ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к устройству помощи при вождении.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
В обычном устройстве помощи при вождении, помощь при вождении обеспечивается, при этом принимая во внимание объекты, которые выскакивают из мертвой зоны при въезде на пересечение или подобное. Например, устройство помощи при вождении, описываемое в Патентном Документе 1: прогнозирует курс базового транспортного средства; распознает мертвую зону, которая невидна водителю в направлении продвижения базового транспортного средства; прогнозирует объект, который может выскочить из мертвой зоны; обнаруживает диапазон перемещения объекта; определяет то, что может произойти столкновение, когда диапазон пересекается с прогнозируемым курсом базового транспортного средства; и выполняет помощь при вождении, чтобы избежать столкновения.
Патентный Документ 1: Японская Публикация Патентной Заявки № 2006-260217
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Тем не менее, данное обычное устройство помощи при вождении обеспечивает помощь при вождении, используя прогнозируемый курс базового транспортного средства. Вследствие этого, обычное устройство помощи при вождении избегает столкновения посредством определения того, произойдет или нет столкновение, если базовое транспортное средство движется вдоль прогнозированного в настоящий момент курса, но не может вычислить: уменьшение скорости, требуемое чтобы избежать столкновения; величину уклонения, требуемую чтобы избежать столкновения; и т.п. Кроме того, определение столкновения, выполняемое обычным устройством помощи при вождении, сильно зависит от точности, с которой прогнозируется будущая позиция базового транспортного средства, и вследствие этого, точность определения столкновения может уменьшаться, когда ухудшается точность прогнозирования (при выполнении ускорения, замедления, или управления направлением движения в базовом транспортном средстве, например). В данном случае обычное устройство помощи при вождении может обеспечивать ненужную помощь при вождении или может не обеспечивать помощи при вождении в требуемые моменты времени, вызывая у водителя ощущение дискомфорта.
Изобретение было разработано для решения этих проблем, и его цель состоит в предоставлении устройства помощи при вождении, которое может обеспечить должную помощь при вождении, при которой может быть надежно обеспечена безопасность.
Устройство помощи при вождении включает в себя: блок распознавания мертвой зоны, который распознает мертвую зону, которая не видна водителю в направлении продвижения базового транспортного средства; блок установки информации о движущемся теле, который устанавливает, в качестве информации, которая относится к движущемуся телу, которое может выскочить из мертвой зоны, информацию о движущемся теле, включающую в себя, по меньшей мере, предполагаемую скорость движущегося тела; блок вычисления области скорости, который вычисляет, на основании информации о движущемся теле, установленной блоком установки информации о движущемся теле, область скорости базового транспортного средства, при этом область скорости является областью, в которой базовое транспортное средство может контактировать с движущемся телом, когда базовое транспортное средство движется в направлении продвижения; и блок вычисления целевой скорости, который вычисляет целевую скорость базового транспортного средства на основании области скорости.
В устройстве помощи при вождении, блок установки информации о движущемся теле прогнозирует движущееся тело, которое может выскочить из мертвой зоны, и устанавливает информацию о движущемся теле, которая относится к движущемуся телу. Кроме того, блок вычисления области скорости может вычислять скорость движения базового транспортного средства, при которой базовое транспортное средство может войти в контакт с движущимся телом, на основании предполагаемой скорости движущегося тела, в отношении которого прогнозировано, что оно может выскочить из мертвой зоны. Затем блок вычисления области скорости может вычислить область скорости, в которой базовое транспортное средство может войти в контакт с движущимся телом, в качестве области скорости базового транспортного средства. Блок вычисления целевой скорости вычисляет целевую скорость на основании вычисленной области скорости. Следовательно, устройство помощи при вождении, в отличие от сравнения предполагаемого движущегося тела с прогнозированным курсом базового транспортного средства, вычисляет область скорости, в которой может произойти контакт с движущимся телом, и затем вычисляет целевую скорость на основании данного вычисления. Посредством этого, устройство помощи при вождении может выполнить управление на основании конкретной целевой скорости, при которой базовое транспортное средство должно двигаться, и, вследствие этого, обеспечивает помощь при вождении, при которой обеспечивается высокая степень безопасности. Кроме того, помощь при вождении, обеспечиваемая устройством помощи при вождении, не подвержена влиянию точности, с которой прогнозируется маршрут базового транспортного средства, и, вследствие этого, может быть обеспечена должная помощь при вождении. В результате, устройство помощи при вождении выполнено с возможностью обеспечения должной помощи при вождении, при которой может быть надежно обеспечена безопасность.
В устройстве помощи при вождении, область скорости может быть определена из зависимости между скоростью базового транспортного средства и расстоянием базового транспортного средства до опорной позиции в местоположении, составляющем мертвую зону.
Устройство помощи при вождении дополнительно может включать в себя блок вычисления целевой поперечной позиции, который вычисляет целевую поперечную позицию базового транспортного средства на основании области скорости, вычисленной блоком вычисления области скорости. Размер мертвой зоны меняется в зависимости от поперечной позиции базового транспортного средства, что приводит к изменению опасности контакта с движущимся телом. Следовательно, при наличии блока вычисления целевой поперечной позиции, вычисляющего целевую поперечную позицию, устройство помощи при вождении может обеспечивать должную помощь при вождении таким образом, что базовое транспортное средство движется в безопасной поперечной позиции.
В устройстве помощи при вождении, блок установки информации о движущемся теле может устанавливать информацию о движущемся теле на основании формы дороги, составляющей мертвую зону. Поведение движущегося тела, которое может выскочить из мертвой зоны, зависит от формы дороги, и, вследствие этого, принимая во внимание форму дороги, устройство помощи при вождении может обеспечивать помощь при вождении с более высокой степенью точности.
В устройстве помощи при вождении, блок установки информации о движущемся теле может устанавливать информацию о движущемся теле на основании соотношения между шириной полосы движения стороны движущегося тела и шириной полосы движения стороны базового транспортного средства. Посредством учета соотношения между соответствующими ширинами полос движения подобным образом, устройство помощи при движении может обеспечивать помощь при движении, более точно приведенную в соответствие с ощущениями водителя и фактической скоростью, с которой выскакивает движущееся тело.
В устройстве помощи при вождении, блок установки информации о движущемся теле может устанавливать информацию о движущемся теле на основании периферийной среды мертвой зоны. Принимая во внимание периферийную среду мертвой зоны подобным образом, устройство помощи при вождении может обеспечивать помощь при вождении более точно приведенную в соответствие с ощущениями водителя.
Устройство помощи при вождении дополнительно включает в себя блок получения информации о дорожном движении, который получает информацию о дорожном движении, которая относится к дороге, составляющей мертвую зону, и блок установки информации о движущемся теле может устанавливать информацию о движущемся теле на основании информации о дорожном движении, полученной блоком получения информации о дорожном движении. Принимая во внимания информацию о дорожном движении, которая не может быть просто извлечена из информации, которая относится к периферии мертвой зоны, подобным образом, устройство помощи при вождении может обеспечивать эффективную помощь при вождении, при которой может быть надежно обеспечена безопасность, когда базовое транспортное средство движется вдоль дороги с чрезвычайно опасной мертвой зоной.
Устройство помощи при вождении может дополнительно включать в себя блок получения информации об опыте, который получает информацию об опыте, указывающую прошлый опыт водителя, и блок установки информации о движущемся теле может устанавливать информацию о движущемся теле на основании информации об опыте, полученной блоком получения информации об опыте. Используя информацию, указывающую прошлый опыт водителя, подобным образом, устройство помощи при вождении может обеспечивать помощь при вождении в соответствии с опытом водителя.
Устройство помощи при вождении может дополнительно включать в себя блок получения информации об объекте, который получает информацию об объекте, которая относится к поведению объекта, присутствующего в периферии базового транспортного средства, и блок установки информации о движущемся теле может устанавливать информацию о движущемся теле на основании информации об объекте, полученной блоком получения информации об объекте. Поведение объектов в периферии базового транспортного средства также оказывает влияние на скорость и т.д. движущегося тела, которое выскакивает, и принимая во внимание данную информацию, устройство помощи при вождении может обеспечивать помощь при вождении более подходящую к ситуации.
Устройство помощи при вождении может дополнительно включать в себя блок управления выдачей предупреждения, который выдает предупреждение водителю, чтобы предупредить водителя о мертвой зоне, и когда мертвая зона присутствует в нескольких направлениях, блок управления выдачей предупреждения может определять опасное направление, по которому присутствует большая опасность, на основании формы области скорости, вычисленной блоком вычисления области скорости, и управлять выдачей предупреждения таким образом, что водитель смотрит в опасном направлении. Таким образом, устройство помощи при вождении может выдавать предупреждение, которое заставляет водителя посмотреть в опасном направлении, в котором присутствует большая опасность, и в результате, может быть улучшен эффект предвосхищения опасности.
Устройство помощи при вождении может дополнительно включать в себя блок обнаружения направления взгляда, который обнаруживает направление взгляда водителя, и блок управления выдачей предупреждения может управлять выдачей предупреждения на основании опасного направления и направления взгляда. Посредством управления выдачей предупреждения, принимая во внимание направление взгляда водителя, подобным образом, может быть уменьшена нагрузка на водителя, и в ситуации, когда помощь при вождении становится фактически необходимой, помощь при вождении может быть исполнена более эффективно.
В соответствии с изобретением, может быть обеспечена должная помощь при вождении, и в результате, может быть надежно обеспечена безопасность.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 является структурной схемой, показывающей конфигурацию устройства помощи при вождении в соответствии с вариантом осуществления.
Фиг. 2 является видом, показывающим пример условия непосредственно перед тем, как базовое транспортное средство въезжает на пересечение.
Фиг. 3 является блок-схемой, показывающей содержимое обработки, выполняемой устройством помощи при вождении.
Фиг. 4 является схемой модели, используемой блоком вычисления области скорости для вычисления условия A.
Фиг. 5 является схемой модели, используемой блоком вычисления области скорости для вычисления условия B.
Фиг. 6 является схемой модели, используемой блоком вычисления области скорости для вычисления условия C.
Фиг. 7 является схемой модели, используемой блоком вычисления области скорости для вычисления условия D.
Фиг. 8 является графиком, показывающим зону опасности.
Фиг. 9 является видом, иллюстрирующим боковые интервалы.
Фиг. 10 является примером карты, показывающей зависимость между скоростью и поперечной позицией транспортного средства в точке входа в мертвую зону.
Фиг. 11 является видом, показывающим пример элементов, принимаемых во внимание блоком установки информации о движущемся теле, при установке информации о движущемся теле.
Фиг. 12 является видом, показывающим пример шаблонов управления на основании вычисленного опасного направления и направления взгляда водителя.
ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Ниже со ссылкой на чертежи будет описан вариант осуществления устройства помощи при вождении.
Фиг. 1 является структурной схемой, показывающей конфигурацию устройства помощи при вождении в соответствии с данным вариантом осуществления. Фиг. 2 является видом, показывающим пример условия непосредственно перед въездом базового транспортного средства SM на пересечение. На пересечении, показанном на Фиг. 2, полоса движения, по которой движется базовое транспортное средство SM, обозначена как LD1, а полоса движения, пересекающая полосу LD1 движения, обозначена как LD2. На Фиг. 2, предполагается, что полоса LD1 движения, по которой движется базовое транспортное средство SM, является приоритетной полосой движения. Также предполагается, что структуры, такие как стены, ограждения, и здания предусмотрены по обе стороны, по меньшей мере, полосы LD1 движения. На данном типе пересечения, как показано на Фиг. 1, мертвая зона DE1 формируется по правую сторону от базового транспортного средства SM, и мертвая зона DE2 формируется по левую сторону от базового транспортного средства SM. Зона обзора водителя DP базового транспортного средства SM блокируется углом P1 правой стороны и углом P2 левой стороны. Следовательно, мертвая зона DE1 правой стороны формируется в области с правой стороны от линии SL1 визирования, проходящей через угол P1 правой стороны, в то время как мертвая зона DE2 левой стороны формируется в области с левой стороны от линии SL2 визирования, проходящей через угол P2 левой стороны. Устройство 1 помощи при вождении выполняет помощь при вождении на базовом транспортном средстве SM таким образом, что может быть надежно предотвращено столкновение, когда движущееся тело выскакивает из мертвых зон DE1, 2. Следует отметить, что в данном варианте осуществления, в качестве движущихся тел, которые могут выскочить из мертвых зон DE1, 2, предполагаются другие транспортные средства RM, LM.
Как показано на Фиг. 1, устройство 1 помощи при вождении включает в себя: электронный блок 2 управления (ECU); блок 3 получения информации о пространстве снаружи транспортного средства; блок 4 получения информации о пространстве внутри транспортного средства; систему 6 навигации; блок 7 хранения информации; блок 8 отображения; блок 9 формирования звука; и блок 11 помощи при движении.
Блок 3 получения информации о пространстве снаружи транспортного средства обладает функцией получения информации, которая относится к пространству снаружи или периферии базового транспортного средства SM. В частности, блок 3 получения информации о пространстве снаружи транспортного средства обладает функцией получения различной информации, которая относится к: структурам, образующим мертвые зоны на периферии базового транспортного средства SM; движущимся объектам, таким как автомобили, пешеходы, и велосипеды; линиям дорожной разметки и стоп-линиям вблизи пересечения; и т.д. Блок 3 получения информации о пространстве снаружи транспортного средства состоит, например, из: камеры, которая получает изображения периферии базового транспортного средства SM; радара миллиметровых волн; лазерного радара; и т.п. Блок 3 получения информации о пространстве снаружи транспортного средства может обнаруживать структуры по любую сторону от полосы движения и объекты, такие как транспортные средства, посредством обнаружения граней, присутствующих в периферии транспортного средства, используя, например, радар. Кроме того, блок 3 получения информации о пространстве снаружи транспортного средства может обнаруживать линии дорожной разметки, пешеходов, и велосипеды в периферии базового транспортного средства SM, используя, например, изображения, захваченные камерой. Блок 3 получения информации о пространстве снаружи транспортного средства выдает полученную информацию о пространстве снаружи транспортного средства ECU 2.
Блок 4 получения информации о пространстве внутри транспортного средства обладает функцией получения информации, которая относится к внутренней части базового транспортного средства SM. В частности, блок 4 получения информации о пространстве внутри транспортного средства выполнен с возможностью обнаружения: позиции водителя DP внутри базового транспортного средства SM; ориентации головы и направления линии визирования водителя DP; и т.п. Блок 4 получения информации о пространстве внутри транспортного средства состоит, например, из камеры или подобного, которая предусмотрена в непосредственной близости от водительского сиденья для захвата изображений водителя DP. Блок 4 получения информации о пространстве внутри транспортного средства выдает полученную информацию о пространстве внутри транспортного средства ECU 2.
Система 6 навигации включает в себя различную информацию, используемую для выдачи инструкций водителю DP, такую как информацию карты, информацию о дороге, информации о дорожном движении. Система 6 навигации выдает предварительно определенную информацию ECU 2 в требуемые моменты времени. Блок 7 хранения информации обладает функцией хранения различной информации, и выполнен с возможностью хранения прошлой информации о вождении, которая относится к водителю DP, например. Блок 7 хранения информации выдает предварительно определенную информацию ECU 2 в требуемые моменты времени.
Блок 8 отображения, блок 9 формирования звука, и блок 11 помощи при движении обладают функциями помощи при вождении водителем DP в соответствии с сигналами управления от ECU 2. Блок 8 отображения состоит из: монитора; проекционного дисплея, или подобного, например, и обладает функцией отображения информации, используемой во время помощи при вождении. Модуль 9 формирования звука состоит из: громкоговорителя; зуммера; или подобного, и обладает функцией для формирования голоса или звука зуммера во время помощи при вождении. Блок 11 помощи при движении состоит из: тормозного устройства; приводного устройства; и рулевого устройства, и обладает функциями замедления базового транспортного средства SM до целевой скорости и перемещения базового транспортного средства SM в целевую поперечную позицию.
ECU 2 выполняет общее управление устройством 1 помощи при вождении. ECU 2 преимущественно состоит из CPU, например, и также включает в себя постоянное запоминающее устройство (ROM), запоминающее устройство с произвольной выборкой (RAM), схему входного сигнала, схему выходного сигнала, схему подачи питания, и т.п. ECU 2 включает в себя: блок 21 распознавания мертвой зоны; блок 22 установки информации о движущемся теле; блок 23 вычисления области скорости; блок 24 вычисления целевой скорости; блок 25 вычисления целевой поперечной позиции; блок 26 получения информации о дорожном движении; блок 27 получения информации об опыте; блок 28 получения информации об объекте; блок 29 обнаружения направления взгляда; и блок 31 управления помощью при вождении.
Блок 21 распознавания мертвой зоны обладает функцией распознавания мертвой зоны, которая не видна водителю DP в направлении продвижения базового транспортного средства SM. Блок 21 распознавания мертвой зоны получает позицию базового транспортного средства SM, позицию водителя DP, позицию пересечения между полосами LD1, LD2 движения (и позиции структур, формирующих мертвую зону), и т.п. из различной информации, полученной блоком 3 получения информации о пространстве снаружи транспортного средства и блоком 4 получения информации о пространстве внутри транспортного средства, и может распознавать мертвую зону из зависимостей между соответствующими позициями. В примере, показанном на Фиг. 2, распознаются позиция базового транспортного средства SM на полосе LD1 движения и позиция водителя DP в базовом транспортном средстве SM, и вследствие этого блок 21 распознавания мертвой зоны может распознать мертвые зоны DE1, DE2 на основании позиционной зависимости между водителем DP и углами P1, P2.
Блок 22 установки информации о движущемся теле обладает функцией установки информации о движущемся теле, которая относится к движущемуся телу, которое может выскочить из мертвой зоны. Информация о движущемся теле включает в себя, например: информацию, которая относится к предполагаемой скорости; предполагаемую позицию, и предполагаемый размер движущегося тела. В примере, показанном на Фиг. 2, блок 22 установки информации о движущемся теле прогнозирует другое транспортное средство RM, которое может выскочить из мертвой зоны DE1 с правой стороны и другое транспортное средство LM, которое может выскочить из мертвой зоны DE2 с левой стороны, в качестве движущихся тел. Другие транспортные средства RM, LM предполагаются в качестве объектов, которые могут выскочить, и не являются фактически обнаруженными. Блок 22 установки информации о движущемся теле устанавливает предполагаемые скорости, предполагаемые позиции, и предполагаемые размеры других транспортных средств RM, LM. Отсутствуют конкретные ограничения на способ установки информации о движущемся теле, однако ниже подробно будет описан пример.
Блок 23 вычисления области скорости обладает функцией вычисления, на основании информации о движущемся теле, установленной боком 22 установки информации о движущемся теле, области скорости базового транспортного средства, в которой базовое транспортное средство может войти в контакт с движущимся телом, если базовое транспортное средство движется в направлении продвижения. Область скорости определяется из зависимости между скоростью базового транспортного средства и расстоянием базового транспортного средства до опорной позиции в местоположении, составляющем мертвую зону. В частности, как показано на Фиг. 8, блок 23 вычисления области скорости определяет зону DZ опасности в качестве области скорости, в которой вероятность столкновения с другим транспортным средством, которое выскакивает, высокая, посредством выполнения вычисления, используя систему координат, в которой скорость V базового транспортного средства SM устанавливается по ординате, а расстояние L базового транспортного средства SM до точки входа в мертвую зону устанавливается по абсциссе. Когда другое транспортное средство внезапно выскакивает из мертвой зоны, в то время как базовое транспортное средство SM движется со скоростью и в позиции (расстояние до точки входа в мертвую зону) в пределах зоны DZ опасности, вероятность столкновения между базовым транспортным средством SM и другим транспортным средством на пересечении увеличивается. Способ вычисления зоны DZ опасности будет описан ниже. Следует отметить, что точка входа в мертвую зону, в которой L=0, на графике зоны DZ опасности, является опорной позицией, установленной при желании в зависимости от мертвой зоны. Другими словами, точка входа в мертвую зону является опорной позицией, установленной в местоположении, составляющем мертвую зону (т.е. пересечение) для того, чтобы указать расстояние между мертвой зоной и базовым транспортным средством SM. Опорная позиция устанавливается для использования во время вычисления, и может быть установлена в любой позиции относительно пересечения. В данном варианте осуществления, точка входа в мертвую зону, установленная в качестве опорной позиции, является позицией границы между позицией, в которой рассматривается возникновение вероятности контакта между базовым транспортным средством SM и движущимся телом, выскакивающим из мертвой зоны, и позицией, в которой рассматривается отсутствие вероятности контакта между базовым транспортным средством SM и движущимся телом, которое выскакивает. В примере на Фиг. 2, часть боковой грани базового транспортного средство SM по полосе LD2 движения, или другими словами, прямолинейная часть, связывающая угол P1 и угол P2, устанавливается в качестве точки SDL входа в мертвую зону. При желании опорная позиция может быть установлена в соответствии с формами дорог на пересечении, компоновками и формами структур, составляющих мертвую зону, и т.п.
Блок 24 вычисления целевой скорости обладает функцией вычисления целевой скорости базового транспортного средства SM на основании области скорости, вычисленной блоком 23 вычисления области скорости, или, другими словами, зоны DZ опасности. В частности, блок 24 вычисления целевой скорости устанавливает целевую скорость таким образом, чтобы избежать зоны DZ опасности. Блок 24 вычисления целевой скорости вычисляет скорость, при которой базовое транспортное средство SM не входит в зону DZ опасности после прохождения точки SDL входа в мертвую зону, и устанавливает данную скорость в качестве целевой скорости. Способ установки целевой скорости будет описан ниже.
Блок 25 вычисления целевой поперечной позиции обладает функцией вычисления целевой поперечной позиции базового транспортного средства SM на основании области скорости, вычисленной блоком 23 вычисления области скорости, или, другими словами, зоны DZ опасности. Блок 25 вычисления целевой поперечной позиции вычисляет поперечную позицию, в которой может быть увеличена безопасность, когда базовое транспортное средство SM проходит точку SDL входа в мертвую зону, и устанавливает данную поперечную позицию в качестве целевой поперечной позиции. Способ установки целевой поперечной позиции будет описан ниже.
Блок 26 получения информации о дорожном движении обладает функцией получения информации о дорожном движении, которая относится к дорогам, составляющим мертвую зону, или, другими словами, пересечению, на которое въедет базовое транспортное средство SM. Блок 26 получения информации о дорожном движении может получать информацию о дорожном движении от системы 6 навигации и блока 7 хранения информации. Информация о дорожном движении включает в себя, например, среднюю интенсивность движения по дороге накрестлежащей стороны, число и частоту прошлых аварий, количество пешеходов, и т.п.
Блок 27 получения информации об опыте обладает функцией получения информации, указывающей прошлый опыт водителя DP. Блок 27 получения информации об опыте получает информацию из блока 7 хранения информации. Информация об опыте включает в себя, например, количество раз, которое водитель DP пересекал зависимое пересечение в прошлом, частоту пересечения, количество времени с момента предыдущего пересечения, и т.п.
Блок 28 получения информации об объекте обладает функцией получения информации об объекте, которая относится к поведению объекта, присутствующего в периферии базового транспортного средства SM. Объект в частности не ограничивается, и может быть любым объектом, который оказывает влияние на движущееся тело по полосе движения накрестлежащей стороны. Примеры объектов включают в себя предшествующее транспортное средство, приближающееся транспортное средство, пешехода, мотоцикл, велосипед, и т.п. Информация об объекте включает в себя информацию, указывающую позицию, размер, направление перемещения, скорость перемещения, и т.п. объекта. Блок 28 получения информации об объекте может получать информацию об объекте от блока 3 получения информации о пространстве снаружи транспортного средства.
Блок 29 обнаружения направления взгляда обладает функцией обнаружения направления взгляда водителя DP. Блок 29 обнаружения направления взгляда получает информацию от блока 4 получения информации о пространстве внутри транспортного средства, и может обнаруживать направление взгляда из ориентации лица и ориентации линии визирования водителя DP.
Блок 31 управления помощью при вождении обладает функцией управления помощью при вождении посредством передачи сигналов управления блоку 8 отображения, блоку 9 формирования звука, и блоку 11 помощи при движении на основании результатов различных вычислений. Блок 31 управления помощью при вождении обладает функцией выполнения помощи при вождении таким образом, что базовое транспортное средством SM въезжает на пересечение с целевой скоростью и в целевой поперечной позиции. Способ помощи будет описан подробно ниже. Блок 31 управления помощью при вождении также обладает функцией определения опасного направления, по которому присутствует большая опасность, на основании формы области скорости (зоны DZ опасности), вычисляемой блоком 23 вычисления области скорости, когда мертвая зона присутствует в нескольких направлениях. Блок 31 управления помощью при вождении также обладает функцией выдачи предупреждения водителю DP, используя блок 8 отображения и блок 9 формирования звука, чтобы заставить водителя DP посмотреть в опасном направлении.
Далее, обращаясь к Фиг. с 2 по 12, будет описана конкретная обработка управления, выполняемая устройством 1 помощи при вождении. В данном варианте осуществления, будет описано содержание обработки в ситуации, когда базовое транспортное средство SM въезжает на пересечение, такое как то, что показано на Фиг. 2. Фиг. 3 является блок-схемой, показывающей содержание обработки, выполняемой устройством 1 помощи при вождении. Данная обработка исполняется неоднократно через интервалы фиксированного периода, в то время как функционирует базовое транспортное средство.
Как показано на Фиг. 3, блок 21 распознавания мертвой зоны ECU 2 распознает мертвую зону на основании информации от блока 3 получения информации о пространстве снаружи транспортного средства и блока 4 получения информации о пространстве внутри транспортного средства (этап S100). Блок 21 распознавания мертвой зоны узнает позицию базового транспортного средства SM на полосе LD1 движения, позицию водителя DP в базовом транспортном средстве SM, и позиции структур, составляющих мертвую зону в направлении продвижения. Затем блок 21 распознавания мертвой зоны может распознать мертвые зоны DE1, DE2 на основании позиционной зависимости между водителем DP и углами P1, P2. Следует отметить, что на Фиг. 2, размер в направлении по ширине транспортного средства и размер в направлении вперед-назад базового транспортного средства SM обозначены как B и A соответственно (эти размеры базового транспортного средства SM могут быть сохранены заранее). Что касается поперечной позиции базового транспортного средства SM, то используя в качестве опорной линии осевую линию, боковой интервал слева и боковой интервал справа внутри полосы LD1 движения, обозначены как W1 и W2, соответственно. Кроме того, расстояние между передним краем базового транспортного средства SM и точкой SDL входа в мертвую зону обозначается как L. Что касается позиции водителя DP в базовом транспортном средстве SM, то расстояние водителя DP в направлении ширины от осевой линии базового транспортного средства SM обозначено как BD, а расстояние водителя DP по направлению вперед-назад от переднего края базового транспортного средства SM обозначено как AD. Посредством указания позиции водителя DP, указывается линия SL1 визирования, проходящая через угол P1 правой стороны, что позволяет указать мертвую зону DE1, и указывается линия SL2 визирования, проходящая через угол P2 левой стороны, что позволяет указать мертвую зону DE2. Следует отметить, что соответствующие диапазоны мертвых зон DE1, 2 меняются в зависимости от позиции (L, W1, W2) базового транспортного средства SM, однако блок 21 распознавания мертвой зоны может указать диапазоны мертвых зон DE1, 2 непосредственно через вычисление из позиционной зависимости между водителем DP и углами P1, P2.
Блок 21 распознавания мертвой зоны определяет, на основании мертвых зон DE1, 2, распознанных на этапе S100, является ли расстояние между текущей позицией базового транспортного средства SM до мертвых зон DE1, 2 (или до точки SDL входа в мертвую зону) равным или меньше предварительно определенному пороговому значению TL (этап S105). Когда блоком 21 распознавания мертвой зоны на этапе S105 определяется, что расстояние больше порогового значения TL, то обработка, показанная на Фиг. 3, прекращается, вследствие чего обработка повторяется с этапа S100. Подобным образом обработка прекращается, когда на этапе S100 мертвая зона не может быть распознана. С другой стороны, когда блок 21 распознавания мертвой зоны определяет, что расстояние равно или меньше пороговому значению TL, обработка переходит к этапу S110.
Блок 22 установки информации о движущемся теле прогнозирует движущиеся тела, которые могут выскочить из мертвых зон DE1, 2, и устанавливает информацию о движущемся теле, которая относится к движущимся телам (этап S110). На Фиг. 2, блок 22 установки информации о движущемся теле прогнозирует то, что другое транспортное средство RM может выскочить из мертвой зоны DE1 с правой стороны, и то, что другое транспортное средство LM может выскочить из мертвой зоны DE2 с левой стороны. Затем блок 22 установки информации о движущемся теле устанавливает предполагаемые скорости, предполагаемые позиции, и предполагаемые размеры других транспортных средств RM, LM, в качестве информации о движущемся теле. Здесь, блок 22 установки информации о движущемся теле устанавливает предполагаемую скорость VR, предполагаемый размер BR в направлении по ширине, и предполагаемый размер AR в направлении вперед-назад другого транспортного средства RM. Блок 22 установки информации о движущемся теле также устанавливает предполагаемую поперечную позицию WR другого транспортного средства RM. Здесь следует отметить, что предполагаемая поперечная позиция устанавливается в качестве бокового интервала к левой стороне по направлению продвижения, используя осевую линию другого транспортного средства RM в качестве опорной линии. Блок 22 установки информации о движущемся теле устанавливает позицию, в которой другое транспортное средство RM сначала выскакивает из мертвой зоны DE1 в качестве предполагаемой позиции направления продвижения другого транспортного средства RM. Другими словами, позиция, в которой часть P3 переднего угла правой стороны другого транспортного средства RM входит в линию SL1 визирования, устанавливается в качестве предполагаемой позиции. Блок 22 установки информации о движущемся теле устанавливает предполагаемую скорость VL, предполагаемый размер BL в направлении по ширине, и предполагаемый размер AL в направлении вперед-назад другого транспортного средства LM. Блок 22 установки информации о движущемся теле также устанавливает предполагаемую поперечную позицию WL другого транспортного средства LM. Здесь, предполагаемая поперечная позиция устанавливается в качестве бокового интервала к правой стороне по направлению продвижения, используя осевую линию другого транспортного средства LM в качестве опорной линии. Блок 22 установки информации о движущемся теле устанавливает позицию, в которой другое транспортное средство LM сначала выскакивает из мертвой зоны DE2 в качестве предполагаемой позиции направления продвижения другого транспортного средства LM. Другими словами, позиция, в которой часть P4 переднего угла левой стороны другого транспортного средства LM входит в линию SL2 визирования, устанавливается в качестве предполагаемой позиции.
Отсутствуют конкретные ограничения на способ установки предполагаемой скорости, и учета ширины полосы движения полосы LD2 движения накрестлежащей стороны и т.п., и разрешенная скорость дороги накрестлежащей стороны, средняя скорость въезда транспортного средства на основании прошлой статистики, или скорость идентичная скорости базового транспортного средства SM, например, может быть установлена в качестве предполагаемой скорости. Также отсутствуют конкретные ограничения на способ установки предполагаемой позиции (предполагаемой поперечной позиции), и центральная позиция полосы движения, средняя позиция въезда транспортного средства на основании прошлой статистики, или позиция идентичная позиции базового транспортного средства SM, например, может быть установлена в качестве предполагаемой позиции. Подобным образом отсутствуют конкретные ограничения на способ установки предполагаемого размера другого транспортного средства, и данные подготовленные заранее в качестве типичного размера транспортного средства, средний размер типичного пассажирского транспортного средства, или размер идентичный размеру базового транспортного средства SM, например, может быть установлен в качестве предполагаемого размера.
Блок 22 установки информации о движущемся теле также может устанавливать информацию о движущемся теле на основании форм дорог, составляющих мертвые зоны DE1, 2 (т.е., формы пересечения). В случае Т-образного примыкания, такого как то, что показано на Фиг. 11A, например, другое транспортное средство может выполнять только поворот направо или налево, и, вследствие этого, прогнозирует большое уменьшение скорости в сравнении с движением вперед. Кроме того, в случае перекрестка, необходимо прогнозировать то, что другие транспортные средства выскочат как слева, так и справа, тогда как в случае T-образного примыкания необходимо прогнозировать только то, что другое транспортное средство выскочит из одной полосы LD3 движения. Следовательно, когда пересечением, на которое будет осуществлен въезд, является T-образным примыканием, то блок 22 установки информации о движущееся теле может устанавливать предполагаемую скорость и предполагаемую позицию другого транспортного средства посредством модификации предполагаемой скорости и позиции, устанавливаемых в случае перекрестка. Принимая во внимание форму дороги, устройство 1 помощи при вождении может обеспечивать помощь при вождении с большей степенью точности. Следует отметить, что информация, которая относится к форме дороги, может быть получена блоком 22 установки информации о движущемся теле от системы 6 навигации или посредством обнаружения формы дороги непосредственно блоком 3 получения информации о пространстве снаружи транспортного средства.
Блок 22 установки информации о движущемся теле также может устанавливать информацию о движущемся теле на основании соотношения между шириной полосы движения со стороны другого транспортного средства и шириной полосы движения со стороны базового транспортного средства. Например, когда дорога со стороны базового транспортного средства является стороной большого приоритета, а дорога накрестлежащей стороны является небольшой дорогой, то маловероятно, что транспортное средство накрестлежащей стороны въедет на пересечение без замедления. С другой стороны, когда соответствующие размеры дороги на стороне базового транспортного средства и дороги накрестлежащей стороны идентичны или дорога накрестлежащей стороны больше, то более вероятно, что транспортное средство накрестлежащей стороны въезжает на пересечение без замедления. Следовательно, блок 22 установки информации о движущемся теле устанавливает предполагаемую скорость другого транспортного средства, принимая во внимание соотношение между шириной полосы движения со стороны другого транспортного средства и шириной полосы движения со стороны базового транспортного средства на основании карты, такой как та, что показана на Фиг. 11B. При учете соотношения между соответствующими ширинами полос движения подобным образом, устройство 1 помощи при вождении может обеспечивать помощь при вождении более точно приведенную в соответствие с ощущениями водителя и фактической скоростью, с которой выскакивает движущееся тело.
Блок 22 установки информации о движущемся теле также может устанавливать информацию о движущемся теле на основании периферийной среды мертвых зон DE1, 2. В частности, блок 22 установки информации о движущемся теле устанавливает информацию, которая относится к перемещению другого транспортного средства на основании периферийной среды мертвых зон DE1, 2, как впрочем, и формы пересечения. Например, когда на пересечении располагается вогнутое зеркало, то может быть определено, что скорость другого транспортного средства уменьшится. Кроме того, когда на полосе движения транспортного средства накрестлежащей стороны располагается стоп-линия близко к пересечению и стоп-линия может быть видна из базового транспортного средства, то может быть определено, что точка, с которой другое транспортное средство начинает замедляться, будет позже. В данном случае, может быть определено, что другое транспортное средство не будет замедляться до тех пор, пока не окажется вблизи пересечения, и, вследствие этого, что скорость въезда на пересечение будет высокой. С другой стороны, когда стоп-линия на полосе движения транспортного средства накрестлежащей стороны располагается далеко от пересечения в позиции, которая не может быть видна из базового транспортного средства, то может быть определено, что точка, с которой другое транспортное средство начинает замедляться находится на ранней стадии, и, вследствие этого, что скорость въезда на перекресток будет низкой. Кроме того, когда линии разметки, такие как боковые полосы, проходят вдоль обеих сторон полосы LD1 движения на стороне базового транспортного средства, которая является приоритетной полосой движения, и проходят, не прерываясь, вдоль части, соответствующей полосе LD2 движения накрестлежащей стороны, например, то транспортное средство накрестлежащей стороны более вероятно замедлится. Следовательно, блок 22 установки информации о движущемся теле может устанавливать информацию о движущемся теле на основании периферийной среды, оказывающей влияние на поведение другого транспортного средства. Учитывая периферийную среду мертвой зоны подобным образом, устройство 1 помощи при вождении может обеспечивать помощь при вождении более точно приведенную в соответствие с ощущениями водителя.
Блок 22 установки информации о движущемся теле также может устанавливать информацию о движущемся теле на основании информации о дорожном движении, полученной блоком 26 получения информации о дорожном движении. Например, на пересечении, где средняя интенсивность движения, количество и частота прошлых аварий, и т.п. дороги накрестлежащей стороны высокое, требуется особое внимание, и, вследствие этого, информация о движущемся теле должна устанавливаться строго. Кроме того, на пересечении, где количество пешеходов и т.п. высокое, более вероятно то, что скорость транспортного средства накрестлежащей стороны снижается. Блок 22 установки информации о движущемся теле может устанавливать информацию о движущемся теле, принимая во внимание эффекты, вызываемые данным типом информации о дорожном движении. Принимая во внимание информацию о дорожном движении, которая не может быть просто извлечена из информации, которая относится к периферии мертвой зоны, подобным образом, устройство 1 помощи при вождении может обеспечивать эффективную помощь при вождении, при которой может быть надежно обеспечена безопасность.
Блок 22 установки информации о движущемся теле также может устанавливать информацию о движущемся теле на основании информации об опыте, полученной блоком 27 получения информации об опыте. Например, когда водитель DP пересекал зависимое пересечение несколько раз и нечасто в прошлом, то информация о движущемся теле устанавливается строго, чтобы заставить водителя DP обратить внимание. Информация о движущемся теле также строго устанавливается, когда с момента предыдущего пересечения прошло длительное время. Блок 22 установки информации о движущемся теле может устанавливать информацию о движущемся теле, принимая во внимание эффекты, вызываемые данным типом информации об опыте. Используя информацию, указывающую прошлый опыт водителя, подобным образом, устройство 1 помощи при вождении может обеспечивать помощь при вождении, приведенную в соответствие с опытом водителя.
Информация о движущемся теле также может быть установлена на основании информации об объекте, полученной блоком 28 получения информации об объекте. Например, когда объект, такой как предшествующее транспортное средство, приближающееся транспортное средство, пешеход, мотоцикл, или велосипед, достигает (или прогнозируется, что достигает) точки входа в мертвую зону за предварительно определенное время до базового транспортного средства SM, то это означает, что транспортное средство накрестлежащей стороны будет замедляться. Блок 22 установки информации о движущемся теле может устанавливать информацию о движущемся теле, принимая во внимание поведение периферийного объекта. Поведение объектов на периферии базового транспортного средства также оказывает влияние на скорость и т.п. движущегося тела, которое выскакивает, и, вследствие этого, учитывая данную информацию, устройство 1 помощи при вождении может обеспечивать помощь при вождении более подходящую к ситуации.
Далее, блок 23 вычисления области скорости вычисляет зону опасности на основании информации о движущемся объекте, установленной на этапе S110 (этап S120). Блок 23 вычисления области скорости вычисляет зону опасности посредством вычисления условий, при которых базовое транспортное средство может пересечь пересечение без столкновения с движущимся телом, которое выскакивает из мертвой зоны. В частности, блок 23 вычисления области скорости вычисляет «Условие A: Условие, при котором базовое транспортное средство SM может пересечь первым, когда другое транспортное средство RM выскакивает из мертвой зоны DE1 правой стороны», «Условие B: Условие, при котором другое транспортное средство RM может пересечь первым, когда другое транспортное средство RM выскакивает из мертвой зоны DE1 правой стороны», «Условие C: Условие, при котором базовое транспортное средство SM может пересечь первым, когда другое транспортное средство LM выскакивает из мертвой зоны DE2 левой стороны» и «Условие D: Условие, при котором другое транспортное средство LM может пересечь первым, когда другое транспортное средство LM выскакивает из мертвой зоны DE2 левой стороны». Здесь, скорость V базового транспортного средства SM и расстояние L базового транспортного средства SM до точки входа в мертвую зону, которые указаны соответственно на ординате и абсциссе системы координат на Фиг. 8, являются переменными. В нижеследующем описании предполагается, что базовое транспортное средство SM движется прямолинейно с фиксированной скоростью V, другое транспортное средство RM движется прямолинейно с фиксированной предполагаемой скоростью VR, и их скорости и поперечные позиции не меняются посередине. Кроме того, в нижеследующем описании, определения «передний», «задний», «правый», и «левый» основываются на направлениях продвижения соответствующих транспортных средств.
(Условие A)
Фиг. 4 является схемой модели, используемой для вычисления Условия A. Точка PA, в которой часть правого переднего угла другого транспортного средства RM и часть правого заднего угла базового транспортного средства SM перекрываются, показана на Фиг. 4A. Позиция базового транспортного средства SM и позиция другого транспортного средства RM в данный момент обозначаются соответственно как SMA и RMA. На Фиг. 4A, расстояние, при котором базовое транспортное средство SM перемещается в позицию SMA, составляет (L+WR+BR/2+A). Расстояние, при котором другое транспортное средство RM перемещается в позицию RMA, при этом, обозначается как LR.
Здесь, расстояние LR является нераспознаваемой величиной. Тем не менее, прямоугольный треугольник, нарисованный на основании позиционной зависимости между водителем DP и углом P1 и прямоугольный треугольник, нарисованный на основании позиционной зависимости между водителем DP и позицией P3 угла, имеют гомологичную зависимость, и, вследствие этого, зависимость, показанная в Уравнении (1A), создается из размерной зависимости, показанной на Фиг. 4B. Посредством расширения Уравнения (1A) до Уравнения (2A), расстояние LR выражается посредством Уравнения (3A). Когда время, которое требуется другому транспортному средству RM для достижения позиции RMA, устанавливается как tR_A, то время tR_A выражается, как показано в Уравнении (4A), используя расстояние LR. Здесь, в соответствии с Условием A, расстояние перемещения базового транспортного средства SM должно быть равно, либо больше расстояния перемещения, которое требуется для достижения позиции SMA в момент времени, когда другое транспортное средство RM достигает позиции RMA (т.е. по истечению времени tR_A). Другими словами, скорость V базового транспортного средства SM должна быть равна либо больше скорости, которая требуется базовому транспортному средству SM для достижения позиции SMA после истечения времени tR_A. Следовательно, когда скорость, которая требуется для удовлетворения Условия A, устанавливается как VA, то скорость VA выражается, как показано в Уравнении (5A).
LR+(B/2-BD):W2-BD=L+AD+WR+BR/2:L+AD (1A)
(LR+B/2-BD)(L+AD)=(W2-BD )(L+AD+WR+BR/2) (2A)
LR={(W2-BD)(L+AD+WR+BR/2)-(B/2-BD)(L+AD)}/(L+AD) (3A)
tR_A=LR/VR (4A)
VA≥(A+L+WR+BR/2)/tR_A (5A)
Блок 23 вычисления области скорости указывает область, в которой удовлетворяется Условие A в системе координат, показанной на Фиг. 8. В частности, блок 23 вычисления области скорости рисует график A, показывающий min(VA), используя Уравнения (3A), (4A), и (5A). Затем блок 23 вычисления области скорости устанавливает область скорости на уровне или выше min(VA) в качестве области, в которой удовлетворяется Условие A.
(Условие B)
Фиг. 5 является схемой модели, используемой для вычисления Условия B. Точка PB, в которой часть левого заднего угла другого транспортного средства RM и часть левого переднего угла базового транспортного средства SM перекрываются, показывается на Фиг. 5A. Позиция базового транспортного средства SM и позиция другого транспортного средства RM в данный момент обозначаются соответственно как SMB и RMB. На Фиг. 5A, расстояние, при котором базовое транспортное средство SM перемещается в позицию SMB, составляет (L+WR-BR/2). Расстояние, при котором другое транспортное средство RM перемещается в позицию RMB, при этом, обозначается как LR.
Здесь, расстояние LR является нераспознаваемой величиной. Тем не менее, прямоугольный треугольник, нарисованный на основании позиционной зависимости между водителем DP и углом P1, и прямоугольный треугольник, нарисованный на основании позиционной зависимости между водителем DP и позицией P3 угла, имеют гомологичную зависимость, и, вследствие этого, зависимость, показанная в Уравнении (1B), создается из размерной зависимости, показанной на Фиг. 5B. Посредством расширения Уравнения (1B) до Уравнения (2B), расстояние LR выражается посредством Уравнения (3B). Когда время, которое требуется другому транспортному средству RM для достижения позиции RMB, устанавливается как tR_B, то время tR_B выражается, как показано в Уравнении (4B), используя расстояние LR. Здесь, в соответствии с Условием B, расстояние перемещения базового транспортного средства SM должно быть равно, либо меньше расстояния перемещения, которое требуется для достижения позиции SMB в момент времени, когда другое транспортное средство RM достигает позиции RMB (т.е. по истечению времени tR_B). Другими словами, скорость V базового транспортного средства SM должна быть равна либо меньше скорости, которая требуется базовому транспортному средству SM для достижения позиции SMB после истечения времени tR_B. Следовательно, когда скорость, которая требуется для удовлетворения Условия B, устанавливается как VB, то скорость VB выражается, как показано в Уравнении (5B).
LR+(AR+B/2+BD):W2-BD=L+AD+WR+BR/2:L+AD (1B)
{LR-(AR+B/2+BD)}(L+AD)=(W2-BD)(L+AD+WR+BR/2) (2B)
LR={(W2-BD)(L+AD+WR+BR/2)+(AR+B/2+BD)(L+AD)}/(L+AD) (3B)
tR_B=LR/VR (4B)
VB≤(L+WR-BR/2)/tR_B (5B)
Блок 23 вычисления области скорости указывает область, в которой удовлетворяется Условие B в системе координат, показанной на Фиг. 8. В частности, блок 23 вычисления области скорости рисует график B, показывающий max(VB), используя Уравнения (3B), (4B), и (5B). Затем блок 23 вычисления области скорости устанавливает область скорости на уровне или ниже max(VB) в качестве области, в которой удовлетворяется Условие B.
(Условие C)
Фиг. 6 является схемой модели, используемой для вычисления Условия C. Точка PC, в которой часть левого переднего угла другого транспортного средства LM и часть левого заднего угла базового транспортного средства SM перекрываются, показывается на Фиг. 6A. Позиция базового транспортного средства SM и позиция другого транспортного средства LM в данный момент обозначаются соответственно как SMC и LMC. На Фиг. 6A, расстояние, при котором базовое транспортное средство SM перемещается в позицию SMC, составляет (L+WL+BL/2+A). Расстояние, при котором другое транспортное средство LM перемещается в позицию LMC, при этом, обозначается как LL.
Здесь, расстояние LL является нераспознаваемой величиной. Тем не менее, прямоугольный треугольник, нарисованный на основании позиционной зависимости между водителем DP и углом P2, и прямоугольный треугольник, нарисованный на основании позиционной зависимости между водителем DP и позицией P4 угла, имеют гомологичную зависимость, и, вследствие этого, зависимость, показанная в Уравнении (1C), создается из размерной зависимости, показанной на Фиг. 6B. Посредством расширения Уравнения (1C) до Уравнения (2C), расстояние LL выражается посредством Уравнения (3C). Когда время, которое требуется другому транспортному средству LM для достижения позиции LMC, устанавливается как tL_C, то время tL_C выражается, как показано в Уравнении (4C), используя расстояние LL. Здесь, в соответствии с Условием C, расстояние перемещения базового транспортного средства SM должно быть равно, либо больше расстояния перемещения, которое требуется для достижения позиции SMC в момент времени, когда другое транспортное средство LM достигает позиции LMC (т.е. по истечению времени tL_C). Другими словами, скорость V базового транспортного средства SM должна быть равна либо выше скорости, которая требуется базовому транспортному средству SM для достижения позиции SMC после истечения времени tL_C. Следовательно, когда скорость, которая требуется для удовлетворения Условия C, устанавливается как VC, то скорость VC выражается, как показано в Уравнении (5C).
LL+B/2+BD:W1-BD=L+AD+WL+BL/2:L+AD (1C)
(LL+B/2+BD)(L+AD)=(W1+BD)(L+AD+WL+BL/2) (2C)
LL={(W1+BD)(L+AD+WL+BL/2)-(B/2+BD)(L+AD)}/(L+AD) (3C)
tL_C=LL/VL (4C)
VC≥(A+L+WL+BL/2)/tL_C (5C)
Блок 23 вычисления области скорости указывает область, в которой удовлетворяется Условие C в системе координат, показанной на Фиг. 8. В частности, блок 23 вычисления области скорости рисует график C, показывающий min(VC), используя Уравнения (3C), (4C), и (5C). Затем блок 23 вычисления области скорости устанавливает область скорости на уровне или выше min(VC) в качестве области, в которой удовлетворяется Условие C.
(Условие D)
Фиг. 7 является схемой модели, используемой для вычисления Условия D. Точка PDC, в которой часть правого заднего угла другого транспортного средства LM и часть правого переднего угла базового транспортного средства SM перекрываются, показывается на Фиг. 7A. Позиция базового транспортного средства SM и позиция другого транспортного средства LM в данный момент обозначаются соответственно как SMD и LMD. На Фиг. 7A, расстояние, при котором базовое транспортное средство SM перемещается в позицию SMD, составляет (L+WL-BL/2). Расстояние, при котором другое транспортное средство LM перемещается в позицию LMD, при этом, обозначается как LL.
Здесь, расстояние LL является нераспознаваемой величиной. Тем не менее, прямоугольный треугольник, нарисованный на основании позиционной зависимости между водителем DP и углом P2, и прямоугольный треугольник, нарисованный на основании позиционной зависимости между водителем DP и позицией P4 угла, имеют гомологичную зависимость, и, вследствие этого, зависимость, показанная в Уравнении (1D), создается из размерной зависимости, показанной на Фиг. 7B. Посредством расширения Уравнения (1D) до Уравнения (2D), расстояние LL выражается посредством Уравнения (3D). Когда время, которое требуется другому транспортному средству LM для достижения позиции LMD, устанавливается как tL_D, то время tL_D выражается, как показано в Уравнении (4D), используя расстояние LL. Здесь, в соответствии с Условием D, расстояние перемещения базового транспортного средства SM должно быть равно, либо меньше расстояния перемещения, которое требуется для достижения позиции SMD в момент времени, когда другое транспортное средство LM достигает позиции LMD (т.е. по истечению времени tL_D). Другими словами, скорость V базового транспортного средства SM должна быть равна либо ниже скорости, которая требуется базовому транспортному средству SM для достижения позиции SMD после истечения времени tL_D. Следовательно, когда скорость, которая требуется для удовлетворения Условия D, устанавливается как VD, то скорость VD выражается, как показано в Уравнении (5D).
LL-(AL+B/2-BD):W2+BD=L+AD+WL+BL/2:L+AD (1D)
{LL-(AL+B/2-BD)}(L+AD)=(W1+BD)(L+AD+WL+BL/2) (2D)
LL={(W1+BD)(L+AD+WL+BL/2)+(AL+B/2-BD)(L+AD)}/(L+AD) (3D)
tL_D=LL/VL (4D)
VD≤(L+WL-BL/2)/tL_D (5D)
Блок 23 вычисления области скорости указывает область, в которой удовлетворяется Условие D в системе координат, показанной на Фиг. 8. В частности, блок 23 вычисления области скорости рисует график D, показывающий max (VD), используя Уравнения (3D), (4D), и (5D). Затем блок 23 вычисления области скорости устанавливает область скорости на уровне или ниже max(VD) в качестве области, в которой удовлетворяется Условие D.
Как показано на Фиг. 8, на основании вышеприведенных вычислений, блок 23 вычисления области скорости устанавливает область скорости, в которой max(VB, VD)<V<min(VA, VC) в качестве зоны DZ опасности. Следует отметить, что при фактических вычислениях, графики с A по D принимают форму кривых, однако, чтобы способствовать пониманию, графики с A по D, схематично показанные на Фиг. 8, изображены в качестве прямых линий.
Теперь будет описана зона DZ опасности. Предполагается, что когда базовое транспортное средство SM достигает позиции предварительно определенного расстояния L, то скорость V базового транспортного средства SM находится в зоне DZ опасности. Когда, при данном условии, другие транспортные средства RM, LM выскакивают из соответствующих мертвых зон DE1, 2 в следующий момент, в то время как базовое транспортное средство SM движется со скоростью V и продолжает двигаться с фиксированной скоростью и в фиксированной поперечной позиции, то базовое транспортное средство SM может войти в контакт с другими транспортными средствами RM, LM. Если выскакивают другие транспортные средства RM, LM, то базовое транспортное средством SM должно выполнить экстренное торможение или экстренное управление направлением движения. Другими словами, если другие транспортные средства RM, LM выскакивают из мертвых зон DE1, 2 в следующий момент, когда условие скорости базового транспортного средства SM находится в зоне DZ опасности, то возникает вероятность столкновения. Следовательно, базовое транспортное средство SM предпочтительно должно двигаться таким образом, чтобы избежать зоны DZ опасности.
В частности, как показано на Фиг. 8, будут описаны случаи, при которых скорость базового транспортного средства равна V1, V2, и V3 в момент времени, когда достигается расстояние LS. Скорость V1 выше min(VA, VC), и, вследствие этого, даже если другие транспортные средства RM, LM выскакивают в следующий момент, то базовое транспортное средство SM может пересечь пересечение перед другими транспортными средствами. Скорость V2 находится в зоне DZ опасности, и, вследствие этого, если другие транспортные средства RM, LM выскакивают в следующий момент (и не выполняется ни экстренного торможения, ни экстренного управления направлением движения), то базовое транспортное средство SM может войти в контакт с другими транспортными средствами RM, LM. Скорость V3 ниже max(VB, VD), и, вследствие этого, даже если другие транспортные средства RM, LM выскакивают в следующий момент, то базовое транспортное средство SM может пересечь пересечение после других транспортных средств. Тем не менее, если базовое транспортное средство продолжает двигаться со скоростью V3 так, чтобы достичь точки входа в мертвую зону (т.е., когда L достигает 0), то скорость V3 входит в зону DZ опасности.
Далее, блок 25 вычисления целевой поперечной позиции вычисляет целевую поперечную позицию базового транспортного средства SM на основании зоны DZ опасности, вычисленной на этапе S120 (этап S130). Как показано на Фиг. 9, дорога имеет постоянную ширину, и, вследствие этого, боковой интервал W1 слева и боковой интервал W2 справа отличаются в зависимости от поперечной позиции базового транспортного средства SM. Например, когда боковой интервал W1 слева небольшой, мертвая зона DE2 левой стороны увеличивается, а когда боковой интервал W2 справа небольшой, тогда увеличивается мертвая зона DE1 правой стороны. Другими словами, поперечная позиция базового транспортного средства SM оказывает влияние на безопасность. На этапе S130, блок 25 вычисления целевой поперечной позиции вычисляет целевой боковой интервал W1целевой, при котором может быть улучшена безопасность. Целевой боковой интервал W1целевой служит в качестве целевой поперечной позиции базового транспортного средства SM в точке входа в мертвую зону (L=0).
При обработке этапа S130, блок 23 вычисления области скорости вычисляет зону DZ опасности заранее относительно нескольких шаблонов бокового интервала (W1, W2) и сохраняет результаты вычисления в форме карты. Следует отметить, что блок 23 вычисления области скорости выполнен с возможностью указания мертвых зон DE1, 2 посредством вычисления даже при отличном условии позиции к фактической позиции базового транспортного средства SM в момент вычисления, и, вследствие этого, блок 23 вычисления области скорости может вычислить зону DZ опасности относительно нескольких шаблонов бокового интервала (W1, W2).
Фиг. 10 показывает пример карты. На карте, скорости в точке входа в мертвую зону (L=0) извлечены из зоны DZ опасности и связаны с соответствующими шаблонами бокового интервала (W1, W2). A на карте обозначает зависимость между min(VA) при L=0 и боковыми интервалами (W1, W2). B на карте обозначает зависимость между max(VB) при L=0 и боковыми интервалами (W1, W2). C на карте обозначает зависимость между min(VC) при L=0 и боковыми интервалами (W1, W2). D на карте обозначает зависимость между max(VD) при L=0 и боковыми интервалами (W1, W2). Когда поперечная позиция является левой от центра (когда W1 небольшой), то сложно увидеть другое транспортное средство LM, приближающееся с левой стороны, и, вследствие этого, увеличивается min(Vc). Когда поперечная позиция является правой от центра (когда W2 небольшой), то сложно увидеть другое транспортное средство RM, приближающееся с правой стороны, и, вследствие этого, увеличивается min(VA). Меньшее из max(VB) и max(VD) устанавливается на карте заранее в качестве значения нижнего предела зоны опасности (максимальное значение меньшей скорости, чем зона опасности). На Фиг. 10, max(VB) установлена в качестве значения нижнего предела не обращая внимания на боковые интервалы. Большее из min(VA) и min(VC) устанавливается на карте заранее в качестве значения верхнего предела зоны опасности (минимальное значения большей скорости, чем зона опасности). На Фиг. 10, min(VC) установлена в качестве значения верхнего предела в области слева от центра и min(VA) установлена в качестве значения верхнего предела в области справа от центра, используя в качестве границы интервалы (W1, W2)=(4,5, 1,5).
Блок 25 вычисления целевой поперечной позиции устанавливает оптимальную целевую поперечную позицию на основании карты такой, как показанная на Фиг. 10. Например, блок 25 вычисления целевой поперечной позиции устанавливает боковые интервалы, при которых значение нижнего предела зоны опасности находится в максимальном значении, в качестве целевого бокового интервала W1целевой. В примере Фиг. 10, max(VB) достигает максимального значения при боковых интервалах (W1, W2)=(4,5, 1,5). Кроме того, блок 25 вычисления целевой поперечной позиции устанавливает боковые интервалы, при которых разность между значением нижнего предела и значением верхнего предела находится на минимальном значении, в качестве целевого бокового интервала W1целевой. В примере Фиг. 10, разность между значением верхнего предела и значением нижнего предела находится на минимальном значении при боковых интервалах (W1, W2)=(2,5, 3,5), соответствующих позиции, при которой пересекаются min(VA) и min(VC).
Далее, блок 24 вычисления целевой скорости вычисляет целевую скорость Vцелевая базового транспортного средства SM на основании зоны DZ опасности, вычисленной на этапе S120 (этап S140). Блок 24 вычисления целевой скорости устанавливает скорость, при которой можно избежать зоны DZ опасности, не обращая внимания на расстояние L, в качестве целевой скорости Vцелевая. Здесь, блок 24 вычисления целевой скорости устанавливает значение нижнего предела зоны опасности (максимальное значение меньшей скорости, чем зона опасности), или, другими словами, меньшее из значений max(VB) и max(VD) при L=0, в качестве Vцелевая. На Фиг. 8, max(VB) при L=0 устанавливается в качестве значения нижнего предела, и, вследствие этого, max(VB) при L=0 устанавливается в качестве Vцелевая. При этом, любое значение, которое ниже диапазона скорости зоны DZ опасности при L=0 может быть установлено в качестве целевой скорости Vцелевая, и, вследствие этого, может быть установлено значение ниже max(VB). Следует отметить, что когда на этапе S130 была установлена целевая поперечная позиция, блок 24 вычисления целевой скорости вычисляет целевую скорость Vцелевая, используя зону DZ опасности, соответствующую целевой поперечной позиции.
Далее, блок 31 управления помощью при вождении определяет, требуется или нет помощь при вождении, на основании целевой поперечной позиции, вычисленной на этапе S130, целевой скорости, вычисленной на этапе S140, и фактической поперечной позиции и скорости базового транспортного средства SM (этап S150). В частности, блок 31 управления помощью при вождении определяет, отличается или нет текущий боковой интервал W1сейчас базового транспортного средства SM от целевого бокового интервала W1целевой (является или нет разность между ними больше предварительно определенного порогового значения). Когда определяется, что текущий боковой интервал W1сейчас идентичен целевому боковому интервалу W1целевой, то блок 31 управления помощью при вождении определяет, что помощь при вождении в отношении регулировки поперечной позиции не требуется, а когда определяется, что текущий боковой интервал W1сейчас и целевой боковой интервал W1целевой отличаются, блок 31 управления помощью при вождении определяет, что требуется помощь при вождении в отношении регулировки поперечной позиции. Блок 31 управления помощью при вождении также определяет, является или нет текущая скорость Vсейчас базового транспортного средства SM выше целевой скорости Vцелевая. Когда определяется, что скорость Vсейчас равна или ниже целевой скорости Vцелевая, то блок 31 управления помощью при вождении определяет, что помощь при вождении в отношении регулировки скорости не требуется, а когда определяется, что скорость Vсейчас выше целевой скорости Vцелевая, то блок 31 управления помощью при вождении определяет, что требуется помощь при вождении в отношении регулировки скорости. Когда на этапе S150 определяется, что не требуется никакой тип помощи при вождении, обработка управления, показанная на Фиг. 3, прекращается. С другой стороны, когда определяется, что требуется, по меньшей мере, один тип обработки, то обработка переходит к этапу S160. Например, скорость Vсейчас, показанная на Фиг. 8, входит в зону DZ опасности, когда базовое транспортное средство SM достигает точки входа в мертвую зону, и, вследствие этого, требуется помощь при вождении.
Блок 31 управления помощью при вождении выполняет помощь при вождении для перемещения базового транспортного средства SM в целевую поперечную позицию и помощь при вождении, для установки скорости базового транспортного средства SM равной целевой скорости на основании результатов определения, полученных на этапе S150 (этап S160). Например, блок 31 управления помощью при вождении может принудительно замедлить базовое транспортное средство SM до целевой скорости Vцелевая посредством управления блоком 11 помощи при движении. Следует отметить, что при этом, как показано на Фиг. 8, курс замедления предпочтительно устанавливается таким образом, что избегают зоны DZ опасности, даже при переключении со скорости Vсейчас на целевую скорость Vцелевая. В качестве альтернативы, блок 31 управления помощью при вождении может выдавать инструкцию водителю в отношении замедления до целевой скорости Vцелевая, используя блок 8 отображения и блок 9 формирования звука. Блок 31 управления помощью при вождении может принудительно перемещать базовое транспортное средство SM в целевой боковой интервал W1целевой посредством управления блоком 11 помощи при движении. В качестве альтернативы, блок 31 управления помощью при вождении может выдавать инструкцию водителю DP в отношении перемещения в целевой боковой интервал W1целевой, используя блок 8 отображения и блок 9 формирования звука. Следует отметить, что любой из видов помощи: принудительная помощь при вождении и помощь при вождении посредством инструкции, может быть выполнен отдельно в качестве помощи при вождении, которая относится к скорости и поперечной позиции, или оба вида могут быть выполнены одновременно. Кроме того, любой один из видов помощи при вождении: помощь при вождении для реализации целевой скорости Vцелевая и помощь при вождении для реализации целевого бокового интервала W1целевой, может быть выполнен отдельно, или могут быть выполнены оба, либо в разные моменты времени, либо одновременно.
Когда мертвая зона присутствует в нескольких направлениях, как в данном варианте осуществления, блок 31 управления помощью при движении может определять опасное направление, по которому присутствует большая опасность, на основании зоны DZ опасности. Как показано на графике на Фиг. 8, например, значение нижнего предела зоны DZ опасности определяется посредством min(VB), соответствующей условию правой стороны. Вследствие этого очевидно, что транспортное средство, выскакивающее с правой стороны, представляет собой больший риск, чем транспортное средство, выскакивающее с левой стороны. Кроме того, в зависимости от формы пересечения и способа, которым базовое транспортное средство SM въезжает на пересечение, транспортное средство, выскакивающее с левой стороны, может представлять собой больший риск. Следовательно, блок 31 управления помощью при вождении может определять опасное направление, по которому присутствует большая опасность, и выдавать предупреждение, которое заставляет водителя DP посмотреть в опасном направлении. Например, блок 31 управления помощью при вождении может увеличить громкость звука предупреждения с правой стороны, увеличить размер отображения с правой стороны блока 8 отображения, или изменить цвет отображения с правой стороны на цвет предупреждения.
Блок 31 управления помощью при вождении также может принимать во внимание направление взгляда водителя DP. Блок 31 управления помощью при вождении получает результат обнаружения от блока 29 обнаружения направления взгляда, и определяет, совпадает или нет направление взгляда водителя с вычисленным опасным направлением. На основании результата определения, блок 31 управления помощью при вождении может уменьшить помощь при вождении, когда водитель смотрит в направлении опасного направления, и усилить помощь при вождении, когда водитель не смотрит в опасном направлении. Например, блок 31 управления помощью при вождении выполняет управление таким образом, который показан на Фиг. 12. Усиление помощи при вождении означает увеличение силы торможения или перемещение на более ранний срок момента начала помощи при вождении, например.
Когда завершена обработка этапа S160, обработка управления, показанная на Фиг. 3, прекращается, вследствие чего обработка возобновляется с этапа S100.
Далее, будут описаны действия и эффекты устройства 1 помощи при вождении в соответствии с данным вариантом осуществления.
В устройстве 1 помощи при вождении в соответствии с данным вариантом осуществления, блок 22 установки информации о движущемся теле прогнозирует движущееся тело, которое может выскочить из мертвой зоны, и устанавливает информацию о движущемся теле, которая относится к движущемуся телу. Кроме того, блок 23 вычисления области скорости может вычислить скорость движения базового транспортного средства, при которой базовое транспортное средство может войти в контакт с движущимся телом на основании предполагаемой скорости движущегося теля, в отношении которого прогнозируется, что оно выскочит из мертвой зоны. Затем блок 23 вычисления области скорости может вычислить область скорости (зону DZ опасности), в которой может произойти контакт с движущимся телом. Блок 24 вычисления целевой скорости вычисляет целевую скорость на основании вычисленной области скорости. Следовательно, устройство 1 помощи при вождении, вместо сравнения предполагаемого движущегося тела с предполагаемым курсом базового транспортного средства SM, вычисляет область скорости, в которой может произойти контакт с движущимся телом, и затем вычисляет целевую скорость на основании данного вычисления. Посредством этого, устройство 1 помощи при вождении может выполнять управление на основании конкретной целевой скорости, с которой должно двигаться базовое транспортное средство SM, и, вследствие этого, может обеспечивать помощь при вождении таким образом, что обеспечивается высокая степень безопасности. Кроме того, помощь при вождении, обеспечиваемая устройством 1 помощи при вождении, не подвержена влиянию точности, с которой прогнозируется путь базового транспортного средства, и, вследствие этого, может быть обеспечена должная помощь при вождении. В результате, устройство 1 помощи при вождении выполнено с возможностью обеспечения должной помощи при вождении, при которой может быть надежно обеспечена безопасность.
Кроме того, вместо обеспечения помощи при вождении после обнаружения движущегося тела, фактически выскакивающего из мертвой зоны, устройство помощи при вождении может обеспечивать помощь при вождении посредством прогнозирования движущегося тела (и его предполагаемой скорости) заранее, не обращая внимания на то, выскакивает или нет фактически движущееся тело. Устройство 1 помощи при вождении может вычислять целевую скорость после прогнозирования предполагаемой опасности, когда мертвая зона пересекает пересечение, и посредством этого может обеспечивать помощь при вождении, при которой надежно обеспечивается безопасность, даже когда движущееся тело фактически выскакивает из мертвой зоны.
Устройство 1 помощи при вождении включает в себя блок 25 вычисления целевой поперечной позиции, который вычисляет целевую поперечную позицию базового транспортного средства SM на основании области скорости, вычисленной блоком 23 вычисления области скорости. Размер мертвой зоны меняется в зависимости от поперечной позиции базового транспортного средства SM, что приводит к изменению в опасности контакта с движущимся телом. Следовательно, посредством вычисления блоком 25 вычисления целевой поперечной позиции целевой поперечной позиции, устройство 1 помощи при вождении может обеспечивать должную помощь при вождении таким образом, что базовое транспортное средство SM движется в безопасной поперечной позиции.
В устройстве 1 помощи при вождении, блок 22 установки информации о движущемся теле может устанавливать информацию о движущемся теле на основании форм дорог, составляющих мертвую зону. На поведение движущегося тела, которое может выскочить из мертвой зоны, оказывает влияние форма дороги, и, вследствие этого, принимая во внимание форму дороги, устройство 1 помощи при вождении может обеспечивать помощь при вождении с более высокой степенью точности.
В устройстве 1 помощи при вождении, блок 22 установки информации о движущемся теле может устанавливать информацию о движущемся теле на основании соотношения между шириной полосы движения стороны движущегося тела и шириной полосы движения стороны базового транспортного средства. Учитывая соотношение между соответствующими ширинами полосы движения подобным образом, устройство 1 помощи при вождении может обеспечивать помощь при вождении более точно приведенную в соответствие с ощущениями водителя и фактической скоростью, с которой выскакивает движущееся тело.
В устройстве 1 помощи при вождении, блок 22 установки информации о движущемся теле может устанавливать информацию о движущемся теле на основании периферийной среды мертвой зоны. Принимая во вниманию периферийную среду мертвой зоны подобным образом, устройство 1 помощи при вождении может обеспечивать помощь при вождения более точно приведенную в соответствии с ощущениями водителя.
Устройство 1 помощи при вождении включает в себя блок 26 получения информации о дорожном движении, который получает информацию о дорожном движении, которая относится к дорогам, составляющим мертвую зону, и блок 22 установки информации о движущемся теле может устанавливать информацию о движущемся теле на основании информации о дорожном движении, полученной блоком 26 получения информации о дорожном движении. Принимая во внимания информацию о дорожном движении, которая не может быть просто извлечена из информации, которая относится к периферии мертвой зоны, подобным образом, устройство 1 помощи при вождении может обеспечивать эффективную помощь при вождении, при которой может быть надежно обеспечена безопасность, когда базовое транспортное средство движется вдоль дороги с чрезвычайно опасной мертвой зоной.
Устройство 1 помощи при вождении включает в себя блок 27 получения информации об опыте, который получает информацию об опыте, указывающую прошлый опыт водителя, и блок 22 установки информации о движущемся теле может устанавливать информацию о движущемся теле на основании информации об опыте, полученной блоком 27 получения информации об опыте. Используя информацию, указывающую прошлый опыт водителя подобным образом, устройство 1 помощи при вождении может обеспечивать помощь при вождении в соответствии с опытом водителя.
Устройство 1 помощи при вождении включает в себя блок 28 получения информации об объекте, который получает информацию об объекте, которая относится к поведению объектов, присутствующих в периферии базового транспортного средства, и блок 22 установки информации о движущемся теле может устанавливать информацию о движущемся теле на основании информации об объекте, полученной блоком 28 получения информации об объекте. Поведение объектов в периферии базового транспортного средства также оказывает влияние на скорость и т.д. движущегося объекта, который выскакивает, и, вследствие этого, учитывая данную информацию, устройство 1 помощи при вождении может обеспечивать помощь при вождении более подходящую к ситуации.
Устройство 1 помощи при вождении включает в себя блок 31 управления помощью при вождении, который выдает предупреждение, чтобы предупредить водителя о мертвой зоне. Когда мертвая зона присутствует в нескольких направлениях, блок 31 управления помощью при вождении может определять опасное направление, по которому присутствует большая опасность, на основании формы области скорости, вычисленной блоком 23 вычисления области скорости, и управлять выдачей предупреждения таким образом, что водитель смотрит в опасном направлении. Посредством этого, устройство 1 помощи при вождении может выдавать предупреждение, которое заставляет водителя посмотреть в опасном направлении, в котором присутствует большая опасность, и в результате, может быть улучшен эффект предвосхищения опасности.
Устройство 1 помощи при вождении включает в себя блок 29 обнаружения направления взгляда, который обнаруживает направление взгляда водителя, и блок 31 управления помощью при вождении может управлять выдачей предупреждения на основании опасного направления и направления взгляда. Посредством управления выдачей предупреждения, принимая во внимание направление взгляда водителя подобным образом, может быть уменьшена нагрузка на водителя, и в ситуации, когда помощь при вождении становится фактически необходимой, помощь при вождении может быть исполнена более эффективно.
Изобретение не ограничивается описанным выше вариантом осуществления.
Например, другое транспортное средство было приведено в качестве примера движущегося тела, однако движущимся телом может быть любой объект, который может выскочить из мертвой зоны, такой как двухколесное транспортное средство. Устанавливаемая информация о движущемся теле модифицируется в зависимости от типа движущегося тела.
Кроме того, в приведенном выше варианте осуществления, блок 22 установки информации о движущемся теле принимает во внимание различные элементы при установке информации о движущемся теле, однако блок 22 установки информации о движущемся теле не обязательно должен принимать во внимание все из этих элементов, и может рассматривать только часть или один из элементов.
Следует отметить, что в вышеприведенном варианте осуществления, только целевая скорость при L=0 устанавливается в качестве целевой скорости, однако могут быть установлены несколько целевых скоростей на пути к L=0. Например, целевая скорость может быть установлена через фиксированные интервалы от текущей позиции базового транспортного средства SM до точки входа в мертвую зону (L=0) (таким образом, что целевая скорость постепенно уменьшается в направлении точки входа в мертвую зону), и может быть вычислен профиль целевой скорости от текущей позиции до L=0.
В вышеприведенном варианте осуществления, зона DZ опасности устанавливается без обеспечения конкретного диапазона в отношении расстояния L базового транспортного средства до точки входа в мертвую зону. Тем не менее, вместо этого зона DZ опасности может быть ограничена фиксированным диапазоном таким как «0≤L≤X1», например. Кроме того, зона DZ опасности может быть установлена в отношении только предварительно определенного L, таким образом, что зона DZ опасности устанавливается только в части L=0 (другими словами, таким образом, что целевая скорость устанавливается на основании только области скорости при L=0), например.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Изобретение может быть использовано в качестве устройства помощи при вождении.
1 устройство помощи при вождении
21 блок распознавания мертвой зоны
22 блок установки информации о движущемся теле
23 блок вычисления области скорости
24 блок вычисления целевой скорости
25 блок вычисления целевой поперечной позиции
26 блок получения информации о дорожном движении
27 блок получения информации об объекте
29 блок обнаружения направления взгляда
31 блок управления помощью при вождении (блок управления выдачей предупреждения)
SM базовое транспортное средство
RM, LM другое транспортное средство (движущееся тело)
DP водитель
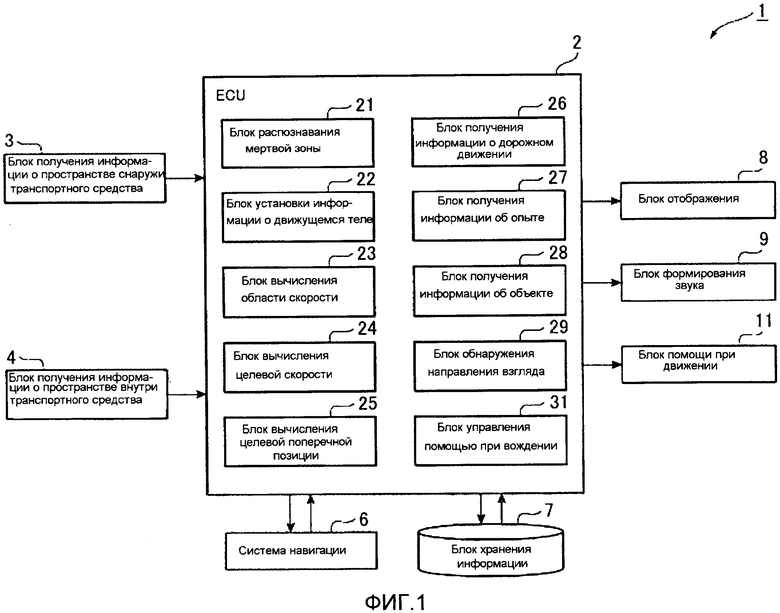
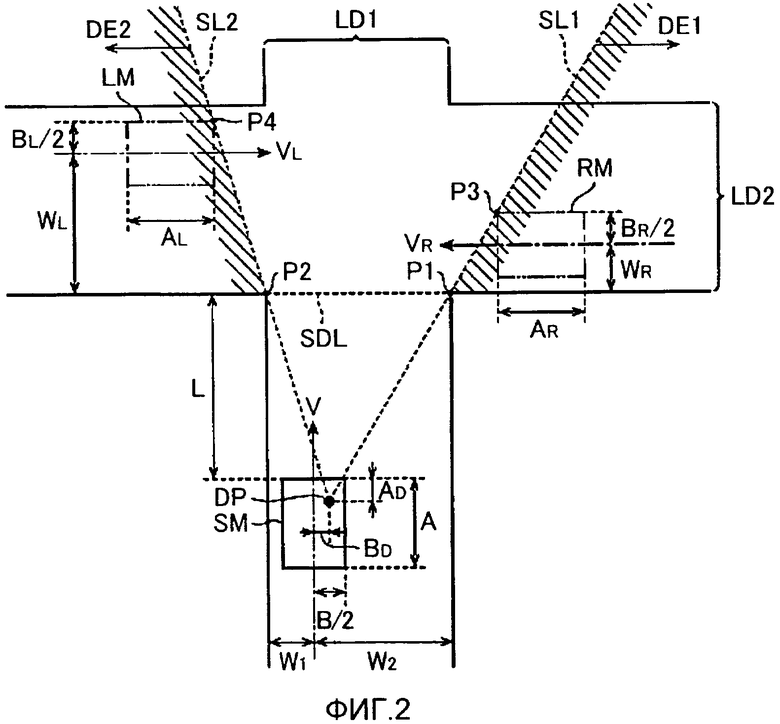
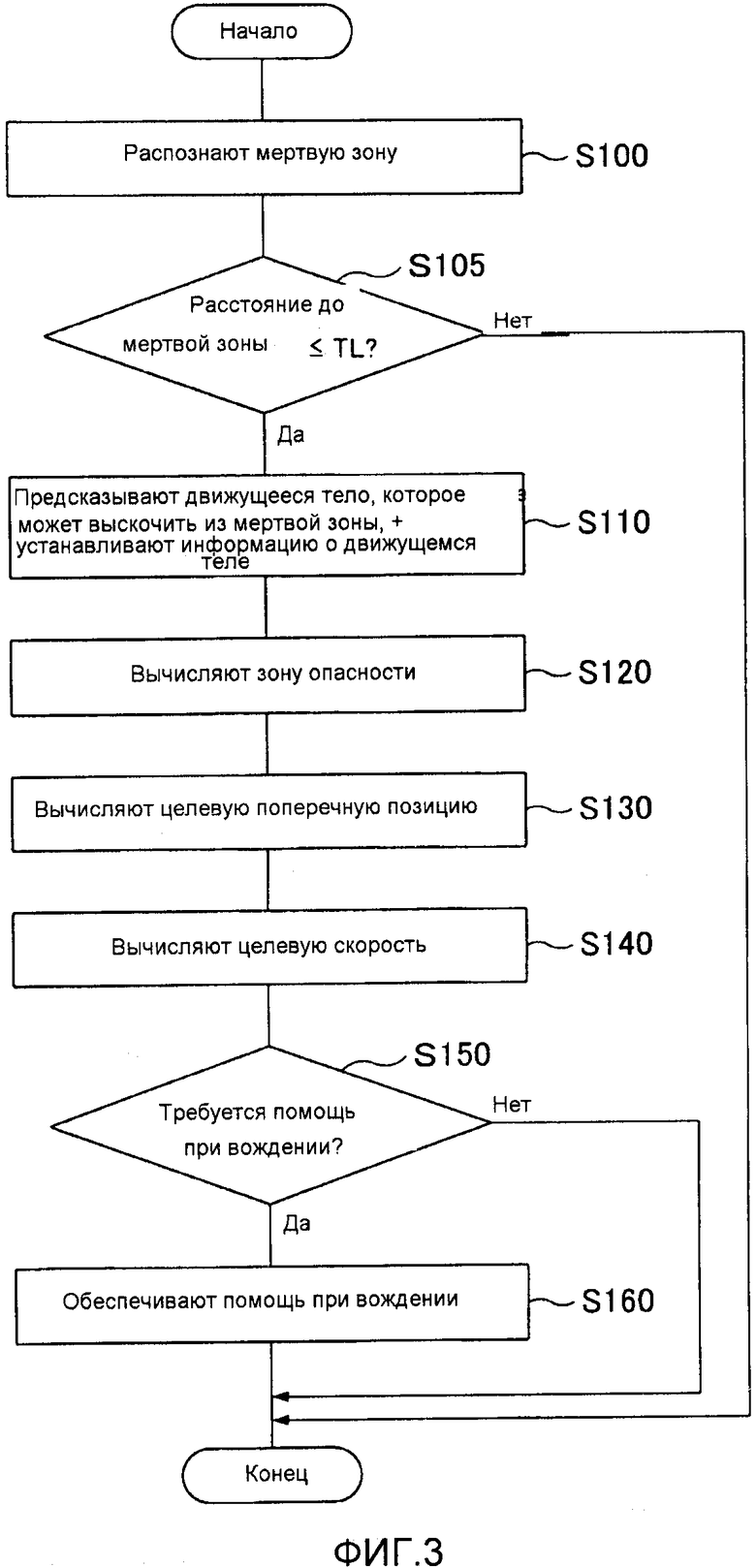
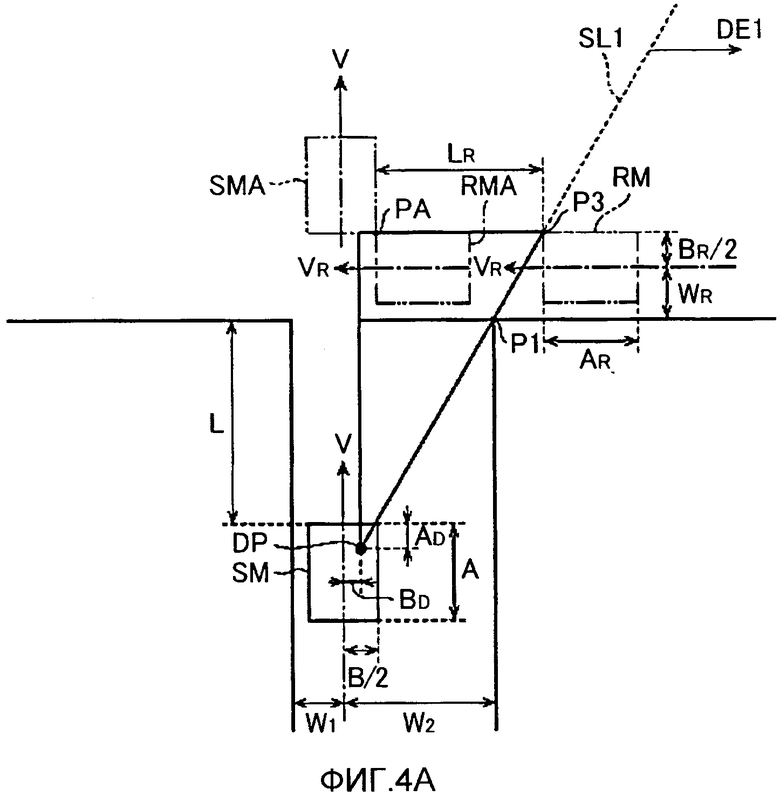
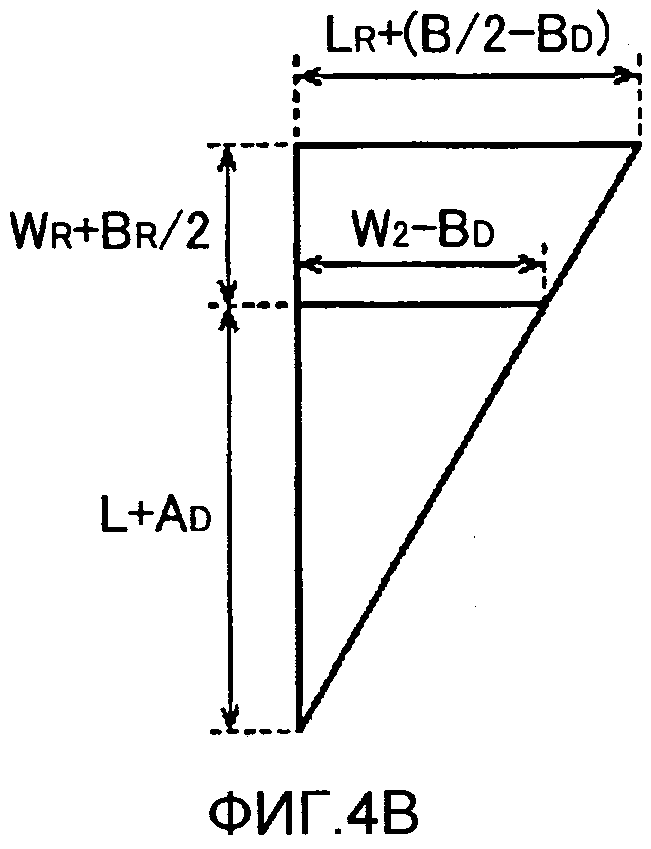
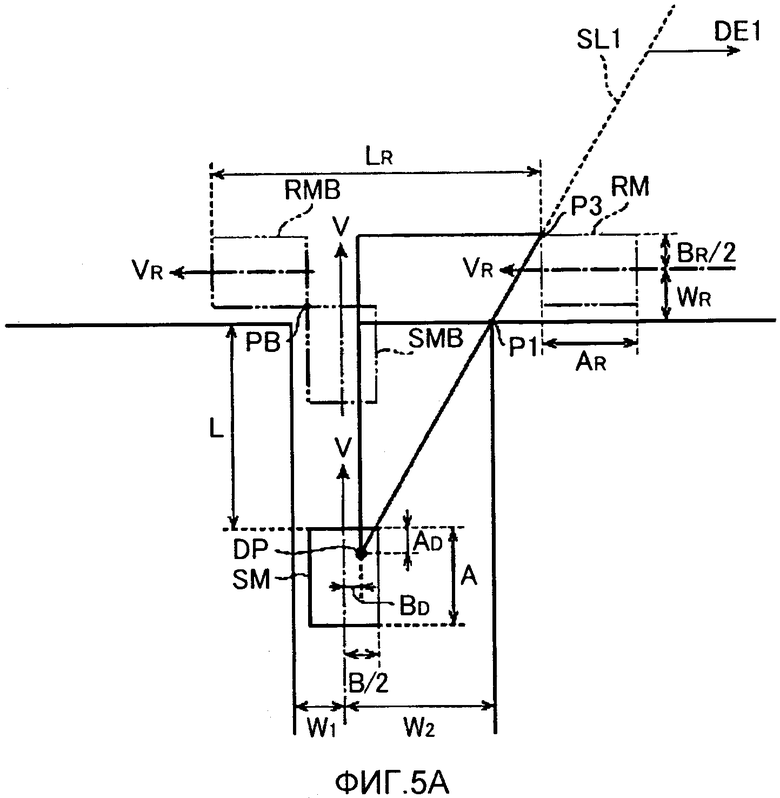
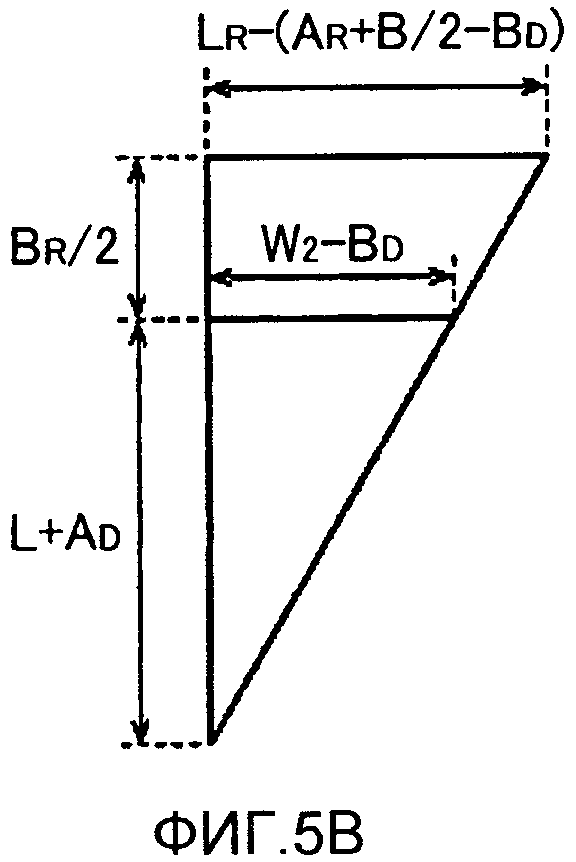
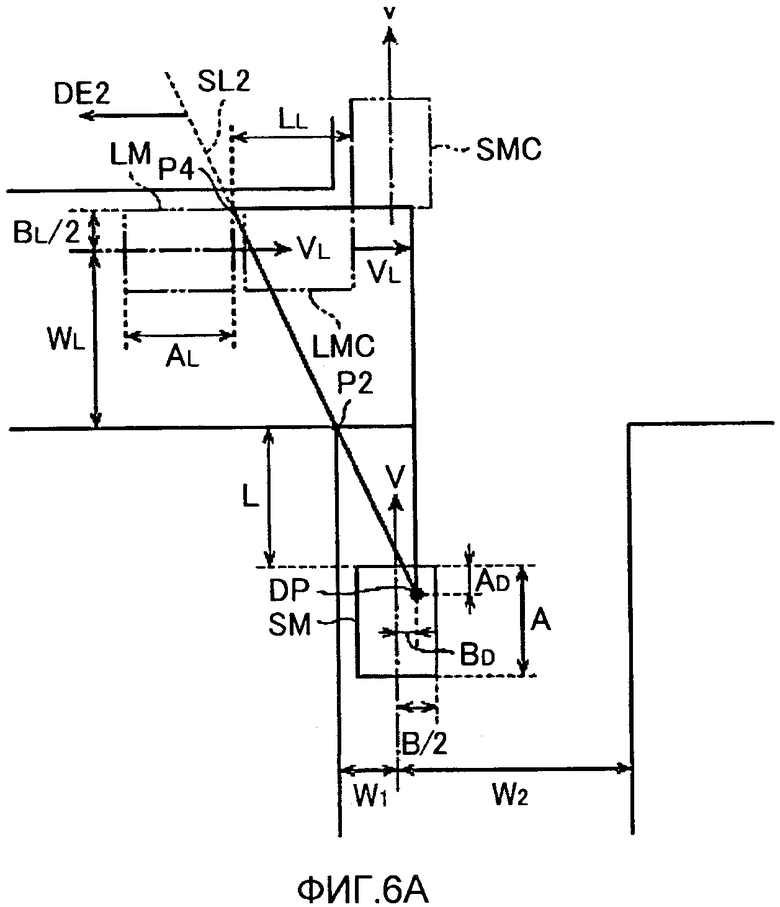
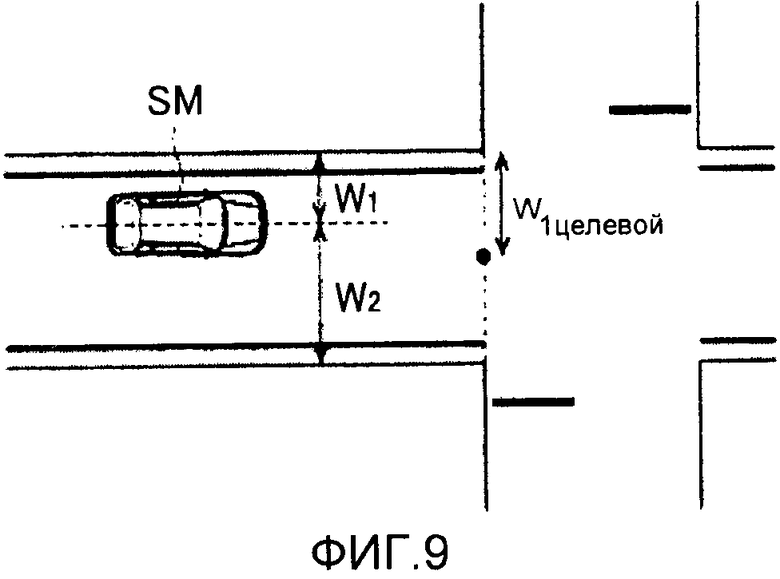
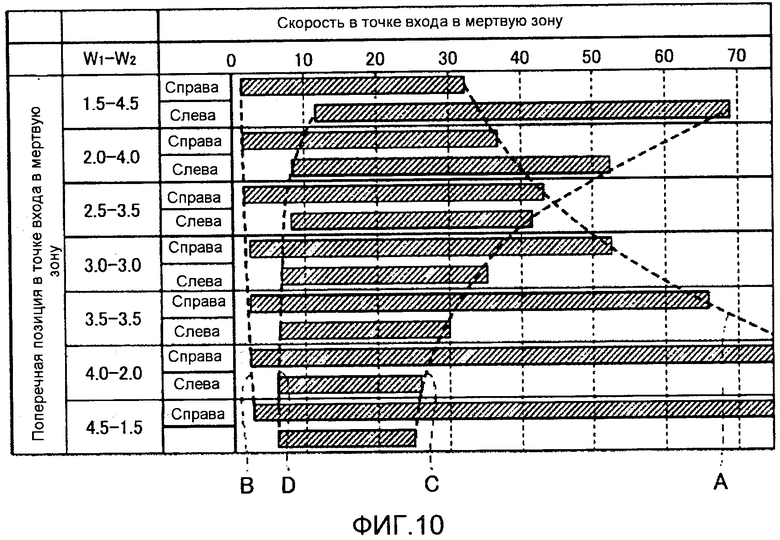
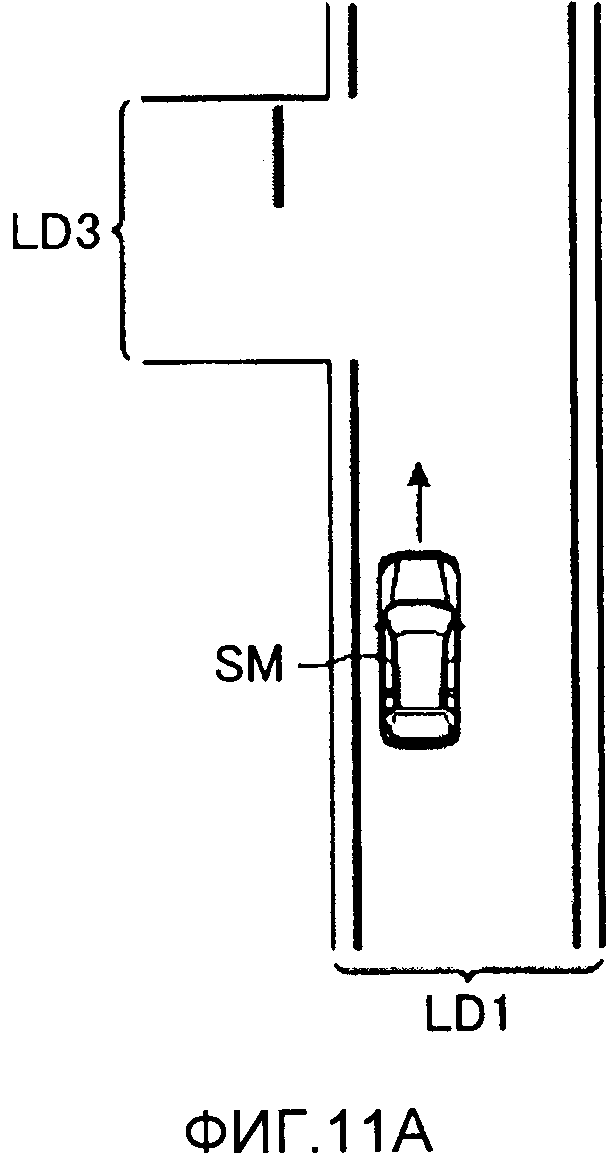
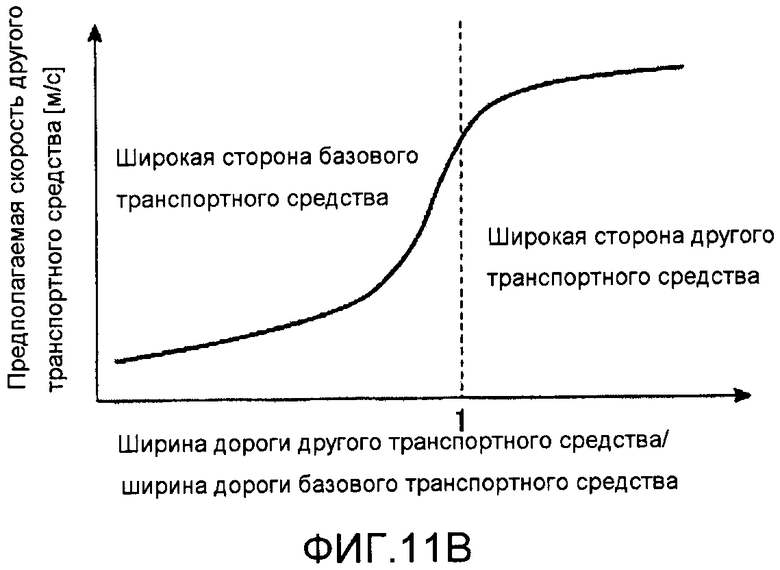
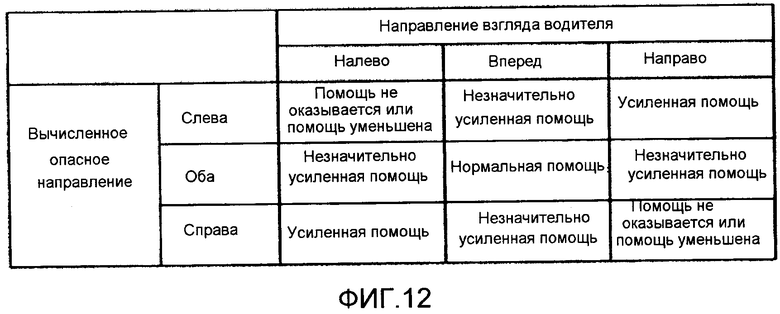
Изобретение относится к устройству помощи при вождении. Устройство содержит блок распознавания мертвой зоны, который распознает мертвую зону, которая не видна водителю в направлении движения транспортного средства, блок, который устанавливает предполагаемую скорость движущегося тела, которое может выскочить из мертвой зоны, блок вычисления области скорости, который вычисляет, на основании информации о движущемся теле, область скорости базового транспортного средства, в которой базовое транспортное средство может контактировать с движущимся телом, когда базовое транспортное средство движется в направлении продвижения, и блок вычисления целевой скорости базового транспортного средства на основании области скорости. При этом блок вычисления области скорости вычисляет область скорости посредством вычисления, по меньшей мере, условия, при котором движущееся тело может пройти до базового транспортного средства, на основании предполагаемой скорости движущегося тела. Достигается повышение безопасности дорожного движения. 12 з.п. ф-лы, 17 ил.
1. Устройство помощи при вождении, отличающееся тем, что содержит:
блок (21) распознавания мертвой зоны, который распознает мертвую зону, которая не видна водителю в направлении продвижения базового транспортного средства;
блок (22) установки информации о движущемся теле, который устанавливает, в качестве информации, которая относится к движущемуся телу, которое может выскочить из мертвой зоны, информацию о движущемся теле, включающую в себя, по меньшей мере, предполагаемую скорость движущегося тела;
блок (23) вычисления области скорости, который вычисляет, на основании информации о движущемся теле, установленной блоком (22) установки информации о движущемся теле, область скорости базового транспортного средства, при этом область скорости является областью, в которой базовое транспортное средство может контактировать с движущимся телом, когда базовое транспортное средство движется в направлении продвижения; и
блок (24) вычисления целевой скорости, который вычисляет целевую скорость базового транспортного средства на основании области скорости,
при этом блок (23) вычисления области скорости вычисляет область скорости посредством вычисления, по меньшей мере, условия, при котором движущееся тело может пройти до базового транспортного средства, на основании предполагаемой скорости движущегося тела.
2. Устройство помощи при вождении по п. 1, в котором область скорости определяется из зависимости между скоростью базового транспортного средства и расстоянием базового транспортного средства до опорной позиции в местоположении, составляющем мертвую зону.
3. Устройство помощи при вождении по п. 1 или 2, дополнительно содержащее блок (25) вычисления целевой поперечной позиции, который вычисляет целевую поперечную позицию базового транспортного средства на основании области скорости, вычисленной блоком (23) вычисления области скорости.
4. Устройство помощи при вождении по п. 1, в котором блок (22) установки информации о движущемся теле устанавливает информацию о движущемся теле на основании формы дороги, составляющей мертвую зону.
5. Устройство помощи при вождении по п. 4, в котором блок (22) установки информации о движущемся теле устанавливает информацию о движущемся теле на основании соотношения между шириной полосы движения стороны движущегося тела и шириной полосы движения стороны базового транспортного средства.
6. Устройство помощи при вождении по п. 1, в котором блок (22) установки информации о движущемся теле устанавливает информацию о движущемся теле на основании периферийной среды мертвой зоны.
7. Устройство помощи при вождении по п. 1, дополнительно содержащее блок (26) получения информации о дорожном движении, который получает информацию о дорожном движении, которая относится к дороге, составляющей мертвую зону,
при этом блок (22) установки информации о движущемся теле устанавливает информацию о движущемся теле на основании информации о дорожном движении, полученной блоком получения информации о дорожном движении.
8. Устройство помощи при вождении по п. 1, дополнительно содержащее блок (27) получения информации об опыте, который получает информацию об опыте, указывающую прошлый опыт водителя,
при этом блок (22) установки информации о движущемся теле устанавливает информацию о движущемся теле на основании информации об опыте, полученной блоком (27) получения информации об опыте.
9. Устройство помощи при вождении по п. 1, дополнительно содержащее блок (28) получения информации об объекте, который получает информацию об объекте, которая относится к поведению объекта, присутствующего в периферии базового транспортного средства,
при этом блок (22) установки информации о движущемся теле устанавливает информацию о движущемся теле на основании информации об объекте, полученной блоком (28) получения информации об объекте.
10. Устройство помощи при вождении по п. 1, дополнительно содержащее блок управления выдачей предупреждения, который выдает предупреждение водителю, чтобы предупредить водителя о мертвой зоне,
при этом, когда мертвая зона присутствует в нескольких направлениях, блок (31) управления выдачей предупреждения определяет опасное направление, по которому присутствует большая опасность, на основании формы области скорости, вычисленной блоком (23) вычисления области скорости, и управляет выдачей предупреждения таким образом, что водитель смотрит в опасном направлении.
11. Устройство помощи при вождении по п. 10, дополнительно содержащее блок (29) обнаружения направления взгляда, который обнаруживает направление взгляда водителя,
при этом блок (31) управления выдачей предупреждения может управлять выдачей предупреждения на основании опасного направления и направления взгляда.
12. Устройство помощи при вождении по п. 1, в котором информация о движущемся теле включает в себя предполагаемый размер движущегося тела.
13. Устройство помощи при вождении по п. 1, в котором блок (23) вычисления области скорости вычисляет область скорости посредством вычисления условия, при котором часть переднего угла базового транспортного средства и часть заднего угла движущегося тела перекрываются.
| JP 2011118570 A, 16.06.2011 | |||
| Замок коленного узла протеза бедра | 1959 |
|
SU128563A1 |
| WO 2010134428 A1, 25.11.2010 | |||

