Изобретение относится к радиолокации и может быть использовано в радиолокационных станциях (РЛС) управления воздушным движением и контроля воздушного пространства для обнаружения, измерения плоскостных координат и опознавания воздушных объектов (ВО), а также при модернизации РЛС метрового диапазона.
Известны РЛС метрового диапазона аналогичного назначения [1, 2]. Недостатками этих РЛС являются невысокие тактико-технические и эксплуатационные характеристики, что объясняется использованием в них устаревшей элементной базы, не соответствующей требованиям, предъявляемым к современным радиолокаторам.
Наиболее близкой по технической сущности и назначению к предлагаемой является РЛС кругового обзора метрового диапазона [3], принятая за прототип.
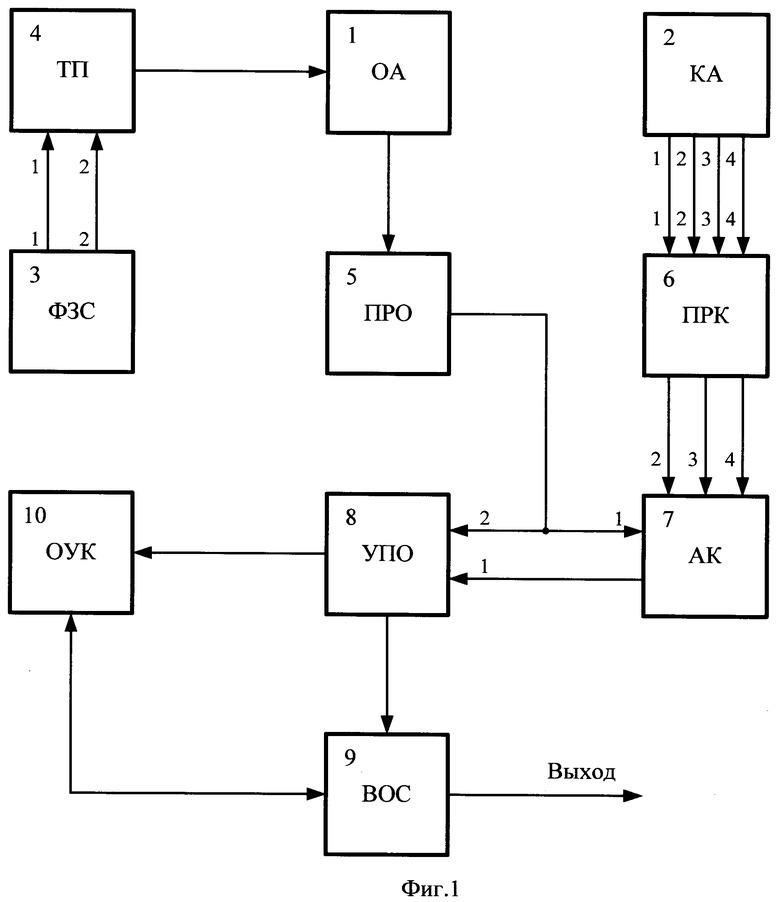
РЛС-прототип (Фиг.1) содержит основную антенну (ОА) 1, компенсационную антенну (КА) 2, формирователь зондирующих сигналов (ФЗС) 3, твердотельный передатчик (ТП) 4, приемник основного канала (ПРО) 5, приемник компенсационного канала (ПРК) 6, автокомпенсатор (АК) 7, устройство первичной обработки (УПО) 8, устройство вторичной обработки и сопряжения (ВОС) 9, устройство отображения, управления и контроля (ОУК) 10 с соответствующими связями.
ФЗС 3 прототипа формирует две последовательности зондирующих сигналов на одной несущей частоте с различной модуляцией: линейной частотной модуляцией и фазовой манипуляцией.
ТП 4 построен на базе герметичных модулей, наполненных инертным газом. ПРО 5 и ПРК 6 традиционно для РЛС метрового диапазона построены по супергетеродинной схеме с одним частотным преобразованием.
Компенсация активных шумовых помех (АШП) в РЛС-прототипе осуществляется с помощью трехканального корреляционного автокомпенсатора АК 7, использующего сигналы, поступающие через трехканальный ПРК 6 от трех из четырех излучателей КА 2, которые поочередно переключаются при вращении ОА 1.
Особенностью прототипа является также охлаждение аппаратного шкафа с размещенной в нем маломощной аппаратурой вместе с ТП 4, которое производится оборудованием приточно-вытяжной вентиляции, оснащенным холодильной установкой.
Недостатками прототипа являются:
- высокие трудоемкость изготовления и стоимость ТП 4, выполненного по технологии микроэлектроники в виде большого количества герметичных и наполненных инертным газом модулей;
- высокая вероятность возникновения перегревов в аппаратном шкафе из-за недостаточной надежности холодильной установки, что может привести к выходу из строя аппаратуры РЛС;
- незащищенность РЛС от воздействия АШП по заднему лепестку диаграммы направленности ОА 1;
- несоответствие современным требованиям ряда тактико-технических и эксплуатационных характеристик (помехозащищенность, разрешающая способность и точность измерения по дальности, производительность, надежность и др.).
Техническим результатом предлагаемого изобретения является расширение функциональных возможностей за счет повышения ряда тактико-технических и эксплуатационных характеристик (вероятность обнаружения, точность и разрешающая способность по дальности, помехозащищенность, производительность, надежность, ресурс и др.) при снижении трудоемкости изготовления и стоимости РЛС.
Для достижения указанного результата в известную РЛС, содержащую основную и компенсационную антенны, формирователь зондирующих сигналов, твердотельный передатчик, приемники основного и компенсационного каналов, автокомпенсатор, устройство первичной обработки, устройство вторичной обработки и сопряжения и устройство отображения, управления и контроля с соответствующими связями, дополнительно введены вторые автокомпенсатор и устройство первичной обработки, блок объединения и отождествления информации с соответствующими связями. При этом формирователь зондирующих сигналов является многочастотным и имеет на выходе последовательности зондирующих сигналов с нелинейной частотной модуляцией, твердотельный передатчик состоит из негерметичных модулей, приемники основного и компенсационного каналов являются приемниками прямого усиления, а автокомпенсаторы и приемник компенсационного канала являются четырехканальными. Кроме того, охлаждение аппаратного шкафа, в котором расположены модули твердотельного передатчика, осуществляется встроенным в аппаратный шкаф оборудованием приточно-вытяжной вентиляции без использования холодильной установки.
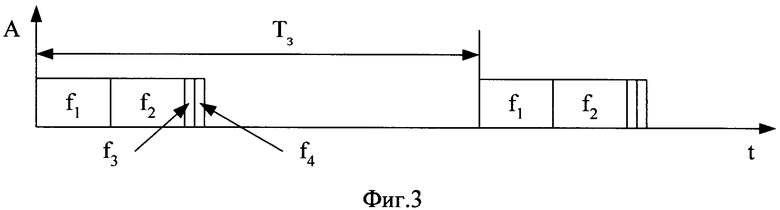
Для пояснения работы предлагаемого изобретения на Фиг.2 приведена структурная схема РЛС, где обозначено:
1 - основная антенна (ОА);
2 - компенсационная антенна (КА);
3 - формирователь зондирующих сигналов (ФЗС);
4 - твердотельный передатчик (ТП);
5 - приемник основного канала (ПРО);
6 - приемник компенсационного канала (ПРК);
7 - первый автокомпенсатор (АК);
8 - первое устройство первичной обработки (УПО);
9 - устройство вторичной обработки и сопряжения (ВОС);
10 - устройство отображения, управления и контроля (ОУК);
11 - второй автокомпенсатор (АК);
12 - второе устройство первичной обработки (УПО);
13 - блок объединения и отождествления информации (ООИ).
Как видно из структурной схемы, РЛС содержит основную антенну (ОА) 1, компенсационную антенну (КА) 2, формирователь зондирующих сигналов (ФЗС) 3, твердотельный передатчик (ТП) 4, приемник основного канала (ПРО) 5, приемник компенсационного канала (ПРК) 6, первый и второй автокомпенсаторы (АК) 7 и 11, первое и второе устройства первичной обработки (УПО) 8 и 12, устройство вторичной обработки и сопряжения (ВОС) 9, устройство отображения, управления и контроля (ОУК) 10 и блок объединения и отождествления информации (ООИ) 13, причем выход ФЗС 3 соединен с входом ТП 4, последовательно соединенного через ОА 1 и ПРО 5 по его первому и второму выходам соответственно с первыми входами АК 7 и 11 и вторыми входами УПО 8 и 12, первые входы УПО 8 и 12 соединены соответственно с выходами АК 7 и 11, второй, третий, четвертый и пятый входы которых соединены с четырьмя выходами ПРК 6, четыре входа которого соединены с четырьмя выходами КА 2, а выходы УПО 8 и 12 соединены соответственно с первым и вторым входами блока ООИ 13, первый выход которого соединен со входом устройства ОУК 10, а второй - со входом устройства ВОС 9, вход-выход, которого соединен с входом-выходом устройства ОУК 10, а выход является выходом РЛС.
При этом все выходные сигналы ФЗС 3 имеют нелинейную частотную модуляцию и различные несущие частоты и длительности импульсов, ТП 4 состоит из негерметичных модулей, несущей конструктивной единицей которых является радиатор, и расположен в отдельном шкафу вместе с охлаждающими его вентиляторами, ПРО 5 и ПРК 6 являются приемниками прямого усиления, а ПРК 6 и АК 7 и 11 являются четырехканальными. АК 7 и 11, УПО 8 и 12, устройства ВОС 9 и ОУК 10 и блок ООИ 13 объединены в шкаф рабочего места оператора (РМО), выполненного на базе современной высокопроизводительной ЭВМ со встроенными платами аналого-цифровых преобразователей и сигнальных процессоров.
РЛС работает следующим образом.
Для обеспечения высоких характеристик обнаружения в условиях флуктуации эффективной площади рассеяния (ЭПР) воздушных объектов [4], для обеспечения эффекта «замытия» интерференционных нулей диаграммы направленности антенны в вертикальной плоскости [5], а также для обеспечения эффекта «замытия» нулей в скоростной характеристике доплеровской системы селекции движущихся целей [6] зондирование пространства производится на нескольких несущих частотах (например, f1, f2, f3 и f4) последовательностями длинных (для обнаружения ВО в дальней зоне) и коротких (для обнаружения ВО в ближней зоне) импульсов, излучаемых в одном такте зондирования Tз, как показано на Фиг.3. Причем частотный разнос между парами длинных и коротких импульсов на частотах f1 и f3 либо f2 и f4 составляет ширину полосы сигнала, что позволяет обрабатывать их в одном устройстве УПО с соответствующей цифровой фильтрацией. Разнос частот f1, f2 много больше ширины полосы сигнала для обеспечения эффектов улучшения характеристик обнаружения целей и «замытия» пространственных и доплеровских нулей.
Для обеспечения высокой разрешающей способности и точности по дальности все зондирующие импульсы, сформированные в ФЗС 3, имеют нелинейную частотную модуляцию [7]. Последовательность зондирующих импульсов целиком излучается в начале такта в отличие от РЛС-прототипа, где сигнал ближней зоны излучается в конце такта. Разделение принимаемой информации с ближней и дальней зон осуществляется по несущей частоте, а не по времени. Данное решение позволяет избавиться от ложных сигналов-двойников, которые возникают в РЛС-прототипе на неоднозначных дальностях от излучения сигналов ближней зоны при больших ЭПР ВО.
Сформированные в ФЗС 3 импульсы усиливаются по мощности в широкополосном ТП 4 и излучаются ОА 1 в пространство. Отраженные от ВО эхосигналы через ОА 1 поступают в ПРО 5, где селектируются по частоте, усиливаются и преобразуются в цифровой код с помощью быстродействующего широкополосного аналого-цифрового преобразователя (АЦП). С выходов 1 и 2 ПРО 5 цифровые сигналы, соответствующие парным частотам f1 и f3, f2 и f4, поступают соответственно на первые входы АК 7 и 11 и вторые входы УПО 8 и 12.
АК 7 и 11 являются, так же как и ПРК 6, четырехканальными и осуществляют защиту РЛК от воздействия АШП, поступающих от ОА 1 через ПРО 5, используя для их компенсации, поступающие с выходов четырех излучателей КА 2 через ПРК 6 сигналы, перекрывающие азимутальный фон ОА 1 со всех направлений, что позволяет компенсировать одновременно до четырех источников помех.
УПО 8 и 12 производят обнаружение и измерение координат и радиальной скорости ВО (каждое на своей несущей частоте) в дальней и ближней зонах. При этом оптимальная фильтрация сигнала с нелинейной частотной модуляцией позволяет выделить короткий сигнал, соответствующий точности и разрешающей способности по дальности, недостижимым для прототипа. Работа РЛС на разнесенных несущих частотах с когерентным накоплением азимутального пакета позволяет обеспечить максимально возможное разрешение сигналов от ВО и пассивных помех, что обеспечивает наилучшую селекцию движущихся целей за счет доплеровского разрешения [6].
Кроме того, УПО 8 и 12 измеряют амплитуды сигналов ВО, пеленгуют источники АШП и измеряют их мощность, а также осуществляют картографирование отражений от местных предметов и гидрометеообразований, что также способствует селекции полезных сигналов.
Алгоритмы первичной обработки информации реализованы программным способом на сигнальных процессорах, установленных в ЭВМ.
Первичные координаты и радиальные скорости сигналов, обнаруженных разночастотными УПО 8 и 12, сравниваются и отождествляются в блоке ООИ 13, где отбирается сигнал с максимальной амплитудой (тем самым, повышая вероятность обнаружения), и его координаты поступают на трассовую обработку в устройство ВОС 9 и для отображения в устройство ОУК 10.
Устройство ВОС 9 осуществляет трассовую обработку информации [8], объединение информации, поступающей с блока ООИ 13, и вторичной информации, получаемой от сопрягаемого с РЛС радиозапросчика или вторичного радиолокатора, автоматизированное управление режимами работы РЛС и сопрягаемых с ней объектов (радиовысотомеров и радиозапросчика или вторичного радиолокатора), а также выдачу результатов обработки на устройство ОУК 10 и внешние комплексы средств автоматизации (КСА).
Устройство ОУК 10 обеспечивает отображение на экранах РМО первичной и вторичной информации, поступающей с блоков ООИ 13 и устройства ВОС 9, отображение органов управления, управление режимами работы РЛС, ее систем и сопрягаемых с РЛС радиовысотомеров, радиозапросчика или вторичного радиолокатора (через устройство ВОС 9), а также контроль функционирования РЛС при ее включении, непрерывный контроль при ее штатной работе и автоматизированный поиск неисправностей.
Таким образом, осуществление обзора пространства на нескольких несущих частотах импульсами с нелинейной частотной модуляцией, что потребовало применения в предлагаемой РЛС многочастотного ФЗС, введения вторых АК и УПО и нового блока ООИ, позволило повысить вероятность обнаружения, точность и разрешающую способность по дальности и обеспечить максимальное подавление отражений от местных предметов.
Применение современной высокопроизводительной элементной базы (АЦП, сигнальных процессоров, ЭВМ) и современных оптимальных алгоритмов обработки позволило упростить ПРО и ПРК, уменьшить габаритные размеры аппаратуры и более чем вдвое повысить производительность РЛС по одновременному сопровождению ВО.
Введение четвертого канала в ПРК и АК привело к повышению защищенности РЛС от АШП.
Применение ТП с негерметичными модулями позволило значительно снизить трудоемкость их изготовления и повысить надежность, что существенно снижает стоимость РЛС и увеличивает ее ресурс.
Значительному повышению надежности РЛС способствует также охлаждение ТП без использования холодильной установки.
Все вышеперечисленное расширяет функциональные возможности РЛС как при работе в системах управления воздушным движением и контроля воздушного пространства, так и при возможной модернизации старого парка метровых РЛС с доведением их характеристик до современного уровня.
Источники информации
1. Подвижная РЛС П-18. М.: Воениздат МО СССР, 1978.
2. Оружие России 2004. М.: Военный парад, 2004, РЛС 1Л13, стр.673.
3. Подвижная наземная двухкоординатная РЛС кругового обзора метрового диапазона волн. Пат. RU 2256190, МПК G01S 7/00, 13/00, з. №2003121688/09 от 14.07.2003.
4. Г.М.Вишин. Многочастотная радиолокация. М.: Воениздат, 1973 г., стр.24-35.
5. Справочник по радиолокации./ Под редакцией М. Сколника. Том 1. Основы радиолокации. М.: Сов. радио, 1976 г., стр.60-66.
6. М.И.Финкелыптейн. Основы радиолокации. М.: Сов. радио, 1983, стр.237-263.
7. Ч.Кук, М.Бернфельд. Радиолокационные сигналы. М.: Сов. радио, 1971, стр.239.
8. С.З.Кузьмин. Цифровая радиолокация. Киев, КВИЦ, 2000, стр.183-307.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВИЖНАЯ НАЗЕМНАЯ ДВУХКООРДИНАТНАЯ РЛС КРУГОВОГО ОБЗОРА МЕТРОВОГО ДИАПАЗОНА ВОЛН | 2003 |
|
RU2256190C2 |
| СПОСОБ И УСТРОЙСТВО СОПРОВОЖДЕНИЯ ЦЕЛЕЙ НА БОЛЬШИХ ДАЛЬНОСТЯХ | 2015 |
|
RU2577845C1 |
| СПОСОБ И УСТРОЙСТВО ОБЗОРА ПРОСТРАНСТВА В РЛС | 2014 |
|
RU2564130C1 |
| МОБИЛЬНАЯ ТРЕХКООРДИНАТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2014 |
|
RU2594285C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ С ЗАЩИТОЙ ОТ ШУМОВЫХ АКТИВНЫХ ПОМЕХ | 2003 |
|
RU2246736C1 |
| Радиолокационная станция кругового обзора | 2018 |
|
RU2691129C1 |
| АНТЕННАЯ СИСТЕМА И СПОСОБ ЕЕ РАБОТЫ | 2019 |
|
RU2729889C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА С ЗАЩИТОЙ ОТ АКТИВНЫХ ШУМОВЫХ ПОМЕХ | 2006 |
|
RU2324198C1 |
| УСТРОЙСТВО ПЕРВИЧНОЙ ОБРАБОТКИ СИГНАЛОВ РАДИОЛОКАЦИОННОЙ СТАНЦИИ, ИСПОЛЬЗУЮЩЕЙ ДВЕ ПОСЛЕДОВАТЕЛЬНОСТИ ЗОНДИРУЮЩИХ ИМПУЛЬСОВ | 2005 |
|
RU2305853C2 |
| ИНФОРМАЦИОННО-АНАЛИТИЧЕСКАЯ СИСТЕМА МОНИТОРИНГА ОБСТАНОВКИ, ПРЕДУПРЕЖДЕНИЯ И ЛИКВИДАЦИИ ЧРЕЗВЫЧАЙНЫХ СИТУАЦИЙ | 2014 |
|
RU2558658C1 |
Изобретение относится к радиолокации. Достигаемым техническим результатом является расширение функциональных возможностей за счет повышения ряда тактико-технических и эксплуатационных характеристик (вероятность обнаружения, точность и разрешающая способность по дальности, помехозащищенность, производительность, надежность, ресурс и др.) при снижении трудоемкости изготовления и стоимости радиолокационной станции (РЛС). Указанный результат обеспечивается использованием в РЛС основной и компенсационной антенн, многочастотного формирователя зондирующих сигналов с выходными сигналами, имеющими нелинейную частотную модуляцию и различные несущие частоты и длительности импульсов, твердотельного передатчика, состоящего из негерметичных модулей, приемников прямого усиления основного и четырех компенсационных каналов, двух четырехканальных автокомпенсаторов, двух устройств первичной обработки, устройства вторичной обработки и сопряжения, устройства отображения, управления и контроля и блока объединения и отождествления информации с соответствующими связями. 3 ил.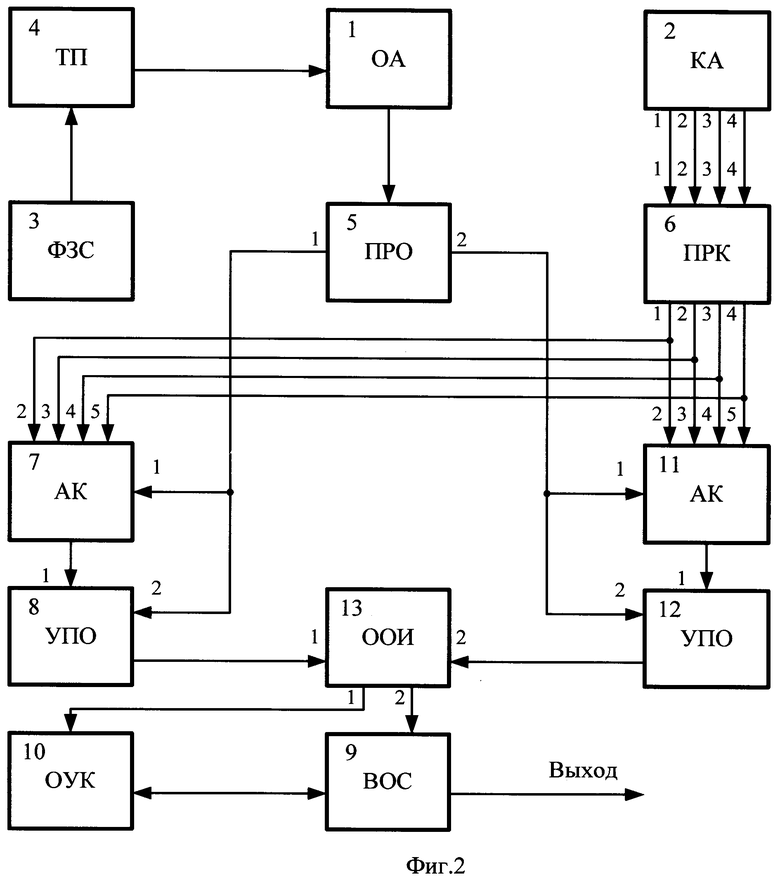
Подвижная наземная двухкоординатная радиолокационная станция (РЛС) кругового обзора метрового диапазона, содержащая основную и компенсационную антенны, формирователь зондирующих сигналов, твердотельный передатчик, приемники основного и компенсационного каналов, первый автокомпенсатор, первое устройство первичной обработки, устройство вторичной обработки и сопряжения и устройство отображения, управления и контроля, причем формирователь зондирующих сигналов соединен через твердотельный передатчик с основной антенной, выход которой соединен через приемник основного канала с первым входом первого автокомпенсатора и вторым входом первого устройства первичной обработки, первый вход которого соединен с выходом первого автокомпенсатора, второй, третий и четвертый входы которого соединены с первым, вторым и третьим выходами приемника компенсационного канала, четыре входа которого соединены с четырьмя выходами компенсационной антенны, а вход-выход устройства отображения, управления и контроля соединен со входом-выходом устройства вторичной обработки и сопряжения, выход которого является выходом РЛС, отличающаяся тем, что в нее введены вторые автокомпенсатор и устройство первичной обработки, а также блок объединения и отождествления информации с возможностью сравнения выходных сигналов первого и второго устройств первичной обработки по координатам, радиальной скорости и амплитуде, причем четвертый выход приемника компенсационного канала соединен с пятыми входами первого и второго автокомпенсаторов, вторые, третьи и четвертые входы которых соединены параллельно, второй выход приемника основного канала соединен с первым входом второго автокомпенсатора и вторым входом второго устройства первичной обработки, первый вход которого соединен с выходом второго автокомпенсатора, выходы первого и второго устройств первичной обработки соединены с соответствующими входами блока объединения и отождествления информации, первый и второй выходы которого соединены, соответственно, со входами устройства отображения, управления и контроля и устройства вторичной обработки и сопряжения, кроме того, формирователь зондирующих сигналов является многочастотным и выполнен с возможностью формирования ряда последовательностей зондирующих сигналов с различными несущими частотами и длительностями импульсов и нелинейной частотной модуляцией, твердотельный передатчик состоит из негерметичных модулей и расположен в отдельном шкафу вместе с охлаждающими его вентиляторами, приемники основного и четырех компенсационных каналов являются приемниками прямого усиления, автокомпенсаторы являются четырехканальными, а устройства первичной обработки, вторичной обработки и сопряжения, отображения, управления и контроля и блок объединения и отождествления информации выполнены на базе современной высокопроизводительной электронно-вычислительной машины (ЭВМ) со встроенными платами аналого-цифрового преобразования (АЦП) и сигнальных процессоров.
| ПОДВИЖНАЯ НАЗЕМНАЯ ДВУХКООРДИНАТНАЯ РЛС КРУГОВОГО ОБЗОРА МЕТРОВОГО ДИАПАЗОНА ВОЛН | 2003 |
|
RU2256190C2 |
| Автоматический выключатель питательных приборов | 1933 |
|
SU41524A1 |
| ЕР 1676150 А2, 05.07.2006 | |||
| WO 0235255 А2, 02.05.2002 | |||
| US 5396252 А, 07.03.1995 | |||
| Шкаф для охлаждения продуктов на горизонтальных сплошных подложках | 1983 |
|
SU1186908A1 |

