ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001] Настоящее изобретение относится к устройству представления информации и способу представления информации.
УРОВЕНЬ ТЕХНИКИ
[0002] Традиционно известно устройство и способ для недопущения засыпания водителя посредством изменения момента звучания тревожного сигнала согласно состоянию водителя (см. патентный документ 1). Когда глаза водителя закрыты в течение периода, равного или большего, чем первое пороговое значение, изобретение, раскрытое в патентном документе 1, издает звук тревожного сигнала для обнаружения опасности столкновения раньше, чем в обычном режиме.
СПИСОК БИБЛИОГРАФИЧЕСКИХ ССЫЛОК
ПАТЕНТНЫЕ ДОКУМЕНТЫ
[0003] Патентный документ 1. Публикация японской патентной заявки № 2008-181327
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] Патентный документ 1 является технологией, относящейся к недопущению засыпания водителя, и выполнен без возможности издавать тревожный сигнал согласно действию, отличному от вождения, которое водитель может выполнять во время автономного управления вождением, при котором транспортное средство движется автономно.
[0005] Настоящее изобретение было выполнено, принимая во внимание вышеописанную проблему, и имеет целью предоставление устройства представления информации и способа представления информации, которые могут повышать чувство уверенности водителя и надежности при управлении автономным вождением.
[0006] Устройство представления информации согласно аспекту настоящего изобретения содержит блок вычисления уровня доверия к системе, выполненный с возможностью вычислять уровень доверия к системе для управления автономным вождением, блок представления информации, выполненный с возможностью представлять, водителю, информацию о допустимости действия, отличного от вождения, и контроллер представления информации, выполненный с возможностью управлять переключением содержимого информации, представляемой в блоке представления информации, согласно уровню доверия к системе, вычисленному посредством блока вычисления уровня доверия к системе.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
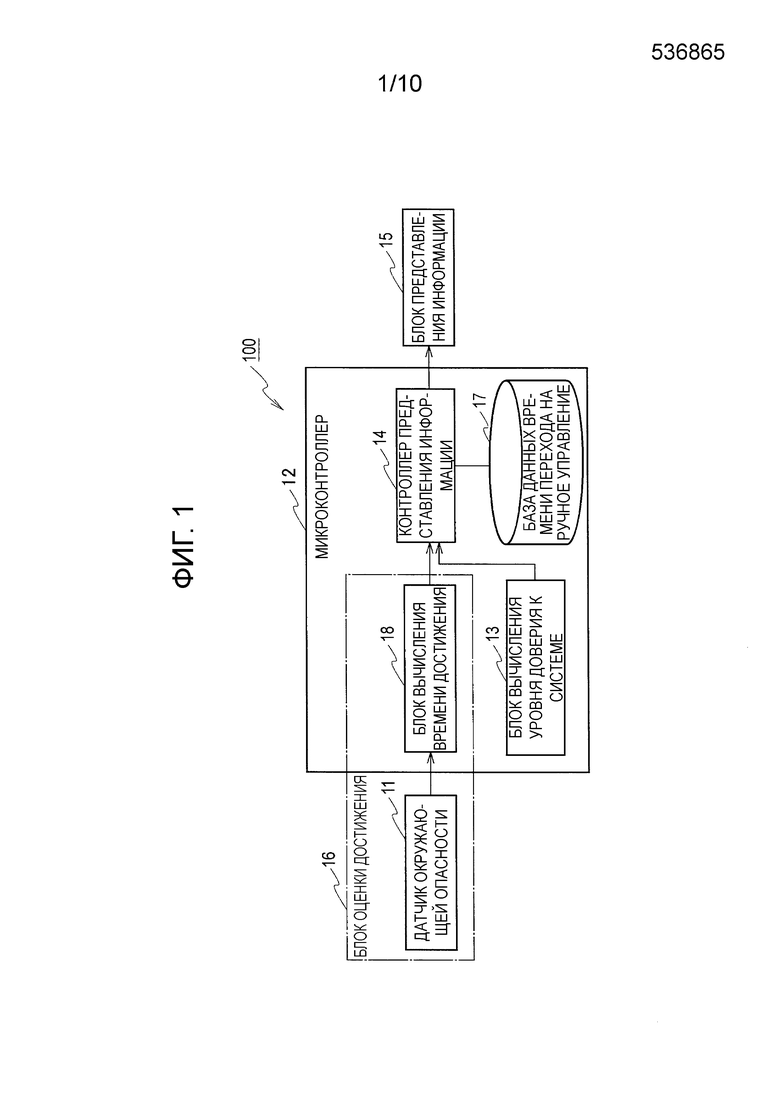
[0007] Фиг. 1 - это блок-схема, показывающая конфигурацию устройства 100 представления информации согласно варианту осуществления.
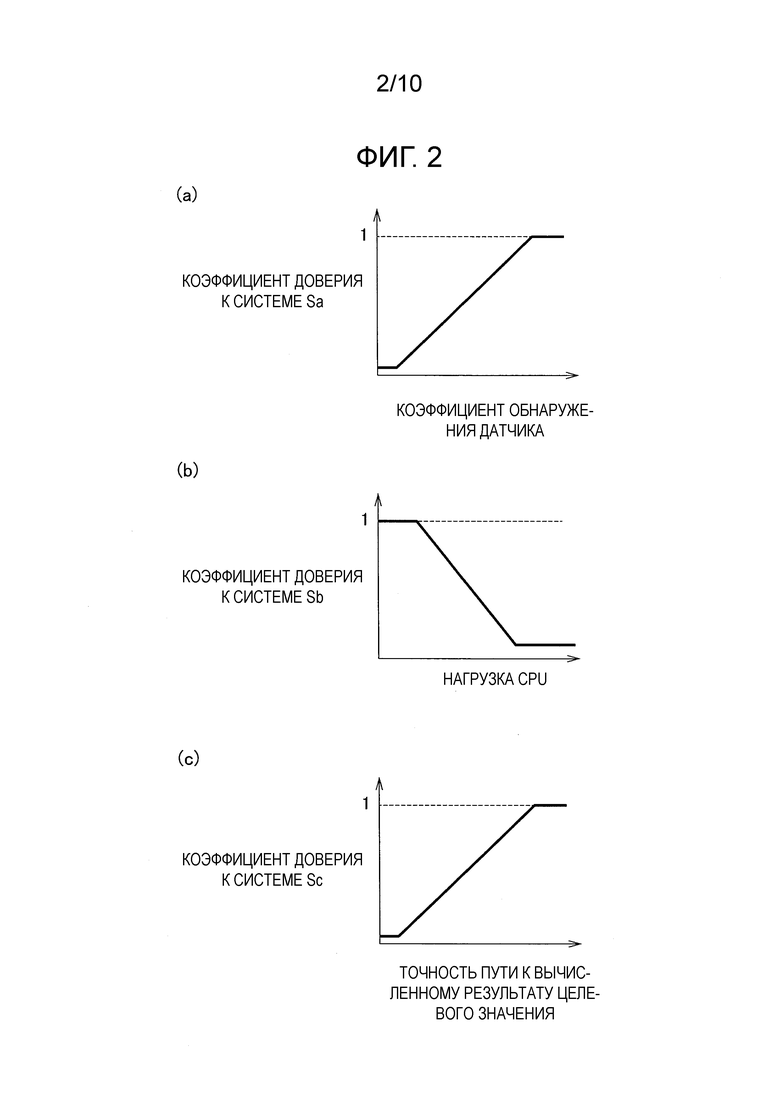
Фиг. 2(a) -это график, показывающий пример отношения между коэффициентом обнаружения датчика и коэффициентом Sa доверия к системе, Фиг. 2(b) -это график, показывающий пример отношения между нагрузкой CPU и коэффициентом Sb доверия к системе, и Фиг. 2(c) -это график, показывающий пример отношения между точностью пути к вычисленному результату целевого значения и коэффициентом Sc доверия к системе.
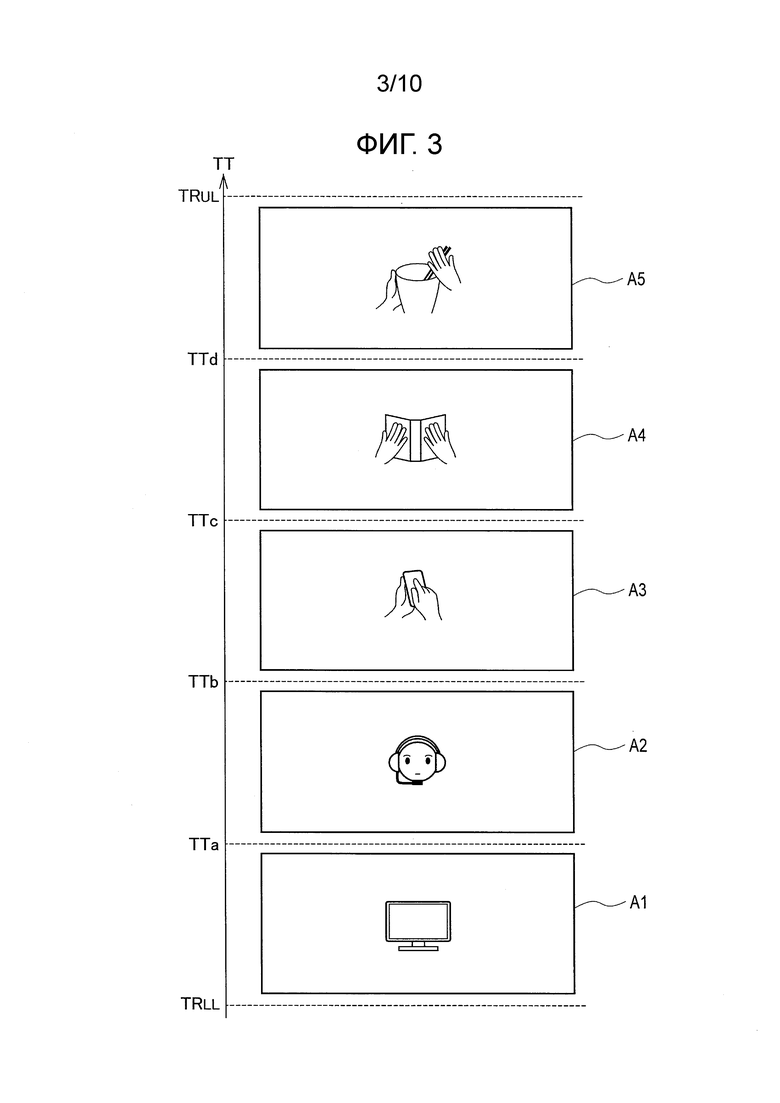
Фиг. 3 показывает пример времени TT перехода на ручное управление для каждого действия, отличного от вождения, которое хранится в базе данных 17 времени перехода на ручное управление на фиг. 1, и показывает действия, которые водителю разрешено выполнять помимо вождения.
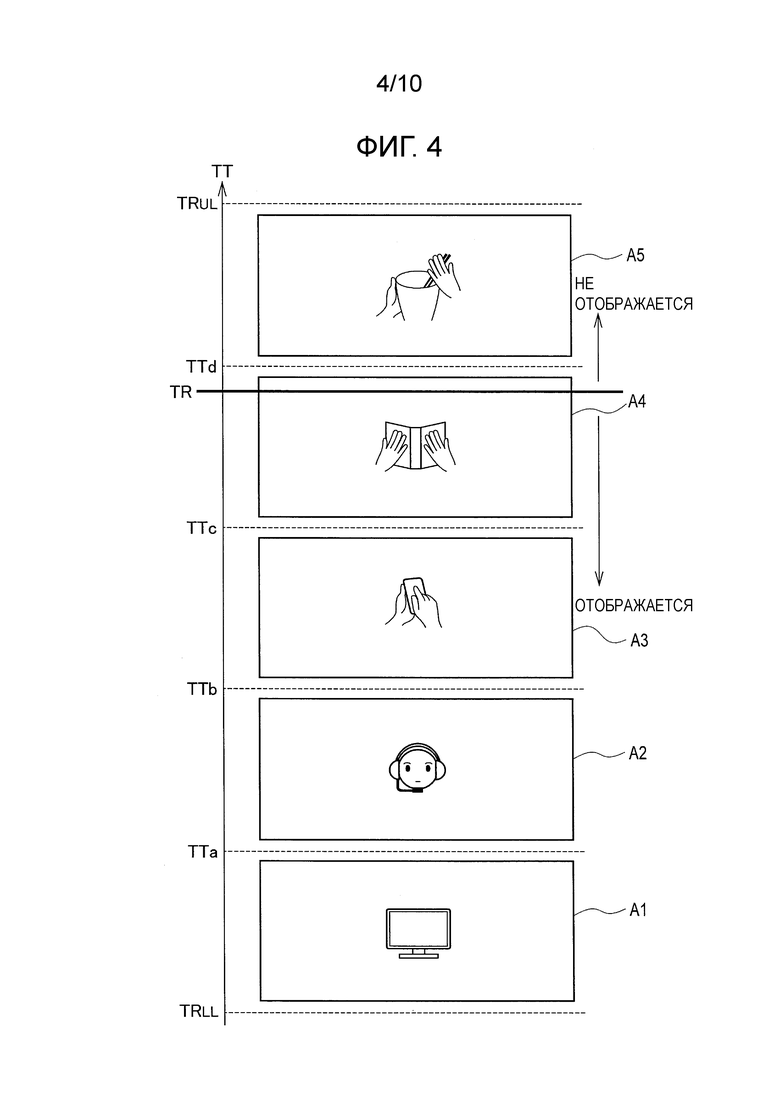
Фиг. 4 - это схема, иллюстрирующая работу контроллера 14 представления информации, который выбирает, согласно времени TR достижения, тип действия, которое водителю разрешается выполнять помимо вождения, и представляет тип водителю.
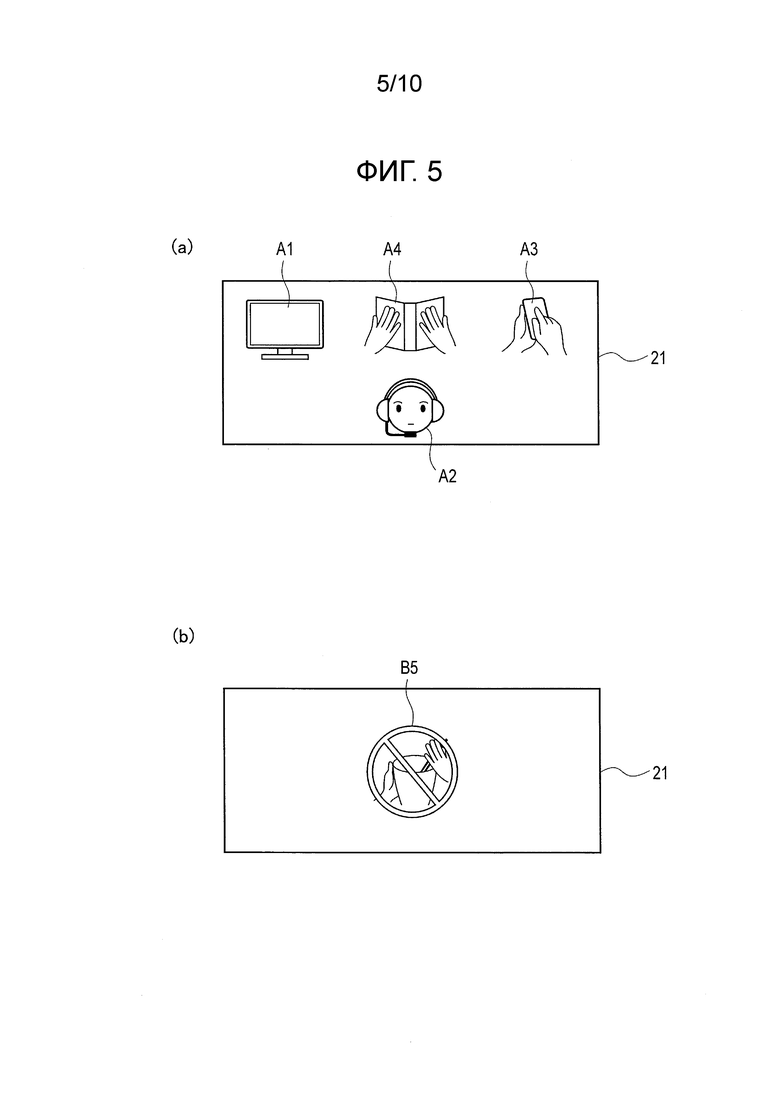
Фиг. 5 - это схема, показывающая пример отображения действия, которое водителю разрешается выполнять помимо вождения, действие выбирается согласно времени TR достижения, показанному на фиг. 4, и Фиг. 5(b) - это схема, показывающая пример отображения действия, которое водителю не разрешается выполнять помимо вождения, действие выбирается согласно времени TR достижения, показанному на фиг. 9.
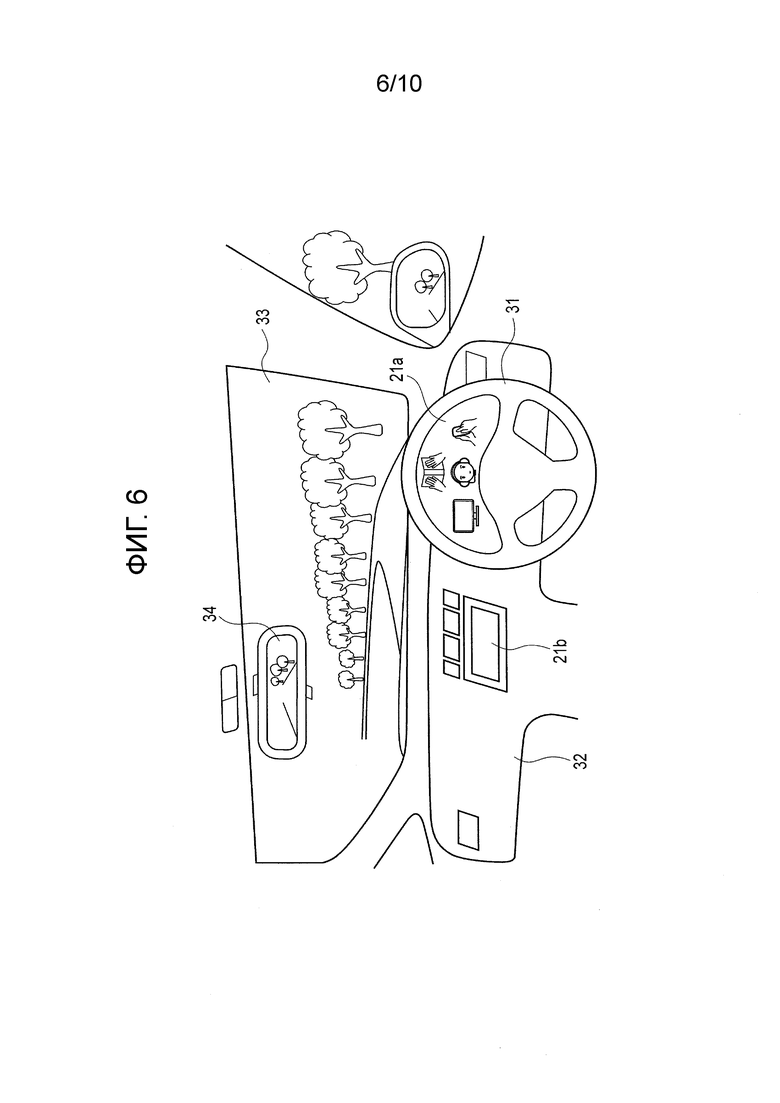
Фиг. 6 - это внешний вид, показывающий пример блока 15 представления информации, установленного в салоне транспортного средства.
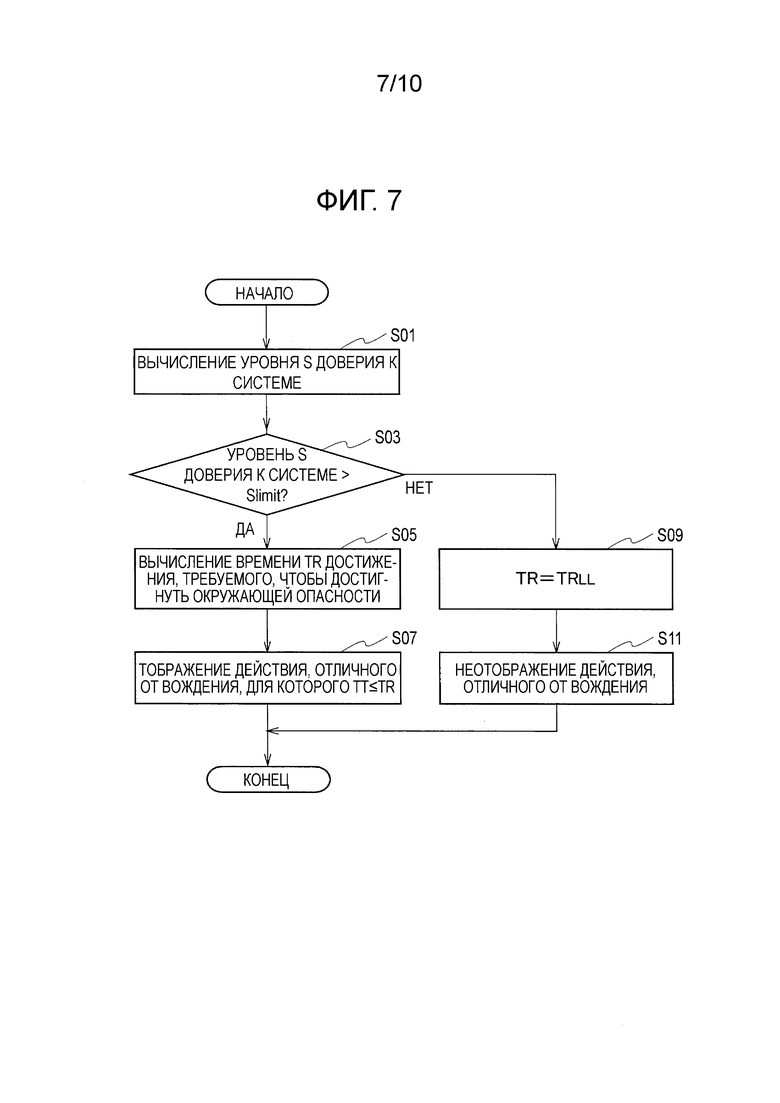
Фиг. 7 - это блок-схема последовательности операций, показывающая пример способа представления информации с помощью устройства 100 представления информации на фиг. 1.
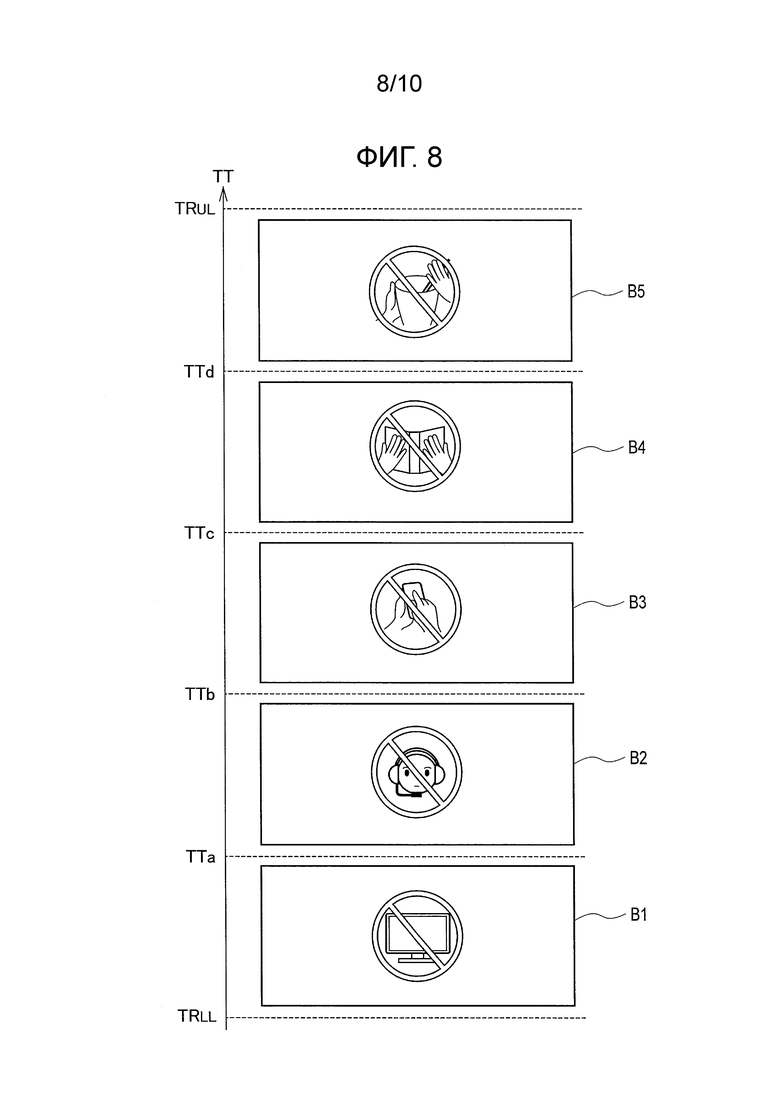
Фиг. 8 показывает пример времени TT перехода на ручное управление для каждого действия, отличного от вождения, во втором варианте осуществления, и показывает действия, которые водителю не разрешается выполнять помимо вождения.
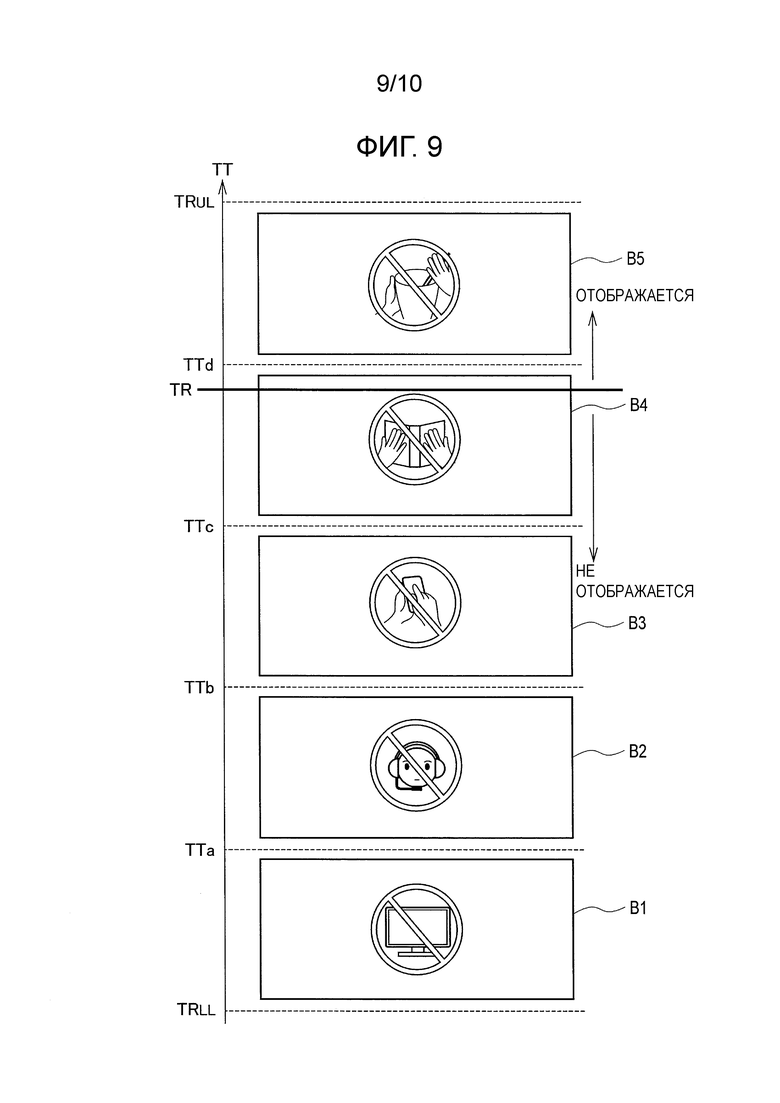
Фиг. 9 - это схема, иллюстрирующая работу контроллера 14 представления информации, который выбирает, согласно времени TR достижения, тип действия, которое водителю не разрешается выполнять помимо вождения, и представляет тип водителю.
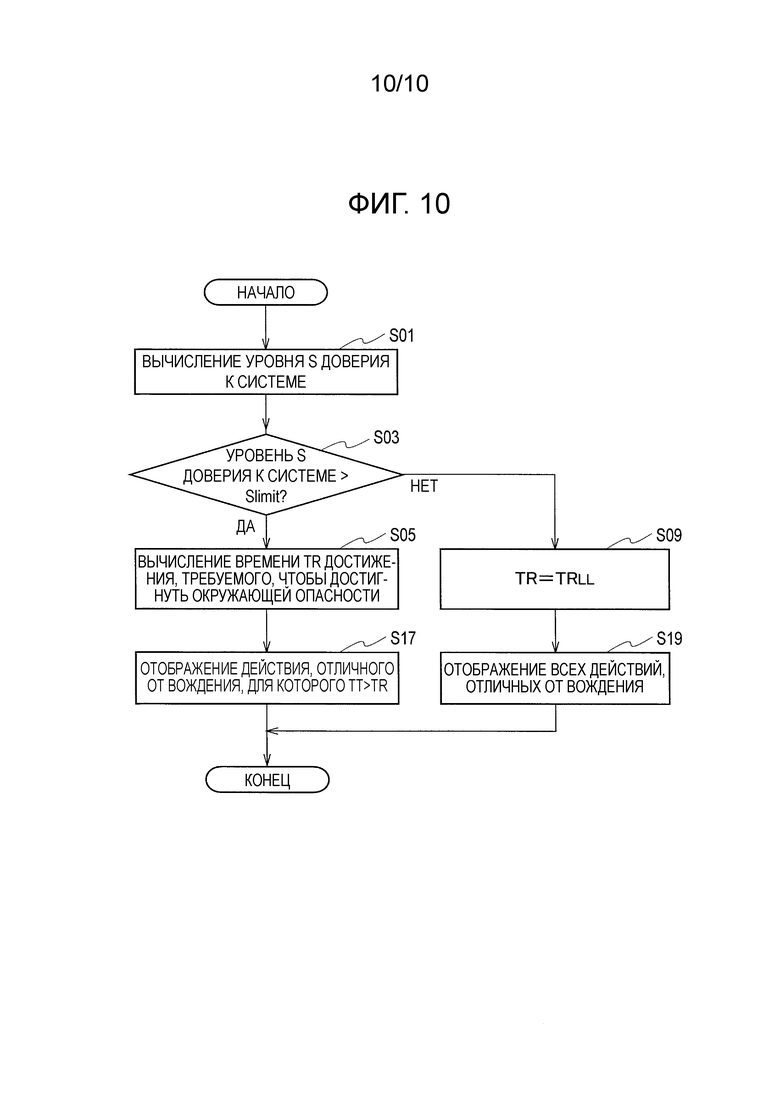
Фиг. 10 - это блок-схема последовательности операций, показывающая пример способа представления информации согласно второму варианту осуществления.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0008] Варианты осуществления настоящего изобретения описываются ниже в данном документе со ссылкой на чертежи. Одинаковые компоненты обозначаются одинаковыми ссылочными знаками, чтобы избегать повторяющегося описания.
[0009] [ПЕРВЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ]
КОНФИГУРАЦИЯ УСТРОЙСТВА ПРЕДСТАВЛЕНИЯ ИНФОРМАЦИИ
Со ссылкой на фиг. 1 описывается конфигурация устройства 100 представления информации согласно первому варианту осуществления. Устройство 100 представления информации применимо к автономному транспортному средству, способному переключаться между управлением автономным вождением, в котором транспортное средство движется автономно, и управлением ручным вождением, в котором транспортное средство управляется водителем, переключение выполняется на основе условий движения транспортного средства и внешнего окружения транспортного средства. Устройство 100 представления информации представляет водителю информацию о допустимости действия, отличного от вождения, во время управления автономным вождением.
[0010] Устройство 100 представления информации первого варианта осуществления представляет водителю информацию, указывающую действие, которое водителю разрешается выполнять помимо вождения, во время управления автономным вождением. Множество типов предварительно определено для действий, отличных от вождения. Устройство 100 представления информации отображает только тип, который водителю разрешается выполнять, который определяется согласно системе управления, используемой для управления автономным вождением и окружающим обстановкам транспортного средства.
[0011] Например, когда переключение с управления автономным вождением на управление ручным вождением является необязательным, устройство 100 представления информации представляет все типы водителю в качестве действий, которые водителю разрешается выполнять помимо вождения. Когда переключение с управления автономным вождением на управление ручным вождением является необходимым, с другой стороны, устройство 100 представления информации отображает только тип, который водителю разрешается выполнять, который определяется согласно срочности необходимости для переключения.
[0012] В частности, устройство 100 представления информации, показанное на фиг. 1, включает в себя датчик 11 окружающей опасности, микроконтроллер 12 и блок 15 представления информации.
[0013] Датчик 11 окружающей опасности обнаруживает окружающую опасность, которая является фактором, существующим в окрестностях транспортного средства, чтобы мешать управлению автономным вождением. В частности, датчик 11 окружающей опасности обнаруживает позицию на карте, в которой прогнозируется, что управление автономным вождением может быть запрещено для продолжения, или препятствие, которое служит в качестве причины для недопущения продолжения управления автономным вождением. Например, с помощью камеры, установленной в транспортном средстве, считываемой информации от лазерного радара или инфракрасного датчика, или GPS-информации, датчик 11 окружающей опасности обнаруживает окружающую опасность, которой является другое транспортное средство, припаркованное на текущей полосе движения транспортного средства, загруженный движением участок дороги или пешеход, который входит или может войти на текущую полосу движения транспортного средства.
[0014] Блок 15 представления информации представляет информацию о допустимости действия, отличного от вождения, водителю. В частности, как показано на фиг. 6, блок 15 представления информации является дисплеем (21a, 21b), предусмотренным на приборной панели 32 и выполненным с возможностью отображать изображение значка или изображения значков, показанные на фиг. 3, которые должны быть описаны позже, в качестве информации о допустимости действия, отличного от вождения. Само собой разумеется, блок 15 представления информации может отображать информацию, указывающую действие, отличное от вождения, на части переднего ветрового стекла 33 или зеркала 34 заднего вида.
[0015] Микроконтроллер 12 включает в себя CPU, память и блок ввода и вывода. CPU выполняет предварительно установленные компьютерные программы, чтобы реализовывать множество процессоров обработки информации в устройстве 100 представления информации. Процессоры информации, реализованные посредством микроконтроллера 12, включают в себя блок 18 вычисления времени достижения, блок 13 вычисления уровня доверия к системе и контроллер 14 представления информации. Часть памяти в микроконтроллере 12 составляет базу данных 17 времени перехода на ручное управление (хранилище данных). Микроконтроллер 12 может быть использован также в качестве ECU (электронного блока управления), используемого для другого управления транспортным средством (например, управления автономным вождением).
[0016] Блок 18 вычисления времени достижения вычисляет время TR достижения, которое является периодом времени, требуемого для того, чтобы транспортное средство достигло окружающей опасности, обнаруженной посредством датчика 11 окружающей опасности. Время TR достижения - это предполагаемое время, которое требуется для того, чтобы транспортное средство в его текущей позиции достигло окружающей опасности. Таким образом, блок 18 вычисления времени достижения принимает ввод информации об окружающей опасности и информации о текущей позиции транспортного средства и вычисляет время TR достижения на основе этих частей информации. Информация об окружающей опасности вводится посредством датчика 11 окружающей опасности, а информация о текущей позиции транспортного средства вводится посредством навигационной системы, установленной в транспортном средстве. Датчик 11 окружающей опасности и блок 18 вычисления времени достижения составляют блок 16 оценки достижения, выполненный с возможностью оценивать время достижения, требуемое, чтобы транспортное средство достигло окружающей опасности.
[0017] Например, блок 18 вычисления времени достижения вычисляет время TR достижения с помощью формулы (1). В формуле (1) OBD означает расстояние от транспортного средства до препятствия (такого как другое транспортное средство или пешеход), LDD представляет расстояние до точки, где транспортное средство отклоняется от проезжей части дороги, VLD означает расстояние до конечной точки скоростной автомагистрали, VL означает скорость транспортного средства, и TTC означает время до столкновения с движущимся впереди транспортным средством. L1, L2 и L3 - это коэффициенты, которые изменяются в зависимости от условий движения транспортного средства (скорости транспортного средства и коэффициента трения о поверхность дороги) и типа транспортного средства. Точка терминала - это точка, в которой управление движением должно быть переключено на ручной режим вождения в пункте взимания платы на автомагистрали, позиция пункта взимания платы или позиция до пункта взимания платы на предварительно определенном расстоянии от него. Кроме того, "Min" указывает наименьшее из значений внутри последующих скобок.
[0018] [Выражение 1]

[0019] Блок 13 вычисления уровня доверия к системе вычисляет уровень доверия к системе на основе, по меньшей мере, одного из коэффициента обнаружения датчика, нагрузки CPU и точности пути к вычисленному результату целевого значения. Уровень доверия к системе указывает состояние системы управления, используемой для управления автономным вождением.
[0020] Коэффициент обнаружения датчика - это отношение текущей способности датчика к максимальной способности датчика. Датчик - это датчик, используемый для управления автономным вождением, чтобы измерять цели внутри и снаружи транспортного средства. Например, для датчика, способного обнаруживать препятствие вплоть до 200 метров впереди транспортного средства, коэффициент обнаружения датчика равна 0,5, если лазерный датчик может обнаруживать препятствие только в 100 метрах впереди. Блок 13 вычисления уровня доверия к системе вычисляет коэффициент Sa доверия к системе на основе коэффициента обнаружения датчика посредством обращения к данным, показанным на фиг. 2(a).
[0021] Нагрузка CPU - это отношение текущей возможности арифметической обработки CPU к максимальной возможности арифметической обработки CPU. CPU - это центральный процессор, используемый для управления автономным вождением. Блок 13 вычисления уровня доверия к системе вычисляет коэффициент Sb доверия к системе на основе нагрузки CPU посредством обращения к данным, показанным на фиг. 2(b).
[0022] Точность пути к вычисленному результату целевого значения указывает, насколько хорошо путь движения, предпринятый транспортным средством под управлением автономным вождением, совпадает с дорогой (целевым значением), указанной посредством навигационной системы. Например, точность является низкой, когда путь движения значительно отклоняется от целевого значения вследствие темноты ночного времени или плохой погоды (такой как дождь или сильный ветер). Точность является высокой, когда путь движения не отклоняется так сильно от целевого значения в дневное время. Блок 13 вычисления уровня доверия к системе вычисляет коэффициент Sc доверия к системе на основе точности пути к вычисленному результату целевого значения посредством обращения к данным, показанным на фиг. 2(c).
[0023] Каждый из коэффициентов (Sa, Sb, Sc) доверия к системе является изменяемым от предварительно определенного положительного числа (нижнего предельного значения) до 1. Данные, показанные на фиг. 2(a)-2(c), хранятся в памяти, доступной блоку 13 вычисления уровня доверия к системе. Коэффициенты (Sa, Sc) доверия к системе увеличиваются, когда коэффициент обнаружения датчика и точность пути до вычисленного результата целевого значения увеличиваются, соответственно, а коэффициент (Sb) доверия к системе уменьшается, когда нагрузка CPU увеличивается.
[0024] Блок 13 вычисления уровня доверия к системе вычисляет уровень (S) доверия к системе, умножая коэффициенты (Sa, Sb, Sc) доверия к системе, как показано в формуле (2).
[0025] S=Sa×Sb×Sc×100(%) (2)
База данных 17 времени перехода на ручное управление хранит, для каждого действия, отличного от вождения, время TT перехода на ручное управление, требуемое, чтобы водитель выполнил действие, отличное от вождения, чтобы быть готовым принять управление и вести транспортное средство. В частности, база данных 17 времени перехода на ручное управление хранит время TT перехода на ручное управление для каждого из множества предварительно определенных типов (A1-A5).
[0026] Время TT перехода на ручное управление - это время, требуемое между моментом, когда водитель замечает, что он должен прекратить действие, отличное от вождения, и когда водитель прекращает действие, отличное от вождения, и готов вести транспортное средство сам. Например, требуется около одной секунды для того, чтобы водитель, руки которого сняты с рулевого колеса, схватился за рулевое колесо. Требуется около одной секунды для того, чтобы водитель, глаза которого фиксируются на переносном устройстве или т.п., перевел свои глаза вперед транспортного средства. База данных 17 времени перехода на ручное управление хранит время перехода на ручное управление для каждого действия, отличного от вождения с физической точки зрения.
[0027] Тип A1 на фиг. 3 включает в себя действие, которое использует зрение и слух, но не другие органы чувств: руку (касание), обоняние и вкус. Примером такого действия является просмотр телевизора, установленного в салоне транспортного средства. Тип A1 имеет кратчайшее время перехода на ручное управление среди всех типов (A1-A5), поскольку действие типа A1 не затрагивает руку или речь. Тип A2 включает в себя действие разговора с другим человеком с помощью гарнитуры без использования рук, например, который выполняется по телефону, и действие использование головного дисплея, такого как носимое устройство. Тип A2 имеет кратчайшее время (TTa) перехода на ручное управление следом за типом A1, поскольку действие типа A2 не затрагивает руку (касание), но затрагивает речь. Тип A3 включает в себя действие эксплуатации устройства связи с помощью зрения и руки (касание), например, просмотр Интернета, текстовую переписку и игру. Тип A3 имеет кратчайшее время (TTb) перехода на ручное управление следом за типом A2, поскольку действие A3 затрагивает руку.
[0028] Тип A4 включает в себя действие чтения книги, удерживаемой в руке. Тип A4 имеет кратчайшее время (TTc) перехода на ручное управление следом за типом A3, поскольку чтение книги требует более высокой концентрации, чем действия других типов (A1-A3, A5). Тип A5 включает в себя действие, затрагивающее руку (касание), вкус и обоняние, т.е., прием пищи. Тип A5 имеет самое длительное время (TTd) перехода на ручное управление среди всех типов (A1-A5), поскольку водитель должен положить еду и тарелку устойчиво внутри транспортного средства для перехода от приема пищи к вождению. Отметим, что время перехода на ручное управление для типа A1 равно нижнему предельному значению (TRLL) времени достижения. Верхнее предельное значение времени TR достижения задается даже более длительным, чем время (TTd) перехода на ручное управление. Отношения между типами (A1-A5) и временем TT перехода на ручное управление, описанные выше в данном документе, являются просто примерами. Типы могут быть заданы на основе критериев, отличных от органов чувств человека, или типы (A1-A5) на фиг. 3 могут быть использованы, как они есть, но классифицированными в другом порядке времени TT перехода на ручное управление.
[0029] Контроллер 14 представления информации управляет переключением содержимого информации, представляемой в блоке 15 представления информации, согласно времени TR достижения, оцененному посредством блока 16 оценки достижения, и уровню S доверия к системе, вычисленному посредством устройства 13 вычисления уровня доверия к системе.
[0030] В частности, когда уровень S доверия к системе равен или меньше предварительно определенного порогового значения (Slimit), вероятно должен выполняться переход от управления автономным вождением к управлению ручным вождением. Таким образом, чтобы уведомлять водителя о возможном переходе к ручному вождению, контроллер 14 представления информации представляет, водителю, информацию, указывающую, что не существует действия, которое водителю разрешается выполнять помимо вождения. С другой стороны, когда уровень S доверия к системе больше предварительно определенного порогового значения (Slimit), вероятно не должен выполняться переход от управления автономным вождением к управлению ручным вождением. Таким образом, контроллер 14 представления информации выбирает действие (или действия), которые водителю разрешается выполнять помимо вождения согласно времени TR достижения, и представляет действие водителю. Например, контроллер 14 представления информации определяет действие, которое водителю разрешается выполнять помимо вождения, сравнивая время TR достижения, вычисленное посредством блока 18 вычисления времени достижения, с временем TT перехода на ручное управление, сохраненным в базе данных 17 времени перехода на ручное управление.
[0031] В качестве информации, указывающей действие, которое водителю разрешается выполнять помимо вождения, контроллер 14 представления информации представляет, в блоке 15 представления информации, информацию, указывающую действие, отличное от вождения, время TT перехода на ручное управление для которого равно или короче времени TR достижения. Например, когда время TR достижения находится где-то между временем TTc перехода на ручное управление и временем TTd перехода на ручное управление, как показано на фиг. 4, действие, отличное от вождения, время TT перехода на ручное управление для которого равно или меньше времени TR достижения, является действиями, принадлежащими к типам A1-A4. Таким образом, в качестве информации, указывающей действие, которое водителю разрешается выполнять помимо вождения, контроллер 14 представления информации представляет, в блоке 15 представления информации, изображения значков для типов A1-A4, показанные на фиг. 4. Например, как показано на фиг. 5(a), множество изображений значков может быть отображено вместе на дисплее (21a, 21b), переднем ветровом стекле 33 или зеркале 34 заднего вида на фиг. 6. Взглянув на изображения значков, указывающие действия, которые водителю разрешается выполнять, водитель может понимать состояние системы, используемой для управления автономным вождением.
[0032] Работа устройства 100 представления информации
Далее, со ссылкой на фиг. 7, описывается пример способа представления информации с помощью устройства 100 представления информации на фиг. 1. Блок-схема последовательности операций на фиг. 7 повторяется с периодом, предварительно определенным посредством микроконтроллера.
[0033] На этапе S01 блок 13 вычисления уровня доверия к системе вычисляет уровень S доверия к системе на основе коэффициента обнаружения датчика, нагрузки CPU и точности пути к вычисленному результату целевого значения с помощью формулы (2). На этапе S03 контроллер 14 представления информации определяет, больше ли уровень S доверия к системе предварительно определенного порогового уровня (Slimit).
[0034] Когда уровень S доверия к системе больше предварительно определенного порогового значения (Slimit) (ДА на этапе S03), указывая, что система не имеет чего-либо вроде срочности в своем состоянии, определяется, что вероятно не должен выполняться переход с управления автономным вождением на управление ручным вождением. Затем, на этапе S05, блок 18 вычисления времени достижения вычисляет время TR достижения, требуемое, чтобы транспортное средство достигло окружающей опасности, обнаруженной посредством датчика 11 окружающей опасности. Затем, на этапе S07, контроллер 14 представления информации отображает, в блоке 15 представления информации, изображение значка, указывающее действие типа (A1-A5), время TT перехода на ручное управление для которого равно или короче времени TR достижения. Когда датчик 11 окружающей опасности не обнаруживает окружающую опасность, контроллер 14 представления информации определяет, что не существует окружающей опасности, и задает время достижения в его верхнее предельное значение (TRUL). В результате, блок 15 представления информации отображает изображения значков для всех типов (A1-A5).
[0035] Между тем, когда уровень S доверия к системе равен или меньше предварительно определенного порогового значения (Slimit) (НЕТ на этапе S03), указывая, что система имеет что-то вроде срочности в своем состоянии, определяется, что вероятно должен выполняться переход с управления автономным вождением на управление ручным вождением. Затем, на этапе S09, контроллер 14 представления информации устанавливает время TR достижения в его нижнее предельное значение (TRLL). Поскольку нет типа (A1-A5), который имеет время TT перехода на ручное управление, равное или более короткое, чем время (TRLL) достижения, блок 15 представления информации не отображает какое-либо изображение значка, указывающее действие, которое водителю разрешается выполнять помимо вождения (S11). Таким образом, водитель может быть проинформирован, что не существует действия, которое водителю разрешается выполнять помимо вождения.
[0036] Первый вариант осуществления, описанный выше, может добиваться следующих полезных результатов.
[0037] Контроллер 14 представления информации управляет переключением содержимого информации, представляемой в блоке 15 представления информации, согласно уровню S доверия к системе, вычисленному посредством блока 13 вычисления уровня доверия к системе. Представление действия, которое водитель может выполнять помимо вождения, предоставляет возможность водителю понимать состояние системы, используемой для управления автономным вождением. Это снижает нагрузку на водителя при наблюдении за автономным движением и повышает чувство уверенности водителя и надежности при управлении автономным вождением.
[0038] В качестве информации о допустимости действия, отличного от вождения, контроллер 14 представления информации представляет, в блоке 15 представления информации, информацию, указывающую действие, которое водителю разрешается выполнять помимо вождения. Представление действия, которое водитель может выполнять помимо вождения, предоставляет возможность водителю понимать состояние системы, используемой для управления автономным вождением.
[0039] Блок 13 вычисления уровня доверия к системе вычисляет уровень S доверия к системе, по меньшей мере, на основе одного из коэффициента обнаружения датчика, используемого для управления автономным вождением, коэффициента нагрузки центрального процессора, используемого для управления автономным вождением, и точности пути к вычисленному результату целевого значения. Таким образом, состояние системы управления, используемой для управления автономным вождением, может быть точно определено.
[0040] Контроллер 14 представления информации определяет информацию для представления водителю, сравнивая время TR достижения, оцененное посредством блока 16 оценки достижения, с временем TT перехода на ручное управление, сохраненным в базе данных 17 времени перехода на ручное управление. Водитель, выполняющий представленное действие, отличное от вождения, может принимать управление и вести транспортное средство, прежде чем будет выполнен переход от управления автономным вождением на управление ручным вождением. Таким образом, ощущение уверенности водителя и надежности при управлении автономным вождением повышается.
[0041] В качестве информации, указывающей действие, которое водителю разрешается выполнять помимо вождения, контроллер 14 представления информации представляет, в блоке 15 представления информации, информацию, указывающую действие, отличное от вождения, время TT перехода на ручное управление для которого равно или короче времени TR достижения. Водитель, выполняющий действие, отличное от вождения, время TT перехода на ручное управление для которого равно или короче времени TR достижения, может принимать управление и вести транспортное средство, прежде чем будет выполнен переход от управления автономным вождением на управление ручным вождением.
[0042] [ВТОРОЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ]
Вместо представления действия, которое водителю разрешается выполнять помимо вождения, устройство 100 представления информации на фиг. 1 может представлять действие, которое водителю не разрешается выполнять помимо вождения, на основе времени TR достижения и уровня S доверия к системе.
[0043] Во втором варианте осуществления контроллер 14 представления информации представляет, в блоке 15 представления информации, информацию, указывающую действие, которое водителю не разрешается выполнять помимо вождения, в качестве информации о допустимости действия, отличного от вождения. В частности, в качестве информации, указывающей действие, которое водителю не разрешается выполнять помимо вождения, контроллер 14 представления информации представляет, в блоке 15 представления информации, информацию, указывающую действие, отличное от вождения, время TT перехода на ручное управление для которого продолжительней времени TR достижения.
[0044] Как показано на фиг. 8, изображение значка, отображаемое в блоке 15 представления информации, является символом запрета, наложенным на значок, показанный на фиг. 3. Более конкретно, значок, указывающий действие, которое водителю не разрешается выполнять помимо вождения, формируется наложением символа запрета на значок, указывающий действие, отличное от вождения. Однако, время TT перехода на ручное управление для каждого из действий, отличных от вождения, сохраненное в базе данных 17 времени перехода на ручное управление, может быть таким же, что и время, показанное на фиг. 3. Действия, отличные от вождения, которые принадлежат типам (B1-B5), могут быть такими же, что и действия, принадлежащие типам (A1-A5) на фиг. 3.
[0045] Когда уровень S доверия к системе равно или меньше предварительно определенного порогового значения (Slimit), переход вероятно должен выполняться от управления автономным вождением к управлению ручным вождением. Таким образом, чтобы уведомлять водителя о возможном переходе на ручное вождение, контроллер 14 представления информации представляет, водителю, информацию, указывающую, что водителю не разрешается выполнять действия, отличные от вождения, которые принадлежат всем типам (B1-B5). Когда уровень S доверия к системе больше предварительно определенного порогового значения (Slimit), с другой стороны, вероятно не должен выполняться переход от управления автономным вождением к управлению ручным вождением. Таким образом, контроллер 14 представления информации выбирает действие, которое водителю не разрешается выполнять помимо вождения согласно времени TR достижения, и представляет действие водителю. Например, контроллер 14 представления информации определяет действие, которое водителю не разрешается выполнять помимо вождения, сравнивая время TR достижения, вычисленное посредством блока 18 вычисления времени достижения, с временем TT перехода на ручное управление, сохраненным в базе данных 17 времени перехода на ручное управление.
[0046] В качестве информации, указывающей действие, которое водителю не разрешается выполнять помимо вождения, контроллер 14 представления информации представляет, в блоке 15 представления информации, информацию, указывающую действие, отличное от вождения, время TT перехода на ручное управление для которого продолжительней времени TR достижения. Например, когда время TR достижения находится где-либо между временем TTc перехода на ручное управление и временем TTd перехода на ручное управление, как показано на фиг. 9, действие, отличное от вождения, время TT перехода на ручное управление для которого продолжительней времени TR достижения, является действием, принадлежащим типу B5. Таким образом, в качестве информации, указывающей действие, которое водителю не разрешается выполнять помимо вождения, контроллер 14 представления информации представляет, в блоке 15 представления информации, изображение значка для типа B5, показанное на фиг. 9. Например, как показано на фиг. 5(b), изображение значка для типа B5 может быть отображено на дисплее (21a, 21b), переднем ветровом стекле 33 или зеркале 34 заднего вида на фиг. 6. Взглянув на изображение значка, указывающее действие, которое водителю не разрешается выполнять, водитель может легко понимать состояние системы, используемой для управления автономным вождением.
[0047] Со ссылкой на фиг. 10 описывается работа устройства 100 представления информации согласно второму варианту осуществления. Когда уровень S доверия к системе больше предварительно определенного порогового значения (Slimit) (ДА на этапе S03), на этапе S07 контроллер 14 представления информации отображает, в блоке 15 представления информации, изображение значка для типа (B1-B5), время TT перехода на ручное управление для которого продолжительней времени TR достижения. Когда датчик 11 окружающей опасности не обнаруживает окружающую опасность, контроллер 14 представления информации определяет, что не существует окружающей опасности, и задает время достижения в его верхнее предельное значение (TRUL). В результате, блок 15 представления информации не отображает какое-либо изображение значка, указывающее действие, которое водителю не разрешается выполнять помимо вождения.
[0048] Между тем, когда уровень S доверия к системе равен или меньше предварительно определенного порогового значения (Slimit) (НЕТ на этапе S03), на этапе S09 контроллер 14 представления информации устанавливает время TR достижения в его нижнее предельное значение (TRLL). В результате, блок 15 представления информации отображает изображения значков для всех типов (B1-B5). Таким образом, водитель может быть проинформирован, что никакое из действий, отличных от вождения, не допускается (S19).
[0049] Другие конфигурации и операции устройства 100 представления информации являются такими же, что и в первом варианте осуществления, и, следовательно, не описываются.
[0050] В качестве информации о допустимости действия, отличного от вождения, контроллер 14 представления информации представляет, в блоке 15 представления информации, информацию, указывающую действие, которое водителю не разрешается выполнять помимо вождения. Представление действия, которое водителю не разрешается выполнять помимо вождения, предоставляет возможность водителю понимать состояние системы, используемой для управления автономным вождением.
[0051] В качестве информации, указывающей действие, которое водителю не разрешается выполнять помимо вождения, контроллер 14 представления информации представляет, в блоке 15 представления информации, информацию, указывающую действие, отличное от вождения, время TT перехода на ручное управление для которого продолжительней времени TR достижения. Если действие, отличное от вождения, которое водитель выполняет, не представляется в блоке 15 представления информации, водитель может принимать управление и вести транспортное средство, прежде чем будет выполнено переключение от управления автономным вождением на управление ручным вождением.
[0052] Хотя настоящее изобретение было описано выше в данном документе с помощью вариантов осуществления, настоящее изобретение не ограничивается тем, что описано в этих вариантах осуществления, и может быть модифицировано и улучшено по-разному, как очевидно специалистам в области техники.
[0053] Например, контроллер 14 представления информации может представлять, в блоке 15 представления информации, как информацию, указывающую действие, которое водителю разрешается выполнять помимо вождения, так и информацию, указывающую действие, которое водителю не разрешается выполнять помимо вождения. В этом случае, база данных 17 времени перехода на ручное управление хранит изображения значков, указывающие действия, принадлежащие типам (A1-A5), показанным на фиг. 3, также как и изображения значков, указывающие действия, принадлежащие типам (B1-B5), показанным на фиг. 8. Контроллер 14 представления информации может отображать, в качестве действия, которое водителю разрешается выполнять помимо вождения, изображение значка, указывающее действие, отличное от вождения, принадлежащее любому из типов (A1-A5), время TT перехода на ручное управление для которого равно или короче времени TR достижения, и отображать, в качестве действия, которое водителю не разрешается выполнять помимо вождения, изображение значка, указывающее действие, отличное от вождения, принадлежащее к любому из типов (B1-B5), время TT перехода на ручное управление для которого продолжительней времени TR достижения.
СПИСОК ПОЗИЦИОННЫХ ОБОЗНАЧЕНИЙ
[0054]
13 блок вычисления уровня доверия к системе
14 контроллер представления информации
15 блок представления информации
16 блок оценки достижения
17 база данных времени перехода на ручное управление (блок хранения данных)
Изобретение относится к системам управления автономным транспортным средством. Устройство представления информации для использования в автономном транспортном средстве способно переключаться, на основе условий движения транспортного средства и внешних обстоятельств, между автономным управлением вождением и ручным управлением вождением. Устройство представления информации содержит блок вычисления уровня доверия к системе, блок представления информации и контроллер представления информации. Уровень доверия к системе указывает состояние системы управления при выполнении автономного управления вождением. Блок представления информации выполнен с возможностью представлять водителю информацию о допустимости действия, отличного от вождения. Контроллер представления информации выполнен с возможностью управлять переключением содержимого информации согласно результату сравнения уровня доверия к системе и предварительно определенного порогового значения. Достигается повышение комфорта управления автономным транспортным средством. 2 н. и 6 з.п. ф-лы, 13 ил. 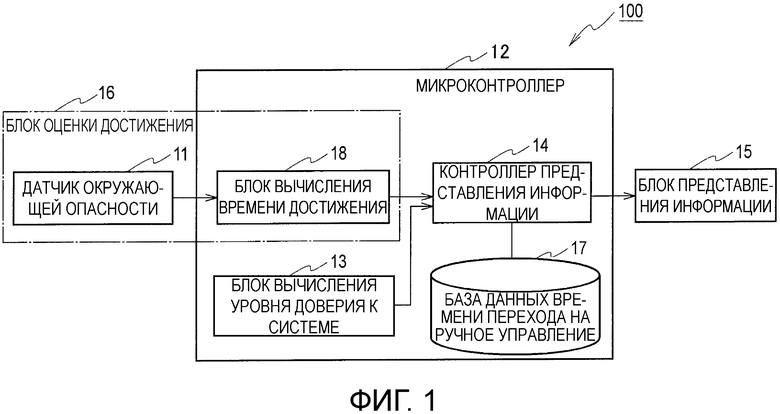
1. Устройство представления информации для использования в автономном транспортном средстве, способное переключаться, на основе условий движения транспортного средства и внешних обстоятельств транспортного средства, между управлением автономным вождением, в котором транспортное средство движется автономно, и управлением ручным вождением, в котором транспортное средство ведет водитель, устройство представления информации содержит:
блок вычисления уровня доверия к системе, выполненный с возможностью вычислять уровень доверия к системе, который указывает состояние системы управления при выполнении управления автономным вождением;
блок представления информации, выполненный с возможностью представлять водителю информацию о допустимости действия, отличного от вождения; и
контроллер представления информации, выполненный с возможностью управлять переключением содержимого информации, представленной в блоке представления информации, согласно результату сравнения между уровнем доверия к системе, вычисленным посредством блока вычисления уровня доверия к системе, и предварительно определенным пороговым значением.
2. Устройство представления информации по п. 1, в котором
в качестве информации о допустимости действия, отличного от вождения, контроллер представления информации представляет, в блоке представления информации, информацию, указывающую действие, которое водителю разрешается выполнять помимо вождения.
3. Устройство представления информации по п. 1 или 2, в котором
в качестве информации о допустимости действия, отличного от вождения, контроллер представления информации представляет, в блоке представления информации, информацию, указывающую действие, которое водителю не разрешается выполнять помимо вождения.
4. Устройство представления информации по п. 1 или 2, в котором
блок вычисления уровня доверия к системе вычисляет уровень доверия к системе на основе по меньшей мере одного из коэффициента обнаружения датчика, используемого для управления автономным вождением, коэффициента нагрузки центрального процессора, используемого для управления автономным вождением, и точности пути к вычисленному результату целевого значения.
5. Устройство представления информации по п. 1 или 2, дополнительно содержащее:
блок оценки достижения, выполненный с возможностью оценивать время достижения, которое является временем, требуемым, чтобы транспортное средство достигло окружающей опасности; и
хранилище данных, выполненное с возможностью хранить время перехода на ручное управление, которое является временем, требуемым для водителя, который выполняет действие, отличное от вождения, чтобы принять управление и вести транспортное средство, время перехода на ручное управление хранится для каждого действия, отличного от вождения, при этом
контроллер представления информации определяет информацию для представления водителю, сравнивая время достижения, оцененное посредством блока оценки достижения, и время перехода на ручное управление, сохраненное в хранилище данных.
6. Устройство представления информации по п. 5, в котором
информация о допустимости действия, отличного от вождения, включает в себя информацию, указывающую действие, которое водителю разрешается выполнять помимо вождения,
в качестве информации, указывающей действие, которое водителю разрешается выполнять помимо вождения, контроллер представления информации представляет, в блоке представления информации, информацию, указывающую действие, отличное от вождения, время перехода на ручное управление для которого равно или короче времени достижения.
7. Устройство представления информации по п. 5, в котором
информация о допустимости действия, отличного от вождения, включает в себя информацию, указывающую действие, которое водителю не разрешается выполнять помимо вождения,
в качестве информации, указывающей действие, которое водителю не разрешается выполнять помимо вождения, контроллер представления информации представляет, в блоке представления информации, информацию, указывающую действие, отличное от вождения, время перехода на ручное управление для которого продолжительней времени достижения.
8. Способ представления информации, применяемый к автономному транспортному средству, способному переключаться, на основе условий движения транспортного средства и внешних обстоятельств транспортного средства, между управлением автономным вождением, в котором транспортное средство движется автономно, и управлением ручным вождением, в котором транспортное средство ведет водитель, способ представления информации содержит этапы, на которых:
вычисляют уровень доверия к системе, который указывает состояние системы управления при выполнении управления автономным вождением;
представляют водителю информацию о допустимости действия, отличного от вождения; и
управляют переключением содержимого представленной информации согласно результату сравнения между вычисленным уровнем доверия к системе и предварительно определенным пороговым значением.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| JP 2007010441 A, 18.01.2007 | |||
| RU 2011123376 A, 20.12.2012. | |||

