-электронный модуль содержит приборный блок, установленный на платформе. Платформа закреплена на опорно-поворотном устройстве, выполненном с возможностью вращения в азимутальной и угломестной плоскостях. В корпусе приборного блока расположены охлаждаемый тепловизор большой дальности действия и цветная видеокамера. Сочетание в одной системе оптико-электронных средств (тепловизора и видеокамеры), работающих в различных диапазонах спектра, позволяет обнаруживать и распознавать объекты (цели) как днем, так и ночью. Для наблюдения объектов днем используется видеокамера, а ночью - тепловизор. После развертывания оптико-электронный модуль «Фокус-Д» по умолчанию устанавливается в режим работы с видеокамерой. Для перехода в режим работы с тепловизором необходимо произвести соответствующее переключение режима работы. Недостатками оптико-электронного модуля являются отсутствие возможности отображения на рабочем месте оператора видеоинформации одновременно с видеокамеры и тепловизора и, как следствие, отсутствие возможности синхронного наблюдения за обстановкой на контролируемой территории одновременно с помощью видеокамеры и тепловизора, что может затруднять обнаружение и распознавание объектов наблюдения, например, применяющих средства маскировки или передвигающихся скрытно, прячась в траве, кустарнике и т.п.
Известен «Способ защиты линейного участка границы» (см. патент RU №2460142, МПК G08B 13/196, опубл. 27.08.2012 г.), реализуемый в системе защиты линейного участка границы, включающей компьютер, к которому подключены видеокамеры, оборудованные лазерами подсветки, и тепловизоры. Видеокамеры и тепловизоры установлены с чередованием вдоль границы на столбах заграждения. На столбах заграждения установлены также вибрационные средства обнаружения, содержащие чувствительные элементы и блоки обработки сигналов. Лазеры подсветки выполнены с возможностью работы в диапазоне невидимого спектра. Способ защиты линейного участка границы заключается в том, что постоянно осуществляют контроль состояния систем, отвечающих за безопасность границы, в том числе подсистемы сбора и обработки информации, подсистемы видеонаблюдения при помощи видеокамер, подсистемы видеонаблюдения при помощи тепловизоров, осуществляют подсветку при помощи лазеров подсветки и визуальную информацию с тепловизоров и видеокамер передают на компьютер и отображают на мониторе. Недостатком способа защиты линейного участка границы является отсутствие автоматического приведения к одному масштабу выводимых на мониторе видеоизображений с тепловизоров и видеокамер. Общеизвестно (Тарасов В.В., Якушенков Ю.Г. Инфракрасные системы «смотрящего» типа. - М.: Логос, 2004. - 444 с., стр.93), что в силу различных физических принципов построения оптических систем тепловизора и видеокамеры они обладают отличающимися друг от друга зависимостями масштаба наблюдаемого объекта на видеоизображении от расстояния до этого объекта. Поэтому в известном способе защиты линейного участка границы изображения на мониторе одного и того же объекта с тепловизора и видеокамеры будут иметь различные размеры, и степень различия будет изменяться в зависимости от расстояния до объекта. Такой способ представления визуальной информации усложняет восприятие видеоизображений, получаемых с тепловизоров и видеокамер, затрудняет проведение их анализа в реальном масштабе времени и может приводить к принятию ошибочных решений и снижению надежности обнаружения и распознавания объектов наблюдения.
В основу настоящего изобретения положена техническая задача увеличения надежности обнаружения и распознавания объектов при наблюдении их круглосуточно (днем и ночью) в реальном масштабе времени путем создания мультиспектральной системы и способа оптико-электронного наблюдения охраняемой территории.
Указанная техническая задача решена за счет того, что предложенная мультиспектральная система оптико-электронного наблюдения (СОЭН) охраняемой территории, содержащая автоматизированное рабочее место (АРМ) оператора и модуль оптико-электронный (МОЭ), включающий в себя устройство опорно-поворотное (УОП) и блок оптико-электронный (БОЭ), согласно настоящему изобретению содержит в составе МОЭ блок управления (БУ), состоящий из контроллера, видеосервера и устройства корректировки видеоизображения.
Блок оптико-электронный установлен и закреплен на платформе устройства опорно-поворотного, выполненного с возможностью вращения в двух плоскостях: азимутальной и угломестной, что позволяет использовать БОЭ в режиме непрерывного кругового обзора. В блоке оптико-электронном находятся телевизионная камера (ТК) и тепловизор (ТП) для обнаружения и распознавания объектов как днем, так и ночью благодаря возможности наблюдения охраняемой территории одновременно в видимом и инфракрасном спектральных диапазонах электромагнитного излучения. ТК и ТП оборудованы трансфокаторами и обеспечивают возможность их одновременного нацеливания на выбранный участок охраняемой территории. При выполнении нацеливания ТК и ТП используется контроллер блока управления. На вход контроллера поступают команды управления от АРМ оператора. Принимаемые контроллером команды преобразуются им в сигналы управления, которые передаются по линиям связи в устройство опорно-поворотное и в телевизионную камеру, в результате чего производится поворот БОЭ в нужном направлении и нацеливание ТК на выбранный участок охраняемой территории. Текущие значения параметров трансфокации ТК считываются контроллером и преобразуются им в сигнал управления, который поступает далее в тепловизор для наведения и установки его поля зрения в положение, обеспечивающее вывод на мониторе АРМ оператора видеоизображения с ТП одновременно и в одном масштабе с видеоизображением ТК.
Видеоинформация с ТК и ТП поступает в блок управления на устройство корректировки видеоизображения, которое осуществляет его улучшение, используя алгоритмы, устраняющие негативное влияние вибраций ТК и ТП, термальных эффектов и тумана. После корректировки видеоинформация обрабатывается видеосервером, оснащенным алгоритмами видеоанализа, позволяющими автоматически распознавать нарушения и внештатные ситуации. Видеосервер передает в компьютер АРМ оператора видеоинформацию и структурированное описание происходящих действий в форме мета-данных.
АРМ оператора состоит из процессорного блока (компьютера), монитора и пульта оператора. Функционирование процессорного блока осуществляется при помощи загруженного в него программного средства «АРМ_оператора_СОЭН». Процессорный блок вырабатывает команды управления наведением ТК и ТП на заданный участок охраняемой территории, которые передаются в БУ по отдельной линии связи. Выработка команд управления может осуществляться как в автоматическом, так и в ручном режимах. В автоматическом режиме процессорный блок использует информацию о координатах объекта наблюдения, поступающую от внешних охранных устройств, таких как средства обнаружения, радар и т.п. В ручном режиме используется специализированный пульт оператора, подключенный к процессорному блоку. Указание координат объекта наблюдения в ручном режиме осуществляется с помощью манипулятора, например типа «джойстик», расположенного на пульте оператора. Видеоинформация с ТК и ТП вместе с мета-данными поступает в процессорный блок с видеосервера и отображается на экране монитора, который подключен к процессорному блоку проводной линией связи.
Техническая задача решена также за счет того, что предложен способ оптико-электронного наблюдения охраняемой территории, в соответствии с которым постоянно осуществляют видеонаблюдение территории с помощью телевизионной камеры и тепловизора, видеоинформацию с которых передают в АРМ оператора и отображают на экране монитора, при этом согласно изобретению производят автоматическое приведение к одному масштабу, выводимых на мониторе видеоизображений с телевизионной камеры и тепловизора.
Сущность изобретения поясняется с помощью чертежей, показанных на фиг.1-3.
На фиг.1 показана структурная схема мультиспектральной системы оптико-электронного наблюдения охраняемой территории.
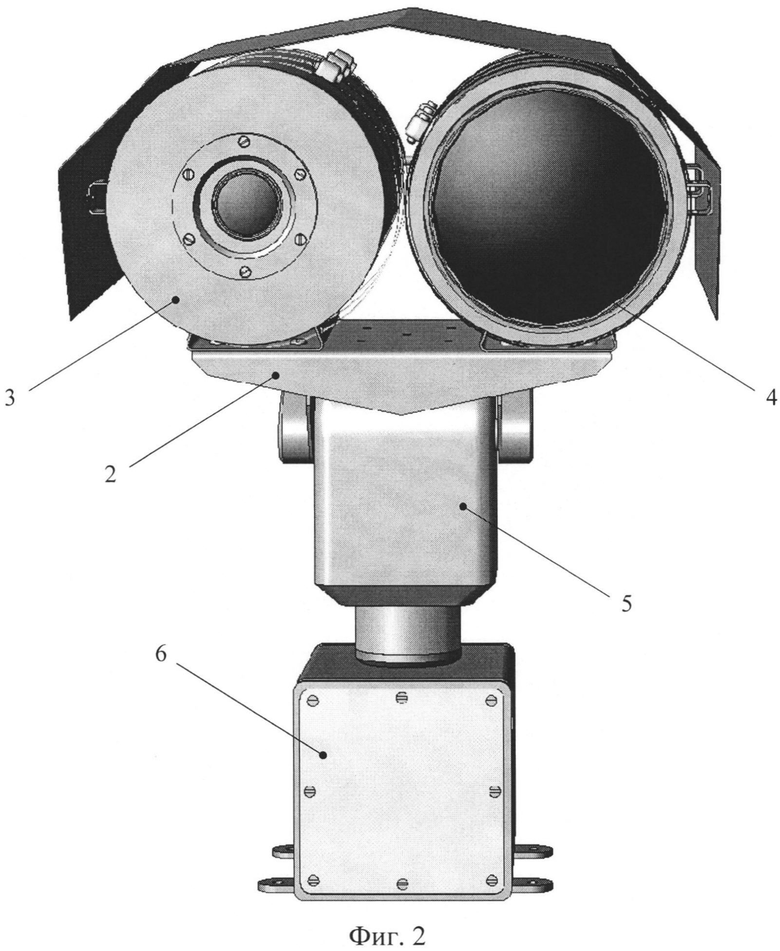
На фиг.2 показан общий вид модуля оптико-электронного.
На фиг.3 показан пример отображения видеоинформации с телевизионной камеры и тепловизора на экране монитора.
На фиг.1-3 использованы следующие обозначения:
1 - модуль оптико-электронный;
2 - блок оптико-электронный;
3 - телевизионная камера;
4 - тепловизор;
5 - устройство опорно-поворотное;
6 - блок управления;
7 - контроллер;
8 - видеосервер;
9 - устройство корректировки видеоизображения;
10 - автоматизированное рабочее место оператора;
11 - компьютер;
12 - пульт оператора;
13 - монитор;
14 - линия связи телевизионной камеры с устройством корректировки видеоизображения;
15 - линия связи тепловизора с устройством корректировки видеоизображения;
16 - линии связи телевизионной камеры с контроллером;
17 - линия связи контроллера с устройством опорно-поворотным;
18 - линия связи тепловизора с контроллером;
19 - линия связи компьютера с контроллером;
20 - линия связи компьютера с видеосервером;
21 - линия связи видеосервера с устройством корректировки видеоизображения;
22 - линия связи компьютера с монитором;
23 - линия связи компьютера с пультом оператора;
24 - линия связи компьютера с внешним устройством;
25 - видеоизображение с телевизионной камеры на экране монитора;
26 - видеоизображение с тепловизора на экране монитора.
Однотипные устройства обозначены на чертежах одинаковыми позициями.
Мультиспектральная система оптико-электронного наблюдения состоит из взаимосвязанных устройств модуля оптико-электронного 1 и АРМ оператора 10, соединенных электрически по правилам, известным в данной области техники, как показано на фиг.1. В модуль оптико-электронный 1 входит блок оптико-электронный 2, устройство опорно-поворотное 5 и блок управления 6 (см. фиг.2). БОЭ 2 установлен на платформе, жестко связанной с устройством опорно-поворотным 5, которое в свою очередь закрепляется на корпусе БУ 6. Корпус БУ 6 обеспечивает возможность его крепления на внешних устройствах и снабжен разъемными соединителями для подключения к БОЭ 2, УОП 5 и организации связи между МОЭ 1 и АРМ оператора 10. В блоке оптико-электронном 2 размещены телевизионная камера 3 и тепловизор 4. Оптические системы ТК 3 и ТП 4 выполнены по схеме с переменным фокусным расстоянием. БОЭ 2, размещенный на УОП 5, имеет возможность вращаться в двух плоскостях (азимутальной и угломестной) в пределах допустимых углов поворота. В результате вращения оптические оси ТК 3 и ТП 4 перемещаются в пространстве и имеют возможность занимать положение, требуемое для обнаружения или распознавания объектов. Управление приводом УОП 5 для поворота БОЭ 2 в требуемом направлении и наведение ТК 3 и ТП 4 на заданный участок охраняемой территории осуществляется с помощью команд управления, поступающих из АРМ оператора 10 в блок управления 6 по линии связи 19. В состав БУ 6 входит контроллер 7, видеосервер 8 и устройство корректировки видеоизображения 9. Команды управления от АРМ оператора 10 поступают в контроллер 7, который после их обработки передает по линии связи 17 в УОП 5 сигнал управления приводом для поворота БОЭ 2 в требуемом направлении, а по линии связи 16 - сигнал управления наведением ТК 3 на заданный участок охраняемой территории. Наведение ТК 3 на заданный участок осуществляется путем изменения параметров трансфокации, при этом текущие значения этих параметров считываются по линии связи 16 контроллером 7. Схема контроллера 7 реализована на базе процессора, в память которого занесена таблица соответствия угловых размеров поля зрения ТП 4 значениям параметров трансфокации ТК 3, при которых обеспечивается приведение к одному масштабу видеоизображений с ТК 3 и ТП 4. Такая таблица определяется эмпирически и заносится в память процессора при изготовлении контроллера 7. На основе считываемых значений параметров трансфокации ТК 3 и согласно таблице соответствия контроллер 7 вырабатывает сигнал управления наведением ТП 4 на заданный участок охраняемой территории и передает его в ТП 4 по линии связи 18. Получаемая с помощью ТК 3 и ТП 4 видеоинформация поступает по линиям связи 14 и 15 в устройство корректировки видеоизображения 9, далее по линии связи 21 на вход видеосервера 8, а с выхода видеосервера 8 по линии связи 20 подается в АРМ оператора 10.
АРМ оператора 10 состоит из компьютера 11, монитора 13 и пульта оператора 12. Видеоинформация, поступающая с видеосервера 8, обрабатывается компьютером 11 и визуализируется на подключенном к нему линией связи 22 мониторе 13, как показано на фиг.3. Команды управления для контроллера 7 формируются компьютером 11. АРМ оператора 10 может управлять МОЭ 1 в автоматическом и ручном режимах.
При работе в автоматическом режиме используется информация от внешних устройств, которая принимается компьютером 11 по линии связи 24. В качестве внешнего устройства может использоваться средство обнаружения нарушителя, радар, охранный извещатель и т.п. На основе информации от такого устройства компьютер 11 определяет местоположение объекта наблюдения и вырабатывает команду управления для МОЭ 1, содержащую параметры ориентирования БОЭ 2 в азимутальной и угломестной плоскостях и наведения ТК 3 и ТП 4 на определенное расстояние в выбранном направлении. На экране монитора 13 автоматически появляются видеоизображения с ТК 3 и ТП 4 заданного участка охраняемой территории.
При работе в ручном режиме используется пульт оператора 12, который подключается к компьютеру 11 по линии связи 23. Пульт оператора 12 снабжен клавиатурой и манипулятором типа «джойстик». В ручном режиме оператор наблюдает видеоизображения с ТК 3 и ТП 4 на экране монитора 13 и, используя клавиатуру и манипулятор пульта оператора 12, изменяет параметры ориентирования БОЭ 2 и наведения ТК 3 и ТП 4. Новые параметры передаются компьютером 11 в МОЭ 1, и соответствующие им видеоизображения с ТК 3 и ТП 4 появляются на экране монитора 13.
Мультиспектральная система оптико-электронного наблюдения охраняемой территории работает следующим образом.
Для обеспечения максимальной эффективности использования МОЭ 1 он устанавливается на открытых площадках на высотах (5 м и выше), обеспечивающих наибольшую дальность прямой видимости до объектов. МОЭ 1 закрепляют с помощью болтового соединения БУ 6 к прочному металлическому основанию опоры, выбранной для установки МОЭ 1. После закрепления МОЭ 1 производят подключение электрических цепей при выключенном электропитании. Подают электропитание в систему, производят контроль исправности ее оборудования и организуют круглосуточное дежурство сменных операторов за монитором 13 АРМ оператора 10.
После включения системы АРМ оператора 10 по умолчанию устанавливается в автоматический режим работы. Для переключения режима из автоматического в ручной, и обратно используется соответствующая электронная клавиша пульта оператора 12.
При работе в автоматическом режиме компьютер 11 ожидает прихода по линии связи 24 тревожного сигнала от внешнего устройства об обнаружении постороннего объекта на охраняемой территории. При поступлении такого сигнала компьютер 11 направляет в МОЭ 1 по линии связи 19 команду управления, в соответствии с которой производится автоматическое наведение ТК 3 и ТП 4 на тревожный участок охраняемой территории. Видеоинформация с ТК 3 и ТП 4 в реальном времени передается по линиям связи 14 и 15 сначала в БУ 6 и далее по линии связи 20 в компьютер 11 и одновременно и в одном масштабе отображается на экране монитора 13, предоставляя оператору возможность контроля обстановки на охраняемой территории путем наблюдения и сравнительного анализа двух видеоизображений 25 и 26 (телевизионного и тепловизионного) тревожного участка.
При работе в ручном режиме оператор, наблюдая видеоизображения 25 и 26 с ТК 3 и ТП 4 на экране монитора 13 и используя пульт оператора 12, управляет с помощью манипулятора поворотом УОП 5 в азимутальной и угломестной плоскостях и наведением ТК 3 и ТП 4 на определенное расстояние в выбранном направлении. Текущие значения параметров ориентирования УОП 5 и наведения ТК 3 и ТП 4 считываются с пульта оператора 12 компьютером 11 и передаются в составе команды управления по линии связи 19 в МОЭ 1, в соответствии с которой производится наведение ТК 3 и ТП 4 на заданный участок охраняемой территории. Текущая видеоинформация с ТК 3 и ТП 4 в реальном времени передается по линиям связи 14 и 15 сначала в БУ 6 и далее по линии связи 20 в компьютер 11 и одновременно и в одном масштабе отображается на экране монитора 13, предоставляя оператору возможность контроля обстановки на охраняемой территории путем наблюдения и сравнительного анализа двух видеоизображений 25 и 26 (телевизионного и тепловизионного) выбранного участка.
Применение мультиспектральной системы и способа оптико-электронного наблюдения охраняемой территории позволяет:
- повысить надежность обнаружения и распознавания объектов при наблюдении их круглосуточно (днем и ночью) в реальном масштабе времени;
- ускорить процесс сбора и обработки данных, их анализа и принятия решения;
- улучшить эргономические показатели рабочего места оператора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оптико-электронного наблюдения охраняемой территории на основе предзаписи изображений с телевизионной камеры | 2020 |
|
RU2743319C1 |
| СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ И СПОСОБ ФОРМИРОВАНИЯ ВИДЕОИЗОБРАЖЕНИЯ | 2016 |
|
RU2625097C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ТЕХНИЧЕСКИХ СРЕДСТВ ОХРАНЫ | 2010 |
|
RU2427039C1 |
| КОМПЛЕКС ОХРАНЫ МЕСТНОСТИ С ПРИМЕНЕНИЕМ БЕСПИЛОТНОГО ВОЗДУШНОГО СРЕДСТВА | 2024 |
|
RU2834502C1 |
| Система охраны открытых участков местности | 2018 |
|
RU2692962C1 |
| ОПТОЭЛЕКТРОННАЯ СИСТЕМА АНАЛИЗА ВНЕШНЕЙ ОБСТАНОВКИ НА ОСНОВЕ МАШИННОГО ЗРЕНИЯ | 2019 |
|
RU2735559C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОХРАНЫ ТЕРРИТОРИЙ С МАЛОКАДРОВОЙ СИСТЕМОЙ ВИДЕОНАБЛЮДЕНИЯ И ОПТИМАЛЬНОЙ ЧИСЛЕННОСТЬЮ СИЛ ОХРАНЫ | 2015 |
|
RU2595532C1 |
| Автономный мобильный пост оптико-электронного наблюдения | 2022 |
|
RU2835147C2 |
| МОБИЛЬНАЯ СТАНЦИЯ ВИДЕОМОНИТОРИНГА И СВЯЗИ | 2008 |
|
RU2398353C2 |
| КОМПЛЕКС ТЕХНИЧЕСКОГО НАБЛЮДЕНИЯ ЗА ОХРАНЯЕМОЙ ТЕРРИТОРИЕЙ | 2013 |
|
RU2542873C1 |

Изобретение относится к техническим системам видеонаблюдения для контроля обстановки на охраняемой территории. Система содержит автоматизированное рабочее место оператора и оптико-электронный модуль, который включает в себя опорно-поворотное устройство, телевизионную камеру, тепловизор и блок управления. В блок управления входит контроллер, устройство корректировки видеоизображения и видеосервер. Принимаемые контроллером команды передаются в опорно-поворотное устройство и в телевизионную камеру для наведения на заданный участок территории, а текущие значения параметров трансфокации телевизионной камеры считываются для управления тепловизором. На основе полученных параметров контроллер формирует сигнал для наведения тепловизора и установки его поля зрения в положение, обеспечивающее вывод на мониторе оператора видеоизображения с тепловизора в одном масштабе с видеоизображением телевизионной камеры. Технический результат - увеличение надежности обнаружения и распознавания объектов. 3 ил.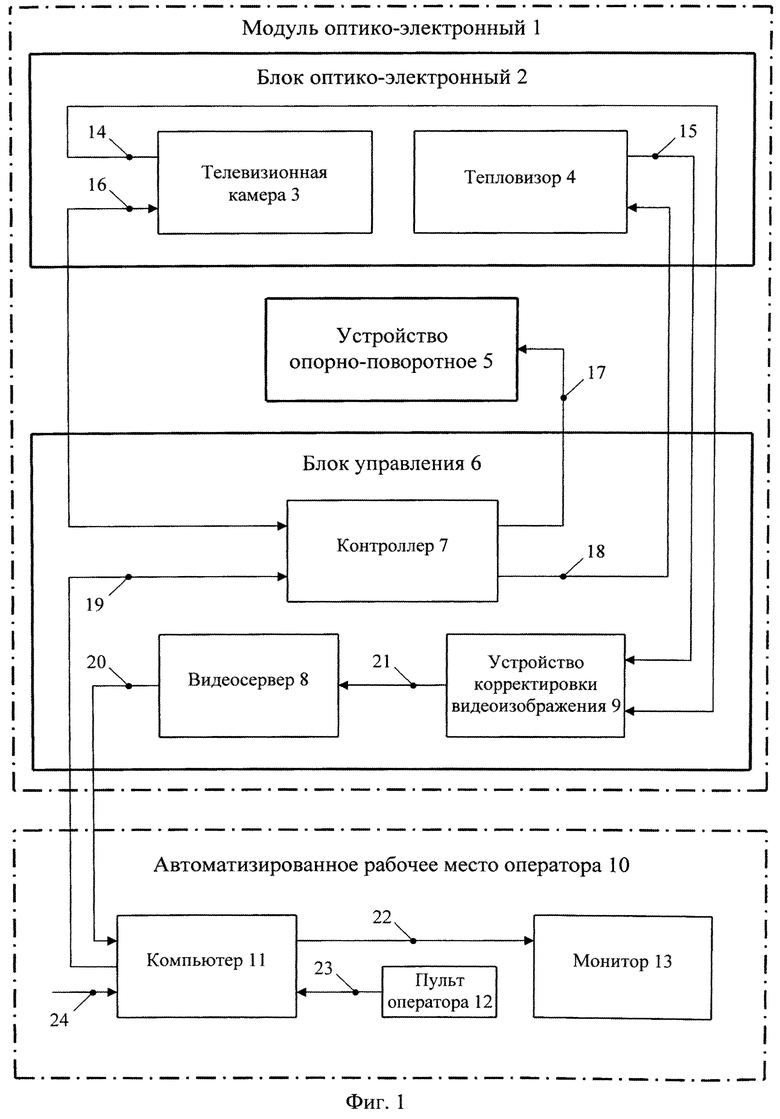
Мультиспектральная система оптико-электронного наблюдения охраняемой территории, содержащая автоматизированное рабочее место (АРМ) оператора и модуль оптико-электронный, включающий в себя блок оптико-электронный с телевизионной камерой и тепловизором, устройство опорно-поворотное и блок управления, отличающаяся тем, что в блок управления входит контроллер и устройство корректировки видеоизображения, при этом устройство корректировки видеоизображения подключается к телевизионной камере и тепловизору и осуществляет улучшение видеоизображений, используя алгоритмы, устраняющие негативное влияние вибраций телевизионной камеры и тепловизора, термальных эффектов и тумана, а контроллер соединен линией связи с АРМ оператора для приема команд управления, которые передаются им по линиям связи в опорно-поворотное устройство и в телевизионную камеру, и текущие значения параметров трансфокации телевизионной камеры считываются контроллером для управления тепловизором с целью наведения и установки его поля зрения в положение, обеспечивающее вывод на мониторе АРМ оператора видеоизображения с тепловизора в одном масштабе с видеоизображением телевизионной камеры.
| ОПТИКО-ЭЛЕКТРОННЫЙ МОДУЛЬ БОЛЬШОЙ ДАЛЬНОСТИ "ФОКУС-Д" | 2009 |
|
RU2427006C2 |
| US 7538326 B2, 26.05.2009 | |||
| US 2009294666 A1, 03.12.2009 | |||
| Устройство для изменения шага винта | 1943 |
|
SU67529A1 |

