Искусственная мышца
Изобретение относится к области бионического протезирования, а именно к искусственным мышцам, представляющим собой композиционные материалы, способные сокращаться под воздействием слабых электрических импульсов. Искусственная мышца может быть использована в медицине как составная часть бионических конечностей или же как самостоятельный имплантат, а также в робототехнике при производстве высокоточных манипуляторов.
Широко известна проблема создания материалов, по химическому сродству и механическим свойствам близких к живому мышечному волокну, посредством которого происходит движение в теле человека или животного. На данный момент разработано несколько видов искусственных мышц, однако на пути использования каждого из них возникает ряд проблем, касающихся стоимости материалов и ограниченности использования.
Известна гидравлическая искусственная мышца, включающая первый соединитель с закрытым концом, эластичную резиновую трубку, сплетенные нити высокопрочного волокна, обвитые вокруг упомянутой трубки, второй соединитель с закрытым концом, через который в трубку поступает вода, два кольцеобразных зажима, расположенных по краям мышцы, два кольцеобразных зажима, расположенных в средней части мышцы, и два крепежных элемента в форме конуса, обращенного внутрь мышцы (CN 103395072 A, A61F 2/50, 20.11.2013). Описанная мышца имеет очень ограниченную применимость: ее использование возможно только в робототехнике, основанной на гидравлических системах.
Известна искусственная мышечная ткань, представляющая собой углеродные нанотрубки, пропитанные воском и скрученные по спирали (журнал Sciense, том 338, страницы 928-932, 16.11.2012).
Описанная искусственная мышечная ткань способна поднять вес, превосходящий ее собственный в сто тысяч раз, однако она имеет очень высокую стоимость и при этом отличается повышенной чувствительностью к факторам окружающей среды: перепады температуры или микротоки способны привести к ее непроизвольному сокращению.
Наиболее близким аналогом заявленной искусственной мышцы является нейлоновое или полиэтиленовое волокно, скрученное по спирали (http://nauka21vek.ru/archives/56843, 26.02.2014).
Преимущества данного волокна заключаются в его способности быстро сокращаться при нагревах, а также его низкой стоимости, однако вместе с этим оно имеет ряд недостатков. Наравне с его восприимчивостью к нагревам оно не способно полноценно сокращаться под воздействием слабых электрических импульсов, таких как нервные. В связи с этим для создания протезов конечностей возникает необходимость применять усилители и преобразователи электрического сигнала в тепловой, что, в свою очередь, требует использования источников питания (батареек, аккумуляторов). Повышенная чувствительность волокна к температуре окружающей среды может привести к непроизвольному сокращению мышц и, соответственно, движению искусственной конечности. В связи с этим возникает необходимость использовать теплоизоляторы. Вышеперечисленные условия усложняют конструкцию и себестоимость протеза, а также создают неудобства в использовании.
Задачей предложенного изобретения является создание безвредной и недорогой искусственной мышцы, способной воспринимать нервные импульсы или импульсы, аналогичные им.
Техническим результатом предложенного изобретения является обеспечение малого времени отклика и возможности быстрого сокращения под действием электрических импульсов, в частности, с плотностью тока до 20 мА/см2, исключение возможности бесконтрольного сокращения под действием температуры окружающей среды и придание искусственной мышце свойства самовосстановления.
Технический результат достигается за счет того, что предложена искусственная мышца, содержащая нейлоновое и/или полиэтиленовое волокно, при этом она представляет собой среду из по меньшей мере одного полиорганосилоксана, по меньшей мере одной эпоксидной смолы и по меньшей мере одного катализатора полимеризации эпоксидной смолы, причем мышца прошита одной или более нитями по крайней мере одного интерметаллида с памятью формы и нейлоновым и/или полиэтиленовым волокном.
Интерметаллид с памятью формы может быть выбран из группы: Ti-Ni, Zr-Ni, Fe-Mn-Si и сплав Гейслера. Эффект памяти формы у перечисленных интерметаллидов является наиболее выраженным. Кроме того, Fe-Mn-Si является наиболее дешевым, Ti-Ni - наиболее распространенным и изученным, Zr-Ni имеет высокую ответную реакцию на электрические импульсы.
Для дополнительного упрочнения, придания мышце сглаженных и более прямолинейных движений она может быть дополнительно прошита нитями эластомера.
Для увеличения амплитуды сокращения искусственной мышцы под действием электрического импульса желательно, чтобы нейлоновое и/или полиэтиленовое волокно было скручено по спирали.
Для увеличения реакции мышцы на импульс тока и придания точности движения желательно, чтобы одна или более нитей по крайней мере одного интерметаллида с памятью формы были скручены по спирали.
Для дополнительного увеличения скорости сокращения искусственной мышцы, более плавного начала и конца ее сокращения под действием электрического импульса, а также для снижения внутреннего трения желательно, чтобы одна или более нитей по крайней мере одного интерметаллида с памятью формы были скручены с нейлоновым и/или полиэтиленовым волокном по спирали вокруг друг друга.
Для повышения сцепления одна или более нитей по крайней мере одного интерметаллида с памятью формы и нейлоновое и/или полиэтиленовое волокно могут быть соединены со средой из по меньшей мере одного полиорганосилоксана посредством склеивания или высокотемпературного нагрева с последующим охлаждением.
В качестве катализатора полимеризации эпоксидной смолы можно использовать катализатор Граббса, который является наиболее доступным и распространенным.
Для дополнительного упрочнения, увеличения скорости сокращения под действием тока и улучшения восприимчивости к слабым токовым импульсам искусственная мышца может быть дополнительно прошита волокном углеродных нанотрубок.
В случае соприкосновения нескольких искусственных мышц для уменьшения трения между ними желательно, чтобы на поверхность искусственной мышцы был нанесен слой из полиметилсилоксана.
Для того чтобы сократить стоимость искусственной мышцы при сохранении высокой прочности и скорости реагирования на электрические импульсы, она может иметь следующее содержание компонентов, мас. %:
Полиорганосиликаны имеют ряд преимуществ по сравнению с другими имитаторами живых тканей. Изделия из них являются наиболее безвредными и долговечными, имеют очень низкую температуру стеклования (около -130°C), способны копировать и сохранять заданный им внешний вид, а также по консистенции они близки к биологическим тканям, например натуральным мышцам.
Известен ряд материалов с памятью формы, для которых также возможен эффект самовосстановления. Одним из наиболее распространенных примеров такого материала служит интерметаллид Ni-Ti (нитинол), в котором на один атом титана приходится один атом никеля. Если выполненное из него изделие деформировать, то при нагревании оно снова примет прежнюю форму. Наравне с нагревом в виду наличия некоторого сопротивления вернуть форму изделию можно также посредством пропускания через него тока. В случае если изделие представляет собой тонкую нить, это можно сделать даже небольшим током, например до 20 мА/см2, который течет по нервным волокнам.
Запоминание своего положения при тех или иных условиях, а также возможность самовосстановления обусловлены эффектом дисклинации, при котором происходит миграция зерен на границах дефектных зон, то есть металлические дефекты обретают поля напряжений с настолько интенсивными зарядами, что края трещин сближаются и поврежденный интерметаллид регенерируется.
Было установлено, что подобным свойством могут обладать некоторые другие интерметаллиды на основе никеля, в которых второй компонент в чистом виде имеет гексагональную плотно упакованную или кубическую объемно-центрированную решетку. К таким интерметаллидам относятся Ni-Zr и Ni-V. Использование последнего в медицинских целях исключается ввиду повышенной токсичности ванадия и его соединений, однако его применение возможно в робототехнике при создании манипуляторов.
Исследование интерметаллида Ni-Zr, в котором на один атом никеля приходится один атом циркония, показало, что он способен немного быстрее реагировать на электрические импульсы, нежели нитинол (Ti-Ni), что скорее всего связано с теплопроводностью второго компонента: теплопроводность циркония при 300 K составляет 22,7 Вт/(м·К), а титана - 21,9 Вт/(м·К).
Известно проявление памяти формы под воздействием магнитного поля у интерметаллидного соединения, называемого сплавом Гейслера и имеющего следующую формулу: X2YZ, где X, Y, Z - разные металлы. Наиболее распространенным видом данного сплава является Ni2MnGa. Память формы вызывается мартенситным фазовым переходом и может также обеспечиваться электрическими импульсами, меняющими магнитное поле сплава Гейслера.
Помимо вышеперечисленных, известен также интерметаллид с памятью формы - Fe-Mn-Si, который отличается низкой стоимостью.
Также известны другие материалы с памятью формы, например такие, как интерметаллиды: Au-Cd, Cu-Zn-Al, Cu-Al-Ni, Fe-Mn-Si, Fe-Ni, Cu-Al, Cu-Mn, Co-Ni и Ni-Al. Однако в виду их слабовыраженных свойств памяти формы и самовосстановления их сложнее использовать на практике.
Таким образом, для управления бионической мышцей электрическими импульсами ее необходимо прошить нитями по крайней мере одного интерметаллида с памятью формы, при этом толщину нитей следует подбирать исходя из величины поступающих сигналов. Очевидно, что для восприятия малых нервных импульсов толщина нитей должна быть небольшой - порядка 0,02-0,5 мм. Для восприятия сильных импульсов толщина может составлять несколько миллиметров и более того.
Вместе с тем использование подобного интерметаллида без среды, которая играет роль теплоизолятора и электроизолятора (в данном случае полиорганосилоксан), приводит к чувствительности интерметаллида к температуре окружающей среды и таким образом его движение становится неконтролируемым.
Существуют материалы, способные быстро сжиматься под тепловым воздействием. Ими являются полиэтиленовое и нейлоновое волокна, отличающиеся низкой стоимостью, высокой прочностью и износостойкостью. Однако их использование в качестве искусственных мышц без нитей интерметаллидов с памятью формы приводит к ряду проблем. Ввиду небольшой электропроводности волокон слабые токовые импульсы не способны привести такие мышцы в действие без дополнительных электронных устройств. Однако в случае синхронного воздействия импульса и на интерметаллидные нити с памятью формы, и на нейлоновое и/или полиэтиленовое волокно мышцы через некоторое количество повторяющихся импульсов становятся способны сокращаться с большой амплитудой и скоростью. Это связано с цепной реакцией: первый импульс приводит к небольшому сокращению волокна, провоцирующему небольшое сжатие интерметаллида, с которым он находится в одной системе, соединенной полиорганосилоксановой средой, второй импульс уже непосредственно сжимает интерметаллид, запомнивший свое прежнее положение при токе с определенными характеристиками (сила, частота), в связи с чем волокно сокращается с большей амплитудой. С третьим и последующими импульсами искусственная мышца начинает работать с высокой скоростью и амплитудой движения. Таким образом, искусственная мышца может полноценно работать только при подаче электрического импульса и на волокно, и на интерметаллидные нити одновременно.
Прошивание искусственной мышцы нитями эластомера дополнительно упрочнит ее и позволит совершать более сглаженные и плавные движения при сохранении прочих параметров. В качестве эластомера допустимо применять различные каучуки и резины, желательно, с высокой эластичностью и сопротивлением раздиру.
Наличие в составе искусственной мышцы эпоксидной смолы наравне с катализатором ее полимеризации, например наиболее доступного катализатора Граббса, позволит мышце за короткий период времени восстановиться в случае повреждений, например механических, химических или тепловых.
При нагревании в развернутом виде нейлоновое волокно способно сокращаться лишь на 4/100, полиэтиленовое - на 3/1000. Однако в случае скручивания данных волокон по спирали нейлоновое приобретает способность сжиматься на 34/100, а полиэтиленовое - на 16/100. Этот эффект объясняется простым физическим явлением: в выпрямленном виде нить сокращается за счет увеличения ее толщины, во втором случае она сокращается и за счет увеличения ее толщины, и за счет сокращения спирали. Указанные выше значения близки к способности сокращения натуральных мышечных волокон и могут позволить их аналогу поднимать груз большой массы.
В том случае если нити интерметаллидов с памятью формы скручены по спирали, реакция искусственной мышцы на один и тот же импульс тока становится лучше: по скорости, степени сокращения и прямолинейности движений, то есть отсутствуют колебания, перпендикулярные оси прохождения спиралей интерметаллидных нитей. Скорость и степень сокращения интерметаллидов объясняются аналогичным эффектом, как в случае нейлоновых и полиэтиленовых волокон. Отсутствие перпендикулярных колебаний объясняется следующим. Движение интерметаллида в виде выпрямленной нити сложнее предсказать ввиду того, что оно определяется памятью кристаллической структуры металла лишь на сечении тонкой нити. В случае если температура в силу каких-то факторов на одном участке нити станет сильно отличаться от температуры на других участках, это может привести к некорректному движению искусственной мышцы. Вместе с тем движение интерметаллида в виде нити, скрученной по спирали, станет определяться памятью кристаллической структуры металла на всем сечении витка спирали, что способствует стабилизации и прямолинейности движений.
Если нити интерметаллидов с памятью формы будут скручены вместе с волокном по спирали вокруг друг друга, это приведет к ряду положительных эффектов, а именно: к более плавному началу и концу сокращения искусственной мышцы под действием электрического импульса, к дополнительному увеличению скорости сокращения и к снижению внутреннего трения. Поскольку чувствительные к токовому импульсу материалы реагируют на ток с различной скоростью (например, интерметаллид ввиду своей высокой электропроводности откликается на токовый импульс быстрее), их переплетение приведет к их синхронному движению, что сократит трение внутри материала и, соответственно, уменьшит его износ.
Помимо этого, стоит отметить, что вшивание нитей интерметаллида и волокна в скрученном состоянии увеличивает их сцепление с основой и таким образом во время сокращения в мышце не происходит внутреннего трения и она работает с максимальной эффективностью.
Для дополнительного улучшения сцепления, что в большей степени требуется, если нить находится в выпрямленном состоянии, ее можно соединять с полиорганосилоксановой основой, например, посредством склеивания или высокотемпературного нагрева с последующим охлаждением. В случае последнего полиорганосилоксан вначале размягчается, а при дальнейшем охлаждении срастается с нитью.
Склеивание лучше проводить клеем на основе эпоксидной смолы, которая в случае разрыва быстро полимеризуется под действием катализатора.
Искусственная мышца может быть дополнительного прошита волокном углеродных нанотрубок, которое также сокращается под действием электрических импульсов и при этом обладает высокими прочностными свойствами, реагирует на импульсы с высокой скоростью и имеет хорошую восприимчивость к слабому току. Таким образом, его наличие может несколько улучшить прочность и амплитуду сокращения мышцы, однако стоимость последней в таком случае увеличится.
Также учитывая хоть и менее, но все равно довольно высокую стоимость интерметаллидов, в особенности Ni-Ti, для удешевления искусственной мышцы при незначительной потере прочности и скорости реагирования на электрические импульсы лучше использовать мышцу следующего состава, мас. %:
Предложенная искусственная мышца может использоваться как составная часть бионических конечностей, так и служить в качестве самостоятельного имплантата, заменяющего живую мышцу. В последнем случае концы искусственных мышц можно соединять с костью посредством медицинских клеев, таких как цианоакрилатный клей, остеопласт и прочие.
В тех случаях, когда необходимо заменить лишь отдельный участок живой мышцы, ее искусственный аналог можно также склеивать с поврежденной живой мышцей, однако в такой ситуации велика вероятность ее неприживления. Такие факторы, как сокращение, тканевое дыхание мышечных волокон, постоянный обмен веществ и прочие химические процессы могут послужить причиной отторжения имплантата. В виду изложенного во время имплантации предложенную искусственную мышцу рекомендуется склеивать с костной, нежели с мышечной тканью. Таким образом, поврежденную живую мышцу можно полностью заменить искусственной, однако восстановить отдельный ее участок с помощью искусственного аналога на данном этапе весьма проблематично.
Примеры
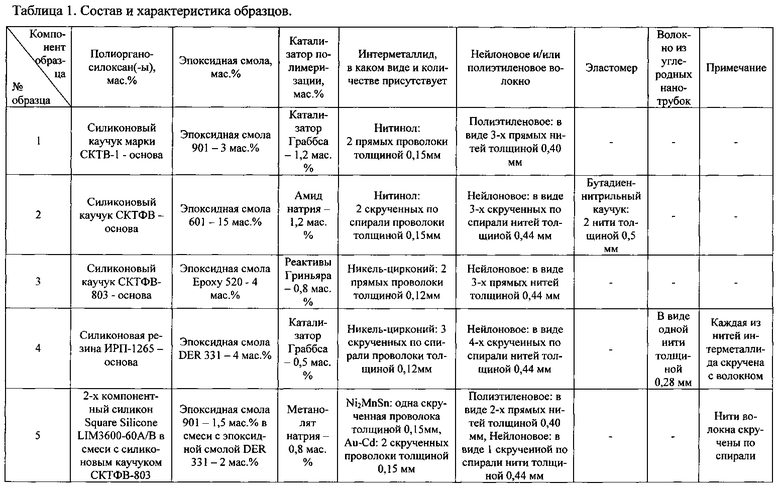
Было изготовлено 5 образцов цилиндрической формы размером 40×7 мм. Вначале произвели смешивание полиорганосилоксана, эпоксидной смолы и катализатора ее полимеризации, причем смешивание проводили в две стадии. На первой стадии при температуре его плавления в полиорганосилоксан, аккуратно помешивая его по часовой стрелке, добавили небольшое количество отвердителя полиорганосилоксана - перекись бензоила. Вслед за этим после небольшого загущения в него ввели эпоксидную смолу. Когда по мере остывания и действия отвердителя смесь стала еще более густой, продолжая ее аккуратно помешивать по часовой стрелке, на второй стадии в нее ввели катализатор полимеризации эпоксидной смолы.
Равномерное помешивание в одном направлении постепенно загущающегося полиорганосилоксана и поочередное введение эпоксидной смолы (при менее густой консистенции среды) и катализатора ее полимеризации (при более густой консистенции среды) привели к тому, что данные компоненты постепенно застыли в массе полиорганосилоксана, имея фазовое разделение между собой и в большей степени не прореагировав. При этом, поскольку смола была введена при менее густой консистенции среды, ее распространение в искусственной мышце является более обширным в отличие от катализатора полимеризации.
Практически застывшую полученную смесь загрузили в цилиндрическую форму, остудили до температуры 65°C, прошили ее насквозь вдоль оси цилиндра нитями интерметаллида, нитями эластомера, волокном из углеродных нанотрубок, нейлоновым и полиэтиленовым волокном, после чего полученную заготовку остудили до комнатной температуры, в процессе чего произошло ее доотверждение и прочная фиксация нитей в среде, и извлекли из формы. Прошивку производили либо прямой иглой, либо иглой, выполненной по спирали. Состав и характеристика образцов представлены в таблице 1.
Образцы прошили насквозь 2-мя проводками токопроводящего полимера - политиофена таким образом, что проводки имели площадь соприкосновения с каждой нитью интерметаллида, нейлоновым и/или полиэтиленовым волокном и волокном из углеродных нанотрубок.
Верхнюю часть образца со вставленными в него проводками закрепили в сдавливающем металлическом кольце, а провода из токопроводящего полимера подключили к источнику питания.
Через нижнюю часть образца продели капроновую нитку с подвешенной гирькой весом 250 г.
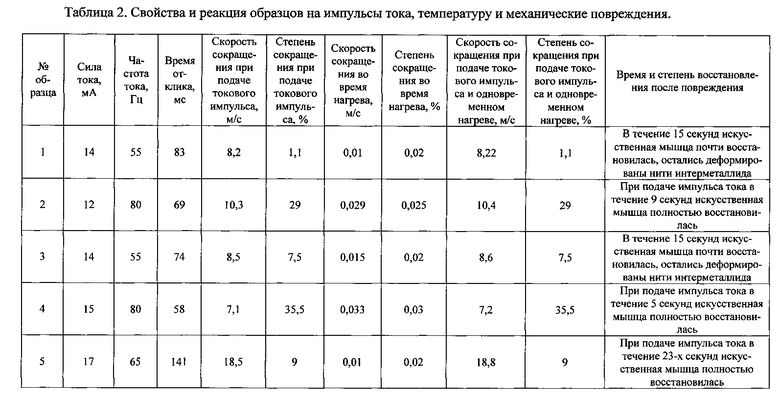
Далее на образец начали подавать ток по следующему режиму: 1,5 секунды - подача тока, 1 секунда - пауза, при этом после третьего импульса замерялись время задержки сигнала (время отклика), скорость и степень сокращения искусственной мышцы. Первые два импульса не брались в расчет, поскольку интерметаллиды еще не "запомнили" движение-сокращение.
Сделав несколько замеров, образцы обдували теплым воздухом (около 50°C) в течение 10 секунд и в это время также измеряли скорость и степень сокращения искусственной мышцы.
Также измеряли эти параметры и при одновременной подаче тока и температурном нагреве.
После этого образцам нанесли повреждения: в средней его части сделали прорезь, повредив нити и волокна. Затем 1-ый и 3-ий образцы оставили в покое, а на 2-ой, 4-ый и 5-ый начали подавать ток в третий раз по тому же режиму.
Характеристика подаваемого тока, свойства и реакции искусственной мышцы на импульсы тока, температуру окружающей среды и повреждения приведены в таблице 2.
Согласно полученным данным предложенная бионическая мышца обладает незначительным временем отклика, она способна сокращаться под действием слабых электрических импульсов, причем степень бесконтрольного сокращения под действием температуры окружающей среды настолько мала, что ею можно пренебречь.
Также предложенная мышца обладает свойством самовосстановления в короткий промежуток времени, причем при подаче токового сигнала скорость и степень восстановления увеличиваются. На скорость ответной реакции мышцы на токовые импульсы влияют такие параметры, как частота тока, а также геометрия расположения интерметаллидных нитей и волокна, если их скрутить по спирали и, даже более того, если их скрутить по спирали вокруг друг друга, то скорость реакции мышцы увеличится.
При наличии нитей эластомера все вышеописанные характеристики мышцы остаются примерно такими же, однако ее движения становятся более сглаженными.
Волокно из углеродных нанотрубок имеет незначительное влияние на скорость отклика, прочность и степень сокращения. Следовательно, его наличие не является обязательным и его можно вводить в мышцу, ориентируясь на стоимость.
С учетом того что предложенная искусственная мышца способна обеспечить достижение заявленного технического результата, можно судить о том, что вопросы со стороны миологии, касающиеся имплантации, были решены. В то же время остается вопрос со стороны неврологии, а именно касающийся подвода к мышцам токового сигнала от нерва (в том числе посредством искусственного нерва).
Поскольку почти все химические вещества, входящие в состав предложенной искусственной мышцы, являются недорогими, а самый ценный компонент - нитинол не требует большого расходования, заявленное изобретение из-за относительно невысокой стоимости также может широко применяться в робототехнике и машиностроении, например, при производстве высокоточных манипуляторов.
Изобретение относится к области бионического протезирования, а именно к искусственным мышцам, представляющим собой композиционные материалы, подверженные воздействию слабых электрических импульсов. Искусственная мышца содержит нейлоновое и/или полиэтиленовое волокно, при этом она представляет собой среду из, по меньшей мере, одного полиорганосилоксана, по меньшей мере, одной эпоксидной смолы и, по меньшей мере, одного катализатора полимеризации эпоксидной смолы. Мышца прошита одной или более нитями, по крайней мере, одного интерметаллида с памятью формы и нейлоновым и/или полиэтиленовым волокном. Технический результат заключается в обеспечении малого времени отклика и возможности быстрого сокращения под действием электрических импульсов, в частности с плотностью тока до 20 мА/см2, в исключении возможности бесконтрольного сокращения под действием температуры окружающей среды и в придании искусственной мышце свойства самовосстановления. 10 з.п. ф-лы, 2 табл.
1. Искусственная мышца, содержащая нейлоновое и/или полиэтиленовое волокно, отличающаяся тем, что она представляет собой среду из по меньшей мере одного полиорганосилоксана, по меньшей мере одной эпоксидной смолы и по меньшей мере одного катализатора полимеризации эпоксидной смолы, причем мышца прошита одной или более нитями по крайней мере одного интерметаллида с памятью формы и нейлоновым и/или полиэтиленовым волокном.
2. Искусственная мышца по п. 1, отличающаяся тем, что интерметаллид с памятью формы выбран из группы: Ti-Ni, Zr-Ni, Fe-Mn-Si и сплав Гейслера.
3. Искусственная мышца по п. 1, отличающаяся тем, что она дополнительно прошита нитями эластомера.
4. Искусственная мышца по п. 1, отличающаяся тем, что нейлоновое и/или полиэтиленовое волокно скручено по спирали.
5. Искусственная мышца по п. 1, отличающаяся тем, что одна или более нитей по крайней мере одного интерметаллида с памятью формы скручены по спирали.
6. Искусственная мышца по п. 1, отличающаяся тем, что одна или более нитей по крайней мере одного интерметаллида с памятью формы скручены с нейлоновым и/или полиэтиленовым волокном по спирали вокруг друг друга.
7. Искусственная мышца по п. 1, отличающаяся тем, что одна или более нитей по крайней мере одного интерметаллида с памятью формы и нейлоновое и/или полиэтиленовое волокно соединены со средой из по меньшей мере одного полиорганосилоксана посредством склеивания или высокотемпературного нагрева с последующим охлаждением.
8. Искусственная мышца по п. 1, отличающаяся тем, что в качестве катализатора полимеризации эпоксидной смолы используют катализатор Граббса.
9. Искусственная мышца по п. 1, отличающаяся тем, что она дополнительно прошита волокном углеродных нанотрубок.
10. Искусственная мышца по п. 1, отличающаяся тем, что на ее поверхность нанесен слой из полиметилсилоксана.
11. Искусственная мышца по п. 3, отличающаяся тем, что она имеет следующее содержание компонентов, мас. %:
| "Новая технология создания искусственных мышц", Февраль 26th, 2014,[on-line] [Найден 19.02.2015] найдено в Интернет на <URL: http://http://nauka21vek.ru/archives/56843> | |||
| ИСКУССТВЕННАЯ МЫШЦА (ВАРИАНТЫ) | 2008 |
|
RU2372056C1 |
| US 6379393 B1, 30.04.2002 | |||
| US 7612152 B2, 03.11.2009 | |||
| US 20030060569 A1, 27.03.2003 | |||
| US 5092901 A, 03.03.1992 | |||
| WO 2004035644 A2, 29.04.2004 | |||
| WO | |||

