Изобретение относится к разряду радиолокационных устройств и предназначено для селекции движущихся на фоне пассивных помех (ПП) воздушных объектов (летательных аппаратов) при поимпульсной перестройке несущей частоты на основе способа, изложенного в [1-4].
В настоящее время режимы перестройки несущей частоты от импульса к импульсу представляют все больший интерес для отечественных и зарубежных разработчиков перспективных радиолокационных станций (РЛС). Это связано с тем, что поимпульсная перестройка частоты является одним из эффективных методов защиты РЛС от активных помех. Кроме того, использование сигналов с перестройкой частоты (СПЧ) также позволяет расширять информационные возможности радиолокационных станций в следующих направлениях: повышение разрешающей способности по дальности; обеспечение идентификации воздушных целей (ВЦ) и селекции ложных объектов; измерение радиальной протяженности ВЦ; определение состава групповой цели [5-22].
Известно устройство селекции движущихся целей (СДЦ), реализованное в когерентно-импульсных РЛС, в состав которого входят модулятор, передатчик, антенный переключатель, антенна, вспомогательный смеситель, стабильный гетеродин, смеситель, когерентный гетеродин, фазовый детектор, усилитель промежуточной частоты (УПЧ), генератор дополнительной частоты, фильтр, видеоусилитель и выходное устройство [23, с.348]. При этом выход модулятора соединен со входом передатчика, первый выход которого соединен с первым входом вспомогательного смесителя, а второй выход соединен с входом антенного переключателя, вход-выход которого соединен со входом-выходом антенны, а выход соединен с первым входом смесителя, второй вход которого соединен со вторым выходом стабильного гетеродина, а выход соединен со входом УПЧ, выход которого соединен со вторым входом фазового детектора, первый вход которого соединен с выходом когерентного гетеродина, а выход соединен со входом фильтра, выход которого соединен со входом видеоусилителя, выход которого соединен со входом выходного устройства. Кроме того, второй выход передатчика соединен с первым входом вспомогательного смесителя, второй вход которого соединен с первым выходом стабильного гетеродина, а выход соединен с первым входом когерентного гетеродина, второй вход которого соединен с выходом генератора дополнительной частоты.
Селекция движущихся целей в описанном устройстве [23, с.348] основана на определении доплеровской частоты, которая зависит от радиальной скорости цели и величины несущей частоты зондирующего сигнала. Однако при использовании поимпульсной перестройки несущей частоты доплеровская частота от импульса к импульсу будет изменяться по неизвестному закону, определяемому конфигурацией цели и законом перестройки частоты, что не позволит обнаружить движущиеся на фоне пассивных помех воздушные цели. Селекция движущихся целей в режиме перестройки частоты должна быть основана на новых принципах и подходах [1-4, 24], что обуславливает необходимость разработки новых устройств СДЦ, т.е. устройств с обновленной структурой.
Известно устройство СДЦ, реализованное в импульсно-доплеровской радиолокационной станции [23, с.367], включающее синхронизатор, импульсный модулятор, кварцевый генератор, стабильный задающий генератор, первый смеситель, генератор высокой частоты, антенный переключатель, антенну, фильтр, второй смеситель, первый широкополосный УПЧ, М каналов селекции по дальности, гетеродин и индикатор. При этом каждый канал селекции по дальности содержит селектор по дальности, фильтр одной боковой полосы, фильтр режекции основного луча, смеситель выделения доплеровских частот, N частотных каналов, каждый из которых содержит доплеровский фильтр, амплитудный детектор, последетекторный фильтр и пороговое устройство. При этом первый выход синхронизатора подключен к первым входам селекторов по дальности, второй выход синхронизатора соединен со входом импульсного модулятора, выход которого соединен с первым входом генератора высокой частоты, второй вход которого соединен со вторым выходом стабильного задающего генератора, первый выход которого соединен с первым входом первого смесителя, второй вход которого соединен с выходом кварцевого генератора, первый выход генератора высокой частоты соединен со входом антенного переключателя, вход-выход которого соединен со входом-выходом антенны, а выход соединен со вторым входом второго смесителя, первый вход которого подключен к выходу фильтра, вход которого соединен с выходом первого смесителя; выход второго смесителя соединен со входом первого широкополосного УПЧ, выход которого подключен ко вторым входам селекторов по дальности. В каждом канале селекции по дальности выход селектора по дальности соединен со входом фильтра одной боковой полосы, выход которого соединен со входом фильтра режекции основного луча, выход которого соединен с первым входом смесителя выделения доплеровских частот, второй вход которого соединен с выходом гетеродина, а выход подключен ко входам доплеровских фильтров. В каждом частотном канале выход доплеровского фильтра соединен со входом амплитудного детектора, выход которого соединен с со входом последетекторного фильтра, выход которого соединен со входом порогового устройства. Выходы пороговых устройств каждого частотного канала подсоединены ко входу индикатора.
Недостатком описанного устройства является невозможность селекции движущихся целей при поимпульсной перестройке несущей частоты, связанная со сложностью определения доплеровской частоты, которая от импульса к импульсу имеет неизвестное значение, определяемое геометрической конструкцией или структурой воздушной цели и законом перестройки несущей частоты [2-4]. Указанный недостаток целесообразно устранить. Для этого необходимо внести изменения в конструкцию устройства СДЦ, описанного в [23, с.367], которые позволят реализовать способ [1].
Задача изобретения заключается в разработке новой усовершенствованной конструкции устройства СДЦ, способного проводить эффективную селекцию движущихся целей в режиме перестройки частоты от импульса к импульсу.
Решение поставленной задачи достигается тем, что в состав известного, описанного выше устройства [23, с.367], включающего кварцевый генератор, импульсный модулятор, стабильный задающий генератор, первый и второй смесители, генератор высокой частоты, антенный переключатель, антенну, фильтр, первый широкополосный УПЧ, индикатор, в котором выход стабильного задающего генератора соединен с первым входом первого смесителя, выход импульсного модулятора соединен с первым входом генератора высокой частоты, выход которого соединен со входом антенного переключателя, вход-выход которого соединен со входом-выходом антенны, выход фильтра соединен с первым входом второго смесителя, выход которого соединен со входом первого широкополосного УПЧ, дополнительно включают цифровую вычислительную машину (ЦВМ), синтезатор частот, датчик углового положения антенны, усилитель высокой частоты (УВЧ), третий и четвертый смесители, второй широкополосный УПЧ, а также N частотных каналов, каждый из которых содержит фильтр n-й частоты fn, где fn=fпр2+nΔf, fпр2 - вторая промежуточная частота, 
Такое построение структурной схемы устройства СДЦ для режима перестройки частоты от импульса к импульсу придает ему способность селектировать движущиеся на фоне пассивных помех воздушные цели (объекты) в режиме поимпульсной перестройки несущей частоты.
Структурная схема предлагаемого устройства СДЦ для режима перестройки частоты от импульса к импульсу представлена на фиг.1.
Согласно данной схеме устройство СДЦ для режима перестройки частоты от импульса к импульсу содержит кварцевый генератор 1, импульсный модулятор 2, стабильный задающий генератор 3, первый смеситель 4, генератор высокой частоты 5, антенный переключатель 6, антенну 7, второй смеситель 8, фильтр 9, первый широкополосный УПЧ 10, индикатор 11, цифровую вычислительную машину 12, синтезатор частот 13, датчик углового положения антенны 14, усилитель высокой частоты 15, третий смеситель 16, четвертый смеситель 17, второй широкополосный УПЧ 18, а также содержит N частотных каналов, каждый из которых содержит фильтр n-й частоты 19, квадратурный фазовый детектор 20 и аналого-цифровой преобразователь 21 (фиг.1).
Устройство СДЦ для режима перестройки частоты от импульса к импульсу работает следующим образом.
Стабильный задающий генератор 3 формирует высокостабильные высокочастотные электромагнитные колебания на основной несущей частоте f0, которые поступают на входы первого и четвертого смесителя. В качестве стабильного задающего генератора 3 целесообразно использовать отражательный клистрон. Структура и принцип работы стабильных задающих генераторов на базе отражательных клистронов известны и описаны в [25, с.207]. Для излучения сигналов со случайным законом изменения частоты в ЦВМ 12 формируется последовательность номеров частот излучения, которая распределяется по случайному закону и используется в пачке СПЧ. При этом будет сформирован вектор F, n-й элемент которого определяет порядковый номер 
Для обеспечения режима поимпульсной перестройки несущей частоты в синтезаторе частот 13 постоянно генерируются высокочастотные колебания на всех n-х частотах fn=fпр2+nΔf. Указанные высокочастотные колебания с выхода синтезатора частот 13 последовательно поступают на второй вход первого смесителя 4 в соответствии с законом перестройки частоты, который определяется сигналами, поступающими в синтезатор частот 13 с выхода ЦВМ 12 в соответствии с сохраненным вектором F. Принцип работы синтезаторов частот описан в [26, с.29; 27, с.247]. Постоянство генерации колебаний исключает необходимость учета переходных процессов при быстром переключении частот. Кроме того, это позволяет использовать генерируемые синтезатором частот сигналы в качестве опорных для проведения квадратурного фазового детектирования отраженных сигналов в квадратурном ФД 20.
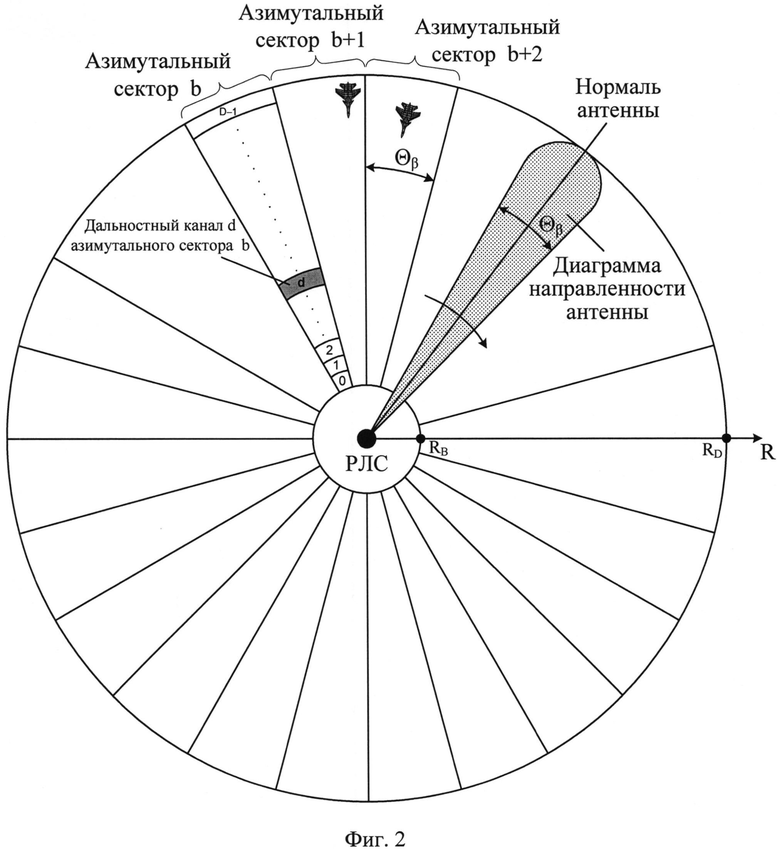
Для решения поставленной задачи предлагается разбить изображенную на фиг.2 зону обнаружения РЛС (область пространства вокруг РЛС, ограниченная по дальности ближней и дальней границами зоны обнаружения, в которой при отсутствии преднамеренных помех обеспечивается обнаружение воздушных целей с вероятностью не ниже заданной) на В=2π/Θβ азимутальных секторов, где Θβ - ширина характеристики направленности антенны в азимутальной плоскости, и D=2(RD-RB)/(cτi) дальностных каналов, где RB и RD - дальности до ближней и дальней границы зоны обнаружения, c - скорость распространения электромагнитных волн, τi - длительность импульса, дальность Rd=(RB+dcτi/2), где d - номер дальностного канала 
Для реализации способа [1] в предлагаемом устройстве СДЦ необходимо формировать и периодически излучать в пространство с помощью вращающейся по азимуту антенны 7 три пары пачек импульсных сигналов с перестройкой несущей частоты по случайному закону. Время излучения тройки пачек импульсов должно соответствовать времени изменения азимута при вращении антенны на величину Θβ. Процесс вращения антенны и излучения ею троек пар пачек СПЧ в пространство является постоянным. Этим обеспечивается полный обзор зоны обнаружения РЛС. Объединение пар пачек в тройки необходимо для обработки отраженных сигналов согласно способу [1]. В интересах повышения помехоустойчивости закон изменения несущей частоты должен быть различным для каждой пары пачек. Внутри пары пачек СПЧ указанный закон должен быть одинаковым в обеих используемых пачках.
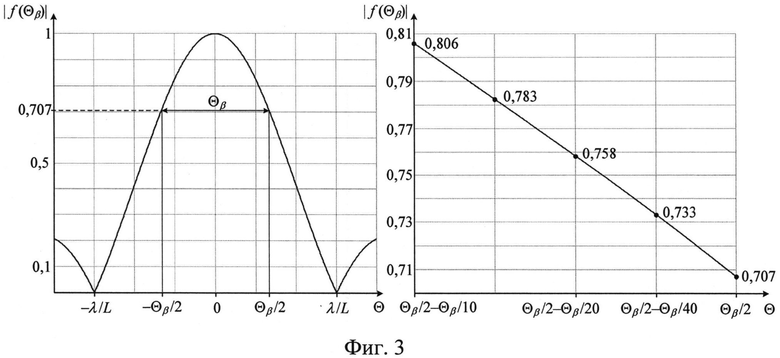
Для обзора всей зоны обнаружения (фиг.2) антенна 7 должна изменять угловое положение по азимуту в диапазоне от 0 до 360 градусов. Способ [1] предполагает отсутствие амплитудной модуляции сигналов из состава одной пары пачек СПЧ характеристикой направленности антенны при ее вращении. Для реализации способа [1] скорость вращения антенны ωА и длительность пачек СПЧ Tp необходимо выбирать из условий, позволяющих пренебречь указанной амплитудной модуляцией. Из [28, 29] известно, что характеристику направленности антенны в азимутальной плоскости f(Θ) можно описать функцией арочного синуса f(Θ)=sinc[π L sin(Θ)/λ], где Θ - угол между направлением на расположенную в дальней зоне точку наблюдения и нормалью антенны, L - линейный размер антенны, λ - длина волны. Исследование зависимости модуляции отраженных сигналов от скорости вращения антенны целесообразно проводить в пределах ширины луча по половинной мощности (ширины диаграммы направленности антенны). Очевидно, что при таком подходе максимальные изменения функции f(Θ) будут наблюдаться при значениях угла Θ, близких к ±Θβ/2. На фиг.3 изображен основной лепесток диаграммы направленности антенны и его фрагмент при значениях Θ, близких к Θβ/2. На фиг.3 видно, что при изменении переменной Θ на величину Θβ/40 (повороте антенны на угол Θβ/40) значение функции f(Θ) изменяется не более чем на 0,026, при повороте на угол Θβ/20 - не более чем на 0,05, при повороте на угол Θβ/10 - не более чем на 0,1. Для возможности пренебрежения изменениями функции ее модуляция не должна превышать единицы процентов (до 5). На этой основе выработано требование к излучению одной пары пачек СПЧ за время поворота антенны на угол Θβ/20:
Вариант последовательности зондирующих сигналов при ωA=Θβ/(40Тр) представлен на фиг.4.
С антенной 7 механически связан датчик углового положения антенны 14, предназначенный для формирования сигналов, преобразуемых далее в специальный код, несущий в себе информацию об угловом положении антенны 7 в момент излучения очередной (например, второй) пары пачек СПЧ из состава тройки. Указанный код поступает в ЦВМ.
Для формирования зондирующих импульсов с перестройкой несущей частоты сигнал стабильного задающего генератора 3 смешивается в первом смесителе 4 с одним из сигналов, формируемых синтезатором частот 13. Длительность импульсов τi, их период повторения Ti и порядок смены частот определяются цифровой вычислительной машиной 12. Принцип действия цифровых вычислительных машин известен и описан в [30, с.638; 31, с.77]. Сигналы с выхода ЦВМ управляют работой импульсного модулятора 2. Импульсный модулятор формирует видеоимпульсы длительностью τi, которые управляют работой генератора высокой частоты 5. Структура и принцип работы импульсных модуляторов известны и описаны в [30, с.312].
Полоса пропускания выходного фильтра первого смесителя 4 (на фиг.1 не показан) выбирается в диапазоне от f0+fпр2 до f0+fпр2+NΔf. В этом случае на выходе первого смесителя 4 будет присутствовать только узкополосный сигнал на одной из частот зондирования, а кратные гармоники будут подавляться. Следует отметить, что первый, второй, третий и четвертый смесители являются известными нелинейными элементами, предназначенными для преобразования частоты, основные принципы работы которых описаны в [32, с.222].
Сигнал с выхода первого смесителя 4 на частоте f0+fпр2+nΔf поступает на второй вход генератора высокой частоты 5, в качестве которого целесообразно использовать пролетный клистрон. Структура и принцип работы пролетных клистронов известны и описаны в [25, с.199]. Генератор высокой частоты 5, используя сигналы с выхода импульсного модулятора 2, формирует сверхвысокочастотные импульсные сигналы с перестройкой частоты заданной длительности τi, которые через антенный переключатель 6 передаются в антенну 7, излучающую их в пространство. Антенный переключатель 6 является известным устройством, принципы его работы описаны в [30, с.166]. Для излучения СПЧ в пространство целесообразно использовать зеркальную антенну, структура и принцип действия которой описаны в [30, с.161]. Следует отметить, что описанный процесс формирования и излучения СПЧ в пространство относится лишь к одному из азимутальных положений антенны при обзоре. Процесс формирования и излучения зондирующих сигналов по мере вращения антенны 7 по азимуту является постоянным, что обеспечивает полный обзор зоны обнаружения РЛС.
Отразившись от цели, излученные радиосигналы с измененной структурой возвращаются к антенне 7, улавливаются ею и проходят в приемный тракт, куда также «просачиваются» и зондирующие радиосигналы. Факт попадания зондирующих радиосигналов в приемник экспериментально подтвержден в [33-36]. С выхода антенны 7 принятые сигналы через антенный переключатель 6 поступают на вход УВЧ 15, который осуществляет их первичное усиление. Структура и принципы работы усилителей высокой частоты изложены в [27, с.353].
В предлагаемом устройстве осуществляется двойное преобразование частоты, необходимое для исключения влияния помех по зеркальному каналу. Преобразование частоты проводится с помощью кварцевого генератора 1, четвертого смесителя 17, фильтра 9, второго смесителя 8, третьего смесителя 16. Кварцевый генератор 1 формирует непрерывные стабильные электромагнитные колебания на первой промежуточной частоте fпр1, которые поступают на третий 16 и четвертый 17 смесители. В четвертом смесителе 17 эти колебания смешиваются с колебаниями стабильного задающего генератора 3, в результате чего на его выходе формируется комбинация высокочастотных колебаний на частотах, кратных сумме и разности основной несущей частоты f0 и первой промежуточной частоты fпр1, которые поступают на фильтр 9. Полоса пропускания фильтра 9 выбирается такой, чтобы на его выходе проходил только узкополосный радиосигнал на разностной частоте, равной f0-fпр1.
После первичного усиления отраженные радиосигналы с выхода УВЧ 15 поступают на второй вход второго смесителя 8, на первый вход которого поступает сигнал с выхода фильтра 9. Полоса пропускания выходного фильтра второго смесителя 8 (на фиг.1 не показан) выбирается в диапазоне от fпр1+fпр2 до fпр1+fпр2+NΔf.
Основное усиление принятых сигналов производится в двух широкополосных усилителях промежуточной частоты 10 и 18. Принцип действия и структура УПЧ известны и описаны в [27, с.376]. Сигналы с выхода второго смесителя 8 поступают в первый широкополосный УПЧ 10. Полоса пропускания первого широкополосного УПЧ 10 выбирается в диапазоне от fпр1+fпр2 до fпр1+fпр2+NΔf, а полоса пропускания второго широкополосного УПЧ 18 - в диапазоне от fпр2 до fпр2+NΔf. Усиленные отраженные сигналы на частоте fпр1+fпр2+nΔf с выхода первого широкополосного УПЧ 10 поступают на первый вход третьего смесителя 16 (на втором входе которого присутствуют сигналы на первой промежуточной частоте fпр1), который осуществляет перенос спектра сигналов на вторую промежуточную частоту fпр2. Для этого полоса пропускания выходного фильтра третьего смесителя 16 (на фиг.1 не показан) выбирается в диапазоне от fпр2 до fпр2+NΔf. Отраженные сигналы на частоте fпр2+nΔf с выхода третьего смесителя 16 поступают на вход второго широкополосного УПЧ 18, в котором осуществляется их усиление.
Выход второго широкополосного УПЧ 18 соединяют одновременно со входом каждого фильтра n-й частоты 19 соответствующего n-го частотного канала, с помощью которых производится распределение сигналов по частотным каналам. Число каналов равно числу частот N. Полоса пропускания фильтра n-й частоты 19 выбирается в диапазоне fпр2+nΔf±Δf/2. В n-м частотном канале фильтр 19 настроен на свою n-ю частоту. То есть фильтр 19 пропускает в свой n-й канал сигналы только соответствующей номеру канала частоты. При этом для правильной расфильтровки сигналов необходимо выполнение условия τi>1/(2Δf). Предполагается, что фильтры 19 и фильтр 9 представляют собой полосовые фильтры, структура и принцип действия которых описаны в [37, с.202].
В интересах проведения дальнейшей обработки принятые сигналы с выходов фильтра n-й частоты 19 поступают на вход квадратурного фазового детектора 20 соответствующего n-го канала, где они разделяются на квадратурные составляющие (синусную Im и косинусную Re). Принципы квадратурной обработки принятых сигналов с помощью квадратурного фазового детектора 20 известны и описаны в [38-40]. Для проведения квадратурной обработки на квадратурный фазовый детектор 20 каждого n-го частотного канала подаются опорные колебания на частоте fпр2+nΔf, постоянно генерируемые синтезатором частот 13 для формирования зондирующих сигналов (ЗС).
В каждом частотном канале полученные с помощью квадратурного ФД 20 квадратурные составляющие принятых сигналов Re и Im поступают в АЦП 21, где они преобразовываются в цифровую форму. Аналого-цифровой преобразователь 21 является известным устройством, основные принципы работы которого описаны в [41, с.291; 42, с.11]. Частота дискретизации АЦП 21 выбирается по теореме Котельникова, согласно которой для однозначного восприятия функции дискретными значениями частота дискретизации Fд должна выбираться как минимум в два раза больше частоты дискретизируемой функции (аналогового сигнала на выходе УПЧ). Например, максимальная частота входного сигнала АЦП 21 при fпр2=30 МГц и ΔF=150 МГц составляет 180 МГц. Следовательно, при указанных параметрах сигналов частоту дискретизации Fд следует выбирать не менее 360 МГц (Fд≥360 МГц).
На выходе АЦП 21 n-х частотных каналов формируются отсчеты соответствующих квадратурных составляющих (синусной и косинусной) отраженного сигнала на частоте fпр2+nΔf, которые в комплексном виде (в виде комплексного числа) поступают на соответствующие n-е входы ЦВМ 12, где проводится их многоканальная цифровая обработка согласно способу [1]. Она включает в себя: согласованную фильтрацию принятых сигналов, формирование частотных характеристик (ЧХ) в каждом дальностном канале, компенсацию радиального движения пассивной помехи (перефазирование ЧХ), формирование разностных частотных характеристик, компенсацию радиального движения ВЦ (перефазирование разностных ЧХ), построение дальностных портретов ВЦ, получение трех оценок радиальной скорости ВЦ и сравнение их между собой, на основании чего принимается решение о наличии ВЦ в обрабатываемом дальностном канале на выбранном азимуте. Следует отметить, что описанный процесс приема и обработки отраженных сигналов относится лишь к одному из азимутальных положений антенны при обзоре. Данный процесс по мере вращения антенны 7 по азимуту является непрерывным, что обеспечивает полный обзор зоны обнаружения радиолокационной станции.
Для проведения согласованной фильтрации отраженных сигналов n-й частоты в оперативном запоминающем устройстве ЦВМ 12 производится «запоминание» просочившегося в приемный тракт зондирующего сигнала n-й частоты. Факт попадания зондирующих сигналов в приемный тракт экспериментально подтвержден в [33-36]. Запись информации о зондирующем импульсе n-й частоты начинается в момент подачи сигнала на его излучение, который поступает с выхода ЦВМ 12 на вход синтезатора частот 13. «Просочившийся» в приемный тракт из-за неидеальности антенного переключателя 6 зондирующий сигнал оцифровывается, преобразуется в комплексную форму и запоминается в комплексно-сопряженном виде. Это необходимо для проведения цифровой согласованной фильтрации по методике, изложенной в [34-36]. Отклик цифрового согласованного фильтра вычисляется в виде свертки (суммы произведений со сдвигом) дискретных значений принятых сигналов и комплексно-сопряженного ЗС в опорные моменты времени td каждого дальностного канала, на интервале, равном длительности пачки Tp.
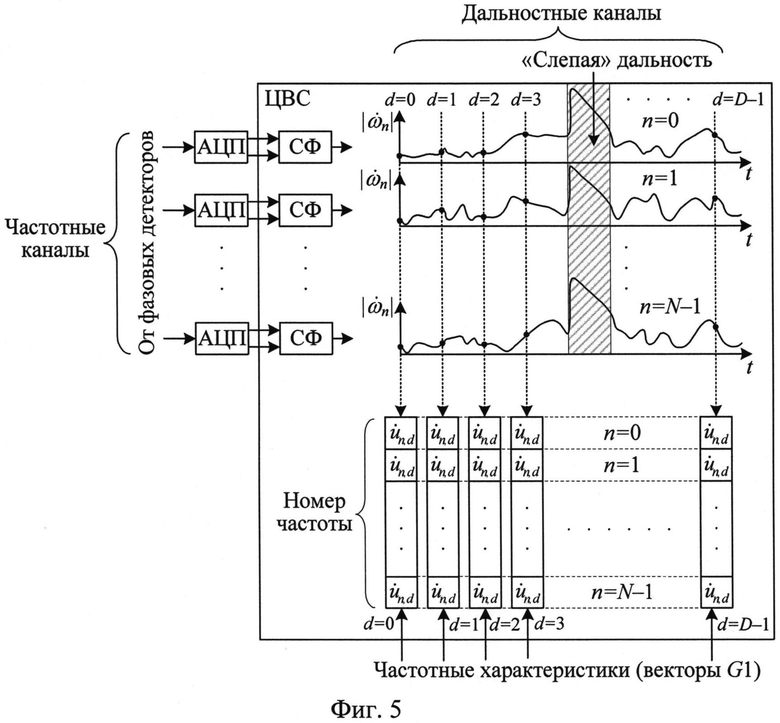
Затем в оперативном запоминающем устройстве ЦВМ 12 осуществляется селекция по дальности путем разделения откликов согласованных фильтров на дальностные каналы протяженностью сτi/2, где с - скорость распространения электромагнитных волн. В каждом d-м дальностном канале обрабатываемого азимутального канала формируется вектор G1d (ЧХ) из N элементов, при этом в n-й элемент этого вектора записывается комплексное значение отклика согласованного приемника на n-й частоте в точке опорной дальности d-го канала дальности td (или n-й член ЧХ). В результате в оперативном запоминающем устройстве ЦВМ 12 будет сформировано D частотных характеристик. Данная операция поясняется фиг.5. Она аналогична операции создания двумерной матрицы из D*N элементов.
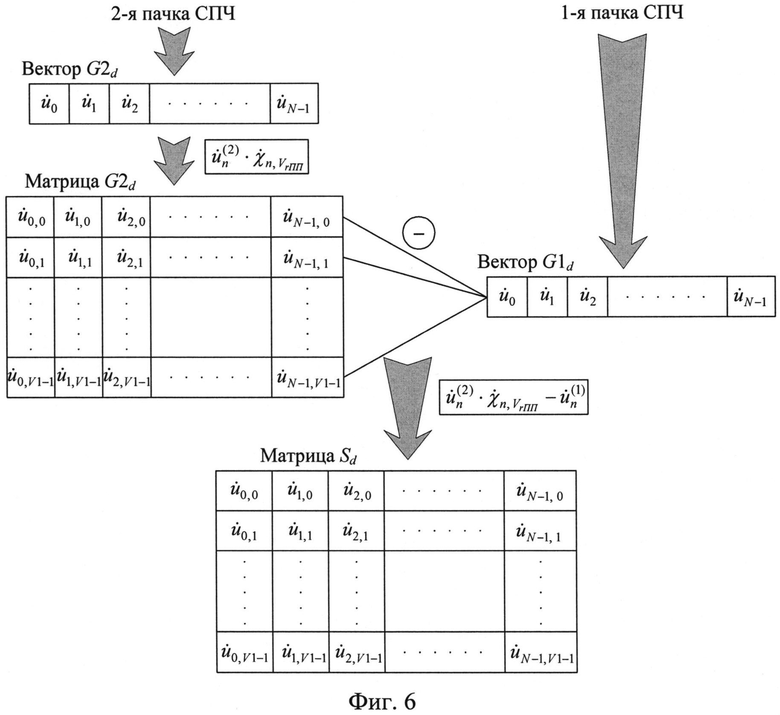
Частотные характеристики, полученные в каждом d-м канале дальности в результате обработки первой пачки СПЧ (векторы G1d), сохраняются в оперативном запоминающем устройстве ЦВМ 12 для их последующего вычитания из перефазированных частотных характеристик, полученных в результате обработки второй пачки СПЧ. Для осуществления перефазирования каждый элемент векторов G2d умножается на комплексный фазовый множитель 
В результате в каждом дальностном канале обрабатываемого азимутального канала будет сформирована двумерная матрица G2d данных из V1=(2VrПП max/ΔVrПП+1) строк и N столбцов. Далее производится вычитание n-х элементов вектора G1d из строк матрицы G2d, в результате которого в каждом дальностном канале будет сформирована двумерная матрица Sd данных, состоящая из V1 строк и N столбцов. Перечисленные операции схематично поясняются фиг.6.
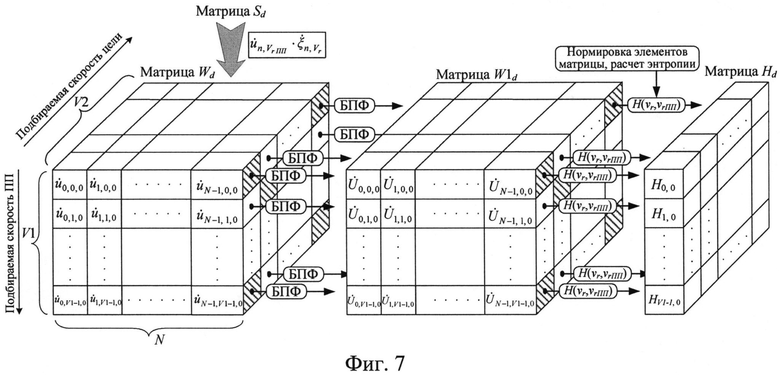
Следующим этапом цифровой обработки принятых сигналов в ЦВМ 12 является перефазирование разностных ЧХ в каждом дальностном канале обрабатываемого азимутального канала путем умножения каждого n-го элемента разностной ЧХ на фазовый множитель 

Затем в каждом дальностном канале обрабатываемого азимутального канала путем проведения обратного быстрого преобразования Фурье с комплексными векторами данных каждой строки трехмерной матрицы Wd формируется трехмерная матрица W1d, равная по размерам матрице Wd. После этого в матрице W1d находится максимальное значение модуля комплексного сигнала, и комплексные величины всех элементов этой матрицы делятся на найденное значение (нормирование элементов матрицы W1d). После этого рассчитывается величина энтропии данных Н для каждой строки матрицы W1d. В результате в каждом дальностном канале формируется двумерная матрица Hd из V1*V2 элементов. Указанные операции поясняются фиг.7. Первые индексы элементов матриц, показанных на фиг.7, обозначают номер частоты, вторые - подбираемое значение радиальной скорости ПП, третьи - подбираемое значение радиальной скорости цели.
На конечном этапе в каждом дальностном канале обрабатываемого азимутального канала находится номер столбцов 




Полученные в каждом дальностном канале обрабатываемого азимутального канала оценки радиальной скорости 
На этом обработка первой пары пачек СПЧ прекращается. Для исключения ложной тревоги и принятия правильного решения о наличии цели в обрабатываемом дальностном канале необходимо излучение и обработка как минимум еще двух пар пачек СПЧ с другими законами изменения частоты. Для этого описанный выше процесс излучения и обработки сигналов повторяется дважды. Обработка каждой пары пачек СПЧ по описанному выше алгоритму позволяет получить еще две оценки радиальной скорости цели 


где ΔV - порог, определяемый точностью оценки (измерения) скорости, принимается решение о наличии в d-м дальностном канале цели, движущейся с радиальной скоростью 
Решение о принадлежности цели b-му азимутальному каналу вырабатывается ЦВМ 12 на основании сигнала, формируемого датчиком углового положения антенны 14 и несущего в себе информацию о положении нормали антенны 7 в момент излучения второй пары обрабатываемых пачек СПЧ из состава тройки.
Результаты обработки с первого выхода ЦВМ 12 поступают на вход индикатора 11. В качестве индикатора 11 целесообразно использовать индикатор кругового обзора, являющийся известным устройством визуального отображения информации, основные принципы устройства и работы которого описаны в [30, с.397; 42, с.264]. Результаты обработки сигналов отображаются в виде информации об азимуте, дальности и скорости цели на индикаторе 11.
Предложенное новое построение схемы устройства селекции движущихся целей обладает преимуществом по сравнению с устройством-прототипом, что выражается в придании помехоустойчивому режиму зондирования с перестройкой несущей частоты способности селектировать движущиеся на фоне пассивных помех ВЦ и измерять их радиальные скорости. Новая структура устройства позволяет реализовать многоканальную обработку отраженных ВЦ сигналов, которая обеспечивает эффективную селекцию движущихся целей в локаторе обзора воздушного пространства при перестройке несущей частоты радиолокационной станции от импульса к импульсу.
Предложенное устройство рекомендуется к использованию в перспективных РЛС кругового или секторного обзора службы организации воздушного движения, а также в посадочных РЛС аэродромов.
Источники информации
1. Патент РФ №2419107. Способ селекции движущихся целей в режиме перестройки частоты от импульса к импульсу. Митрофанов Д.Г., Майоров Д.А. и др. G01S 13/52. Опубл. 20.05.2011.
2. Майоров Д.А., Савостьянов В.Ю., Митрофанов Д.Г. Применение зондирующих сигналов с перестройкой частоты для оценивания радиальной скорости воздушных объектов методом минимума энтропии // Электромагнитные волны и электронные системы. 2007. №9. С.54-60.
3. Майоров Д.А., Савостьянов В.Ю., Митрофанов Д.Г. Измерение радиальной скорости воздушных объектов в режиме перестройки частоты // Измерительная техника. 2008. №2. С.43-47.
4. Савостьянов В.Ю., Митрофанов Д.Г., Мельник Н.Г., Майоров Д.А. Оценка радиальной скорости объекта при перестройке несущей частоты // Радиопромышленность. 2009. №1. С.57-71.
5. Радиоэлектронные системы. Справочник. Основы построения и теория / Под ред. Я.Д. Ширмана. М.: Радиотехника, 2007. 510 с.
6. Патент РФ №2152626. РЛС с инверсным синтезированием апертуры и многочастотным зондирующим сигналом. Митрофанов Д.Г., Силаев Н.В. G01S 13/90. Опубл. 10.07.2000.
7. Митрофанов Д.Г. Метод построения радиолокационных изображений аэродинамических летательных аппаратов // Полет, 2006. №11. С.52-60.
8. Сафонов А.В., Митрофанов Д.Г. Применение нейросетевой технологии для распознавания целей по радиолокационным изображениям // Нейрокомпьютеры: разработка и применение, 2006. №3. С.60-68.
9. Митрофанов Д.Г. Построение двумерного изображения объекта с использованием многочастотного зондирующего сигнала // Измерительная техника, 2001. №2. С.57-62.
10. Митрофанов Д.Г., Силаев Н.В. Способ построения изображений воздушных целей с использованием многочастотного сигнала // Оборонная техника, 2000. №3-4. С.32-36.
11. Митрофанов Д.Г., Силаев Н.В. Использование многочастотного узкополосного зондирующего сигнала для построения двумерного радиолокационного изображения объекта. Киев: Радиоэлектроника. Известия вузов, 2000. Т.43. №12. С.39-46.
12. Митрофанов Д.Г. Комплексный адаптивный метод построения радиолокационных изображений в системах управления двойного назначения // Теория и системы управления. Известия РАН, 2006. №1. С.101-118.
13. Патент РФ №2099743. МПК G01S 13/89. Способ построения двумерного радиолокационного изображения прямолинейно летящей цели при многочастотном узкополосном зондировании. Митрофанов Д.Г. Опубл. 20.12.97.
14. Митрофанов Д.Г. Модернизированный адаптивный метод формирования радиолокационных изображений воздушных целей для сигналов со ступенчатой перестройкой несущей частоты. Известия Российской академии ракетных и артиллерийских наук. 2012. №71. С.102-108.
15. Патент РФ №2439611. Митрофанов Д.Г. Радиолокационная станция с поимпульсной перестройкой несущей частоты, нейросетевым распознаванием объектов и инверсным синтезированием апертуры антенны. Опубл. 09.03.2011.
16. Патент РФ №2412451. Радиолокационная станция с перестройкой частоты, инверсным синтезированием апертуры и двухуровневым нейросетевым распознаванием объектов по совокупности признаков. Перехожев В.А., Новиков А.В., Митрофанов Д.Г., Васильченко О.В., Гаврилов А.Д., Сафонов А.В., Волошко П.В., Фахрутдинов Т.М. Опубл. 21.07.2009.
17. Патент РФ №2280263. Способ селекции ложных воздушных целей. Прохоркин А.Г., Митрофанов Д.Г., Оверченко А.Г., Маркевич А.А., Романенко А.В., Абраменков А.В. Опубл. 20.07.2006.
18. Патент РФ №2389039. Способ измерения радиальной скорости воздушной цели в режиме перестройки несущей частоты от импульса к импульсу по случайному закону при пониженном отношении сигнал-шум. Митрофанов Д.Г., Силаев Н.В., Майоров Д.А., Тулузаков В.Г., Немцов А.В. Опубл. 10.12.2008.
19. Патент на полезную модель №91185. Устройство двухуровневого нейросетевого распознавания воздушных объектов по совокупности признаков. Перехожев В.А., Митрофанов Д.Г., Сафонов А.В. Опубл. 2.07.2009.
20. Патент на полезную модель №77980. Радиолокационная станция с инверсным синтезированием апертуры и двухуровневым нейросетевым распознаванием целей. Сафонов А.В., Митрофанов Д.Г., Гаврилов А.Д., Бортовик В.В., Прохоркин А.Г., Майоров Д.А., Перехожев В.А., Дерябин Ю.А. Опубл. 01.07.2008.
21. Митрофанов Д.Г., Сафонов А.В., Прохоркин А.Г. Моделирование задачи распознавания целей по их радиолокационным изображениям нейросетевым способом // Радиотехника. 2007. №2. С.3-9.
22. Патент РФ №2234110. Способ построения двумерного радиолокационного изображения воздушной цели. Митрофанов Д.Г., Бортовик В.В., Сафонов А.В., Николаев А.В., Зотов М.Ю., Митрофанов А.Д., Прохоркин А.Г. Опубл. 10.08.2004.
23. Григорин-Рябов В.В. Радиолокационные устройства. М.: Сов. радио, 1970. 680 с. (с.348 - аналог, с.367 - прототип).
24. Григорян Д.С., Майоров Д.А., Митрофанов Д.Г. Способ селекции движущихся целей при использовании сигналов с перестройкой частоты // Вопросы радиоэлектроники. 2009. Т.2. №1. С.112-119.
25. Окунь Е.Л. Радиопередающие устройства. М.: Сов. радио, 1973. 400 с.
26. Белов Л.А. Синтезаторы частот и сигналов. М.: Сайнс-Пресс, 2002. 80 с.
27. Радиопередающие устройства: учебник для вузов / Под ред. Шахгильдяна В.В. М.: Радио и связь, 2003. 560 с.
28. Антенны УКВ / Под ред Г.З. Айзенберга. М.: Связь, 1977. 384 с.
29. Фрадин А.З. Антенно-фидерные устройства. М.: Связь, 1977. 440 с.
30. Справочник по основам радиолокационной техники / Под ред. В.В. Дружинина. М.: Воениздат, 1967. 768 с.
31. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. М.: Радио и связь, 1984. 152 с.
32. Радиоприемные устройства / Под ред. Сифорова В.И. М.: Сов. радио, 1974. 560 с.
33. Крючков И.В., Нефедов С.И., Ротов М.К. Возможности регистрации и обработки длительных когерентных сигналов на базе высокоскоростных АЦП и сигнальных процессоров // Сб. докладов Всероссийской научно-технической конференции «Информационно-телекоммуникационные технологии». М.: МЭИ, 2004.
34. Митрофанов Д.Г., Прохоркин А.Г., Нефедов С.И. Измерение поперечных размеров летательных аппаратов по частотной протяженности доплеровского портрета // Радиотехника, 2008. №1. С.84-90.
35. Митрофанов Д.Г. Экспериментальные исследования параметров траекторных нестабильностей полета воздушных объектов. Воронеж: НПФ «САКВОЕЕ» ООО. Сборник докладов XV международной конференции «RLNC-2009», 2009. С.1536-1547.
36. Митрофанов Д.Г. Исследование отражательных характеристик воздушных объектов в условиях проявления траекторных нестабильностей // Известия института инженерной физики, 2009. №3. С.37-46.
37. Каганов В.И. Радиотехнические цепи и сигналы. Компьютеризированный курс. М.: Форум Инфра-М, 2005. 432 с.
38. Патент на полезную модель №9556. МПК H03C 3/38. Квадратурный фазовый детектор. Афанасьев В.В., Дедов А.И. Опубл. 16.03.1999. http://bankpatentov.ru/node/394433.
39. Шило В.Л. Популярные цифровые микросхемы. М.: Радио и связь, 1987.
40. А.с. СССР №470907. Импульсный фазовый детектор. Опубл. 15.05.75.
41. Охрименко А.Е. Основы радиолокации и радиоэлектронная борьба. Ч.1. Основы радиолокации. М.: Воениздат, 1983. 587 с.
42. Плекин В.Я. Цифровые устройства селекции движущихся целей. М.: Сайнс-Пресс, 2003. 80 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ В РЕЖИМЕ ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКИ НЕСУЩЕЙ ЧАСТОТЫ | 2009 |
|
RU2419107C1 |
| Способ формирования дальностного портрета повышенной информативности на основе использования сигналов с перестройкой частоты от импульса к импульсу | 2023 |
|
RU2808449C1 |
| Способ формирования дальностного портрета, получаемого на основе использования сигналов с перестройкой частоты, от импульса к импульсу, за счет построения характеристики изменения радиальной скорости воздушного объекта | 2023 |
|
RU2815730C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ВОЗДУШНОЙ ЦЕЛИ В РЕЖИМЕ ПЕРЕСТРОЙКИ НЕСУЩЕЙ ЧАСТОТЫ ОТ ИМПУЛЬСА К ИМПУЛЬСУ ПО СЛУЧАЙНОМУ ЗАКОНУ ПРИ ПОНИЖЕННОМ ОТНОШЕНИИ СИГНАЛ-ШУМ | 2008 |
|
RU2389039C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИМПУЛЬСНОЙ ХАРАКТЕРИСТИКИ ВОЗДУШНОГО ОБЪЕКТА С ПОВЫШЕННОЙ ИНФОРМАТИВНОСТЬЮ НА УЧАСТКАХ ЕГО ПРОСТРАНСТВЕННО-УГЛОВОГО ЗАМИРАНИЯ | 2015 |
|
RU2603694C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ВОЗДУШНОЙ ЦЕЛИ В РЕЖИМЕ ПЕРЕСТРОЙКИ ЧАСТОТЫ ОТ ИМПУЛЬСА К ИМПУЛЬСУ | 2007 |
|
RU2326402C1 |
| СПОСОБ ВНЕШНЕГО РАДИОЛОКАЦИОННОГО ВЫЯВЛЕНИЯ ФАКТА НАЛИЧИЯ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ ПОЛЕТА У ВОЗДУШНОГО ОБЪЕКТА ПО СТРУКТУРЕ ЕГО ИМПУЛЬСНОЙ ХАРАКТЕРИСТИКИ | 2014 |
|
RU2562060C1 |
| Радиолокационная станция | 2021 |
|
RU2755518C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ВОЗДУШНОГО ОБЪЕКТА В РЕЖИМЕ ХАОТИЧНОЙ ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКИ НЕСУЩЕЙ ЧАСТОТЫ ПРИ ОГРАНИЧЕННОМ КОЛИЧЕСТВЕ ИСПОЛЬЗУЕМЫХ ЧАСТОТ | 2010 |
|
RU2427003C2 |
| МНОГОЧАСТОТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И ДВУХУРОВНЕВЫМ РАСПОЗНАВАНИЕМ ЦЕЛЕЙ | 2007 |
|
RU2358288C1 |

Изобретение относится к области радиолокации и предназначено для селекции движущихся целей на фоне пассивных помех. Достигаемый технический результат - повышение эффективности селекции движущихся целей в режиме перестройки несущей частоты зондирования от импульса к импульсу. Указанный результат достигается за счет того, что устройство селекции содержит кварцевый генератор, импульсный модулятор, стабильный задающий генератор, первый смеситель, генератор высокой частоты, антенный переключатель, антенну, второй смеситель, фильтр, первый широкополосный усилитель промежуточной частоты, индикатор, а также содержит цифровую вычислительную машину, синтезатор частот, датчик углового положения антенны, усилитель высокой частоты, третий и четвертый смесители, второй широкополосный усилитель промежуточной частоты, а также N частотных каналов, каждый из которых содержит фильтр n-й частоты, квадратурные фазовые детекторы и аналого-цифровой преобразователь. При этом все перечисленные средства определенным образом соединены между собой. 7 ил.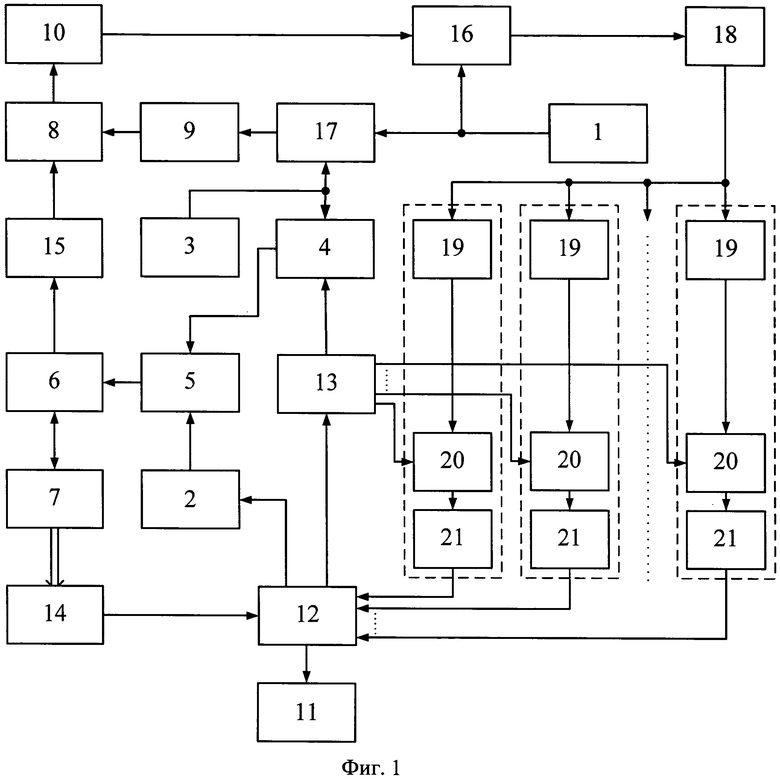
Устройство селекции движущихся целей для режима перестройки частоты от импульса к импульсу, включающее кварцевый генератор, импульсный модулятор, стабильный задающий генератор, первый смеситель, генератор высокой частоты, антенный переключатель, антенну, второй смеситель, фильтр, первый широкополосный усилитель промежуточной частоты, индикатор, в котором выход стабильного задающего генератора соединен с первым входом первого смесителя, выход импульсного модулятора соединен с первым входом генератора высокой частоты, выход которого соединен со входом антенного переключателя, вход-выход которого соединен со входом-выходом антенны, выход фильтра соединен с первым входом второго смесителя, выход которого соединен со входом первого широкополосного усилителя промежуточной частоты,
отличающееся тем, что в состав устройства дополнительно включают цифровую вычислительную машину, синтезатор частот, датчик углового положения антенны, усилитель высокой частоты, третий и четвертый смесители, второй широкополосный усилитель промежуточной частоты, а также N частотных каналов, где N - количество используемых в устройстве частот перестройки, каждый из которых содержит фильтр n-й частоты fn, квадратурный фазовый детектор и аналого-цифровой преобразователь, причем первый выход цифровой вычислительной машины соединяют со входом индикатора, второй выход цифровой вычислительной машины соединяют со входом импульсного модулятора, третий выход цифровой вычислительной машины соединяют со входом синтезатора частот, каждый n-й выход которого соединяют с первым входом квадратурного фазового детектора соответствующего n-го частотного канала, a (N+1)-й выход соединяют со вторым входом первого смесителя, выход которого соединяют со вторым входом генератора высокой частоты, выход антенного переключателя соединяют со входом усилителя высокой частоты, выход которого соединяют со вторым входом второго смесителя, вход фильтра связывают с выходом четвертого смесителя, первый вход которого соединяют с выходом стабильного задающего генератора, выход кварцевого генератора соединяют со вторым входом четвертого смесителя и со вторым входом третьего смесителя, первый вход которого соединяют с выходом первого широкополосного усилителя промежуточной частоты, а выход соединяют со входом второго широкополосного усилителя промежуточной частоты, выход которого соединяют одновременно со входом каждого фильтра n-й частоты соответствующего n-го частотного канала, в каждом n-м частотном канале выход фильтра n-й частоты соединяют со вторым входом квадратурного фазового детектора, первый и второй выходы которого подключают к соответствующим первому и второму входам аналого-цифрового преобразователя, выход аналого-цифрового преобразователя каждого n-го частотного канала подключают к соответствующему n-му входу цифровой вычислительной машины, (N-1)-й вход которой соединяют с выходом датчика углового положения антенны, механический вход которого механически связывают с механическим выходом антенны.
| ГРИГОРИН-РЯБОВ В.В | |||
| Радиолокационные устройства | |||
| Москва, Советское радио, 1970, с | |||
| Способ отковки в штампах заготовок для спиральных сверл | 1921 |
|
SU367A1 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ В РЕЖИМЕ ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКИ НЕСУЩЕЙ ЧАСТОТЫ | 2009 |
|
RU2419107C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА С ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ ОТ ИМПУЛЬСА К ИМПУЛЬСУ В РЕЖИМЕ СДЦ | 2002 |
|
RU2234719C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ПОДВИЖНЫХ ЦЕЛЕЙ С ФАЗОВОЙ СЕЛЕКЦИЕЙ ПО ДАЛЬНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2360265C1 |
| US 20110309972 A1, 22.12.2011 | |||
| US 7903024 B2, 08.03.2011 | |||
| ВЫСОКОТЕМПЕРАТУРНЫЙ СВЕРХПРОВОДЯЩИЙ ЭЛЕКТРОМАГНИТНЫЙ ИНДУКЦИОННЫЙ ДВИГАТЕЛЬ С РАДИАЛЬНЫМ ЗАЗОРОМ | 2016 |
|
RU2631673C1 |

