Изобретение относится к области бионического протезирования, а именно к искусственным мышцам, представляющим собой композиционные материалы, способные сокращаться под воздействием слабых электрических импульсов. Искусственная мышца может быть использована в медицине как составная часть бионических конечностей или же как самостоятельный имплантат, а также в робототехнике при производстве экзоскелетов и высокоточных манипуляторов.
Исследователи из Института нанотехнологий Техасского университета (США) рассматривали в качестве искусственных мышц нейлоновое и полиэтиленовое волокна (http://nauka21vek.ru/archives/56843, 26.02.2014).
Исследователи из Стенфордского университета (США) разработали группу эластомеров под названием Fe-Hpdca-PDMS, которые также предлагается рассмотреть как аналог биологической мышцы. Новые эластомеры состоят из длинных, беспорядочно переплетенных полимерных цепей, содержащих кремний, кислород, азот и атомы углерода, смешанных с солями железа. Благодаря особой химической формуле эти эластомеры могут не только достаточно сильно растягиваться, но и способны «залечивать» дефекты, возникающие в процессе эксплуатации (https://scientificrussia.ru/articles/iskusstvennaya-myshtsa-lechit-samu-sebya, 21.04.2016).
Однако неясно, каким образом слабый нервный импульс может привести данные искусственные мышцы в движение.
Вместе с тем была разработана искусственная мышца, взятая за прототип, в которой данная проблема разрешилась за счет одновременной подачи нервного импульса как на нейлоновое и/или полиэтиленовое волокно, так и на ультратонкие нити интерметаллидов с памятью формы, которые помещены в среду, обладающую необходимыми физико-механическими свойствами и состоящую по меньшей мере из одного полиорганосилоксана, по меньшей мере одной эпоксидной смолы и по меньшей мере одного катализатора полимеризации эпоксидной смолы (RU 2563815 C1, A61F 2/08, 20.09.2015).
Однако описанная мышца обладает недостатками, связанными со сложностью ее изготовления, надежностью, точностью движений и длительной настройкой перед эксплуатацией. Незначительный нагрев нейлонового волокна под воздействием слабых электрических импульсов приводит к очень незначительному сжатию, и таким образом, может понадобиться длительное время на то, чтобы искусственная мышца, сопоставимая по длине с настоящей, начала полноценно сокращаться. Для повышения чувствительности необходимо использовать ультратонкое высокочистое нейлоновое и/или полиэтиленовое волокно и, соответственно, очень тонкие находящиеся с ним в одной системе нити интерметаллидов с памятью формы, что снижает прочность искусственной мышцы. При несоблюдении этих условий ее работоспособность резко падает. Вместе с тем из-за малых величин нервных импульсов использовать большее количество волокон и интерметаллидных нитей для повышения надежности не представляется возможным.
Задачей предложенного изобретения является разработка более функциональной и надежной искусственной мышцы.
Техническим результатом предложенного изобретения является повышение прочности, улучшение точности движений искусственной мышцы, увеличение скорости ее сокращения и расслабления при передаче нервного импульса от искусственного нерва, соединенного с живым, упрощение ее настройки, обеспечение возможности использовать искусственные мышцы большей длины.
Технический результат достигается за счет того, что предложенная искусственная мышца представляет собой среду по меньшей мере из одного полиорганосилоксана, по меньшей мере одной эпоксидной смолы и по меньшей мере одного катализатора полимеризации эпоксидной смолы, указанная среда прошита одной или более нитями по крайней мере одного интерметаллида с памятью формы и нейлоновым и/или полиэтиленовым волокном, при этом
нейлоновое и/или полиэтиленовое волокно соединено с термоэлектрическим преобразователем продольной формы, расположенным вдоль указанного волокна.
Для дополнительного упрочнения, придания мышце сглаженных и более прямолинейных движений она может быть также прошита нитями эластомера.
Для увеличения амплитуды сокращения искусственной мышцы под действием электрического импульса желательно, чтобы нейлоновое и/или полиэтиленовое волокно было скручено по спирали.
Для увеличения реакции мышцы на импульс тока и дополнительного улучшения точности движения желательно, чтобы одна или более нитей по крайней мере одного интерметаллида с памятью формы были скручены по спирали.
Для дополнительного увеличения скорости сокращения искусственной мышцы, более плавного начала и конца ее сокращения под действием электрического импульса, а также для снижения внутреннего трения желательно, чтобы одна или более нитей по крайней мере одного интерметаллида с памятью формы были скручены с нейлоновым и/или полиэтиленовым волокном по спирали вокруг друг друга.
Для повышения сцепления одна или более нитей по крайней мере одного интерметаллида с памятью формы и нейлоновое и/или полиэтиленовое волокно могут быть соединены со средой по меньшей мере из одного полиорганосилоксана посредством склеивания или высокотемпературного нагрева с последующим охлаждением.
В качестве катализатора полимеризации эпоксидной смолы можно использовать катализатор Граббса, который является наиболее доступным и распространенным.
Для дополнительного упрочнения, увеличения скорости сокращения под действием тока и улучшения восприимчивости к слабым токовым импульсам искусственная мышца может быть дополнительно прошита волокном углеродных нанотрубок.
В случае соприкосновения нескольких искусственных мышц для уменьшения трения между ними желательно, чтобы на их поверхность был нанесен слой из полиметилсилоксана.
Как и прототип, предложенная мышца приходит в движение за счет синхронного воздействия электрического (нервного) импульса на интерметаллидные нити с памятью формы и на нейлоновое и/или полиэтиленовое волокно. Умный материал «интерметаллид-волокно», в свою очередь, в ответ на тот или иной нервный импульс принимает определенное положение.
Наличие между волокном искусственной мышцы и передатчиком электрического импульса (например, искусственным нервом) термоэлектрического преобразователя (элемента Пельтье), преобразующего электричество в тепловую энергию, увеличит чувствительность данного волокна к импульсу тока, поскольку ему свойственно лучше сокращаться непосредственно под тепловым воздействием, нежели от электрического нагрева, и повысит как скорость сокращения мышцы, так и скорость ее расслабления.
При протекании тока через контакт входящих в состав термоэлектрического преобразователя двух полупроводниковых материалов с разными уровнями энергии электронов (например, теллурида висмута Bi2Te3 и твердого раствора SiGe) в зоне проводимости, электрон должен приобрести энергию, чтобы перейти в более высокоэнергетическую зону проводимости другого полупроводника. За счет этого эффекта при поглощении этой энергии происходит охлаждение места контакта полупроводников. При протекании тока в обратном направлении происходит нагревание места контакта полупроводников, которое немного усиливается за счет обычного теплового эффекта.
Таким образом, при передаче нервного импульса через термоэлектрический преобразователь будет происходить усиленный эффектом Пельтье нагрев волокна, а при прекращении нервного импульса за счет остаточного тока, обусловленного током заряжения двойных электрических слоев, образующихся на мембране аксона живого нерва или же на границе раствора ионов натрия и калия и электропроводящего полимера искусственного нерва (RU 2564558 С1, A61F 2/00, 10.10.2015), и протекающего в обратном направлении, будет происходить в некоторой степени охлаждение соприкасающейся с волокном стороны термоэлектрического преобразователя, что сократит время расслабления искусственной мышцы за счет более быстрого остывания волокна - таким образом снизится вероятность эффекта, схожего с миотонией (болезнью Томсена) живых мышц.
Образование двойного электрического слоя на межфазной границе электропроводящий полимер/раствор ионов натрия и калия при протекании через искусственный нерв тока, в свою очередь, является очевидным вследствие энергетически неравноценного состояния ионов на границе фаз и в объеме раствора. Двойной электрический слой также возникает на границах живых нервных волокон, что объясняется малой пропускной способностью мембраны по отношению к ионам натрия, концентрация которых вне клетки значительно больше, чем внутри нее (Дамаскин Б.Б., Петрий О.А. Современная электрохимия, М., Наука, 1965, с. 82), однако данный слой отвечает, в первую очередь, за формирование мембранного потенциала нейрона в невозбужденном состоянии (потенциала покоя). Остаточный же ток, позволяющий охладить рабочую поверхность элемента Пельтье, образуется в большей степени за счет двойного электрического слоя на границе раствора ионов натрия и калия и электропроводящего полимера искусственного нерва.
Описанный положительный эффект не способны обеспечить обыкновенные электропроводящие материалы, нагревающиеся под действием электричества, например, краски, которые предложили использовать Исследователи из Массачусетского технологического института (Seyed М. Mirvakili, Ian W. Hunter «Multidirectional Artificial Muscles from Nylon». Advanced materials. Volume 29, Issue 4, January 25, 2017).
Наличие элемента Пельтье снижает время, необходимое для разработки (настройки) имплантата, поскольку под воздействием непосредственно теплового импульса сокращение волокна будет проходить лучше, нежели от незначительного электрического нагрева при его совмещении с нервом по схеме параллельного соединения проводников. В то же время в прототипе сокращение волокна отчасти обуславливается сокращением нитей интерметаллида, которые работают с ним в одной системе, что в целом ослабляет искусственную мышцу.
Повышение чувствительности волокна позволит использовать в искусственной мышце большее количество волокон, а также немного увеличить толщину волокна и интерметаллидных нитей, что повышает надежность и прочность мышцы.
Кроме того, поскольку при большей чувствительности к электрическим импульсам волокно будет сокращаться в большей степени самостоятельно, нежели в связи с сокращением интерметаллидных нитей, это повысит точность движений.
Поскольку работа любого термоэлектрического преобразователя основана на эффекте Пельтье, при котором происходит выделение или поглощение тепла при прохождении электрического тока в месте контакта (спая) двух разнородных проводников, процесс нагрева волокна будет обеспечиваться в системе «живой или искусственный нерв - искусственная мышца» без дополнительных источников питания за счет нервных импульсов.
Для равномерного нагрева волокна по всей длине за счет большей площади соприкосновения, что положительно скажется на скорости сокращения и точности движений искусственной мышцы, необходимо, чтобы термоэлектрический преобразователь имел продольную форму и был расположен вдоль нейлонового и/или полиэтиленового волокна.
В первое время после вживления бионической мышцы при попытке пациента совершить ею движение рекомендуется внешне механически помогать этому - таким образом интерметаллидные нити быстрее «запомнят», какое положение им нужно принимать при том или ином электрическом импульсе.
Примеры
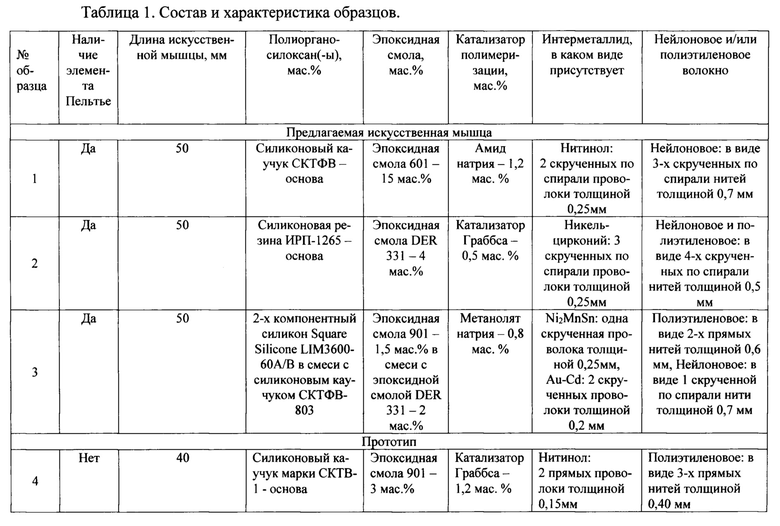
Были изготовлены три образца цилиндрической формы размером 50×7 мм.
Вначале произвели смешивание полиорганосилоксана, эпоксидной смолы и катализатора ее полимеризации, причем смешивание проводили в две стадии. На первой стадии при температуре его плавления в полиорганосилоксан, аккуратно помешивая его по часовой стрелке, добавили небольшое количество отвердителя полиорганосилоксана - перекись бензоила. Вслед за этим - после небольшого загущения, в него ввели эпоксидную смолу. Когда по мере остывания и действия отвердителя смесь стала еще более густой, продолжая ее аккуратно помешивать по часовой стрелке, на второй стадии в нее ввели катализатор полимеризации эпоксидной смолы.
Равномерное помешивание в одном направлении постепенно загущающегося полиорганосилоксана и поочередное введение эпоксидной смолы (при менее густой консистенции среды) и катализатора ее полимеризации (при более густой консистенции среды) привели к тому, что данные компоненты постепенно застыли в массе полиорганосилоксана, имея фазовое разделение между собой и в большей степени не прореагировав. При этом, поскольку смола была введена при менее густой консистенции среды, ее распространение в искусственной мышце является более обширным, в отличие от катализатора полимеризации.
Практически застывшую полученную смесь загрузили в цилиндрическую форму, остудили до температуры 65°С, прошили ее насквозь вдоль оси цилиндра нитями интерметаллида, нитями эластомера, нейлоновым и полиэтиленовым волокном, предварительно соединенным с микроэлементом Пельтье продольной формы (15×1,2×0,8 мм), состоящим из нескольких пар полупроводников (Bi2Te3 и твердого раствора SiGe).
После этого полученную заготовку остудили до комнатной температуры, в процессе чего произошло ее доотверждение и прочная фиксация нитей в среде, и извлекли из формы. Прошивку производили либо прямой иглой, либо иглой, выполненной по спирали. Состав и характеристика образцов представлены в таблице 1.
Образцы прошили насквозь двумя проводками токопроводящего полимера - политиофена, таким образом, что проводки имели площадь соприкосновения с каждой нитью интерметаллида, а также были соединены с контактами элемента Пельтье.
Верхнюю часть образца со вставленными в него проводками закрепили в сдавливающем металлическом кольце, а провода из токопроводящего полимера подключили к источнику питания.
Через нижнюю часть образца предложенной мышцы продели капроновую нитку с подвешенной гирькой массой 300 г. Мышцу-прототип испытывали гирькой массой 250 г.
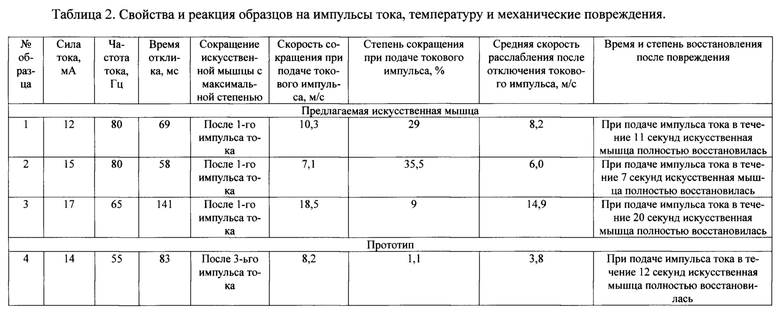
Далее на образец начали подавать ток по следующему режиму: 1,5 секунды - подача тока, 1 секунда - пауза, при этом после первого импульса для предложенной мышцы и третьего для мышцы-прототипа замерялись время задержки сигнала (время отклика), скорость и степень сокращения. После каждого импульса за счет конденсаторных явлений в источнике питания имел место быть незначительный остаточный ток.
После этого образцам нанесли повреждения: в средней его части сделали прорезь, повредив нити и волокна. Затем 1-й и 3-й образцы оставили в покое, а на 2-й, 4-й и 5-й начали подавать ток в третий раз по тому же режиму.
Характеристика подаваемого тока, свойства и реакции искусственной мышцы на импульсы тока, температуру окружающей среды и повреждения приведены в таблице 2.
Согласно полученным данным, полноценное сокращение предложенной искусственной мышцы обеспечивается уже после первого импульса тока, в то время как у прототипа полноценное сокращение обеспечивается только после третьего импульса тока, при этом длина предложенной мышцы на 10 мм больше, чем у прототипа.
Средняя скорость расслабления после отключения токового импульса предложенной искусственной мышцы значительно выше, нежели у прототипа, у которого в некоторой степени проявляется миотония. Это позволяет сделать заключение об улучшенной точности движений предложенной мышцы.
Наличие элемента Пельтье продольной формы, расположенного вдоль нейлонового и/или полиэтиленового волокна, позволяет использовать интерметаллидные нити и волокно большей толщины, что повысит надежность искусственной мышцы, при этом ее основные характеристики (время отклика, скорость и степень сокращения при подаче токового импульса, самовосстановление) остаются на удовлетворительном уровне.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСКУССТВЕННАЯ МЫШЦА | 2014 |
|
RU2563815C1 |
| БИОНИЧЕСКАЯ КОНЕЧНОСТЬ И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ | 2014 |
|
RU2559417C1 |
| Конструкция соединения искусственных нервов с искусственными мышцами | 2017 |
|
RU2653800C1 |
| Бионический экзоскелет | 2017 |
|
RU2645804C1 |
| ИСКУССТВЕННЫЙ НЕРВ | 2014 |
|
RU2564558C1 |
| ИСКУССТВЕННЫЙ НЕРВ С ФУНКЦИЕЙ ВОССТАНОВЛЕНИЯ СИНАПТИЧЕСКИХ СВЯЗЕЙ | 2015 |
|
RU2609049C1 |
| ЛИНЕЙНЫЙ АКТУАТОР ДЛЯ УСТРОЙСТВА ИСКУССТВЕННОЙ РУКИ | 2021 |
|
RU2791805C1 |
| ИСКУССТВЕННАЯ СЕТЧАТКА И БИОНИЧЕСКИЙ ГЛАЗ НА ЕЁ ОСНОВЕ | 2014 |
|
RU2567974C1 |
| Способ имплантации искусственного зуба | 2017 |
|
RU2649452C1 |
| МАТЕРИАЛ ДЛЯ ИЗГОТОВЛЕНИЯ СТОМАТОЛОГИЧЕСКИХ ПЛОМБ С ФУНКЦИЕЙ РЕГЕНЕРАЦИИ ЗУБНОЙ ТКАНИ И ВОССТАНОВЛЕНИЯ СЦЕПЛЕНИЯ С НЕЙ | 2016 |
|
RU2614715C1 |
Изобретение относится к области медицины, бионического протезирования. Предложена искусственная мышца, представляющая собой среду по меньшей мере из одного полиорганосилоксана, по меньшей мере одной эпоксидной смолы и по меньшей мере одного катализатора полимеризации эпоксидной смолы, указанная среда прошита одной или более нитями по крайней мере одного интерметаллида с памятью формы и нейлоновым и/или полиэтиленовым волокном, при этом нейлоновое и/или полиэтиленовое волокно соединено с термоэлектрическим преобразователем продольной формы, расположенным вдоль указанного волокна. Изобретение обеспечивает повышение прочности искусственной мышцы, улучшение точности движений, скорости сокращения и расслабления при передаче нервного импульса от искусственного нерва, соединенного с живым, в связи с тем, что при прекращении нервного импульса за счет остаточного тока, обусловленного током заряжения двойных электрических слоев, образующихся на мембране аксона живого нерва или на границе раствора ионов натрия и калия и электропроводящего полимера искусственного волокна, обеспечиваются охлаждение стороны термоэлектрического преобразователя, повышение надежности, упрощение настройки. 7 з.п. ф-лы, 2 табл., 1 пр.
1. Искусственная мышца, представляющая собой среду по меньшей мере из одного полиорганосилоксана, по меньшей мере одной эпоксидной смолы и по меньшей мере одного катализатора полимеризации эпоксидной смолы, причем указанная среда прошита одной или более нитями по крайней мере одного интерметаллида с памятью формы и нейлоновым и/или полиэтиленовым волокном, отличающаяся тем, что нейлоновое и/или полиэтиленовое волокно соединено с термоэлектрическим преобразователем продольной формы, расположенным вдоль указанного волокна.
2. Искусственная мышца по п. 1, отличающаяся тем, что она дополнительно прошита нитями эластомера.
3. Искусственная мышца по п. 1, отличающаяся тем, что нейлоновое и/или полиэтиленовое волокно скручено по спирали.
4. Искусственная мышца по п. 1, отличающаяся тем, что одна или более нитей по крайней мере одного интерметаллида с памятью формы скручены по спирали.
5. Искусственная мышца по п. 1, отличающаяся тем, что одна или более нитей по крайней мере одного интерметаллида с памятью формы скручены с нейлоновым и/или полиэтиленовым волокном по спирали вокруг друг друга.
6. Искусственная мышца по п. 1, отличающаяся тем, что одна или более нитей по крайней мере одного интерметаллида с памятью формы и нейлоновое и/или полиэтиленовое волокно соединены со средой из по меньшей мере одного полиорганосилоксана посредством склеивания или высокотемпературного нагрева с последующим охлаждением.
7. Искусственная мышца по п. 1, отличающаяся тем, что в качестве катализатора полимеризации эпоксидной смолы используют катализатор Граббса.
8. Искусственная мышца по п. 1, отличающаяся тем, что на ее поверхность нанесен слой из полиметилсилоксана.
| БИОНИЧЕСКАЯ КОНЕЧНОСТЬ И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ | 2014 |
|
RU2559417C1 |
| JP 2001112796 A, 24.04.2001 | |||
| US 6408289 B1, 18.06.2002 | |||
| Искусственная мышца | 1989 |
|
SU1645131A1 |
| Электронно-мышечное устройство | 1990 |
|
SU1787759A1 |
| Hanus J | |||
| et al | |||
| Use of thermoelectric properties of materials with shape memory in medicine// Sb | |||
| Lek., Czech, 1998, 99(4):515-20, abstr. | |||

