Изобретение относится к медицине и к медицинской технике, а конкретно к области хирургии и предназначено для бионического протезирования и использования в качестве искусственных мышц.
Известна искусственная мышца по заявке на изобретение RU 97107496 от 05.05.1994, имеющая возможность сокращаться по длине, оболочку которой собирают из чередующихся продольных полос нерастяжимых лент с упругими лентами, концы которых крепятся с обеих сторон к двум или нескольким крепежным деталям и образуют герметичный воздушный мешок. Мышца сокращается за счет впуска и выпуска воздуха из мешка.
Известна искусственная мышца по патенту RU 2654680 от 07.06.2017, представляющая собой среду из полиорганосилоксана, эпоксидной смолы и катализатора полимеризации эпоксидной смолы, при этом указанная среда прошита нитями интерметаллида с памятью формы и нейлоновым и/или полиэтиленовым волокном, которые соединены с термоэлектрическим преобразователем продольной формы, расположенным вдоль указанного волокна.
Недостатком описанных устройств является сложность конструкции.
Наиболее близким к заявляемому изобретению является линейный актуатор, входящий в устройство искусственной руки по патенту RU 2717046 от 13.06.2019. Оно содержит линейные актуаторы по количеству пальцев на руке, модуль управления, который является и источником питания и управляет направлением вращения электродвигателей, ремни, кольца и напальчники для крепления перчатки на конечности и соединительные элементы для обеспечения механический связи моторов с кольцами и напальчниками. Соединительные элементы являются гибкими штоками в виде скрученных нитей, которые одними своими концами закреплены на валах моторов, размещенных на большом браслете, а другими своими концами пропущены через сквозные отверстия в малом браслете и жестко прикреплены к напальчникам.
Недостатками описанного прототипа являются низкая надежность вследствие большой силы взаимного трения нитей в гибких штоках при скручивании и обусловленный этой причиной низкий коэффициент полезного действия устройства, а также негативное воздействие пыли окружающей среды на гибкие штоки.
Задача изобретения - увеличение коэффициента полезного действия и ресурса работы линейного актуатора за счет уменьшения силы трения нитей в гибком штоке при скручивании и защита его от пыли.
Технический результат достигается тем, что в линейный актуатор для устройства искусственной руки, содержащий модуль управления, являющийся и источником питания, и соединительный элемент, представляющий собой гибкий шток в виде скрученных нитей, который одним своим концом закреплен на валу электродвигателя, соединенного с модулем управления, а другим своим концом жестко прикреплен к имитатору кисти руки, введена эластичная трубка, а нити гибкого штока обработаны смазкой для уменьшения силы взаимного трения нитей друг о друга при скручивании и помещены в эластичную, например, латексную, трубку, изолирующую их от пыли окружающей среды и предотвращающую разбрызгивание смазки с поверхности скрученных нитей в процессе работы, а нити гибкого штока выполнены из полиэтилена, модуль управления представляет собой выполненные в одном корпусе электрически связанные блок питания, контроллер и электропривод и формирует управляющий сигнал, обеспечивающий регулирование скорости и направления вращения электропривода в заданных пределах.
Достигается увеличение КПД и ресурса работы актуатора.
Заявляемое изобретение иллюстрируется чертежами:
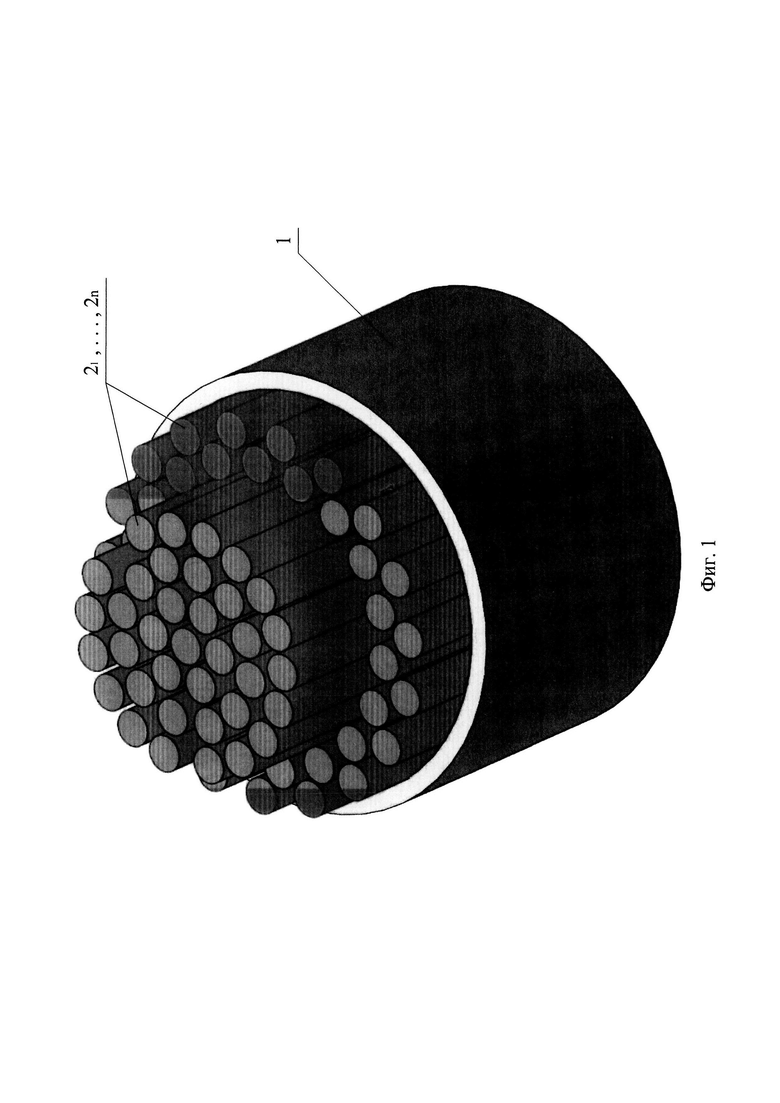
- фиг.1 - структура гибкого штока в исходном состоянии;
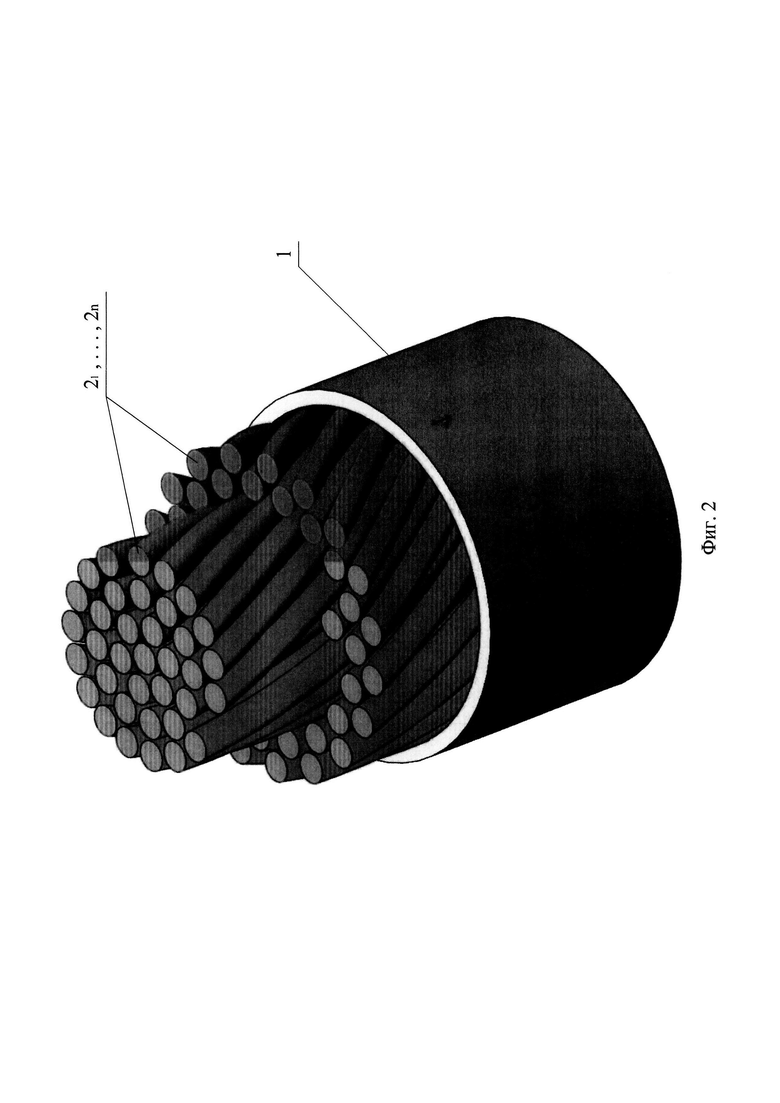
- фиг.2 - структура гибкого штока в рабочем состоянии;
- фиг.3 - конструкция линейного актуатора в виде действующего макета искусственной руки в исходном положении;
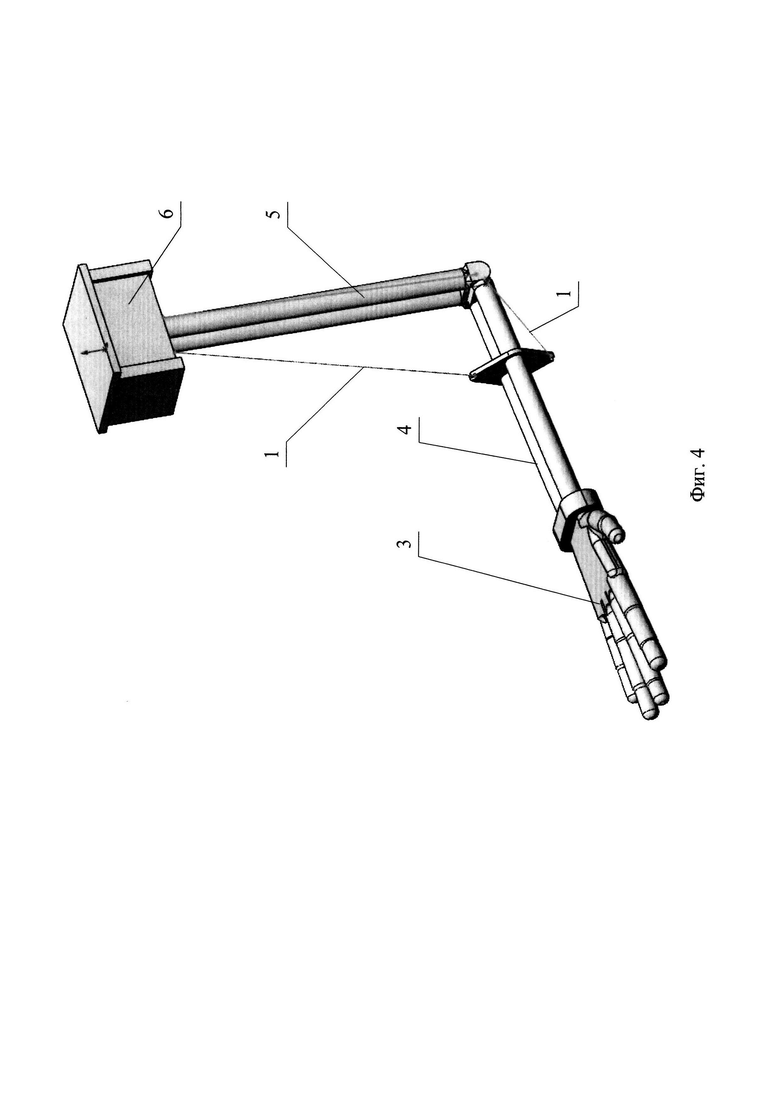
- фиг.4 - конструкция линейного актуатора в виде действующего макета искусственной руки в рабочем положении.
На фиг.1-4 использованы следующие обозначения: 1 - гибкий шток в виде эластичной трубки; 21…2n - нити; 3 - кисть руки; 4 - предплечье; 5 - плечо; 6 - модуль управления, при этом модуль управления включает в себя блок питания, контроллер и электропривод, гибкий шток одним своим концом прикреплен к валу редуктора, связанного с валом электродвигателя, электрически соединенного с модулем управления, а другим своим концом, через плечо, локтевой сустав и предплечье, жестко прикреплен к имитатору кисти руки.
Заявляемое устройство работает следующим образом (см. фиг.4). При включении блока питания управляющий сигнал с модуля управления 7 подается на управляющую обмотку электродвигателя (на фиг.1 - 4 не показан), обеспечивая регулирование скорости и направления его вращения по заданной программе, в результате чего достигают заданного темпа сгибания/разгибания искусственной руки, состоящей из механические соединенных кисти 3, предплечьем 4 и плечом 5 с заданными амплитудой и частотой. При этом механическая связь реализована с помощью гибкого штока (см. фиг.1, 2) 1, состоящего из скрученных нитей 21…2n, обработанных минеральной смазкой и помещенных в эластичную трубку. Нити 2 гибкого штока 1 обработаны минеральной смазкой для уменьшения механического трения между ними и помещены в эластичную трубку для предотвращения разбрызгивания смазки в процессе работы и для защиты гибкого штока от воздействия пыли окружающей среды.
Введение в конструкцию линейного актуатора эластичной трубки и обработка нитей гибкого штока смазкой позволяют увеличить коэффициент полезного действия (КПД) устройства. В ходе эксперимента были получены следующие результаты. При потребляемой мощности электродвигателя в 10 Вт и при его КПД, равном 90%, полученное значение КПД на выходе устройства составило: при «сухом» штоке - 60%, при «смазанном» штоке - 80%. Таким образом, при смазанном штоке достигнуто повышение КПД на 20%.
В качестве нитей, составляющих гибкий шток, в процессе экспериментальных исследований были использованы углеродные нити, а также нити из шелка, капрона, полиамида, полиэстера и из полиэтилена. Наиболее износостойкими оказались нити из полиэтилена марки «dyneema» производства фабрики «Dutch state mines» (Голландия) и марки «spectra» фабрики «Allied signab (США).
Технический результат заключается в решении задачи изобретения, а именно, в увеличении коэффициента полезного действия устройства на 20% за счет уменьшения силы взаимного трения нитей в гибком штоке при скручивании и в обеспечении его защиты от пыли.

Изобретение относится к медицинской технике, предназначено для бионического протезирования и использования в качестве искусственных мышц и позволяет увеличить КПД и ресурс работы линейного актуатора за счет уменьшения силы трения нитей в гибком штоке при скручивании и защита его от пыли. Линейный актуатор содержит модуль управления и соединительный элемент, представляющий собой гибкий шток в виде скрученных нитей, который одним своим концом закреплен на валу электродвигателя, соединенного с модулем управления, а другим своим концом жестко прикреплен к имитатору кисти руки. Нити гибкого штока обработаны смазкой для уменьшения силы взаимного трения нитей друг о друга при скручивании и помещены в эластичную, например латексную, трубку, изолирующую их от пыли окружающей среды и предотвращающую разбрызгивание смазки с поверхности скрученных нитей в процессе работы, нити гибкого штока выполнены из полиэтилена. 4 ил.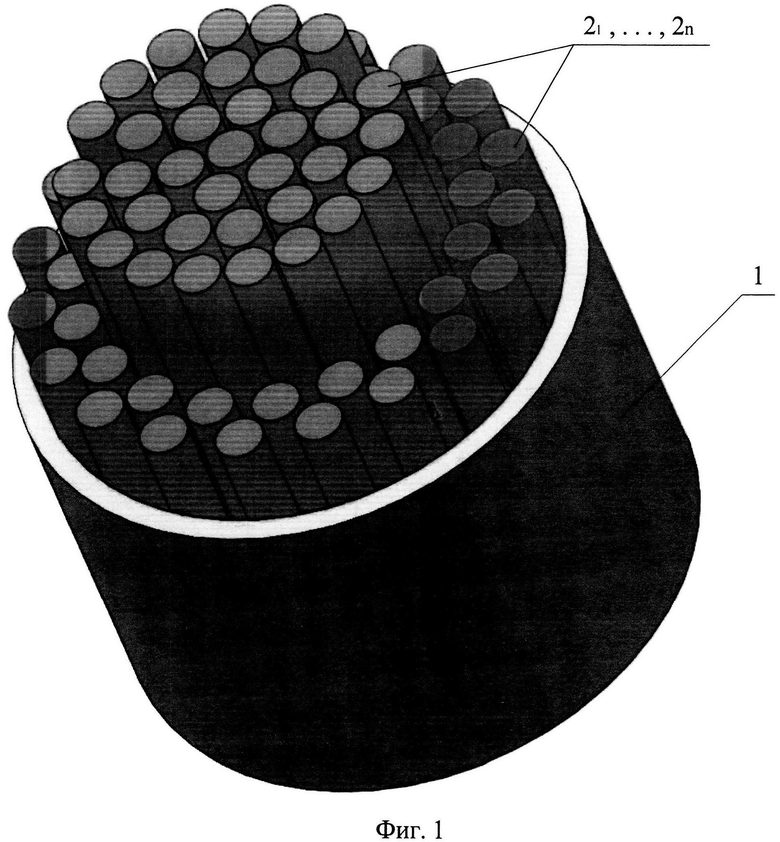
Линейный актуатор для устройства искусственной руки, содержащий модуль управления с источником питания и соединительный элемент, представляющий собой гибкий шток в виде скрученных нитей, который одним своим концом закреплен на валу электродвигателя, соединенного с модулем управления, а другим своим концом прикреплен к имитатору кисти руки, отличающийся тем, что гибкий шток представляет собой скрученные нити из полиэтилена, обработанные смазкой для уменьшения силы взаимного трения нитей друг о друга при скручивании и помещенные в эластичную трубку из латекса, изолирующую нити от пыли окружающей среды и предотвращающую разбрызгивание смазки с поверхности скрученных нитей в процессе работы, при этом модуль управления содержит размещенные в одном корпусе и электрически связанные блок питания, контроллер и электропривод и выполнен с возможностью формирования управляющего сигнала, обеспечивающего регулирование скорости и направления вращения электродвигателя.
| Перчатка-экзоскелет с линейными актуаторами | 2019 |
|
RU2717046C1 |
| Бионический экзоскелет | 2017 |
|
RU2645804C1 |
| СТОЙКИЙ К УСТАЛОСТИ ПРИ ИЗГИБЕ СОСТАВНОЙ ТРОС | 2018 |
|
RU2749526C1 |
| 0 |
|
SU88820A1 | |
| ЛАТЕКС, СОДЕРЖАЩИЙ ВОДУ И СТИРОЛЬНЫЙ БЛОК-СОПОЛИМЕР, И СПОСОБ ПОЛУЧЕНИЯ ИЗДЕЛИЙ ИЗ НЕГО | 2012 |
|
RU2632873C2 |
| US 20160259417 A1, 08.09.2016 | |||
| СТАНОК ДЛЯ ДОВОДКИ ПЛАСТИН | 0 |
|
SU181515A1 |

