Изобретение относится к техническим системам обнаружения, использующих комбинации систем, в т.ч. системы видеонаблюдения для контроля круглосуточного контроля обстановки на охраняемой территории объекта, а именно к системам пространственного ориентирования оператора стационарной мультиспектральной системы оптико-электронного наблюдения, которая осуществляет наблюдение за объектом посредством одновременной регистрации оптических волн различных спектральных диапазонов.
Из патента РФ №2563557 известен принятый за прототип способ оптико-электронного наблюдения охраняемой территории, заключающийся в том, что постоянно осуществляют видеонаблюдение территории с помощью телевизионной камеры и тепловизора, видеоинформацию с которых передают в автоматизированное рабочее место оператора (АРМ оператора) и отображают на экране монитора, при наведении телевизионной камеры на заданный участок охраняемой территории производят считывание текущих значений ее параметров трансфокации, на основе которых выполняют автоматическую установку поля зрения тепловизора в положение, обеспечивающее приведение к одному масштабу, выводимых одновременно в реальном времени на мониторе АРМ оператора двух видеоизображений - с телевизионной камеры и тепловизора.
Общими существенными признаками прототипа, совпадающими с существенными признаками предлагаемого изобретения являются следующие - способ оптико-электронного наблюдения охраняемой территории, заключающийся в постоянном осуществлении видеонаблюдения территории с помощью моторизированных телевизионной камеры и тепловизора, передаче видеоинформации в автоматизированное рабочее место оператора (АРМ оператора) с отображением на экране монитора; считывании текущих значений параметров трансфокации при наведении телевизионной камеры на заданный участок охраняемой территории, автоматической установке тепловизора на основе текущих значений параметров трансфокации в положение, обеспечивающее приведение к одному масштабу выводимых в реальном времени на мониторе АРМ оператора двух видеоизображений.
Прототип обладает широкими возможностями наблюдения за участками контроля в условиях достаточной оптической видимости (при прозрачности атмосферы более 80%), светлого времени суток и достаточно высокого температурного контраста цели и подстилающей поверхности в зоне наблюдения (не менее 1°С). Однако, в случае пониженного температурного контраста в темное время суток, плохой оптической видимости (вызванной, например осадками в виде дождя, снега или тумана) усложняется работа оператора, появляются сложности в пространственном ориентировании, что, в свою очередь, не позволяет достаточно точно и своевременно определить место, на которое нацелены оптические каналы системы. Указанный недостаток может привести к потере наблюдаемой цели или сложности ее термографического обнаружения в темное время суток, в особенности при наблюдении за протяженными рубежами, когда приходится непрерывно вращать опорно-поворотную платформу, изменять фокусы телевизионного (ТВ) и тепловизионного (ТП) модулей.
Предлагаемое изобретение направлено на решение следующей технической задачи
- обеспечение точности пространственного ориентирования (достаточно точного определения места, на которое наведены оптические каналы системы).
Для этого в способе оптико-электронного наблюдения охраняемой территории, заключающемся в постоянном осуществлении видеонаблюдения территории с помощью моторизированных телевизионной камеры и тепловизора, передаче видеоинформации в автоматизированное рабочее место оператора (АРМ оператора) с отображением на экране монитора; считывании текущих значений параметров трансфокации при наведении телевизионной камеры на заданный участок охраняемой территории, автоматической установке тепловизора на основе текущих значений параметров трансфокации в положение, обеспечивающее приведение к одному масштабу выводимых в реальном времени на мониторе АРМ оператора двух видеоизображений, в отличие от прототипа, до начала рабочего режима наблюдения производят эталонную предварительную запись на телевизионную камеру изображений контролируемой территории в благоприятных визуальных условиях с различными параметрами направления и трансфокации - α - углом наклона плоскости механизма поворота (опорно-поворотной платформы (ОПП)), β - азимутом (0° ≤ β ≤ 360°), γ - углом зрения по горизонтали телевизионной камеры (ТВ) и δ - углом зрения по горизонтали тепловизионной камеры (ТП), со считыванием и программной привязкой текущих значений всех этих параметров к предварительной записи изображений, передают данные изображения с параметрами направления и трансфокации в автоматизированное рабочее место оператора, где их сохраняют; во время рабочего режима наблюдения при возникновении недостаточного уровня показаний получаемого изображения (ограниченной видимости и(или) незначительного теплового контраста) вместо изображения телевизионной камеры на экран монитора оператора выводят соответствующее по параметрам направления и трансфокации сохраненное эталонное изображение наблюдаемой территории.
Благодаря предварительной эталонной по качеству записи изображений с ТВ, при возникновении сложных погодных условий - ограниченной видимости и(или) незначительного теплового контраста оператор может сориентироваться в каком конкретно месте контролируемой территории происходит событие (проникновение, пожар, перемещение и т.п), что позволяет ему на основе понимания расположения предмета принимать правильные решения.
Предлагаемый способ улучшенного пространственного ориентирования на основе предзаписи изображений с ТВ может использоваться для реализации оптических систем наблюдения (ОСН) с различными комбинациями оптическо-электронных каналов с различными спектральными диапазонами, объединенных на едином конструктиве ОПП. Способ может быть использован для охраны различных территориально-распределенных объектов - границы государства, периметров объектов топливо-энергетического комплекса, военных полигонов и т.д., где требуется круглосуточное всепогодное наблюдение. Предлагаемое способ может дополнять систему ориентирования ОСН по к электронной карте местности по координатам места установки, по углам видимости объективов и/или азимуту угла наклона опорно-поворотной платформы. Способ улучшенного пространственного ориентирования оператора может применяться, как в случае использования таких электронных карт, так и самостоятельно.
Сущность способа улучшенного пространственного ориентирования оператора ОСН, пример компоновки соответствующей ОСН и сравнительные результаты ее работы показаны на фиг. 1-5.
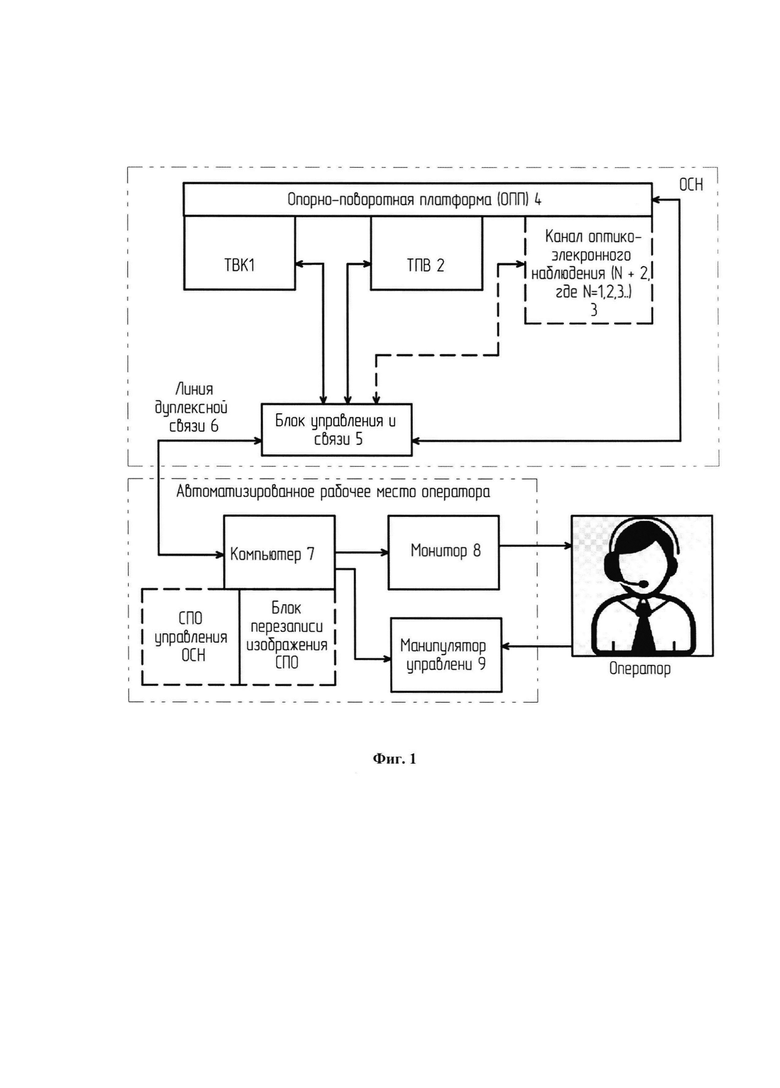
На фиг. 1 показана структурная схема ОСН, реализованной по предлагаемому способу улучшенного пространственного ориентирования оператора ОСН (построенная по примеру схемы прототипа);
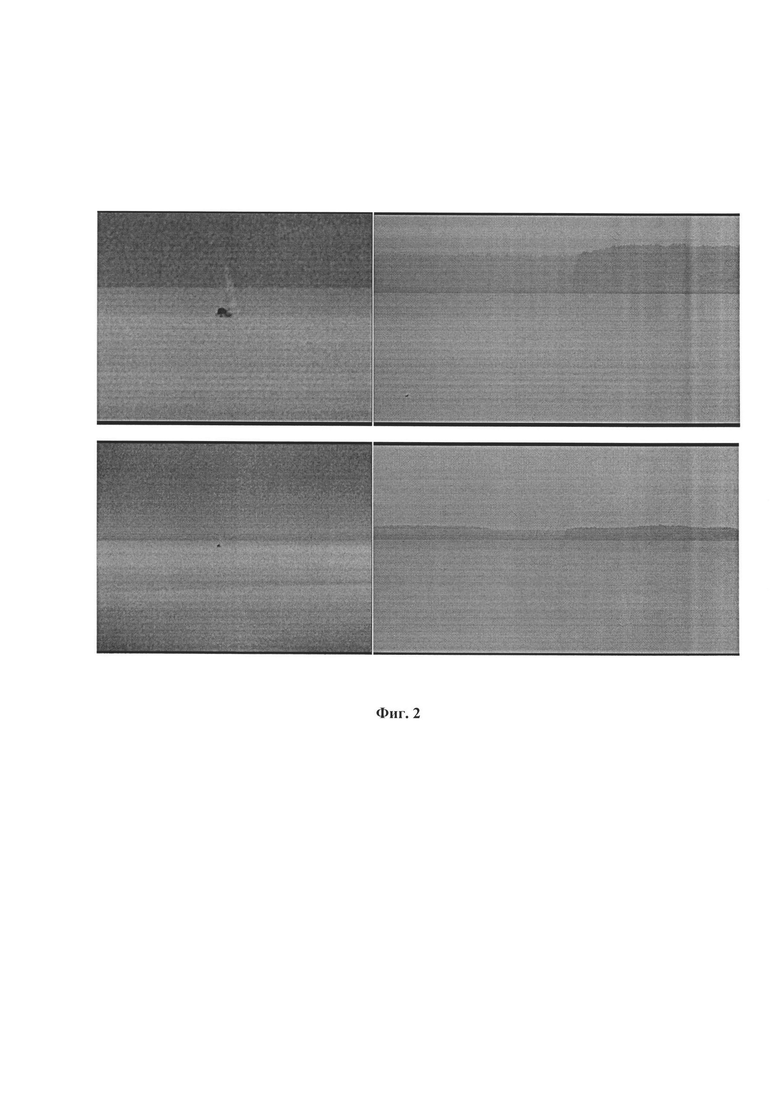
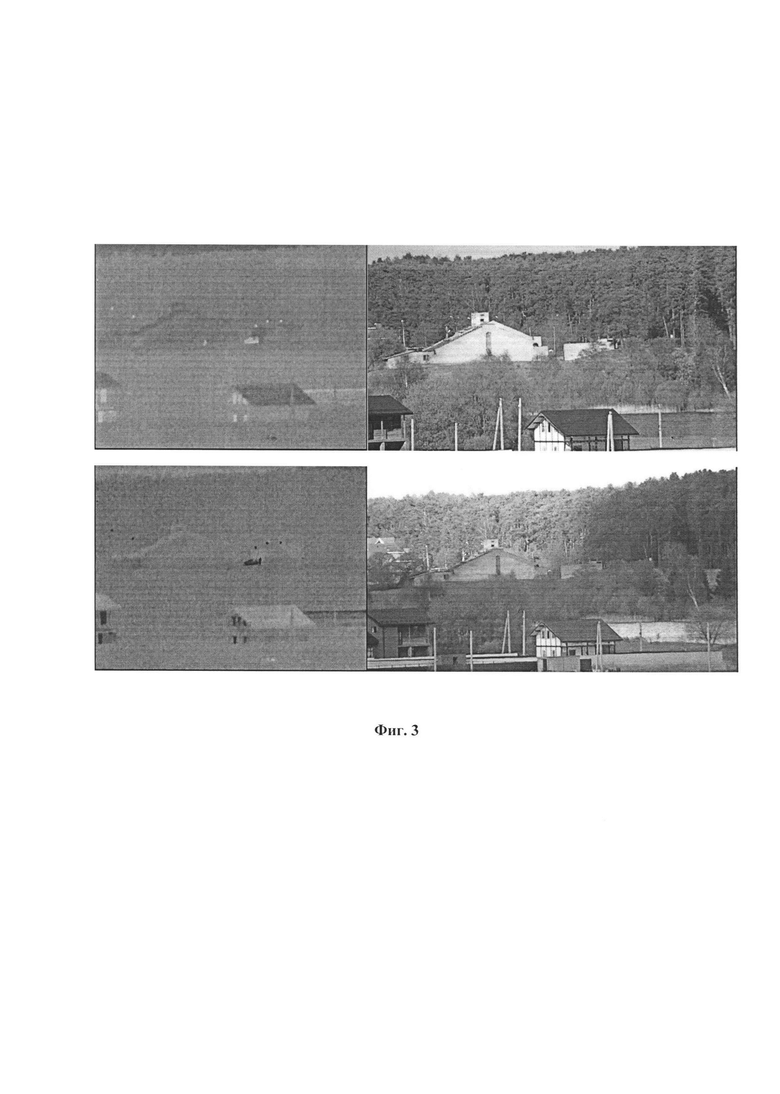
На фиг. 2 и фиг. 3 показаны примеры ТВ и ТП изображений в режиме пространственного ориентирования по предзаписи ТВ с единым масштабом изображений ТВ и ТП модулей при разных углах раскрытия объективов на примере одного наблюдаемого объекта;
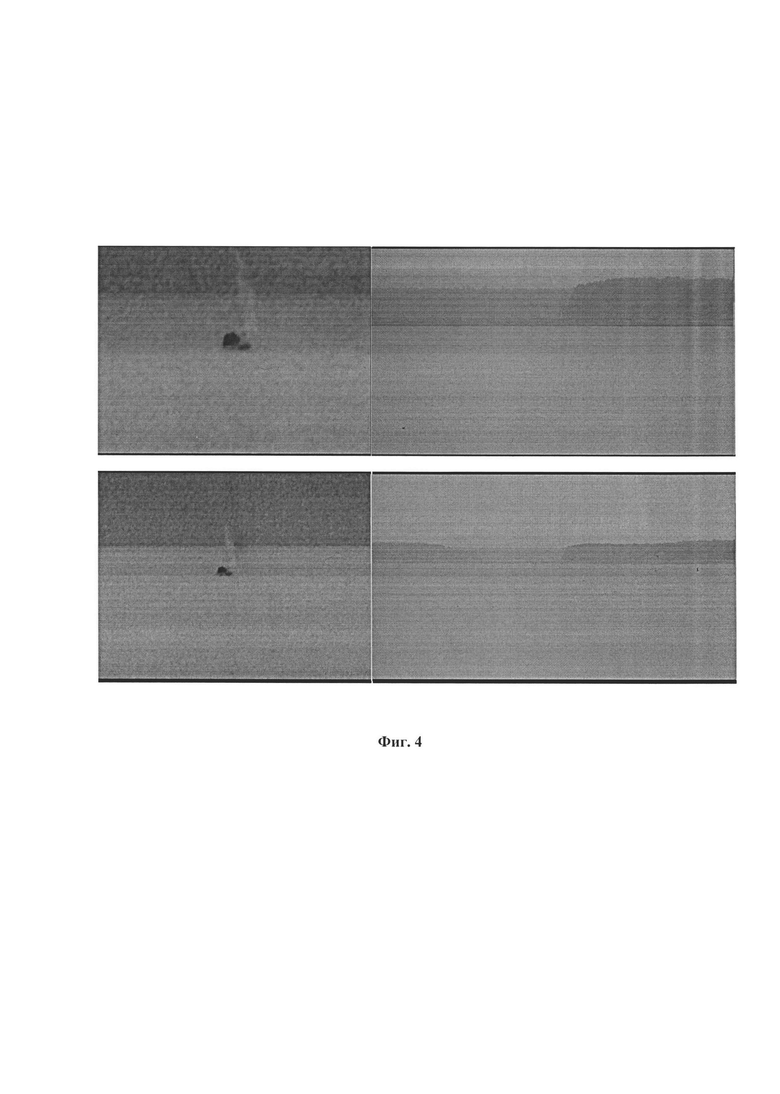
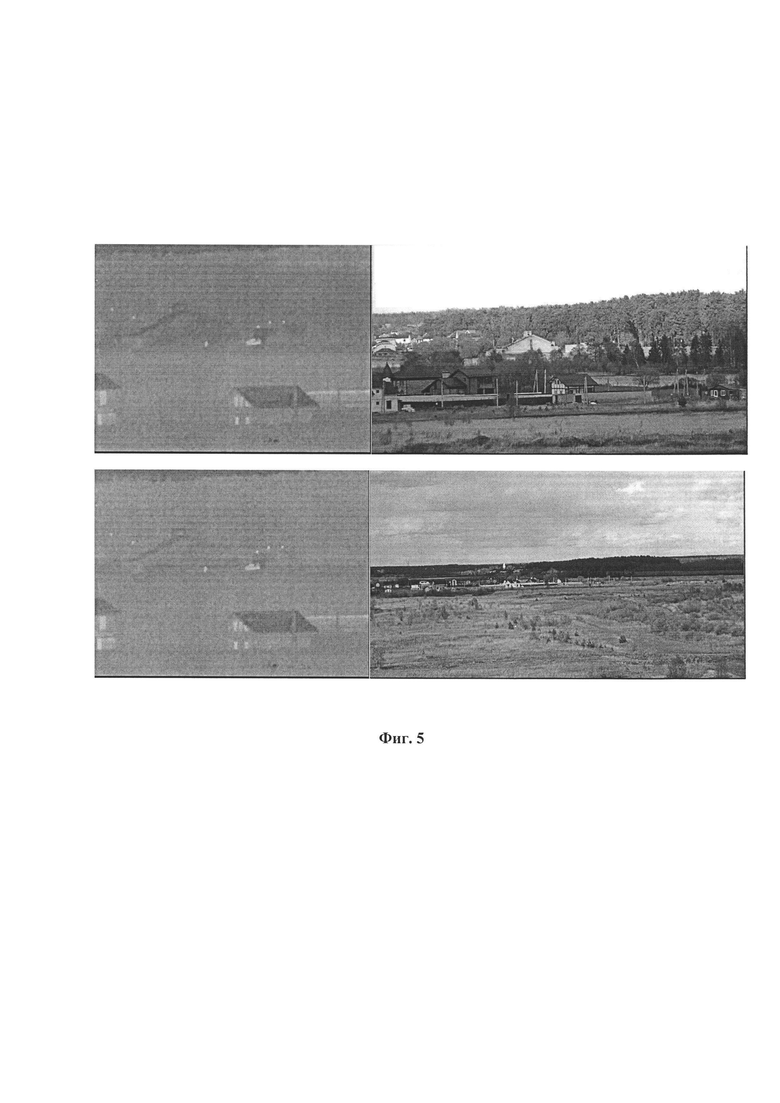
На фиг. 4 и фиг. 5 показаны примеры изображений в режиме пространственного ориентирования по предзаписи ТВ с различным масштабом изображений ТВ и ТП при разных углах зрения (положениях трансфокатора) на примере одного наблюдаемого объекта.
На фиг. 1 обозначены:
1 - телевизионная камера с объективом-трансфокатором (ТВ);
2 - тепловизионный модуль с объективом-трансфокатором (ТП);
3 - канал оптико-электронного наблюдения N+2, где N=1, 2, 3…;
4 - опорно-поворотная платформа (ОПП);
5 - блок управления и связи ОСН;
6 - линия питания и связи;
7 - компьютер АРМ оператора;
8 - монитор АРМ оператора;
9 - пульт управления АРМ оператора.
На фиг. 1 изображена структурная схема ОСН реализованная по предлагаемому способу улучшенного пространственного ориентирования оператора (построенная по примеру схемы прототипа), ОСН состоит из устройств ТВ 1 и ТП 2, которые находятся на одной ОПП 4 в единой конструкции корпуса с возможными другими дополнительными каналами наблюдения 3, соединенных электрически между собой через блок управления и связи 5. Блок управления и связи 5 по линии дуплексной связи обеспечивает возможность передачи видео-информации и сигналов управления к компьютеру АРМ оператора 7. АРМ оператора состоит из компьютера 7, монитора 8 и пульта управления АРМ оператора 9.
На компьютере АРМ оператора 7 происходит обработка и хранение поступающей информации (команд управления, параметрических показателей компонентов ОСН, изображений) от ОСН через специальное программное обеспечение (СПО). СПО включает в себя программный модуль управления ОСН и блок предзаписи эталонных изображений. Блок предзаписи изображений выполняет функции хранения, записи и воспроизведения эталонных изображений по команде оператора. Оператор с АРМ может управлять ОСН в ручном режиме используется пульт управления 9, который подключается к компьютеру 7 и снабжен клавиатурой, мышкой и манипулятором типа «джойстик». В обычном режиме (по примеру прототипа) оператор наблюдает видеоизображения с ТВ 1 и ТП 2 на экране монитора 8 в режиме реально времени и, используя клавиатуру и манипулятор пульта оператора 9, изменяет параметры наклона «горизонтальной» оси ОПП 4 относительно земной поверхности и углом зрения ТВ 1 и ТП 2.
На фиг. 2 приведены примеры изображений с ОСН в режиме пространственного ориентирования с подключенной эталонной записью изображения с ТВ 1 в едином масштабе с живым изображением с ТП 2. При этом, примеры изображений вверху и внизу приведены с ОСН при разных углах раскрытия объективов ТВ 1 и ТП 2 на примере наблюдаемого объекта с контролируемой территории. На левом верхнем изображении приведена наблюдаемая цель в виде плав средства на фоне акватории по каналу ТП с углом зрения 8°, а на правом верхнем эталонная предзапись участка акватории по каналу ТВ 1 с углом зрения 8°. На левом нижнем изображении приведена наблюдаемая цель в виде плав средства на фоне акватории по каналу ТП 2 с углом зрения 20°, а на правом нижнем эталонная предзапись участка акватории по каналу ТВ 1 с углом зрения 20°. Так по эталонной предварительной записи можно установить, что плав средство находится напротив залива.
На фиг. 3 приведены примеры изображений с ОСН в режиме пространственного ориентирования с подключенной эталонной записью изображения с ТВ 1 в едином масштабе с живым изображением с ТП 2. При этом, примеры изображений вверху и внизу приведены с ОСН при разных углах раскрытия объективов ТВ 1 и ТП 2 на примере наблюдаемого объекта с контролируемой территории. На левом верхнем изображении приведена наблюдаемая цель в виде транспортного средства на фоне строения в режиме отображения теплый-черный по каналу ТП 2 с углом зрения 4°, а на правом верхнем эталонная предзапись участка местности со строением по каналу ТВ 1 с углом зрения 4°. На левом нижнем изображении приведена наблюдаемая цель в виде транспортного средства на фоне строения в режиме отображения теплый-белый по каналу по каналу ТП 2 с углом зрения 4°, а на правом нижнем эталонная предзапись участка местности со строением по каналу ТВ 1 с углом зрения 4°. Так по эталонной предварительной записи можно установить, что транспортное средство находится рядом с конкретным строением.
На фиг. 4 приведены примеры изображений с ОСН в режиме пространственного ориентирования с подключенной эталонной записью изображения с ТВ 1 с различным масштабом отображения, по сравнению с живым изображением с ТП 2. При этом, примеры изображений вверху и внизу приведены с ОСН при разных углах раскрытия объективов ТВ 1 и ТП 2 на примере наблюдаемого объекта с контролируемой территории. На левом верхнем изображении приведена наблюдаемая цель в виде плав средства на фоне акватории по каналу ТП 2 с углом зрения 3°, а на правом верхнем эталонная предзапись участка акватории по каналу ТВ 1 с углом зрения 8°. На левом нижнем изображении приведена наблюдаемая цель в виде плав средства на фоне акватории по каналу по каналу ТП 2 с углом зрения 8°, а на правом нижнем эталонная предзапись участка акватории по каналу ТВ 1 с углом зрения 16°.
На фиг. 5 приведены примеры изображений с ОСН в режиме пространственного ориентирования с подключенной эталонной записью изображения с ТВ 1 с различным масштабом отображения, по сравнению с живым изображением с ТП 2. При этом, примеры изображений вверху и внизу приведены с ОСН при разных углах раскрытия объективов ТВ 1 и ТП 2 на примере наблюдаемого объекта с контролируемой территории. На левом верхнем изображении приведена наблюдаемая цель в виде транспортного средства на фоне строения по каналу ТП 2 с углом зрения 4°, а на правом верхнем эталонная предзапись участка местности со строением по каналу ТВ 1 с углом зрения 8°. На левом нижнем изображении приведена наблюдаемая цель в виде транспортного средства на фоне строения по каналу по каналу ТП 2 с углом зрения 4°, а на правом нижнем эталонная предзапись участка местности со строением по каналу ТВ 1 с углом зрения 20°.
Способ оптико-электронного наблюдения охраняемой территории реализуется следующим образом. Оператор АРМ в начальные дни работы с ОСН или при смене климатического сезона, в светлое время суток в условиях и период хорошей оптической видимости, запускает режим сканирования и записи окружающей обстановки ОСН через манипулятор 9, подключенный к компьютеру 7. ОСН в режиме сканирования передает изображение окружающей обстановки и данные об угле α наклона ОПП 4, азимуте β и углах раскрытия γ объективов ТВ 1 и δ ТП 2 по линии связи 6 на АРМ, где СПО по заранее заданному алгоритму осуществляет архивирование изображений с ТВ 1 с привязкой (маркировкой) каждого «опорного» кадра к углу α наклона ОПУ 4, азимуту β и углам раскрытия γ объективов ТВ 1 и 5 ТП 2.
У оператора АРМ после окончания предзаписи и создания «маркированной» базы данных эталонных изображений окружающей обстановки, появляется возможность в любой момент времени вместо или параллельно онлайн (живому) изображению с ТВ 1, выводить на экран монитора 8 АРМ соответствующие «маркированные» кадры. Это, в свою очередь, позволяет оператору наблюдать окружающую обстановку в случаях ограниченной видимости или низкого теплового контраста наблюдаемых целей и окружающей среды (подстилающей поверхности), примеры такого отображения показаны на фиг. 2-3.
В отличие от прототипа, предлагаемый способ предусматривает и возможность оператору АРМ эксплуатировать ОСН и без приведения к единому масштабу изображений ТВ 1 и ТП 2. В случае выбора такого режима, подобная функция позволяет оператору ОСН ориентироваться на окружающей местности без приведения в реальном времени изображений от TB 1 и ТП 2, и записанного эталонного изображения от ТВ 1 к единому масштабу, примеры такого отображения показаны на фиг. 4-5.
Также возможна реализация способа и на мультиспектральной ОСН с дополнительными каналами оптико-электронного наблюдения 3 (например SWIR коротковолнового ИК-диапазона), когда во время рабочего режима наблюдения оператор АРМ при возникновении недостаточного уровня показаний получаемых с ТВ 1 (как наиболее информативного для человеческого глаза) канала ОСН на экран монитора вызывает соответствующее по параметрам направления и трансфокации сохраненное эталонное изображение наблюдаемой территории с ТВ 1, при этом, информация с ТП 2 канала и дополнительного каналама оптико-электронного наблюдения 3 продолжает поступать в онлайн (живом) режиме.
Применение способа оптико-электронного наблюдения охраняемой территории позволяет:
- повысить надежность обнаружения и распознавания объектов при наблюдении их в реальном масштабе времени в случае пониженного температурного контраста в темное время суток или плохой оптической видимости (вызванной, например осадками в виде дождя, снега или тумана);
- ускорить процесс пространственного ориентирования, что, в свою очередь, позволяет достаточно точно и своевременно определить место, на которое нацелены оптические каналы ОСН;
- снизить вероятность потери наблюдаемой цели в темное время суток или плохой оптической видимости;
- повысить эффективность работы оператора ОСН.
| название | год | авторы | номер документа |
|---|---|---|---|
| МУЛЬТИСПЕКТРАЛЬНАЯ СИСТЕМА И СПОСОБ ОПТИКО-ЭЛЕКТРОННОГО НАБЛЮДЕНИЯ ОХРАНЯЕМОЙ ТЕРРИТОРИИ | 2014 |
|
RU2563557C2 |
| Оптико-электронный комплекс для оптического обнаружения, сопровождения и распознавания наземных и воздушных объектов | 2020 |
|
RU2760298C1 |
| СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ И СПОСОБ ФОРМИРОВАНИЯ ВИДЕОИЗОБРАЖЕНИЯ | 2016 |
|
RU2625097C1 |
| КОМПЛЕКС ТЕХНИЧЕСКОГО НАБЛЮДЕНИЯ ЗА ОХРАНЯЕМОЙ ТЕРРИТОРИЕЙ | 2013 |
|
RU2542873C1 |
| Оптико-электронный комплекс для оптического обнаружения, сопровождения и распознавания наземных и воздушных объектов | 2019 |
|
RU2701177C1 |
| СИСТЕМА ОХРАНЫ ПЕРИМЕТРА И ТЕРРИТОРИИ | 2010 |
|
RU2447459C1 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| Автономный мобильный пост оптико-электронного наблюдения | 2022 |
|
RU2835147C2 |
| Способ формирования объектов имитируемой модели фоноцелевой обстановки на необитаемой территории ледового пространства | 2021 |
|
RU2816461C2 |
| Мобильный тепловизионный комплекс | 2022 |
|
RU2809472C1 |
Изобретение относится к техническим системам обнаружения, использующим комбинации систем, в т.ч. системы видеонаблюдения для контроля круглосуточного контроля обстановки на охраняемой территории объекта. Технический результат заключается в обеспечении точности пространственного ориентирования. Для этого в способе оптико-электронного наблюдения охраняемой территории, в отличие от прототипа, до начала рабочего режима наблюдения производят эталонную предварительную запись на телевизионную камеру изображений контролируемой территории в благоприятных визуальных условиях с различными параметрами направления и трансфокации со считыванием и программной привязкой текущих значений всех этих параметров к предварительной записи изображений. Данную информацию передают в автоматизированное рабочее место оператора, где ее сохраняют. Во время рабочего режима наблюдения при возникновении недостаточного уровня показаний получаемого изображения вместо изображения телевизионной камеры на экран монитора оператора выводят соответствующее по параметрам направления и трансфокации сохраненное эталонное изображение наблюдаемой территории. 5 ил.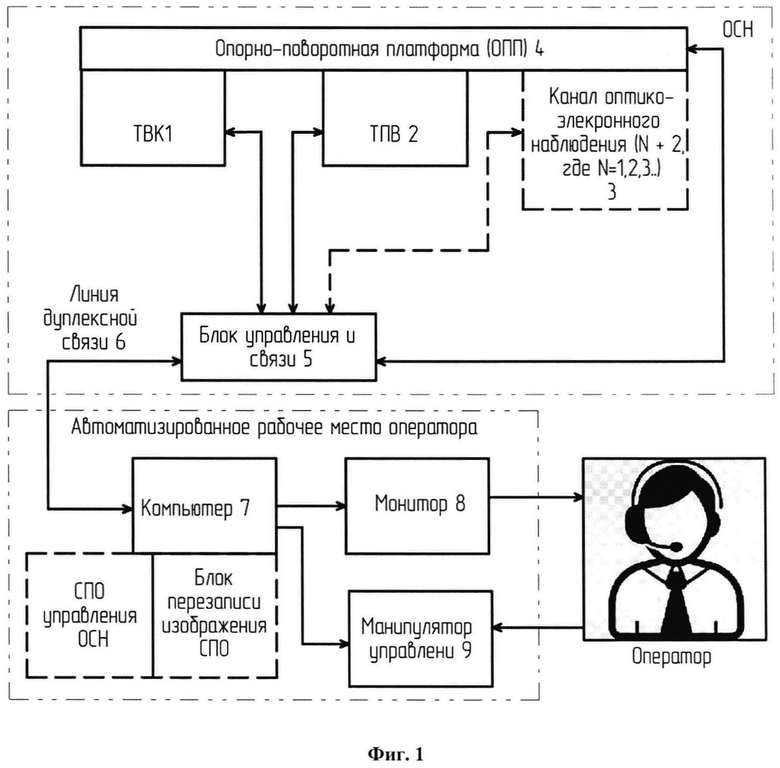
Способ оптико-электронного наблюдения охраняемой территории, заключающийся в постоянном осуществлении видеонаблюдения территории с помощью моторизированных телевизионной камеры и тепловизора, передаче видеоинформации в автоматизированное рабочее место оператора с отображением на экране монитора; считывании текущих значений параметров трансфокации при наведении телевизионной камеры на заданный участок охраняемой территории, автоматической установке тепловизора на основе текущих значений параметров трансфокации в положение, обеспечивающее приведение к одному масштабу выводимых в реальном времени на мониторе автоматизированного рабочего места оператора двух видеоизображений, отличающийся тем, что до начала рабочего режима наблюдения производят эталонную предварительную запись на телевизионную камеру изображений контролируемой территории в благоприятных визуальных условиях с различными параметрами направления и трансфокации - α - углом наклона плоскости механизма поворота, β - азимутом, γ - углом зрения по горизонтали телевизионной камеры и δ - углом зрения по горизонтали тепловизионной камеры, со считыванием и программной привязкой текущих значений всех этих параметров к предварительной записи изображений, передают данные изображения с параметрами направления и трансфокации в автоматизированное рабочее место оператора, где их сохраняют; во время рабочего режима наблюдения при возникновении недостаточного уровня показаний получаемого изображения вместо изображения телевизионной камеры на экран монитора оператора выводят соответствующее по параметрам направления и трансфокации сохраненное эталонное изображение наблюдаемой территории.
| АВТОНОМНЫЙ ПОСТ ТЕХНИЧЕСКОГО НАБЛЮДЕНИЯ И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2018 |
|
RU2703167C1 |
| СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ И СПОСОБ ФОРМИРОВАНИЯ ВИДЕОИЗОБРАЖЕНИЯ | 2016 |
|
RU2625097C1 |
| CN 208768193 U, 19.04.2019 | |||
| CN 109974860 A, 05.07.2019. | |||

