Группа изобретений относится к области бионики, и может найти применение в протезировании, машиностроении и робототехнике, в частности при создании манипуляторов.
Известен многофункциональный активный протез руки, содержащий наплечник, исполнительный орган, выполненный в виде трехзвенной шарнирно-рычажной цепи с тремя датчиками углов, датчики независимого управления и системы независимого управления исполнительным механизмом ротации искусственной кисти и исполнительным механизмом искусственной кисти, три системы управления связным движением исполнительных механизмов сгибания-разгибания плеча, предплечья и искусственной кисти, каждая из которых содержит сумматор, два функциональных преобразователя, усилитель мощности и привод, а также задающий орган, выполненный в виде плоского трехзвенного кинематического аналога исполнительной цепи, содержащий три датчика управления связным движением. Протез снабжен жестким креплением исполнительного органа и закрепленным на нем блоком коррекции положения звена плеча, содержащим последовательно соединенные акселерометр, блок двойного интегрирования и определитель угла коррекции, при этом определитель угла коррекции соединен с сумматором системы управления связным движением сгибания плеча, а жесткое крепление исполнительного органа зафиксировано на корпусе инвалида и выполнено с возможностью свободного перемещения надплечья с наплечником (RU 2427349 C1, A61F 2/56, 27.08.2011).
Недостатком данного протеза является то, что его работа осуществляется посредством движения здоровой части руки. В случае если рука ампутирована полностью, его функционирование невозможно.
Известен протез или манипулятор, содержащий устройство, управляемое приводами и задающее движение, и управляемые через упомянутое устройство ближний и дальний элементы. Ближний элемент установлен непосредственно на управляемом устройстве и выполнен с возможностью поворота относительно его. Дальний установлен на ближнем и выполнен с возможностью поворота относительно его и осуществления захвата. Оба элемента выполнены с возможностью вращения в противоположном направлении относительно друг друга, а также вокруг оси шарнирного сочленения, расположенного между ними (СА 2829537 A1, A61F 2/54, 11.04.2014).
Недостатком описанного протеза является то, что он имеет сложную электронную конструкцию и его движения задаются мышцами. Таким образом, в отношении сигнала мозга, сначала поступающего в мышцы, затем - в датчики движения, затем - в электронное управляющее движением устройство, затем - к двигательным элементам, имеет место запаздывания. Кроме того, описанный протез не обеспечивает точность движений и не регулирует скорость захвата, поскольку подобные характеристики можно достигнуть лишь в том случае, если управление будет осуществляться непосредственно нервными импульсами. Наиболее близким аналогом является протез ноги, в коленной чашечке которого находятся микропроцессор и четыре датчика, которые посылают в процессор сведения о движении тела, распределении веса и угле наклона, что дает микрочипу возможность предвидеть следующее движение владельца и среагировать на него, отправив те или иные сигналы в двигательные элементы (исполнительные органы). Протез также предполагает наличие имплантированных электродов (элементов, передающих сигнал), которые могут быть подсоединены либо к периферийным нервам пациента, либо непосредственно к спинномозговым нервам (журнал Science Translational Medicine, том 5, выпуск 210, страница 209-210, 06.11.2013). Недостатком прототипа является необходимость использования множества сенсоров, в том числе гироскопов и измерителей ускорения, электромоторчиков с редкоземельными магнитами и компьютерных чипов, что усложняет способ изготовления протеза и его установку. Также недостатком протеза-аналога является его труднодоступность: в Англии его цена на момент начала 2014 года составляла около 40.000 фунтов стерлингов.
Задачей предложенной группы изобретений является разработка недорогой и износостойкой бионической конечности, способной к управлению слабыми электрическими импульсами, преимущественно, нервными. Техническим результатом предложенной группы изобретений является обеспечение возможности управления бионической конечности электрическими импульсами, идущими непосредственно от нерва, увеличение точности и пластичности движений, возможности осязать и чувствовать температуру, а также снижение времени отклика исполнительных органов. Техническим результатом также является обеспечение приживаемости конечности и упрощение ее установки.
Технический результат достигается за счет того, что предложена бионическая конечность, состоящая из элементов, передающих входящий сигнал исполнительным органам, и исполнительных органов, при этом она содержит искусственный скелет, представляющий собой изделия в форме костей, соединенные между собой шарнирно, а также соединенные прикрепленными к ним исполнительными органами, в качестве которых служат искусственные мышцы, представляющие собой среду из, по меньшей мере, одного полиорганосилоксана, прошитую одной или более нитями, по крайней мере, одного интерметаллида с памятью формы и нейлоновым и/или полиэтиленовым волокном, в качестве элементов, передающих входящий сигнал, служат искусственные нервы, по крайней мере, двух типов, выбранных из группы: чувствительные, двигательные и смешанные, причем искусственные нервы представляют собой среду из, по крайней мере, одного органического электропроводящего полимера, упомянутая среда обладает сквозной пористостью с порами, заполненными раствором ионов натрия и калия, и обвита, по крайней мере, одним слоем полимерного диэлектрика, двигательные и/или смешанные искусственные нервы одним концом либо в целостном состоянии, либо в разветвленном вшиты в искусственные мышцы таким образом, что оголенные от полимерного диэлектрика части искусственныхнервов имеют соприкосновение с нитями интерметаллидов и нейлоновым и/или полиэтиленовым волокном, чувствительные и/или смешанные искусственные нервы одним концом присоединены к матрице из пьезоэлектриков, на другие концы всех искусственных нервов нанесена катионообменная мембрана, пропускающая ионы щелочных металлов.
Для предотвращения кратковременной потери контакта во время движения оголенные от полимерного диэлектрика части искусственных нервов сплетены с нитями интерметаллидов и нейлоновым и/или полиэтиленовым волокном. Для уменьшения износа шарнирных соединений искусственный скелет может быть выполнен из антифрикционного сплава на основе алюминия или сплава с высоким содержанием графита. Подобные сплавы отличаются достаточной ударной вязкостью и прочностью, легкостью и низкой стоимостью, и при этом они имеют антифрикционные свойства. Графит, выделяющийся в процессе истирания сочленений (суставов) скелета, может служить в качестве смазки. Бионическая конечность может дополнительно содержать оболочку, в качестве которой может служить искусственная кожа, представляющая собой слой латекса со встроенными в него матрицами пьезоэлектриков. Для обеспечения возможности восстановления искусственной кожи слой латекса должен дополнительно содержать, по меньшей мере, один катализатор полимеризации.
Для обеспечения возможности быстрого восстановления искусственные мышцы должны представлять собой среду из, по меньшей мере, одного полиорганосилоксана и дополнительно введенных, по меньшей мере, одной эпоксидной смолы и, по меньшей мере, одного катализатора полимеризации. Для поддержания и усиления входящего импульса искусственные нервы могут дополнительно содержать нановолокна поливинилиденфторида. Матрица из пьезоэлектриков может представлять собой матрицу нановолокон поливинилиденфторида, которые обладают прочностью и чувствительностью к соприкосновениям.
Технический результат достигается также за счет того, что предложен способ изготовления бионической конечности, в котором искусственные нервы готовятпосредством смешивания вспенивателя и, по крайней мере, одного органического электропроводящего полимера, полученную смесь нагревают до температуры разложения вспенивателя, выдерживают до завершения процесса образования сквозных пор, остужают и пропускают через фильеру, пропитывают полученную нить раствором ионов Na+и К+, обвивают ее, по крайней мере, одним слоем полимерного диэлектрика и на один конец наносят катионообменную мембрану, пропускающую ионы щелочных металлов, искусственные мышцы готовят посредством прошивания среды из, по крайней мере, одного полиорганосилоксана, одной или более нитями, по крайней мере, одного интерметаллида с памятью формы, а также нейлоновым и/или полиэтиленовым волокном, далее вшивают искусственные нервы, по крайней мере, двух типов, выбранных из группы: чувствительные, двигательные и смешанные, в искусственные мышцы таким образом, чтобы оголенные от полимерного диэлектрика участки двигательных и/или смешанных искусственных нервов соприкасались с нитями интерметаллидов и нейлоновым и/или полиэтиленовым волокном, концы чувствительных и/или смешанных искусственных нервов без нанесенной катионообменной мембраны, пропускающей ионы щелочных металлов, соединяют с матрицей пьезоэлектриков, при этом искусственные мышцы соединяют с искусственным скелетом.
Чтобы придать искусственным мышцам свойство самовосстановления, во время их приготовления предварительно можно произвести плавление полиорганосилоксана и его смешение с, по крайней мере, одной эпоксидной смолой и с, по крайней мере, одним катализатором полимеризации с последующим охлаждением полученной смеси.
Состав и функциональность искусственных мышц объясняются следующим. Полиорганосиликаны имеют ряд преимуществ по сравнению с другими имитаторами живых тканей. Изделия из них являются наиболее безвредными и долговечными, имеют очень низкую температуру стеклования (около -130°C), способны копировать и сохранять заданный им внешний вид, а также поконсистенции они близки к биологическим тканям, например натуральным мышцам.
Известен ряд материалов с памятью формы, для которых также возможен эффект самовосстановления. Одним из наиболее распространенных примеров такого материала служит интерметаллид Ni-Ti (нитинол), в котором на один атом титана приходится один атом никеля. Если выполненное из него изделие деформировать, то при нагревании оно снова примет прежнюю форму. Наравне с нагревом в виду наличия некоторого сопротивления вернуть форму изделию можно также посредством пропускания через него тока. В случае если изделие представляет собой тонкую нить, это можно сделать даже небольшим током, например, до 20 мА/см2, который течет по нервным волокнам. Запоминание своего положения при тех или иных условиях, а также возможность самовосстановления, обусловлены эффектом дисклинации, при котором происходит миграция зерен на границах дефектных зон, то есть металлические дефекты обретают поля напряжений с настолько интенсивными зарядами, что края трещин сближаются и поврежденный интерметаллид регенерируется.
Было установлено, что подобным свойством могут обладать некоторые другие интерметаллиды на основе никеля, в которых второй компонент в чистом виде имеет гексагональную плотноупакованную или кубическую объемно-центрированную решетку. К таким интерметаллидам относятся Ni-Zr и Ni-V. Использование последнего в медицинских целях исключается в виду повышенной токсичности ванадия и его соединений, однако его применение возможно в робототехнике при создании манипуляторов.
Исследование интерметаллида Ni-Zr, в котором на один атом никеля приходится один атом циркония, показало, что он способен немного быстрее реагировать на электрические импульсы, нежели нитинол (Ti-Ni), что скорее всего связано с теплопроводностью второго компонента: теплопроводность циркония при 300 К составляет 22,7 Вт/(м·К), а титана - 21,9 Вт/(м·К). Известно проявление памяти формы под воздействием магнитного поля у интерметаллидного соединения, называемого сплавом Гейслера и имеющегоследующую формулу: X2YZ, где X, Y, Z - разные металлы. Наиболее распространенным видом данного сплава является Ni2MnGa. Память формы вызывается мартенситным фазовым переходом, и может также обеспечиваться электрическими импульсами, меняющими магнитное поле сплава Гейслера. Помимо вышеперечисленных известен также интерметаллид с памятью формы -Fe-Mn-Si, который отличается низкой стоимостью.
Также известны другие материалы с памятью формы, например, такие как интерметаллиды: Au-Cd, Cu-Zn-Al, Cu-Al-Ni, Fe-Mn-Si, Fe-Ni, Cu-Al, Cu-Mn, Co-Ni и Ni-Al. Однако в виду их слабовыраженных свойств памяти формы и самовосстановления их сложнее использовать на практике. Таким образом, для управления бионической мышцей электрическими импульсами ее необходимо прошить нитями, по крайней мере, одного интерметаллида с памятью формы, при этом толщину нитей следует подбирать, исходя из величины поступающих сигналов - соответственно, исходя из размера, типа и характеристик нерва, от которого передается сигнал, электропроводности интерметаллида и выраженности его свойства памяти формы. В большинстве случаев для восприятия малых нервных импульсов рекомендуемая толщина нитей должна быть небольшой - порядка 0,02-0,5 мм. Однако в случае применения некоторых интерметаллидов с высокой электропроводностью данный диапазон может быть расширен. Так в случае применения интерметаллида Au-Cd толщина нити может составлять более 0,5 мм, однако в виду присущей ему хрупкости его использование нежелательно. Для восприятия сильных импульсов толщина может составлять несколько миллиметров и более того.
Вместе с тем использование подобного интерметаллида без среды, которая играет роль теплоизолятора и электроизолятора (в данном случае полиорганосилоксан), способствует чувствительности интерметаллида к температуре окружающей среды, и таким образом его движение становится неконтролируемым.
Существуют материалы, способные быстро сжиматься под тепловым воздействием. Ими являются полиэтиленовое и нейлоновое волокна,отличающиеся низкой стоимостью, высокой прочностью и износостойкостью. Однако их использование в качестве искусственных мышц без нитей интерметаллидов с памятью формы приводит к ряду проблем. В виду небольшой электропроводности волокон слабые токовые импульсы не способны привести такие мышцы в действие без дополнительных электронных устройств. Однако в случае синхронного воздействия импульса и на интерметаллидные нити с памятью формы и на нейлоновое и/или полиэтиленовое волокно мышцы через некоторое количество повторяющихся импульсов становятся способны сокращаться с большой амплитудой и скоростью. Это связано с цепной реакцией: первый импульс приводит к небольшому сокращению волокна, провоцирующему небольшое сжатие интерметаллида, с которым он находится в одной системе, соединенной полиорганосилоксановой средой, второй импульс уже непосредственно сжимает интерметаллид, запомнивший свое прежнее положение при токе с определенными характеристиками (сила, частота), в связи с чем волокно сокращается с большей амплитудой. С третьим и последующими импульсами искусственная мышца начинает работать с высокой скоростью и амплитудой движения. Таким образом, искусственная мышца может полноценно работать только при подаче электрического импульса и на волокно и на интерметаллидные нити одновременно.
Прошивание искусственной мышцы нитями эластомера дополнительно упрочнит ее и позволит совершать более сглаженные и плавные движения при сохранении прочих параметров. В качестве эластомера допустимо применять различные каучуки и резины, желательно, с высокой эластичностью и сопротивлением раздиру.
Наличие в составе искусственной мышцы эпоксидной смолы наравне с катализатором полимеризации, например, наиболее доступного катализатора Граббса, позволит мышце за короткий период времени восстановиться в случае повреждений, например, механических, химических или тепловых. При нагревании в развернутом виде волокна нейлоновое способно сокращаться лишь на 4/100, полиэтиленовое - на 3/1000. Однако в случае скручиванияданных волокон по спирали нейлоновое приобретает способность сжиматься на 34/100, а полиэтиленовое - на 16/100. Этот эффект объясняется простым физическим явлением: в выпрямленном виде нить сокращается за счет увеличения ее толщины, во втором случае она сокращается и за счет увеличения ее толщины и за счет сокращения спирали. Указанные значения близки к способности сокращения натуральных мышечных волокон и могут позволить их аналогу поднимать груз большой массы.
В том случае, если нити интерметаллидов с памятью формы скручены по спирали, реакция искусственной мышцы на один и тот же импульс тока становится лучше: по скорости, степени сокращения и прямолинейности движений, то есть отсутствуют колебания, перпендикулярные оси прохождения спиралей интерметаллидных нитей. Скорость и степень сокращения интерметаллидов объясняются аналогичным эффектом, как в случае нейлоновых и полиэтиленовых волокон. Отсутствие перпендикулярных колебаний объясняется следующим. Движение интерметаллида в виде выпрямленной нити сложнее предсказать в виду того, что оно определяется памятью кристаллической структуры металла лишь на сечении тонкой нити. В случае если температура в силу каких-то факторов на одном участке нити станет сильно отличаться от температуры на других участках, это может привести к некорректному движению искусственной мышцы. Вместе с тем движение интерметаллида в виде нити, скрученной по спирали, станет определяться памятью кристаллической структуры металла на всем сечении витка спирали, что способствует стабилизации и прямолинейности движений. Если нити интерметаллидов с памятью формы будут скручены вместе с волокном по спирали друг вокруг друга, это приведет к ряду положительных эффектов, а именно: к более плавному началу и концу сокращения искусственной мышцы под действием электрического импульса, к дополнительному увеличению скорости сокращения и к снижению внутреннего трения. Поскольку чувствительные к токовому импульсу материалы реагируют на ток с различной скоростью (например, интерметаллид в виду своей высокой электропроводности реагирует на ток быстрее), их переплетение приведет к ихсинхронному движению, что сократит трение внутри материала и, соответственно, уменьшит его износ.
Помимо этого стоит отметить, что вшивание нитей интерметаллида и волокна в скрученном состоянии увеличивает их сцепление с основой, и таким образом во время сокращения в мышце не происходит внутреннего трения и она работает с максимальной эффективностью.
Для дополнительного улучшения сцепления, что в большей степени требуется, если нить находится в выпрямленном состоянии, ее можно соединять с полиорганосилоксановой основой, например, посредством склеивания или высокотемпературного нагрева. В случае последнего полиорганосилоксан вначале расплавляется, а при дальнейшем охлаждении срастается с нитью. Склеивание лучше проводить клеем на основе эпоксидной смолы, которая в случае разрыва быстро полимеризуется под действием катализатора. Искусственная мышца может быть дополнительного прошита волокном углеродных нанотрубок, которое также сокращается под действием электрических импульсов и при этом обладает высокими прочностными свойствами, реагирует на импульсы с высокой скоростью и имеет хорошую восприимчивость к слабому току. Таким образом, его наличие может несколько улучшить соответствующие свойства мышцы, однако стоимость последней в таком случае увеличится.
Состав и функциональность искусственных нервов объясняются следующим. Долгое время существовала проблема создания искусственного аналога нервного волокна - электропроводящего материала, который можно было бы сшить с нервом. Однако большинство проводников являются металлами и другими неорганическими веществами, очень далекими по химическому сродству с нервной тканью. Подобную проблему можно решить, используя органические электропроводящие полимеры, в качестве которых рекомендуется использовать полипиррол, полиазулен, политиофен, поли-α-нафтиламин или их смесь. Перечисленные полимеры, являясь безвредными, обладая высокими температуро- и химической устойчивостью, помимо всего прочего, способны не только сшиваться с нервами, но при пропускании сквозь нерв токаспособствуют восстановлению нервного волокна, что было установлено экспериментально. В наиболее выраженной форме такое свойство проявляет полипиррол.
Токовый импульс в живом нерве проходит сразу в обе стороны, то есть из мозга - в аксон, передающий импульс рабочему органу, и наоборот - из аксона в мозг, при этом импульс передается в обе стороны по всему объему нервного волокна. В первую очередь, это происходит за счет перемещения по объему волокна зарядов в обе стороны - в качестве отрицательного заряда служат электроны, а в качестве положительного - ионы натрия, причем полный ионный ток обуславливается сразу тремя явлениями: движением ионов натрия, противоположным движением ионов калия и током утечки, расходующимся на работу принимающих органов. Чтобы обеспечить способность искусственного нерва к ионному обмену с настоящим, он должен обладать сквозной пористостью, причем поры должны быть заполнены раствором ионов натрия и калия, например, в виде раствора NaCl и KCl, при этом на сшиваемый конец искусственного нерва необходимо нанести катионообменную мембрану, пропускающую ионы щелочных металлов.
В дальнейшем перед проведением искусственной иннервации необходимо будет механическим способом сделать на конце искусственного нерва углубление. При сшивании в это углубление помещается конец живого нерва таким образом, чтобы и волокно и оболочка последнего имели соприкосновение с электропроводящим полимером, но при этом чтобы поры полимера были полностью закрыты мембраной. В таком случае волокно и оболочка срастаются с полимером. Более того, использование полимеров полиазулена, политиофена, поли-α-нафтиламина, а в большей степени полипиррола, приводит к заживлению и ускоренному разрастанию нервной ткани.
Чтобы изготовить такой материал, необходимо смешать вспениватель (порофор) и, по крайней мере, один органический электропроводящий полимер. Полученную смесь необходимо нагреть до температуры разложения вспенивателя, выдержать до завершения процесса образования сквозных пор, остудить и пропустить через фильеру.Для оптимизации процесса порообразования вспениватель следует подбирать исходя из типа электропроводящего полимера, при этом температура разложения вспенивателя должна быть ниже температуры разложения полимера.
Стоит отметить, что изготовление полимерной нити со сквозной пористостью посредством высокотемпературного пропускания через фильеру в какой-то степени приводит к сглаживанию поверхности нити и закрыванию пор. В дальнейшем это предотвращает потерю раствора ионов натрия и калия. Их утечку также предотвращает один или более слоев полимерного диэлектрика, нанесенных на нерв.
Если сшивать подобным образом изготовленный искусственный нерв с настоящим, на сшиваемый конец необходимо будет нанести катионообменную мембрану, пропускающую ионы щелочных металлов.
В качестве мембраны можно использовать мембрану марки МК-40, представляющую собой композит из ионообменной смолы КУ-2 и полиэтилена, и гомогенную мембрану nafion-117, представляющую собой сополимер тетрафторэтилена и перфторированного сульфосодержащего винилового эфира, а также многие другие катионообменные мембраны, которые следует подбирать, исходя из их химической стойкости, цены и величины пор. При возбуждении нейрона или его отростка - аксона, ионы Na+устремляются внутрь упомянутого нейрона. В противоход потоку ионов Na+из клетки через мембрану диффундирует компенсирующий поток ионов К+, который несколько запаздывает. Аналогичное явление можно наблюдать и при прохождении ионов через искусственную катионообменную мембрану. Это связано с различием в размерах ионов калия и натрия (радиус иона калия - 133 пм, натрия - 97 пм), притом что такие характеристики, как электроотрицательность и электродный потенциал, у них слабо различаются.
Данный процесс приводит к возникновению отрицательного заряда на наружной поверхности клеточной мембраны. Внутренняя поверхность мембраны приобретает положительный заряд, что провоцирует возникновение потенциала действия.В случае сшивания живого нерва с предложенным искусственным аналогом зарождение потенциала действия имеет место быть не на границе "живой нерв (или искусственный нерв) - принимающий орган", а на границе "живой нерв -искусственный нерв", поскольку последний в таком случае и станет служить в качестве промежуточного принимающего органа, который в дальнейшем передаст импульс в конечный принимающий орган. О недостатках подобного устройства судить сложно, однако очевидно, что такая разница станет нести отрицательный эффект в том случае, если будет происходить дополнительная потеря тока на протяжении искусственного нерва в виду его электрических свойств и параметров его соединений с нервом и мышцами. Чтобы исключить сильную потерю тока, упомянутый искусственный нерв должен быть полностью или частично обвит, по крайней мере, одним слоем полимерного диэлектрика. Оставить оголенные участки можно лишь в местах соприкосновения с принимающим органом.
Стоит также отметить, что, несмотря на то, что предложенный полимерный искусственный нерв может служить аналогом живого, тем не менее, он не способен в точности воспроизводить весь сложный процесс, протекающий в нервном волокне при получении или передаче импульса исполнительному органу. Это чревато тем, что импульс мозга будет доходить до цели не в полной степени. Однако в случае, если исполнительный орган имеет двигательную функцию (например, как мышцы), эту проблему можно отчасти решить, если искусственный нерв будет содержать нановолокна органического полимера поливинилиденфторида, которое можно получать в процессе так называемого электропрядения. У этого вещества были обнаружены пьезоэлектрические свойства, при этом он имеет много преимуществ по сравнению с неорганическими веществами, генерирующими ток: он не является хрупким, а также имеет большее сродство с полипирролом, полиазуленом и политиофеном, из которых в большей степени состоит полимерный искусственный нерв. Использование нановолокна поливинилиденфторида приведет к компенсации тормозящих эффектов. Когда исходный сигнал мозга через нерв дойдет до исполнительного двигательного органа, движение последнего приведет кдвижению искусственного нерва, в котором вместе с ним станут деформироваться нановолокна поливинилиденфторида, усиливая поступающий сигнал.
Описанное усовершенствование рекомендуется применять в случае, если искусственный нерв служит в роли двигательного. Если же он служит в роли чувствительного, то к его концу, который должен принять сигнал, то есть "чувство", должна быть присоединена матрица из пьезоэлектриков, в роли которых могут служить, например, элементы из пьезоэлектрической керамики, изготовленной из цирконататитаната свинца PbZrO3 - PbTiO3, или элементы, состоящие из Bi12GeO28 или Bi12SiO20, однако в силу высокой прочности и чувствительности предпочтительно использовать нановолокна поливинилиденфторида. При реализации такой схемы движение пьезоэлектриков приведет к созданию сигнала-чувства, идущего в мозг. Для того чтобы исходный сигнал, поступающий, например, из мозга, не ослабевал на протяжении искусственного нерва и практически без потерь доходил до исполнительного органа, например, искусственной мышцы, двигательные и/или смешанные (отвечающие и за движение и за чувствительность) искусственные нервы одним концом либо в целостном состоянии, либо в разветвленном должны быть вшиты в искусственные мышцы таким образом, чтобы оголенные от полимерного диэлектрика части искусственных нервов имели соприкосновение с нитями интерметаллидов и нейлоновым и/или полиэтиленовым волокном. Чтобы обеспечить это, на части искусственных нервов слои диэлектрика можно либо не наносить изначально, либо нанести с дальнейшим снятием - это зависит от того, какой из методов в той или иной ситуации удобней.
При этом оголенные участки искусственных нервов лучше обвить с нитями интерметаллидов и нейлоновым и/или полиэтиленовым волокном для того, чтобы избежать кратковременную потерю контакта между ними в процессе движения, поскольку в некоторый момент сильного сокращения активные составляющие мышцы могут отсоединяться от нерва, подающего сигнал, что приведет к снижению амплитуды сокращения.Таким образом, искусственный нерв является двигательным или смешанным (по аналогии с живым нервом) в случае, если он одним концом либо в целостном состоянии, либо в разветвленном вшит в искусственные мышцы таким образом, что оголенные от полимерного диэлектрика части упомянутого нерва имеют соприкосновение с нитями интерметаллидов и нейлоновым и/или полиэтиленовым волокном. В таком случае возможность нерва управлять мышцами обеспечивается за счет отсутствия электрической изоляции между ними. Искусственный нерв является чувствительным или смешанным в случае, если он одним концом присоединен к матрице пьезоэлектриков. Как упоминалось выше, это приводит к созданию сигнала-чувства. Исходя из вышеизложенного следует, что вид искусственного нерва (двигательный, смешанный, чувствительный) предопределен его взаимосвязью с частями искусственных мышц и с матрицей пьезоэлектриков.
С целью дополнительной защиты и придания внешнего вида в качестве оболочки бионической конечности может служить искусственная кожа, представляющая собой слой латекса, непосредственно в который можно встроить матрицы пьезоэлектриков. В таком случае искусственная кожа сможет копировать осязательные функции настоящей кожи и более-менее соответствовать ее внешнему виду.
Если слой латекса будет дополнительно содержать, по меньшей мере, один катализатор полимеризации, то после повреждений он сможет регенерироваться.
Бионическая конечность может содержать искусственный скелет, представляющий собой изделия в форме костей, шарнирно соединенные между собой. Упомянутые изделия также должны быть соединены между собой искусственными мышцами таким образом, чтобы при сокращении мышц происходило движение изделий относительно друг друга. Вместе с тем желательно, чтобы обеспечивался максимальный сгиб конечности и при этом, чтобы усилие на разгиб не было слишком сильным, то есть чтобы искусственный сустав не выворачивался.Шарнирные соединения во избежание утечки смазки лучше делать закрытыми. В качестве смазки рекомендуется использовать графит или силиконовую смазку.
Искусственный скелет лучше изготавливать из антифрикционного сплава на основе алюминия или сплава с высоким содержанием графита, поскольку подобные сплавы обладают высокой ударной вязкостью и прочностью, легкостью и низкой стоимостью. Графит, выделяющийся при трении изделий в шарнирных соединениях, может играть роль смазки.
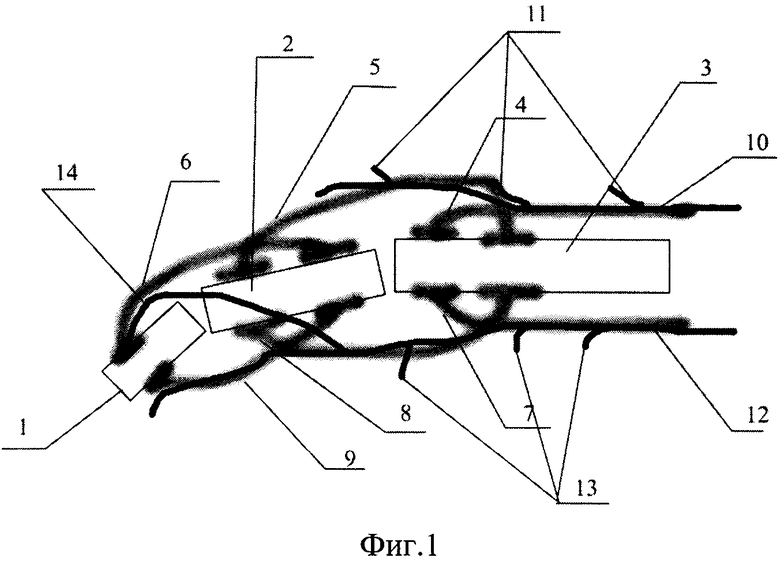
Предложенная бионическая конечность проиллюстрирована на фигурах 1-3, на которых она представляет собой указательный палец правой руки.
На фигуре 1 изображена схема левой стороны бионического указательного пальца, точно копирующей правую сторону.
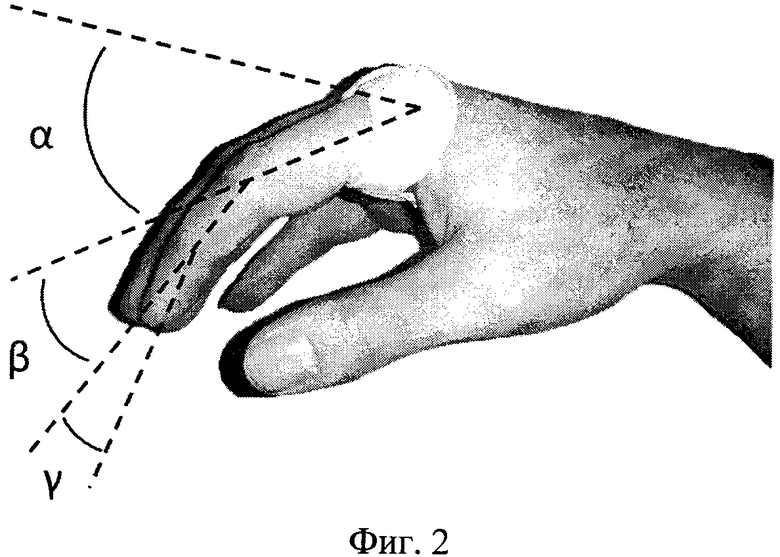
На фигуре 2 изображен бионический указательный палец в расслабленном состоянии.
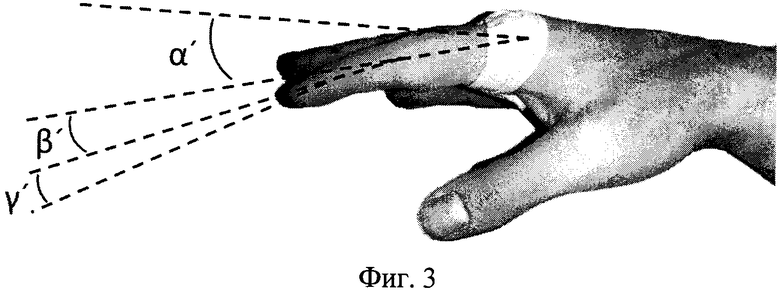
На фигуре 3 изображен бионический палец в разогнутом состоянии.
Цифрами на фигурах обозначены следующие элементы:
1-3 - детали в форме костей,
4-9 - искусственные мышцы,
10, 12 - искусственные нервы,
11, 13 - малые отростки искусственных нервов,
14 - большой отросток искусственного нерва.
Углы α, β, γ характеризуют расслабленное состояние, а углы α′, β′, γ′ характеризуют разогнутое состояние бионического пальца. Угол α (α′) представляет собой угол между осью пястной кости и осью детали 3. Угол β (β′) представляет собой угол между осью детали 3 и осью детали 2. Угол γ (γ′) представляет собой угол между осью детали 2 и осью детали 1.
Осуществление изобретения.
В примере 1 раскрывается способ изготовления искусственного нерва без вещества, поддерживающего и усиливающего входящий импульс.В примере 2 раскрывается способ изготовления искусственного нерва с добавлением поливинилиденфторида.
В примерах 3-7 раскрывается способ изготовления искусственных мышц. В примере 8 раскрывается способ изготовления бионической конечности.
Пример 1.
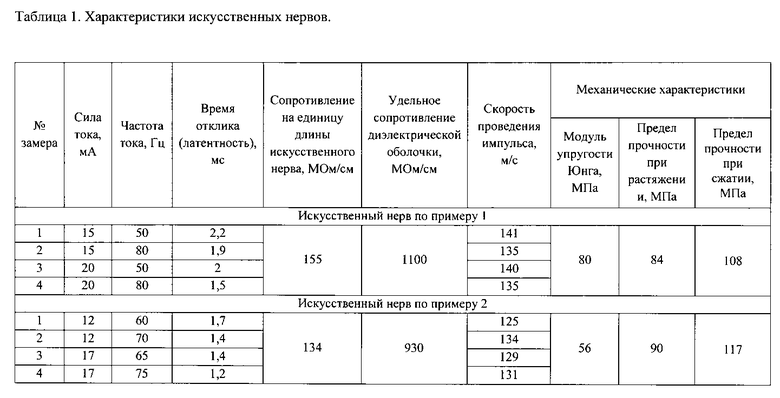
Был изготовлен искусственный нерв длиной 10 см, толщиной (без учета диэлектрика) 1,5 мм. Вначале произвели смешивание полипиррола, полиазулена и вспенивателя при следующем соотношении компонентов, мас. %: политиофен 20 поли-α-нафтиламин 74 вспениватель 6.
В качестве вспенивателя использовали порофор марки ДФ-3. Полученную смесь постепенно нагревали до температуры 240°C, то есть до температуры, достаточной для разложения порофора, выдержали в течение 4-х минут - до завершения процесса сквозного порообразования, остудили до температуры 150°C и начали пропускать через фильеру диаметром 1,5 мм. После фильеры полученную нить охладили до температуры 60°C, подрезали до нужного размера и в течение 5 минут пропитывали нагретым до температуры 60°C раствором, содержащим 9 мас. % NaCl и 9 мас. % KCl. Затем нить обвили слоем диэлектрика, состоящим из политетрафторэтилена, толщиной 25 мкм, остудили до комнатной температуры, на концы нанесли катионообменную мембрану МФ-4СК и поместили указанные концы в раствор, содержащий 9 мас. % NaCl и 9 мас. % KCl.
С нерва частично сняли слой политетрафторэтилена.
Пропуская ток 4-х режимов посредством соприкосновения игольчатых электродов с оголенными от диэлектрической оболочки участками, определяли время отклика, сопротивление и скорость проведения импульса. Пропуская ток посредством соприкосновения игольчатых электродов с целостными участками нити, вычисляли удельное сопротивление диэлектрической оболочки.Также проводились исследования на упругость, прочность при растяжении и сжатии.
Измеренные характеристики искусственного нерва представлены в таблице 1.
Пример 2.
Был изготовлен искусственный нерв длиной 25 см, толщиной (без учета диэлектрика) 2,5 мм. Искусственный нерв являлся аналогом хвостового нерва кошки.
Вначале произвели смешивание полипиррола, полиазулена и вспенивателя при следующем соотношении компонентов, мас. %:
полипиррол 60
политиофен 33
вспениватель 7.
В качестве вспенивателя использовали порофор n-толуолсульфонилсемикарбазид (PTSS). Полученную смесь постепенно нагревали до температуры 260°C, то есть до температуры, достаточной для разложения порофора, выдержали в течение 4-х минут - до завершения процесса сквозного порообразования, и остудили до температуры 150°C. Затем добавили в нее нановолокна поливинилиденфторида в количестве 9 мас. % и начали пропускать через фильеру диаметром 2,5 мм. После фильеры полученную нить охладили до температуры 60°C, подрезали до нужного размера и в течение 5 минут пропитывали нагретым до температуры 60°C раствором, содержащим 7 мас. % NaCl и 7 мас. % KCl. Затем нить обвили слоем диэлектрика, состоящим из полистирола и стирол-бутадиен-стирола, толщиной 20 мкм, остудили до комнатной температуры, на концы нанесли катионообменную мембрану марки МК-40, и поместили указанные концы в раствор, содержащий 7 мас. % NaCl и 7 мас. % KCl. С нерва частично сняли слой полистирола и стирол-бутадиен-стирола. Пропуская ток 4-х режимов посредством соприкосновения игольчатых электродов с оголенными от диэлектрической оболочки участками, определяли время отклика, сопротивление и скорость проведения импульса. Пропуская токпосредством соприкосновения игольчатых электродов с целостными участками нити, вычисляли удельное сопротивление диэлектрической оболочки. Как видно из полученных данных (таблица 1), нервы, полученные по примерам 1-2, обладают высокими значениями латентности, удельного сопротивления диэлектрической оболочки, скорости проведения импульса, а также приемлемыми механическими характеристиками, свидетельствующими о хорошей гибкости и исключающими быстрый износ.
Вместе с тем полученные данные показывают, что латентность и скорость проведения импульса можно дополнительно увеличить, если включить в состав нерва поливинилиденфторид.
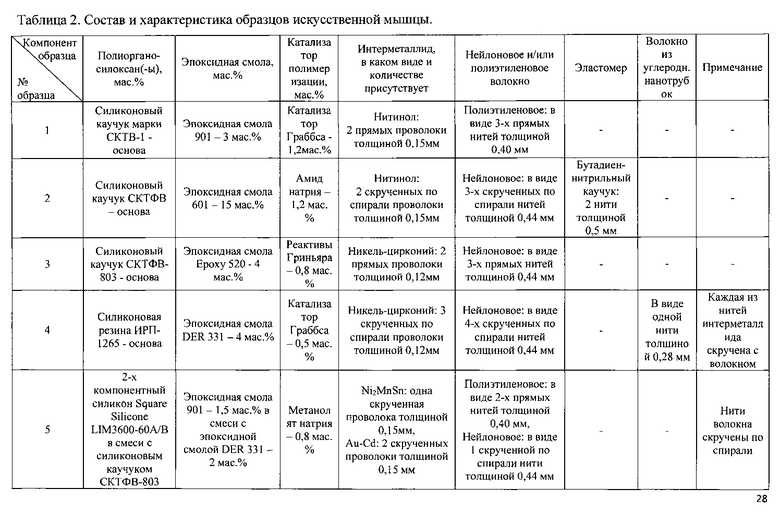
Примеры 3-7.
Было изготовлено 5 образцов цилиндрической формы размером 40×7 мм. Вначале при температуре плавления полиорганосилоксана произвели смешивание полиорганосилоксана, эпоксидной смолы и катализатора полимеризации. Полученную смесь загрузили в цилиндрическую форму, остудили до температуры 65°C, прошили ее насквозь вдоль оси цилиндра нитями интерметаллида, нитями эластомера, волокном из углеродных нанотрубок, нейлоновым и полиэтиленовым волокном, после чего полученную заготовку остудили до комнатной температуры и извлекли из формы. Прошивку производили либо прямой иглой, либо иглой, выполненной по спирали. Состав и характеристика образцов представлены в таблице 2.
Образцы прошили насквозь 2-мя проводками токопроводящего полимера - политиофена, таким образом, что проводки имели площадь соприкосновения с каждой нитью интерметаллида, нейлоновым и/или полиэтиленовым волокном и волокном из углеродных нанотрубок.
Верхнюю часть образца со вставленными в него проводками закрепили в сдавливающем металлическом кольце, а провода из токопроводящего полимера подключили к источнику питания.
Через нижнюю часть образца продели капроновую нитку с подвешенной гирькой весом 250 г.
Далее на образец начали подавать ток по следующему режиму: 1,5 секунды -подача тока, 1 секунда - пауза, при этом после третьего импульса замерялись время задержки сигнала (время отклика), скорость и степень сокращения искусственной мышцы. Первые два импульса не брались в расчет, поскольку интерметаллиды еще не "запомнили" движение-сокращение.
Сделав несколько замеров, образцы обдували теплым воздухом (около 50°C) в течение 10 секунд и в это время также измеряли скорость и степень сокращения искусственной мышцы.
Также измеряли эти параметры и при одновременной подаче тока и температурном нагреве.
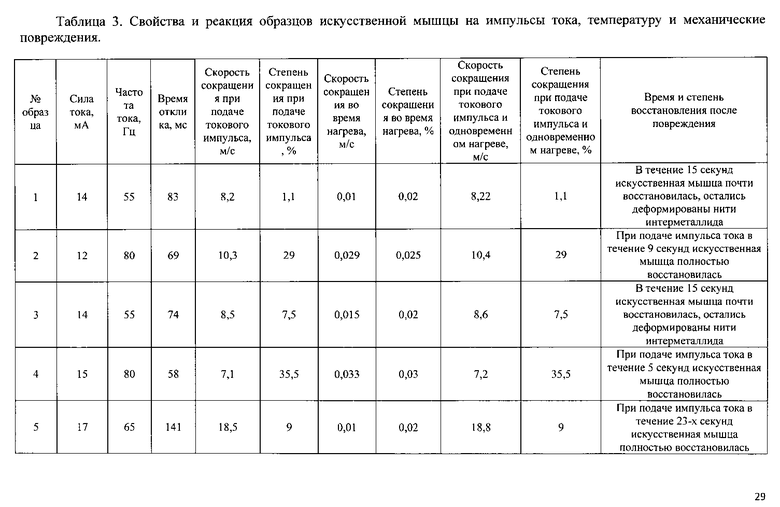
После этого образцам нанесли повреждения: в средней его части сделали прорезь, повредив нити и волокна. Затем 1-ый и 3-ий образцы оставили в покое, а на 2-ой, 4-ый и 5-ый начали подавать ток в третий раз по тому же режиму. Характеристика подаваемого тока, свойства и реакция искусственной мышцы на импульсы тока, температуру окружающей среды и повреждения приведены в таблице 3.
Согласно полученным данным, бионическая мышца обладает незначительным временем отклика, она способна сокращаться под действием слабых электрических импульсов, причем степень бесконтрольного сокращения под действием температуры окружающей среды настолько мала, что ею можно пренебречь.
Также мышца обладает свойством самовосстановления в короткий промежуток времени, причем при подаче токового сигнала скорость и степень восстановления увеличиваются. На скорость ответной реакции мышцы на токовые импульсы влияют такие параметры, как частота тока, а также геометрия расположения интерметаллидных нитей и волокна: если их скрутить по спирали, и даже более того, если их скрутить по спирали друг вокруг друга, то скорость реакции мышцы увеличится.
При наличии нитей эластомера все вышеописанные характеристики мышцы остаются примерно такими же, однако ее движения становятся более сглаженными.Как показали примеры 1-7, искусственный нерв обладает сниженным временем отклика и сопротивлением, а также достаточной упругостью и прочностью; искусственная мышца обладает малым временем отклика и возможностью быстрого сокращения под действием электрических импульсов, в частности с плотностью тока до 20 мА/см2 (приблизительно соответствует плотности тока живых нервных импульсов), она практически не подвержена бесконтрольному сокращению под действием температуры окружающей среды и, кроме того, обладает свойством самовосстановления, обусловленным как природой интерметаллидов с памятью формы, так и наличием в ней эпоксидной смолы и катализатора полимеризации.
Исходя из вышеизложенного следует, что и искусственный нерв и искусственная мышца могут позволить предложенной бионической конечности принимать электрические импульсы, идущие непосредственно от нерва, обеспечивать относительно высокую точность и пластичность движений, возможность осязать и чувствовать температуру, а также обеспечить малое время отклика исполнительных органов.
Пример 8.
Была изготовлена бионическая конечность (см. фиг. 1-3), представляющая собой указательный палец правой руки длиной 82 мм, диаметром основания 18 мм, диаметром средней части - 16 мм.
Искусственные нервы были изготовлены следующим образом.
Вначале произвели смешивание полипиррола, полиазулена и вспенивателя при
следующем соотношении компонентов, мас. %:
полипиррол 60
полиазулен 33
вспениватель 7.
В качестве вспенивателя использовали азодикарбонамид в виде порофора ЧХ3-21.
Полученную смесь постепенно нагревали до температуры 210°C, то есть до температуры разложения порофора, выдержали в течение 4-х минут - дозавершения процесса сквозного порообразования, и остудили до температуры 150°C, то есть до температуры, при которой не разлагаются в дальнейшем вводимые нановолокна. После этого в смесь добавили нановолокна поливинилиденфторида в количестве 5 мас. % и начали пропускать смесь через фильеру диаметром 1,2 мм, позволяющую создавать разветвленные нити. Полученную нить охладили до температуры 60°C, подрезали до нужного размера и в течение 5 минут пропитывали нагретым до температуры 60°C раствором, содержащим 7 мас. % NaCl и 5 мас.% KCl. Затем нить обвили слоем диэлектрика, состоящим из полистирола и стирол-бутадиен-стирола, толщиной 20 мкм, и остудили до комнатной температуры.
Таким методом были изготовлены аналоги ответвлений срединного и лучевого нервов, проходящие в указательном пальце, а именно: 2 ветви лучевого нерва длинной по 40 мм с 3-мя отходящими отростками длиной 3-4 мм на каждой ветви, 2 ветви срединного нерва длинной по 75 мм. Каждая искусственная ветвь срединного нерва имела 3 отходящих отростка длиной 3-4 мм и 1 отросток длиной 30 мм, отходящий примерно от середины ветви. Искусственный скелет был изготовлен следующим образом. Из антифрикционного сплава на основе алюминия AO9-2Б были отлиты 3 детали, повторяющие форму костей настоящего указательного пальца и шарнирно соединенные между собой, причем соединения были смазаны графитом. Расположенная с толстого конца деталь была выполнена с возможностью шарнирного соединения с пястной костью. Детали имели следующий размер:
1-я: толщина в средней части 4 мм, длина 15 мм;
2-я: толщина в средней части 6 мм, длина 25 мм;
3-я: толщина в средней части 6 мм, длина 40 мм.
Было изготовлено 12 искусственных мышц цилиндрической формы: 4 - длиной 5 см, 4 - длиной 4 см, 4 - длиной 3,5 см. Вначале произвели плавление полиорганосилоксана и смешали его с эпоксидной смолой марки 601 и катализатором полимеризации - амидом натрия. Полученную смесь загрузили в цилиндрические формы, остудили до температуры 65°С, прошили каждуюзаготовку насквозь вдоль оси цилиндра 2-мя скрученными по спирали нитями интерметаллида Ni-Ti толщиной 0,15 мм, скрученной по спирали нитью интерметаллида Ni-Zr толщиной 0,12 мм, 2-мя прямыми нитями бутадиен-нитрильного каучука (эластомера) толщиной 0,5 мм, а также нейлоновым волокном в виде 3-х скрученных по спирали нитей толщиной 0,44 мм. Во время прошивания каждая нить и волокно частично обмазывались клеем на основе эпоксидной смолы УП-5-177-1.
Полученные заготовки остудили до комнатной температуры и извлекли из формы. В зависимости от вида, который следовало придать нити, прошивку производили либо прямой иглой, либо иглой, выполненной по спирали. Содержание эпоксидной смолы 601 в каждой изготовленной искусственной мышце составило 15 мас. %, амида натрия - 1,2 мас. %.
Искусственные мышцы приклеивались к деталям из сплава марки AO9-2Б посредством клея остеопласта, представляющего собой резорциновые эпоксидные смолы с органическими наполнителями (фибринный порошок, сухая плазма крови, костная мука, суперфосфат, фосфорная мука, индифферентные порошкообразные металлы), при этом они приклеивались симметрично - 6 мышц приклеивались с левой стороны, 6-с правой. Структура полученной бионической конечности поясняется чертежом (фигура 1), на котором изображена ее левая сторона, точно копирующая правую. Мышцы 4 и 7, соответственно, сверху и снизу одним концом приклеивались к дальнему от ладони концу детали 3. Мышцы 5 и 8, соответственно, сверху и снизу склеивали с дальним от ладони концом детали 2 и средней частью детали 3. Мышцы 6 и 9, соответственно, сверху и снизу склеивали со средней частью детали 1 и ближним к ладони концом детали 2. У нервов 10 и 12 частично сняли слой диэлектрика и произвели ими иннервацию мышц посредством вшивания металлической иглой таким образом, чтобы оголенные участки соприкасались с интерметаллидными нитями и нейлоновым волокном. Слой диэлектрика также был снят с концов малых отростков 11 и 13 нервов, с конца большого отростка 14 и с концов основных нервов. Большой отросток 14 аналога ветви срединного нерва был прошит через верхнюю мышцу 6.На концы нервов 10 и 12, предназначенные для соединения с ладонью, была нанесена катионообменная мембрана марки МК-40. Все остальные концы были спаяны с матрицей пьезоэлектриков, представляющую собой нити нановолокон поливинилиденфторида, вшитые в латексную оболочку, обтягивающую бионический палец. Спайку производили посредством тончайшей раскаленной стальной иглы.
После того как на поверхность мышц была натянута латексная оболочка, конечность приготовили к установке пациенту, больше года назад целиком лишившегося указательного пальца правой руки из-за производственной травмы. Хирургу было предложено пришить бионический палец таким образом, как будто он являлся настоящим.
Для этого пациенту под местным наркозом активировали оборванные концы нервов и оголили сустав пястной кости. Шаровидную головку упомянутой кости поместили в шарнирное сочленение детали 3.
Механическим способом сделали на концах искусственных нервов, покрытых катионообменной мембраной, углубление, поместили в это углубление активированные концы живого нерва таким образом, чтобы и волокно и оболочка последнего имели соприкосновение с электропроводящим полимером, но при этом чтобы поры полимера были полностью закрыты мембраной. Затем посредством наложения эпиневральных швов соединили четыре конца живых нервов с их искусственными аналогами. Свободные концы 4-х мышц 10 и 12 соединили с пястной костью клеем остеопластом. Кожные покровы были сшиты с латексной оболочкой конечности и приклеены латексным тканевым клеем (ЛТК).
По истечении примерно часа после операции пациент уже мог совершать медленные движения в направлении, в котором хотел.
По истечении нескольких часов он мог совершать пластичные и точные сгибательные и разгибательные движения, движения в сторону, а также регулировать скорость и усилие движений, при этом он мог чувствовать соприкосновение и тепло, охарактеризовав свои ощущения: "как-то необычно, но чувствую". Возможность совершать разнообразные движения говорит о том,что искусственные мышцы имеют высокую восприимчивость к силе и частоте нервных импульсов.
По истечении нескольких дней можно было сделать заключение о том, что палец практически прижился.
Был проведен опыт на время отклика протеза. По хлопку, предварительно расслабив бионический палец (как показано на фиг. 2), пациент должен был сделать им максимально резкое разгибание (как показано на фиг. 3). Было произведено 3 замера - время отклика составило: 590, 489 и 512 мс. Это значительно меньше, чем у любого из существующих протезов-аналогов, однако несколько дольше реакции живого пальца. С учетом того, что после операции прошло мало времени, углы разогнутой конечности α′, β′, γ′, изображенные на фиг. 3, являются допустимыми.
Как показали испытания еще невживленных искусственных нервов, осуществляемые посредством игольчатых электродов, их время отклика при силе тока 10-20 мА и его частоте 50-80 Гц может составлять около 2 мс. Время отклика мышц составляет около 80 мс. Таким образом, практическое время отклика конечности сильно отличалось от теоретического. Однако стоит учитывать, что определенное время отклика представляет собой время отклика не только конечности, но всего пациента в целом. Несмотря на это, свойства протеза, такие как "память" интерметаллидов и возможность тканей живых нервов срастаться с биосовместимыми тканями искусственных нервов, способствуют тому, что при разработке и тренировке пациентом конечности она сможет быстрее реагировать на импульсы мозга, двигаться с большей амплитудой и лучше чувствовать соприкосновение, то есть для предложенного бионического аналога существует возможность развития, аналогичная возможности развития живых конечностей.
Как показал опыт, установка предложенного протеза не требует больших трудозатрат, как в случае протеза-прототипа, на установку которого может уйти много часов, что связано с необходимостью подключения множества дорогих сенсоров, требующих подпитки от источника питания, в различные части мышц и нервов.Кроме того, стоит отметить относительно низкую себестоимость предложенной конечности. Стоимость одного из интерметаллидов с памятью формы, например, нитинола, составляет примерно 11500 рублей за килограмм. На изготовление пальца понадобилось 24 проводка толщиной 0,015 см и общей длиной 100 см. Их объем составил V=100*((0,015/2)2*π)=0,018 см3. Масса составила m=ρ*V=6,4*0,018=0,115 г. Стоимость такого количества нитинола составляет 1 руб. 32 коп.
Изготовление конечности может оказаться трудоемким и сложным только в случае ручного изготовления на заказ, однако эту проблему можно решить, применяя серийное производство. Различные протезы можно выпускать стандартных размеров: в таком случае они будут недорогими и универсальными. Помимо медицины изобретение может найти применение в различных отраслях машиностроения и робототехники, в частности в производстве манипуляторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСКУССТВЕННЫЙ НЕРВ | 2014 |
|
RU2564558C1 |
| Конструкция соединения искусственных нервов с искусственными мышцами | 2017 |
|
RU2653800C1 |
| ИСКУССТВЕННЫЙ НЕРВ С ФУНКЦИЕЙ ВОССТАНОВЛЕНИЯ СИНАПТИЧЕСКИХ СВЯЗЕЙ | 2015 |
|
RU2609049C1 |
| Искусственная мышца с улучшенной точностью движений | 2017 |
|
RU2654680C1 |
| ИСКУССТВЕННАЯ МЫШЦА | 2014 |
|
RU2563815C1 |
| Бионический экзоскелет | 2017 |
|
RU2645804C1 |
| ИСКУССТВЕННАЯ СЕТЧАТКА И БИОНИЧЕСКИЙ ГЛАЗ НА ЕЁ ОСНОВЕ | 2014 |
|
RU2567974C1 |
| ЛИНЕЙНЫЙ АКТУАТОР ДЛЯ УСТРОЙСТВА ИСКУССТВЕННОЙ РУКИ | 2021 |
|
RU2791805C1 |
| Способ имплантации искусственного зуба | 2017 |
|
RU2649452C1 |
| СРЕДСТВО ДЛЯ ЛЕЧЕНИЯ НЕЙРОСЕНСОРНОЙ ПОТЕРИ СЛУХА (ВАРИАНТЫ) | 2015 |
|
RU2614487C1 |
Группа изобретений относится к области бионики и касается создания бионической конечности. Предложенная конечность включает искусственный скелет, представляющий собой изделия в форме костей, соединенные между собой шарнирно, а также прикрепленными к ним исполнительными органами. В качестве последних служат искусственные мышцы и нервы. Мышцы содержат нити интерметаллидов с памятью формы и нейлоновое и/или полиэтиленовое волокно. Нервы содержат электропроводящий полимер со сквозной пористостью и одним концом вшитых в искусственные мышцы. Предложен также способ изготовления бионической конечности. Искусственные нервы готовят посредством смешивания вспенивателя и по крайней мере одного органического электропроводящего полимера. Полученную смесь нагревают до температуры разложения вспенивателя, выдерживают до завершения процесса образования сквозных пор, остужают и пропускают через фильеру. Пропитывают полученную нить раствором ионов Na+ и К+, обвивают ее по крайней мере одним слоем полимерного диэлектрика. На один конец наносят катионообменную мембрану. Искусственные мышцы готовят посредством прошивания среды из по крайней мере одного полиорганосилоксана одной или более нитями по крайней мере одного интерметаллида с памятью формы, а также нейлоновым и/или полиэтиленовым волокном. Далее вшивают искусственные нервы в искусственные мышцы таким образом, чтобы оголенные от полимерного диэлектрика участки двигательных и/или смешанных нервов соприкасались с нитями интерметаллидов и нейлоновым и/или полиэтиленовым волокном. Концы чувствительных и/или смешанных нервов без нанесенной мембраны соединяют с матрицей пьезоэлектриков. Изобретения обеспечивают точность и пластичность движений, возможность осязать и чувствовать температуру, приживаемость конечности и упрощение ее установки. 2 н. и 8 з.п. ф-лы, 8 пр., 3 табл., 3 ил.
1. Бионическая конечность, состоящая из элементов, передающих входящий сигнал исполнительным органам, и исполнительных органов, отличающаяся тем, что она содержит искусственный скелет, представляющий собой изделия в форме костей, соединенные между собой шарнирно, а также соединенные прикрепленными к ним исполнительными органами, в качестве которых служат искусственные мышцы, представляющие собой среду из по меньшей мере одного полиорганосилоксана, прошитую одной или более нитями, по крайней мере одного интерметаллида с памятью формы и нейлоновым и/или полиэтиленовым волокном, в качестве элементов, передающих входящий сигнал, служат искусственные нервы по крайней мере двух типов, выбранных из группы: чувствительные, двигательные и смешанные, причем искусственные нервы представляют собой среду из по крайней мере одного органического электропроводящего полимера, упомянутая среда обладает сквозной пористостью с порами, заполненными раствором ионов натрия и калия, и обвита по крайней мере одним слоем полимерного диэлектрика, двигательные и/или смешанные искусственные нервы одним концом либо в целостном состоянии, либо в разветвленном вшиты в искусственные мышцы таким образом, что оголенные от полимерного диэлектрика части искусственных нервов имеют соприкосновение с нитями интерметаллидов и нейлоновым и/или полиэтиленовым волокном, чувствительные и/или смешанные искусственные нервы одним концом присоединены к матрице из пьезоэлектриков, на другие концы всех искусственных нервов нанесена катионообменная мембрана, пропускающая ионы щелочных металлов.
2. Конечность по п.1, отличающаяся тем, что оголенные от полимерного диэлектрика части искусственных нервов сплетены с нитями интерметаллидов и нейлоновым и/или полиэтиленовым волокном.
3. Конечность по п.1, отличающаяся тем, что искусственный скелет выполнен из антифрикционного сплава на основе алюминия или сплава с высоким содержанием графита.
4. Конечность по п.1, отличающаяся тем, что она дополнительно содержит оболочку, в качестве которой служит искусственная кожа, представляющая собой слой латекса со встроенными в него матрицами пьезоэлектриков.
5. Конечность по п.4, отличающаяся тем, что слой латекса дополнительно содержит по меньшей мере один катализатор полимеризации.
6. Конечность по п.1, отличающаяся тем, что искусственные мышцы представляют собой среду из по меньшей мере одного полиорганосилоксана и дополнительно введенных по меньшей мере одной эпоксидной смолы и по меньшей мере одного катализатора полимеризации.
7. Конечность по п.1, отличающаяся тем, что искусственные нервы дополнительно содержат нановолокна поливинилиденфторида.
8. Конечность по п.1, отличающаяся тем, что матрица из пьезоэлектриков представляет собой матрицу нановолокон поливинилиденфторида.
9. Способ изготовления бионической конечности по п.1, отличающийся тем, что искусственные нервы готовят посредством смешивания вспенивателя и по крайней мере одного органического электропроводящего полимера, полученную смесь нагревают до температуры разложения вспенивателя, выдерживают до завершения процесса образования сквозных пор, остужают и пропускают через фильеру, пропитывают полученную нить раствором ионов Na+и К+, обвивают ее, по крайней мере, одним слоем полимерного диэлектрика и на один конец наносят катионообменную мембрану, пропускающую ионы щелочных металлов, искусственные мышцы готовят посредством прошивания среды из по крайней мере одного полиорганосилоксана одной или более нитями по крайней мере одного интерметаллида с памятью формы, а также нейлоновым и/или полиэтиленовым волокном, далее вшивают искусственные нервы по крайней мере двух типов, выбранных из группы: чувствительные, двигательные и смешанные, в искусственные мышцы таким образом, чтобы оголенные от полимерного диэлектрика участки двигательных и/или смешанных искусственных нервов соприкасались с нитями интерметаллидов и нейлоновым и/или полиэтиленовым волокном, концы чувствительных и/или смешанных искусственных нервов без нанесенной катионообменной мембраны, пропускающей ионы щелочных металлов, соединяют с матрицей пьезоэлектриков, при этом искусственные мышцы соединяют с искусственным скелетом.
10. Способ по п.9, отличающийся тем, что при приготовлении искусственных мышц предварительно производят плавление полиорганосилоксана и его смешение с по крайней мере одной эпоксидной смолой и с по крайней мере одним катализатором полимеризации с последующим охлаждением полученной смеси.
| WO 2006101445 A1, 28.09.2006 | |||
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 2010 |
|
RU2427349C1 |
| ЭСТЕРАЗЫ И ИХ ПРИМЕНЕНИЕ | 2020 |
|
RU2829537C2 |
| CN 201602914 U, 13.10.2010 | |||
| Бионическая рука вернула датчанину чувство осязания, 08.02.2014 | |||
| Деревянный коленчатый рычаг | 1919 |
|
SU150A1 |
| Bionic arm | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Hutchinson DT The quest for the bionic arm | |||
| J Am Acad Orthop Surg | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |

