Изобретение относится к области робототехники, а именно к устройствам, обеспечивающим увеличение грузоподъемности, а также скорости и силы движений оператора. Изобретение может быть использовано для военных, медицинских и гражданских целей.
Известен двуногий экзоскелет для использования человеком-оператором, включающий ранец со жгутами для крепления экзоскелета к туловищу и каркас, соединенный с указанным ранцем. Каждая нога экзоскелета выполняет функции, аналогичные движению человеческой ноги, в том числе тазобедренного сустава, бедра, коленного сустава, икры, и крепится манжетами к ноге пользователя в области бедра, голени, а под подошвой ноги пользователя расположена пластина. Силовые приводы расположены в суставах экзоскелета (US 2014100493 A1, А61Н 3/00, 10.04.2014).
Использование силовых приводов усложняет и удорожает конструкцию. Экзоскелет обладает недостаточной подвижностью корпуса, зависит от внешних источников питания.
Известно роботизированное устройство, состоящее из каркаса, элементы которого имитируют части человеческого тела, системы приводов, основанных на электродвигателях, и системы управления (JP 5420405 В2, B25J 3/00, 19.02.2014).
Большая энергоемкость приводов, сложная система управления данным экзоскелетом не обеспечивают мгновенный отклик движителей и вызывают дополнительное мышечное напряжение у оператора.
Известен общевойсковой экзоскелет, содержащий каркасную систему, приводы движения, электронную систему управления и аккумуляторный источник питания. Каркасная система состоит из углепластиковой панели, повторяющей форму тыловой части торса человека, и рычагов, выполненных из шестнадцати углепластиковых труб диаметром 40-50 мм и соединенных шестнадцатью шарнирными соединениями, взаимное расположение которых повторяет основные анатомические механизмы двигательного аппарата человеческого скелета, при этом приводы движения рычагов каркаса выполнены из твердотельного аэрогеля из углеродных нанотрубок с примесью каучука в виде цилиндров диаметром от 40 до 120 мм с конусным заострением с двух сторон, прикрепленных к рычагам путем защемления конусных концов синтетическими тканевыми лентами, пропитанными эпоксидной смолой и стянутыми стальными заклепками (RU 2552703 С2, B25J 11/00, 10.06.2015).
Поскольку движения экзоскелета обеспечиваются только лишь системой рычагов, следовательно, невозможно обеспечить высокую точность повторения движений. Также отсутствует возможность настраиваться под движения и анатомические особенности конкретного оператора.
Наиболее близким аналогом предложенного изобретения является экзоскелет на основе искусственных мышц из нитинола, содержащий каркас из пластиковых деталей, закрепляемых на теле человека, передающий полезную нагрузку человеку, нитиноловые проволоки в роли приводов экзоскелета с прямой первоначальной формой, которые при нагреве будут разгибать суставы, и с г-образной памятью формы, которые в свою очередь будут сгибать суставы, систему нагрева нитиноловой проволоки до температуры срабатывания посредством пропускания через них электричества, систему водяного охлаждения нитинола путем циркуляции воды вдоль проволоки, систему управления нагрузкой (микрокомпьютер) и систему датчиков (http://marketprofs.ru/economics/view/ekzoskelet-na-osnove-iskusstvennykh-myshts-iz-nitinola-1470120430#sthash.TSCInRho.dpuf, 02.08.2016).
Общим недостатком всех экзоскелетов является их зависимость от источников питания. В большинстве случаев необходима система управления с микрокомпьютером.
Технической задачей предложенного изобретения является разработка упрощенного бионического экзоскелета, многократно увеличивающего мышечную силу за счет энергии движения оператора.
Техническим результатом предложенного изобретения является исключение источника питания и микрокомпьютера из конструкции экзоскелета, а также повышение точности повторения движений и обеспечение возможности настройки под анатомию и двигательные особенности конкретного оператора.
Технический результат достигается за счет того, что предложен экзоскелет, содержащий каркас 9, расположенные в нем нити интерметаллида с памятью формы с прямой первоначальной формой 2а и с г-образной первоначальной формой 2б, и генератор электрического тока, соединенный с данными нитями. В качестве генератора электрического тока он содержит преобразователи механического движения в электрический ток 1, выполненные в виде неподвижного электрода 6, расположенного со стороны внешней поверхности 12 каркаса экзоскелета, и подвижного электрода 7, рабочие поверхности электродов обращены друг к другу и выполнены из материалов, имеющих различную электронную проводимость, нити интерметаллида с памятью формы размещены в гибкой теплоэлектроизолирующей оболочке 5.
В гибкой теплоэлектроизолирующей оболочке 5 может быть также размещено нейлоновое и/или полиэтиленовое волокно 4, соединенное с генератором электрического тока 1 через термоэлектрический преобразователь 3.
Гибкая теплоизолирующая оболочка 5 может представлять собой среду из по меньшей мере одного полиорганосилоксана, по меньшей мере одной эпоксидной смолы и по меньшей мере одного катализатора полимеризации эпоксидной смолы с разделением фаз между эпоксидной смолой и катализатором ее полимеризации.
Работа предложенного бионического экзоскелета поясняется на фиг. 1, 2, 3 и 4.
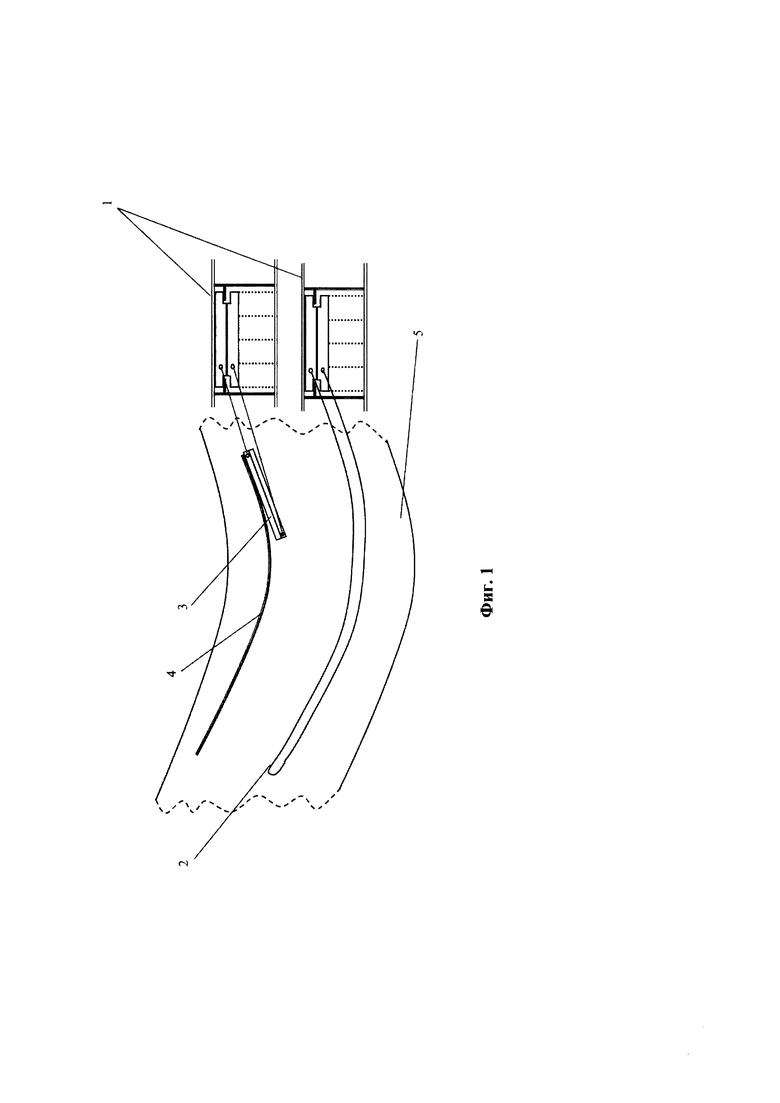
На фиг. 1 изображен привод движения экзоскелета.
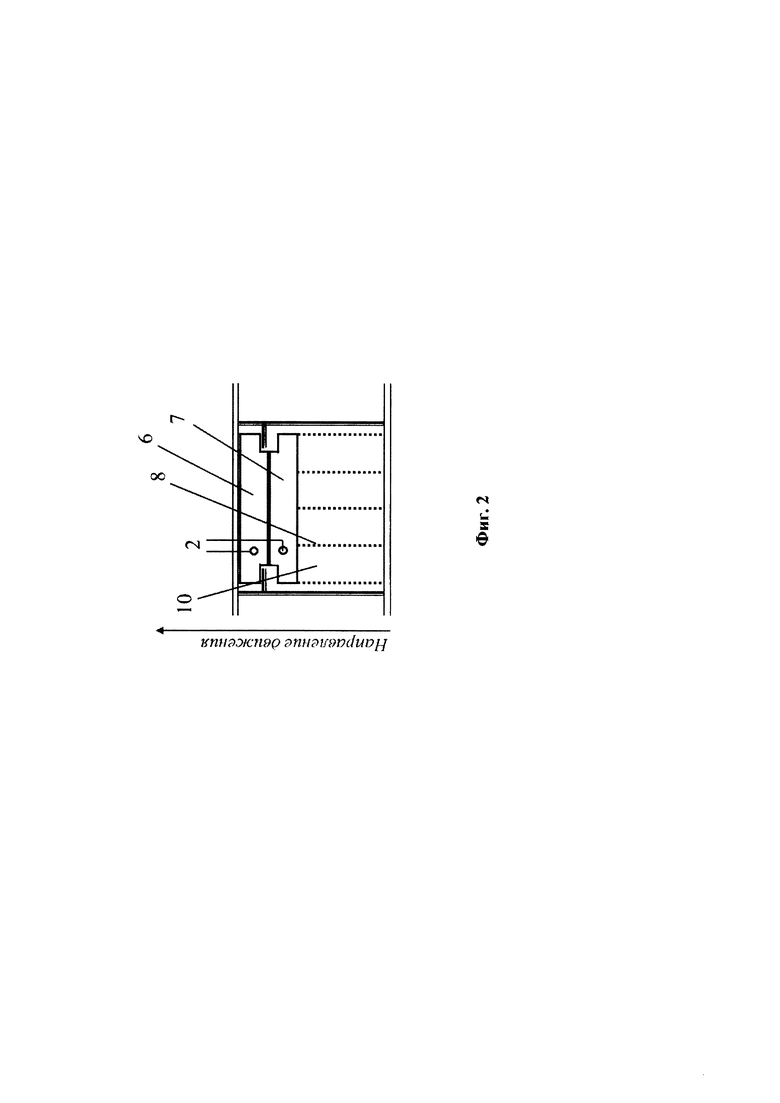
На фиг. 2 изображен преобразователь механического движения в электрический ток.
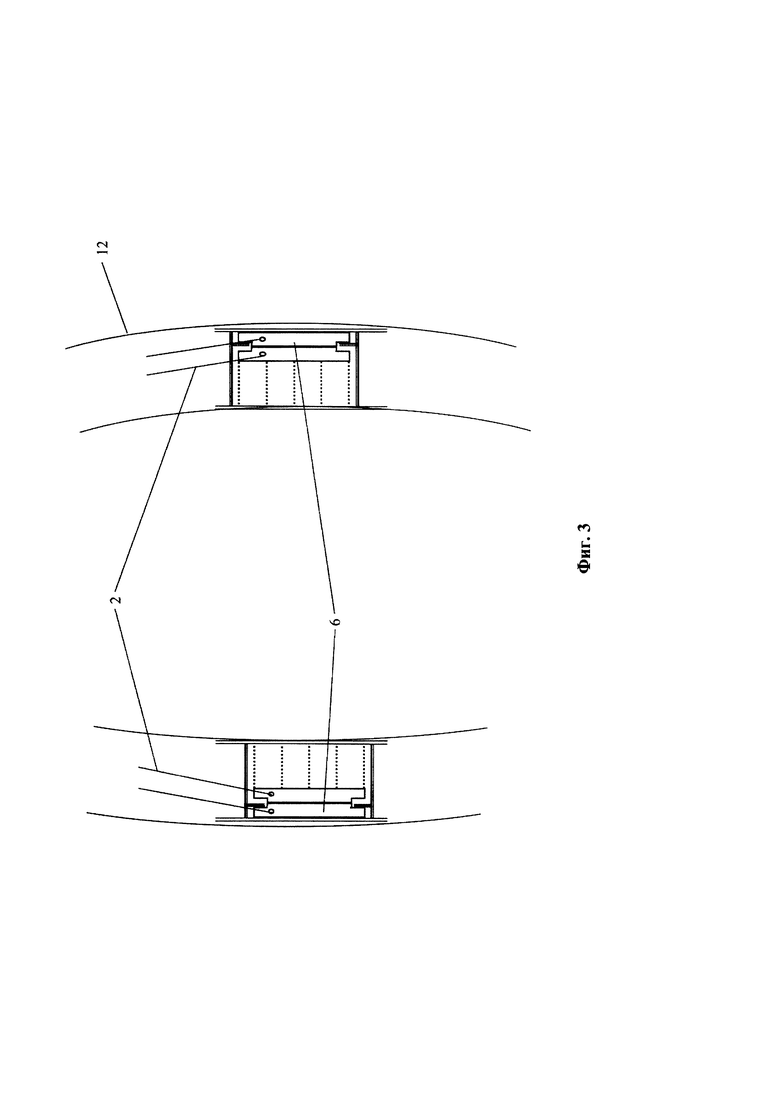
На фиг. 3 изображено расположение преобразователей механического движения в электрический ток относительно внешней поверхности экзоскелета.
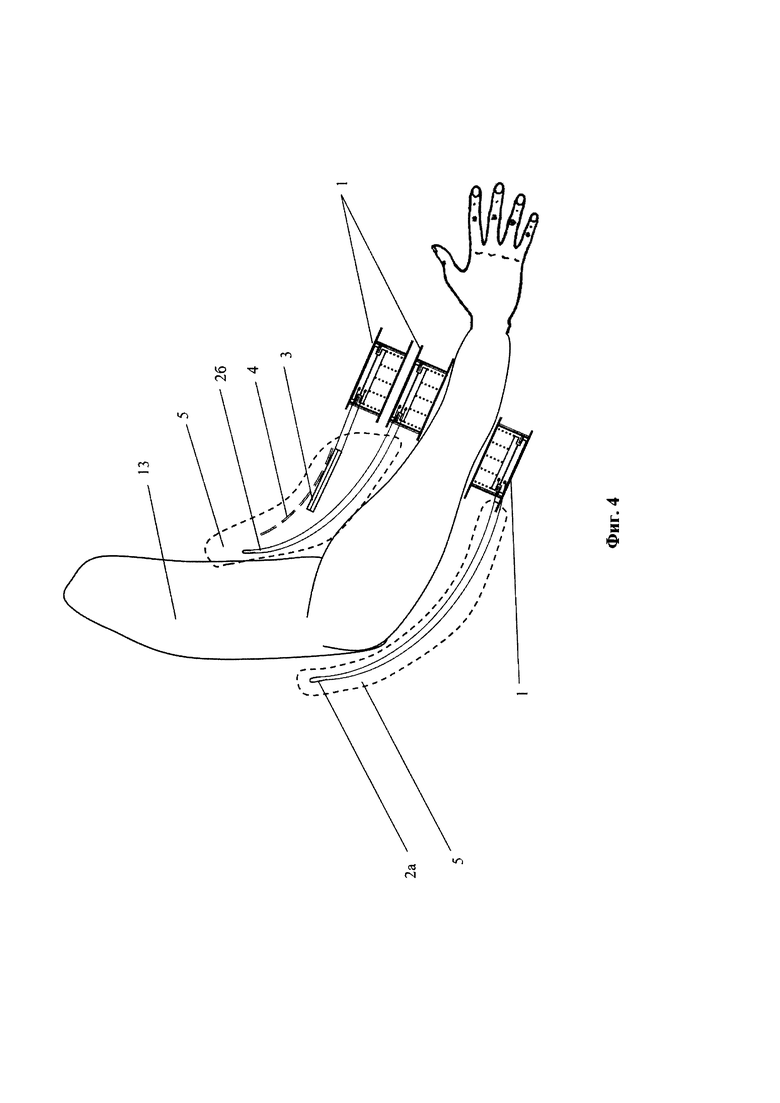
На фиг. 4 изображено взаимное расположение функциональных элементов экзоскелета и конечности человека (руки) (масштаб не соблюден).
На фигурах обозначены следующие элементы:
1 - преобразователи механического движения в электрический ток (генератор тока),
2 - нити интерметаллидов с памятью формы,
2а - нити интерметаллидов с памятью формы с прямой первоначальной формой,
2б - нити интерметаллидов с памятью формы с г-образной первоначальной формой,
3 - термоэлектрический преобразователь (элемент Пельтье),
4 - нейлоновое и/или полиэтиленовое волокно,
5 - гибкая теплоэлектроизолирующая оболочка,
6 - неподвижный электрод,
7 - подвижный электрод,
8 - пружины,
9 - каркас экзоскелета,
10 - область перемещения подвижного электрода.
12 - внешняя поверхность каркаса экзоскелета,
13 - рука.
Известен параметрический емкостный преобразователь, содержащий электроды, обращенные друг к другу рабочими поверхностями и установленные с возможностью перемещения относительно друг друга. Рабочая поверхность одного электрода выполнена из материала, имеющего электронную проводимость, отличную от электронной проводимости рабочей поверхности другого электрода, причем при сближении электродов образуется электрический контакт между их рабочими поверхностями (RU 2344537 С2, H02N 1/00, 27.02.2008). Его работа осуществляется следующим образом. При соединении рабочих поверхностей электродов образуется электронно-дырочный переход. Поскольку в р-области образованного электронно-дырочного перехода концентрация дырок гораздо выше, чем в n-области, дырки из р-области стремятся диффундировать в электронную область. Электроны диффундируют в p-область. Однако после ухода дырок в р-области остаются отрицательно заряженные акцепторные атомы, а после ухода электронов в n-области - положительно заряженные донорные атомы. Так как акцепторные и донорные атомы неподвижны, то в области электронно-дырочного перехода образуется двойной слой пространственного заряда - отрицательные заряды в р-области и положительные заряды в n-области. Таким образом, электроды самопроизвольно заряжаются противоположными зарядами. После разведения рабочих поверхностей электродов напряжение между ними увеличивается, и заряды с электродов стекают в нагрузку, вырабатывая электрическую энергию.
Если данные преобразователи расположить вдоль всего каркаса 9 таким образом, чтобы при движении конечности или корпусом электрод 6, расположенный по направлению движения, был неподвижен относительно каркаса 9, а второй электрод 7 по инерции смещался в противоположном направлении в область 10, то благодаря такой схеме движение любой части конечности или туловища оператора будет преобразовываться в электричество.
Неподвижные электроды 6 должны быть размещены ближе к внешней поверхности 12 экзоскелета, нежели подвижные. Это обеспечит инерционное перемещение подвижного электрода относительно неподвижного при движении оператора.
Возникающий электрический ток, проходя через нити интерметаллидов с памятью формы 2а и 2б, будет возвращать их в первоначальное положение - прямое или г-образное, и через каркас 9 полезная нагрузка будет передаваться оператору, увеличивая силу его движения.
Гибкая теплоэлектроизоляционная оболочка 5 исключит чувствительность интерметаллида к температуре окружающей среды и внешним электрическим воздействиям и, таким образом, предотвратит неконтролируемые движения.
В качестве гибкой теплоэлектроизолирующей оболочки 5 можно использовать среду из по меньшей мере одного полиорганосилоксана, по меньшей мере одной эпоксидной смолы и по меньшей мере одного катализатора полимеризации эпоксидной смолы с разделением фаз между эпоксидной смолой и катализатором ее полимеризации.
Наличие эпоксидной смолы наравне с катализатором ее полимеризации, например наиболее доступного катализатора Граббса, позволит оболочке 5 за короткий период времени восстановиться (сшиваться) в случае повреждений, например, механических, химических или тепловых.
Для увеличения скорости и силы движений в гибкой теплоэлектроизолирующей оболочке 5 можно разместить полиэтиленовое и/или нейлоновое волокно 4, соединенное с генератором электрического тока 1 через термоэлектрический преобразователь 3.
Данные виды волокон способны быстро сжиматься под тепловым воздействием, они отличаются высокой прочностью и износостойкостью. В случае синхронного воздействия импульса на интерметаллидные нити с памятью формы 2 и на нейлоновое и/или полиэтиленовое волокно 4 через термоэлектрический преобразователь (элемент Пельтье) 3 умный материал «нити интерметаллида-волокно» через некоторое количество повторяющихся импульсов становится способен сокращаться с большой амплитудой и скоростью, что связано с цепной реакцией: первый импульс приводит к небольшому сокращению волокна, провоцирующему небольшое сжатие интерметаллида, с которым он находится в одной системе, размещенной в теплоэлектроизолирующей оболочке, второй импульс уже непосредственно сжимает интерметаллид, запомнивший свое прежнее положение при токе с определенными характеристиками (сила, частота), в связи с чем волокно сокращается с большей амплитудой. С третьим и последующими импульсами система «интерметаллид-волокно» начинает работать с высокой скоростью и амплитудой движения.
Наличие термоэлектрического преобразователя 3 увеличивает чувствительность волокна к импульсу тока, поскольку ему свойственно лучше сокращаться непосредственно под тепловым воздействием, нежели от электрического нагрева, повысит скорость сокращения системы «интерметаллид-волокно» и увеличит точность движений, поскольку его рабочая сторона, соприкасающаяся с волокном, максимально быстро нагревается под действием электрических импульсов, и ее температура и продолжительность нагрева четко задаются параметрами электрического импульса, который зависит от продолжительности и амплитуды движения оператора.
При протекании тока через контакт входящих в состав термоэлектрического преобразователя двух полупроводниковых материалов с разными уровнями энергии электронов (например, теллурида висмута Bi2Te3 и твердого раствора SiGe) в зоне проводимости электрон должен приобрести энергию, чтобы перейти в более высокоэнергетическую зону проводимости другого полупроводника. За счет этого эффекта при поглощении этой энергии происходит охлаждение места контакта полупроводников. При протекании тока в обратном направлении происходит нагревание места контакта полупроводников, которое немного усиливается за счет обычного теплового эффекта.
Термоэлектрический преобразователь 3 должен иметь продольную форму и иметь большую площадь соприкосновения с нейлоновым и/или полиэтиленовым волокном 4. Это повысит равномерность нагрева волокна по всей длине, что положительно скажется на скорости сокращения волокна и точности движений приводов движения.
Охлаждающаяся сторона термоэлектрического преобразователя предотвратит длительный перегрев в области интерметаллидных нитей и нейлонового и/или полиэтиленового волокна.
Таким образом, поскольку нити интерметаллидов с памятью формы и система «интерметаллид с памятью формы - нейлоновое и/или полиэтиленовое волокно» представляют собой умные материалы, способные повторять движения, отработанные при воздействии того или иного электрического импульса, а преобразователь механической энергии в электричество вырабатывает ток, параметры которого (частота, амплитуда, продолжительность импульса) зависят от характеристики движения тела оператора, предлагаемый бионический экзоскелет может функционировать без микрокомпьютера (системы управления), обеспечит эффект многократного увеличения мышечной силы, повысит точность повторения движений, обеспечит возможность настройки под анатомию и двигательную особенность конкретного оператора.
Возможность преобразователя механической энергии в электричество работать автономно исключает необходимость использовать источники питания, что значительно упрощает процесс эксплуатации экзоскелета и снижает его себестоимость.
Возможность самовосстановления интерметаллидов с памятью формы обеспечивает большой ресурс работы экзоскелета, а использование в качестве гибкой теплоизолирующей оболочки среды из по меньшей мере одного полиорганосилоксана, по меньшей мере одной эпоксидной смолы и по меньшей мере одного катализатора полимеризации эпоксидной смолы с разделением фаз между эпоксидной смолой и катализатором ее полимеризации обеспечивает дополнительные возможности самовосстановления экзоскелета.
Бионический экзоскелет может быть предназначен для выполнения боевых задач. В таком случае внешнюю поверхность 12 его каркаса можно покрыть бронированными пластинами.
Грузоподъемность экзоскелета в первую очередь будет зависеть от конструктивных особенностей каркасной системы, поскольку данное изобретение предусматривает лишь многократное увеличение мышечной силы при совершении оператором движений.
Изобретение относится к области робототехники, а именно к устройствам, обеспечивающим увеличение грузоподъемности, а также скорости и силы движений оператора, и может быть использовано для военных, медицинских и гражданских целей. Экзоскелет содержит каркас, расположенные в нем нити интерметаллида с памятью формы с прямой первоначальной формой и с г-образной первоначальной формой и генератор электрического тока, соединенный с данными нитями. В качестве генератора электрического тока он содержит преобразователи механического движения в электрический ток, выполненные в виде неподвижного электрода, расположенного со стороны внешней поверхности каркаса экзоскелета, и подвижного электрода, рабочие поверхности электродов обращены друг к другу и выполнены из материалов, имеющих различную электронную проводимость, нити интерметаллида с памятью формы размещены в гибкой теплоэлектроизолирующей оболочке. Изобретение обеспечивает повышение точности повторения движений, возможность настраиваться под анатомию и двигательную особенность конкретного оператора, исключение источника питания и микрокомпьютера из конструкции экзоскелета. 2 з.п. ф-лы, 4 ил.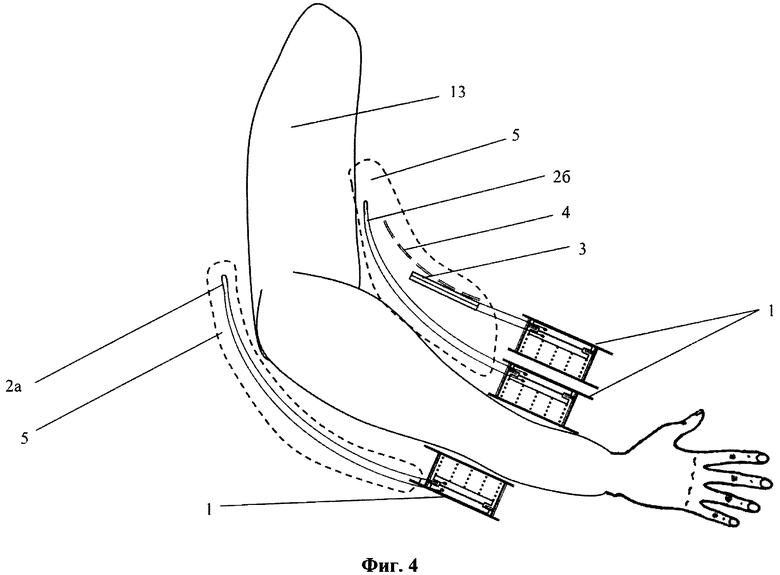
1. Экзоскелет, содержащий каркас, расположенные в нем нити интерметаллида с памятью формы с прямой первоначальной формой и с г-образной первоначальной формой и генератор электрического тока, соединенный с данными нитями, отличающийся тем, что в качестве генератора электрического тока он содержит преобразователи механического движения в электрический ток, выполненные в виде неподвижного электрода, расположенного со стороны внешней поверхности каркаса экзоскелета, и подвижного электрода, рабочие поверхности электродов обращены друг к другу и выполнены из материалов, имеющих различную электронную проводимость, а нити интерметаллида с памятью формы размещены в гибкой теплоэлектроизолирующей оболочке.
2. Экзоскелет по п. 1, отличающийся тем, что в гибкой теплоэлектроизолирующей оболочке также размещено нейлоновое и/или полиэтиленовое волокно, соединенное с генератором электрического тока через термоэлектрический преобразователь.
3. Экзоскелет по п. 1, отличающийся тем, что гибкая теплоизолирующая оболочка представляет собой среду из по меньшей мере одного полиорганосилоксана, по меньшей мере одной эпоксидной смолы и по меньшей мере одного катализатора полимеризации эпоксидной смолы с разделением фаз между эпоксидной смолой и катализатором ее полимеризации.
| УНИВЕРСАЛЬНЫЙ ОБЩЕВОЙСКОВОЙ ЭКЗОСКЕЛЕТ | 2013 |
|
RU2552703C2 |
| WO 2008094191 A2, 07.08.2008 | |||
| 0 |
|
SU171262A1 | |

