Изобретение относится к радиолокации и может быть использовано в импульсных радиолокационных станциях (РЛС) сопровождения с активной фазированной антенной решеткой (АФАР).
В настоящее время широкое распространение получили РЛС с активными фазированными антенными решетками, обладающие большими возможностями по обнаружению и сопровождению целей. Как правило, РЛС с АФАР имеют твердотельное передающее устройство (ПДУ), выполненное на базе полупроводниковых транзисторов. В таких ПДУ требуемая мощность зондирующего сигнала обеспечивается за счет суммирования мощностей отдельных транзисторов. Для более полного использования транзисторов по средней мощности наиболее эффективным является режим излучения, при котором длительность зондирующего импульса была бы максимальной и ограничивалась бы предельным тепловым режимом транзистора. Вместе с тем, для получения максимальной средней мощности РЛС период повторения импульсов должен быть минимальным (режим малой скважности, при котором отношение периода повторения импульсов к длительности импульса не превышает величину 5-10 раз). Такой период повторения определяет оптимальную, с точки зрения ПДУ, величину инструментальной дальности (Динстр.опт).
При необходимости сопровождения целей на дальностях больших Динстр.опт и сохранении однозначности измерения дальности цели, в таких РЛС приходится увеличивать период повторения импульсов. При этом происходит уменьшение средней мощности РЛС, т.к. обеспечить соответствующее увеличение длительности импульса и, соответственно, сохранение скважности не представляется возможным вследствие указанных выше тепловых ограничений транзистора. В таких условиях для увеличения дальности сопровождения целей РЛС вынуждена увеличивать время облучения, чтобы скомпенсировать потери мощности, вызванные увеличением периода повторения импульсов, что, в свою очередь, приводит к снижению производительности РЛС.
Если же при облучении цели, дальность которой больше Динстр.опт, сохранить оптимальный (с точки зрения ПДУ) период повторения импульсов, то временные затраты на сопровождение будут минимальны, однако при этом возникнет проблема неоднозначного измерения дальности цели.
Существуют способы устранения неоднозначности измерения дальности [1, 2], которые заключаются в последовательном облучении цели несколькими пачками импульсов с различной частотой повторения и последующим «распутыванием» неоднозначности путем корреляции доплеровских спектров отраженных радиоимпульсов в пачках с различной частотой повторения. Однако использование нескольких пачек импульсов приводит к увеличению времени облучения целей и, как следствие, к уменьшению количества целей, сопровождаемых РЛС за один обзор.
Для устранения указанных противоречий в патентуемом способе предлагается использовать многочастотный способ зондирования, при котором излучение сигнала и прием отраженного радиоимпульса происходят на рабочей частоте, изменяющейся, как внутри периода повторения импульсов, так и от такта к такту по определенному закону.
Известны РЛС с АФАР, использующие многочастотный зондирующий сигнал [3, 4, 5]. Общим недостатком этих аналогов является увеличение временных затрат на обнаружение целей, находящихся на дальностях, больших инструментальной, что приводит к снижению производительности РЛС.
Наиболее близким аналогом (прототипом) к предлагаемому решению по техническому исполнению является «Подвижная наземная двухкоординатная РЛС кругового обзора метрового диапазона» [6]. Эта РЛС содержит основную и компенсационную антенны, формирователь зондирующих сигналов, передатчик, приемники основного и компенсационного каналов, два автокомпенсатора, два устройства первичной обработки, устройство объединения и отождествления информации и устройство вторичной обработки. Зондирование пространства производится на двух несущих частотах, излучаемых в одном такте. Приемники основного и компенсационного каналов являются приемниками прямого усиления, где эхо-сигналы селектируют по частоте, усиливают и преобразуют в цифровой код с помощью быстродействующего аналого-цифрового преобразователя (АЦП).
Устройства первичной обработки производят обнаружение, измерение координат и радиальной скорости воздушных объектов (каждое в полосе своей несущей частоты), а также осуществляют измерение амплитуды сигналов, когерентное накопление, подавление сигналов, принятых боковыми лепестками диаграммы направленности основной антенны. При этом накопление и обнаружение эхо-сигнала в устройствах первичной обработки происходит на каждой рабочей частоте независимо. После этого в устройстве объединения и отождествления информации отбираются координаты обнаруженного объекта на той частоте работы РЛС, на которой амплитуда обнаруженного сигнала больше, а затем измеренные координаты и радиальные скорости объекта подаются на последующую обработку.
Недостатком прототипа является то обстоятельство, что для обнаружения и сопровождения целей на дальностях, превышающих инструментальную в оптимальном режиме работы передающего устройства, в РЛС требуется увеличивать период повторения импульсов, что приводит к уменьшению средней мощности излучаемого сигнала и, как следствие, к увеличению времени облучения, необходимого для обнаружения и сопровождения воздушных объектов. В то же время сохранение периода повторения импульсов с используемым в прототипе законом изменения частоты излучаемого сигнала приведет к неоднозначному измерению расстояния до цели, а применение известных способов снятия неоднозначности измерений дальности потребует дополнительных временных затрат, что приведет к снижению производительности РЛС.
Техническим результатом предлагаемого изобретения является уменьшение временных затрат на обнаружение целей и, как следствие, увеличение производительности РЛС сопровождения при сохранении однозначности измерения дальности.
Указанный технический результат достигается за счет использования многочастотного способа работы, при котором частота зондирующего сигнала изменяется от такта к такту, а прием отраженного эхо-сигнала осуществляется на этих же частотах в периодах повторения, соответствующих дальности до цели. При этом РЛС работает по целеуказанию от внешних средств обнаружения или от устройства вторичной обработки информации, реализующей завязку трассы при работе указанной РЛС в режиме поиска целей.
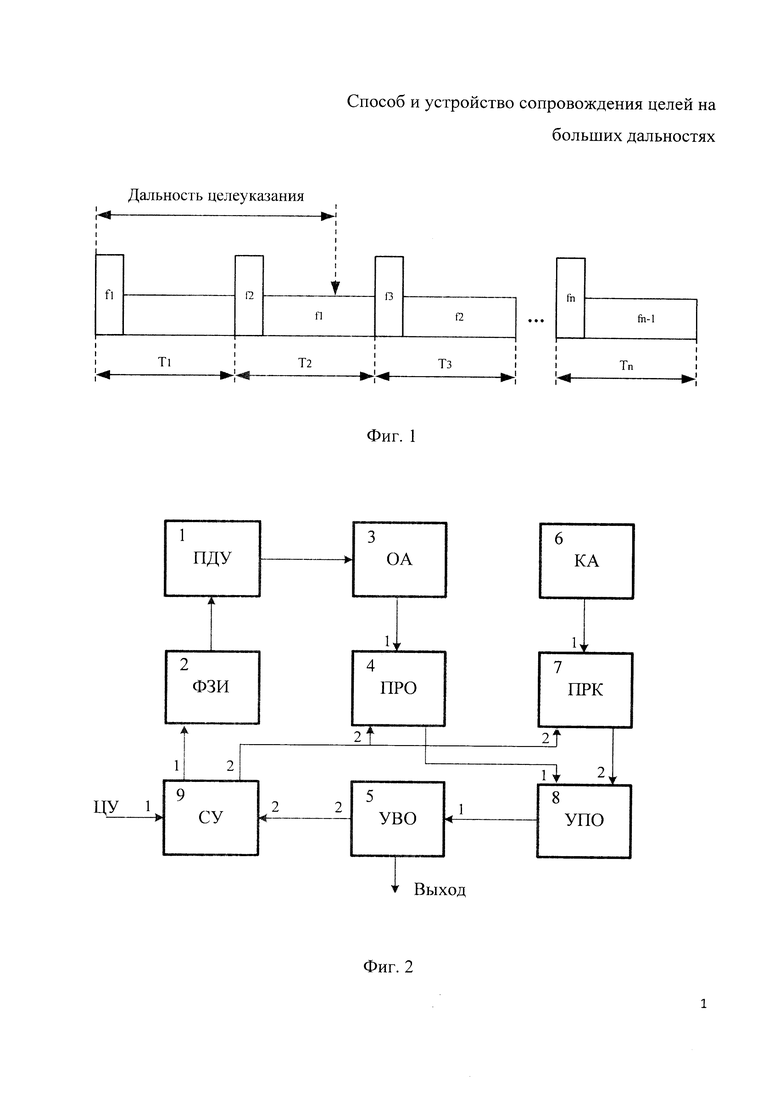
На фигуре 1 иллюстрируется патентуемый способ облучения цели, в соответствии с которым РЛС работает в оптимальном энергетическом режиме, излучая зондирующие импульсы на частотах f1, f2, …, fn в периодах повторения T1, T2, …, Tn соответственно, и принимая отраженные эхо-сигналы на указанных частотах в периодах повторения T1, T3, …, T(n+1). При этом период повторения импульсов Т соответствует инструментальной дальности Динстр.опт, а сопровождение цели осуществляется в интервале дальностей целеуказания от Динстр.опт до 2 Динстр.опт. Если дальность целеуказания лежит в пределах от 2 Динстр.опт до 3 Динстр.опт, то, излучая сигнал на частотах f1, f2, …, fn в периодах повторения T1, Т2, …, Tn, в РЛС должен быть реализован прием отраженного сигнала на этих частотах в периодах повторения T3, T4, …, T(n+2), соответственно. Указанный способ сопровождения целей на больших дальностях, использующий многочастотный метод работы РЛС, при котором излучение зондирующих импульсов производят на частотах, изменяющихся от такта к такту, а прием отраженных сигналов - на тех же частотах, но в других периодах повторения, соответствующих расстоянию до цели, позволяет сохранить оптимальный режим работы с точки зрения средней мощности излучения РЛС, обеспечивая одновременно с этим однозначность измерений дальности. Патентуемый способ облучения может быть реализован в РЛС с АФАР с многочастотным зондирующим сигналом, работающей по целеуказанию от внешних средств обнаружения (например, в составе многодиапазонного комплекса). Использование целеуказания при взятии цели на сопровождение позволяет получать априорную информацию о пространственном расположении цели и в зависимости от ее дальности выбирать для каждой цели индивидуальный закон изменения частоты как внутри периода повторения импульсов, так и от такта к такту.
Устройство, реализующее указанный способ сопровождения целей на больших дальностях, содержит, как и прототип, основную (OA) и компенсационную (КА) антенны, передающее устройство (ПДУ), выход которого соединен с входом OA, формирователь зондирующих импульсов (ФЗИ), выход которого соединен со входом ПДУ, приемники основного (ПРО) и компенсационного (ПРК) каналов, первые входы которых соединены соответственно с выходами OA и КА, устройство первичной обработки (УПО), первый и второй входы которого соединены соответственно с выходами ПРО и ПРК, устройство вторичной обработки (УВО), вход которого соединен с выходом УПО, а первый выход является выходом всего устройства.
Дополнительно в устройство введена схема управления (СУ), соединенная первым выходом со входом ФЗИ, вторым - со вторыми входами ПРО и ПРК, первым входом - с источником сигнала целеуказания (ЦУ), а вторым - со вторым выходом УВО.
Кроме того, ФЗИ, ПДУ, ПРО и ПРК являются устройствами, несущая частота которых изменяется от такта к такту, а УПО - устройством с некогерентным накоплением эхо-сигналов.
На фигуре 2 приведена структурная схема предлагаемого устройства, где обозначено:
1 - передающее устройство (ПДУ);
2 - формирователь зондирующих импульсов (ФЗИ);
3 - основная антенна (OA);
4 - приемник основного канала (ПРО);
5 - устройство вторичной обработки (УВО);
6 - компенсационная антенна (КА);
7 - приемник компенсационного канала (ПРК);
8 - устройство первичной обработки (УПО);
9 - схема управления (СУ).
На фигуре 2 для упрощения не показаны сигналы синхронизации работы устройства.
Как видно из структурной схемы, устройство состоит из основной и компенсационной антенн OA 3 и КА 6 соответственно, твердотельного передающего устройства ПДУ 1, выход которого соединен со входом OA 3, формирователя зондирующих импульсов ФЗИ 2, выход которого соединен со входом ПДУ 1, приемников основного канала ПРО 4 и компенсационного канала ПРК 7, входы которых соединены соответственно с выходами OA 3 и КА 6, устройства первичной обработки УПО 8, первый и второй входы которого соединены соответственно с выходами ПРО 4 и ПРК 7, устройства вторичной обработки УВО 5, вход которого соединен с выходом УПО 8, а первый выход является выходом всего устройства, и схемы управления СУ 9, соединенной первым выходом со входом ФЗИ 2, вторым - со вторыми входами ПРО 4 и ПРК 7, первым входом - с источником сигнала целеуказания (ЦУ), а вторым - со вторым выходом УВО 5.
При этом ФЗИ 2, ПДУ 1, ПРО 4 и ПРК 7 являются устройствами, несущая частота которых изменяется от такта к такту, а УПО - устройством с некогерентным накоплением эхо-сигналов.
В предлагаемом устройстве ПДУ 1 представляет собой широкополосный твердотельный передатчик, работающий с перестройкой несущей частоты от такта к такту и нагруженный на OA 3, представляющую собой АФАР с возможностью двумерного электронного сканирования.
Формирование сложных зондирующих импульсов ФЗИ 2 (частотномодулированных, фазоманипулированных и др.) может производиться как на промежуточной, так и на несущей (как в прототипе) частоте. Главным является то, что выходные сигналы ФЗИ 2, поданные на ПДУ 1, имеют сложную модуляцию и изменяют несущую частоту от такта к такту (в прототипе зондирование пространства на больших дальностях производится на нескольких несущих частотах в одном такте).
Приемные устройства ПРО 4 и ПРК 7 могут быть приемниками прямого усиления (как в прототипе) или выполненными по супергетеродинной схеме. Главным требованием к приемным устройствам является возможность приема эхо-сигналов на несущих частотах, изменяющихся от такта к такту по определенной программе, заданной СУ 9 и зависящей от дальности цели.
В состав УПО 8 аналогично прототипу входят автокомпенсатор, устройство защиты от несинхронных импульсных помех, оптимальный фильтр, накопитель эхо-сигналов, устройство подавления сигналов, принятых по боковым лепесткам диаграммы направленности и устройство измерения координат, однако накопитель является некогерентным.
Предлагаемое устройство работает следующим образом.
По целеуказанию от внешнего источника ЦУ луч РЛС сопровождения устанавливается в заданное угловое направление на выбранную цель. В зависимости от дальности целеуказания в соответствии с патентуемым способом схема управления СУ 9 определяет количество частот облучения и программу изменения частоты как на передачу (от такта к такту), так и на прием (внутри периода).
Соответствующие команды подаются с СУ 9 на ФЗИ 2, ПРО 4 и ПРК 7. ПДУ 1 усиливает сигналы с ФЗИ 2 и передает их на OA 3, откуда сформированный зондирующий сигнал излучается в пространство.
Отраженные от цели эхо-сигналы на каждой из разрешенных частот через основную OA 3 и компенсационную КА 6 антенны поступают в приемники основного и компенсационного каналов ПРО 4 и ПРК 7, на вторые входы которых подается сигнал со второго выхода СУ 9. В приемниках основного и компенсационного каналов ПРО 4 и ПРК 7 отраженные эхо-сигналы усиливаются, селектируются по частоте и преобразуются в цифровой код, после чего поступают на вход устройства первичной обработки информации УПО 8.
В каждом такте зондирования, независимо от частоты излучаемого сигнала, в УПО 8 реализуется внутрипериодная обработка, включающая в себя защиту от активных шумовых помех, защиту от несинхронных импульсных помех, оптимальную фильтрацию эхо-сигнала и некогерентное накопление отраженных от цели сигналов. Сигнал с выхода некогерентного накопителя используется для обнаружения цели. Для этого сигнал поступает на пороговое устройство, устройство подавления сигналов, принятых по боковым лепесткам диаграммы направленности, и устройство измерения координат сопровождаемого объекта. Далее информация об измеренных параметрах цели поступает на УВО 5, где осуществляется вторичная обработка информации, выдаваемая на конечного потребителя по первому выходу УВО 5. При этом информация об измеренных параметрах цели со второго выхода УВО 5 поступает на второй вход схемы управления СУ 9 и может быть использована в качестве целеуказания для последующей работы по сопровождаемой цели.
Таким образом, введение в прототип, содержащий OA, КА, ПДУ, ФЗИ, ПРО, ПРК, УПО и УВО, дополнительно СУ, а также построение ПДУ, ФЗИ, ПРО, ПРК и УПО с указанными свойствами, позволило повысить дальность сопровождения целей при сохранении средней мощности излучения РЛС и однозначности измерения расстояния до целей.
Литература
1. Способ снятия неоднозначности измерения дальности и скорости для импульсно-доплеровских систем, патент РФ №25152253, опубл. 10.05.2014.
2. Устройство устранения неоднозначных измерений дальности до целей, находящихся за пределами рабочей зоны радиолокационной станции, патент РФ №2358284, опубл. 10.06.2009.
3. Способ радиолокационного обнаружения и сопровождения объектов и РЛС для его реализации, патент РФ №2149421, опубл. 20.05.2000.
4. Г.М. Вишин. Многочастотная радиолокация. - М: Воениздат, 1973.
5. Способ измерения радиальной скорости воздушной цели в режиме перестройки частоты от импульса к импульсу по случайному закону при пониженном отношении сигнал/шум, патент РФ №2389039, опубл. 10.05.2010.
6. Подвижная наземная двухкоординатная РЛС кругового обзора метрового диапазона (прототип), патент РФ №2341813, опубл. 20.12.2008.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАДИОЛОКАЦИОННОГО СОПРОВОЖДЕНИЯ ОБЪЕКТОВ И РЛС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2661889C1 |
| СПОСОБ И УСТРОЙСТВО ОБЗОРА ПРОСТРАНСТВА В РЛС | 2014 |
|
RU2564130C1 |
| ПОДВИЖНАЯ НАЗЕМНАЯ ДВУХКООРДИНАТНАЯ РЛС КРУГОВОГО ОБЗОРА МЕТРОВОГО ДИАПАЗОНА | 2006 |
|
RU2341813C2 |
| Способ сопровождения траектории цели в активно-пассивной радиолокационной системе | 2021 |
|
RU2769566C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1985 |
|
RU2145092C1 |
| СПОСОБ И УСТРОЙСТВО ЗАЩИТЫ ОТ "АНГЕЛОВ" ПРИ КОМПЛЕКСИРОВАНИИ РЛС РАЗНЫХ ДИАПАЗОНОВ | 2017 |
|
RU2666783C1 |
| СТАНЦИЯ РАДИОЭЛЕКТРОННОЙ РАЗВЕДКИ И ПОДАВЛЕНИЯ | 1998 |
|
RU2150178C1 |
| СПОСОБ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ, СПОСОБ ФУНКЦИОНИРОВАНИЯ ОБЗОРНОЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ В РЕЖИМЕ АЗИМУТАЛЬНОГО РАЗРЕШЕНИЯ ДВИЖУЩИХСЯ ЦЕЛЕЙ И РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2337373C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2019 |
|
RU2713624C1 |
| СПОСОБ РАСПОЗНАВАНИЯ РАДИОЛОКАЦИОННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2317568C1 |
Изобретение относится к радиолокации и может быть использовано в импульсных радиолокационных станциях (РЛС) сопровождения с активной фазированной антенной решеткой. Достигаемый технический результат - уменьшение временных затрат на обнаружение целей и, как следствие, увеличение производительности РЛС сопровождения, при сохранении однозначности измерения дальности. Указанный технический результат достигается за счет использования многочастотного способа работы, при котором частота зондирующего сигнала изменяется от такта к такту, а прием отраженного эхо-сигнала осуществляется на этих же частотах в периодах повторения, соответствующих дальности до цели. При этом РЛС работает по целеуказанию от внешних средств обнаружения или от устройства вторичной обработки информации, реализующей завязку трассы при работе указанной РЛС в режиме поиска целей. Способ реализуется устройством, состоящим из основной и компенсационной антенны, формирователя зондирующих импульсов, передающего устройства, приемников основного и компенсационного каналов, устройства первичной обработки, устройства вторичной обработки и схемы управления, с соответствующими связями. 2 н.п. ф-лы, 2 ил.
1. Способ сопровождения целей на больших дальностях, использующий многочастотный метод работы РЛС, отличающийся тем, что излучение зондирующих импульсов производят на несущих частотах, изменяющихся от такта к такту, а прием отраженных эхо-сигналов - на тех же частотах, но в других периодах повторения, соответствующих расстоянию до цели, полученному по целеуказанию.
2. Устройство сопровождения целей на больших дальностях с многочастотным зондирующим сигналом, содержащее основную (OA) и компенсационную (КА) антенны, передающее устройство (ПДУ), выход которого соединен с входом OA, формирователь зондирующих импульсов (ФЗИ), выход которого соединен с входом ПДУ, приемники основного (ПРО) и компенсационного (ГТРК) каналов, первые входы которых соединены соответственно с выходами OA и КА, устройство первичной обработки (УПО), первый и второй входы которого соединены соответственно с выходами ПРО и ПРК, устройство вторичной обработки (УВО), вход которого соединен с выходом УПО, а первый выход является выходом всего устройства, отличающееся тем, что в него введена схема управления (СУ), соединенная первым выходом с входом ФЗИ, вторым - со вторыми входами ПРО и ПРК, первым входом - с источником сигнала целеуказания (ЦУ), а вторым - со вторым выходом УВО, при этом ФЗИ, ПДУ, ПРО и ПРК являются устройствами, несущая частота в которых изменяется от такта к такту по определенному закону, задаваемому в СУ, а УПО - устройством с некогерентным накоплением эхо-сигналов.
| ПОДВИЖНАЯ НАЗЕМНАЯ ДВУХКООРДИНАТНАЯ РЛС КРУГОВОГО ОБЗОРА МЕТРОВОГО ДИАПАЗОНА | 2006 |
|
RU2341813C2 |
| Автоматический выключатель питательных приборов | 1933 |
|
SU41524A1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1985 |
|
RU2145092C1 |
| Способ разделения щелочных металлов | 1961 |
|
SU149404A1 |
| JP 11142504 A, 28.05.1999 | |||
| Шкаф для охлаждения продуктов на горизонтальных сплошных подложках | 1983 |
|
SU1186908A1 |
| US 5396252 A, 07.03.1995. | |||

