Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству помощи при вождении и к способу помощи при вождении для помощи транспортному средству при вождении.
Уровень техники
[0002] Когда транспортное средство, имеющее датчик для обнаружения объекта на передней стороне, проезжает по противоположной полосе движения таким образом, что оно поворачивает направо или налево на перекрестке, мертвая зона датчика может возникать в противоположной полосе движения в то время, когда транспортное средство ожидает правого или левого поворота, вследствие встречного транспортного средства, ожидающего поворота направо или налево в противоположной полосе движения. Раскрыто устройство помощи при вождении для решения этой проблемы, которое уведомляет водителя в отношении риска поворота направо или налево вследствие встречного транспортного средства, ожидающего поворота направо или налево в противоположной полосе движения, в зависимости от степени мертвой зоны датчика (см. патентный документ 1).
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация не прошедшей экспертизу заявки на патент (Япония) номер 2011-090582.
Сущность изобретения
[0004] Тем не менее, способ помощи транспортному средству в повороте направо или налево, как раскрыто в патентном документе 1, просто уведомляет водителя в отношении риска правого или левого поворота и не позволяет предлагать позицию остановки при правом или левом повороте с учетом мертвой зоны вследствие встречного транспортного средства, ожидающего поворота направо или налево в противоположной полосе движения.
[0005] В связи с вышеизложенным, цель настоящего изобретения заключается в том, чтобы предоставлять устройство помощи при вождении и способ помощи при вождении, допускающие направление транспортного средства таким образом, чтобы ожидать поворота направо или налево в позиции исходя из риска и эффективности правого или левого поворота.
[0006] Устройство помощи при вождении согласно первому аспекту настоящего изобретения обнаруживает объект перед транспортным средством посредством модуля обнаружения объектов, обнаруживает информацию правого/левого поворота, указывающую то, что транспортное средство проезжает по противоположной полосе движения таким образом, что оно поворачивает направо или налево на перекрестке после предварительно определенного периода времени, на основе текущей позиции и маршрута движения транспортного средства, включенных в информацию дороги, определяет то, присутствует или нет транспортное средство в состоянии готовности, ожидающее поворота направо или налево в противоположной полосе движения, на перекрестке согласно результату обнаружения модуля обнаружения объектов и информации дороги, когда информация правого/левого поворота обнаруживается, оценивает мертвую зону модуля обнаружения объектов в противоположной полосе движения, возникающую за счет транспортного средства в состоянии готовности, и задает область готовности, в которой транспортное средство ожидает поворота направо или налево, на основе оцененной мертвой зоны.
Краткое описание чертежей
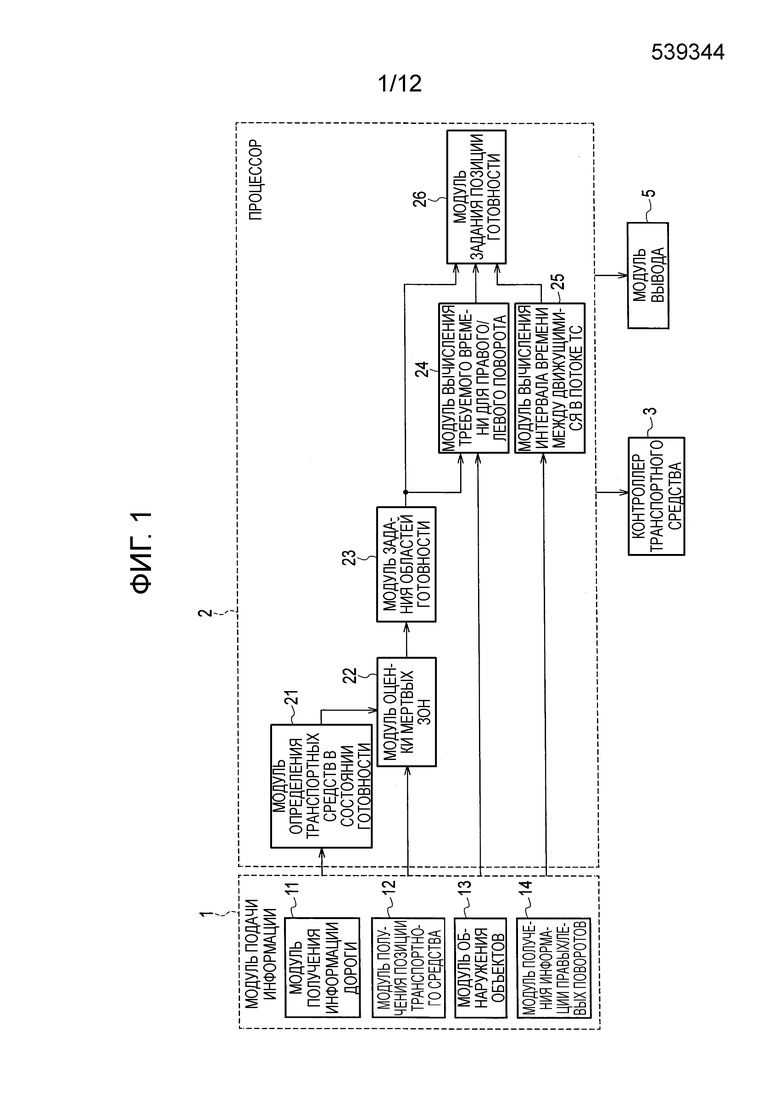
[0007] Фиг. 1 является блок-схемой для описания фундаментальной конфигурации устройства помощи при вождении согласно первому варианту осуществления настоящего изобретения.
Фиг. 2 является принципиальной блок-схемой для описания фундаментальной конфигурации транспортного средства, оснащенного устройством помощи при вождении согласно первому варианту осуществления настоящего изобретения.
Фиг. 3 является блок-схемой последовательности операций способа для описания работы устройства помощи при вождении согласно первому варианту осуществления настоящего изобретения.
Фиг. 4 является видом для описания работы устройства помощи при вождении согласно первому варианту осуществления настоящего изобретения.
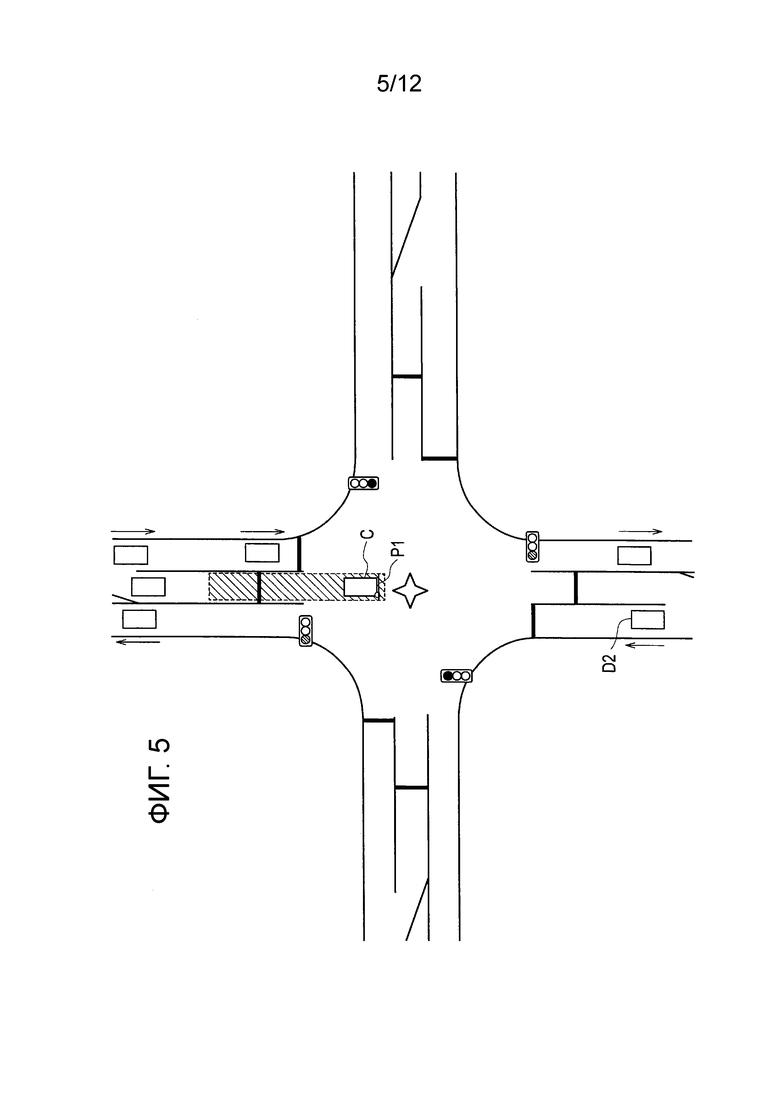
Фиг. 5 является видом для описания работы устройства помощи при вождении согласно первому варианту осуществления настоящего изобретения.
Фиг. 6 является видом для описания работы устройства помощи при вождении согласно первому варианту осуществления настоящего изобретения.
Фиг. 7 является видом для описания работы устройства помощи при вождении согласно первому варианту осуществления настоящего изобретения.
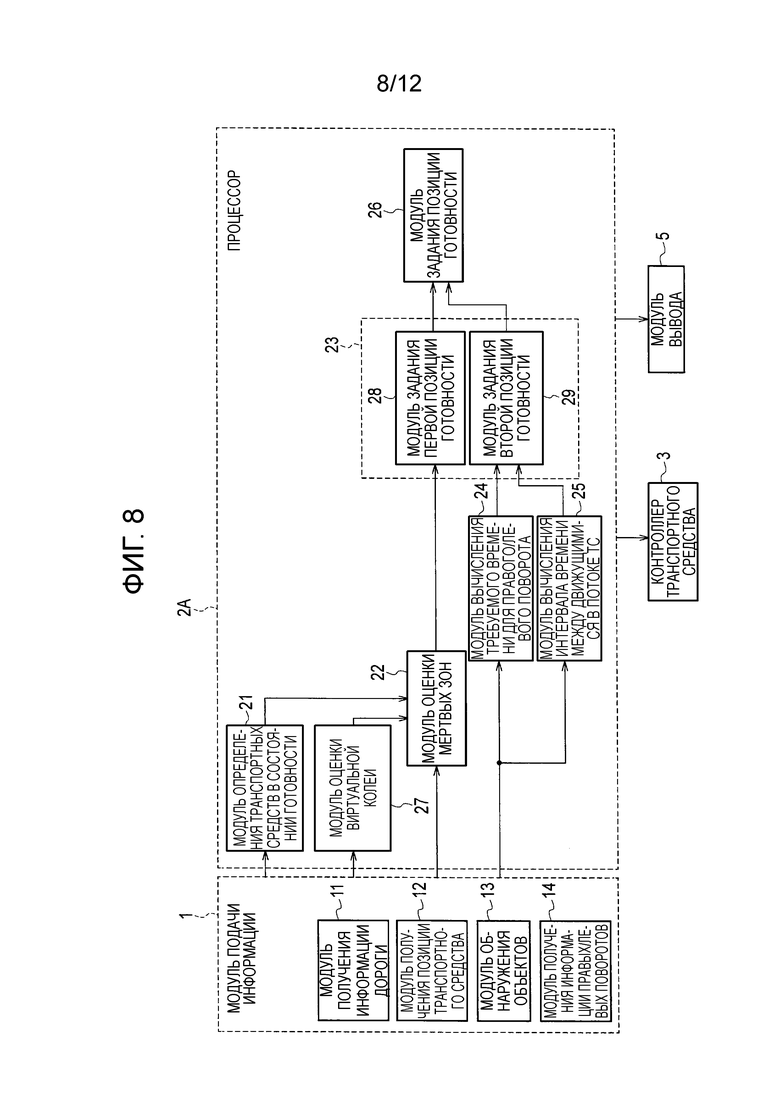
Фиг. 8 является блок-схемой для описания фундаментальной конфигурации устройства помощи при вождении согласно второму варианту осуществления настоящего изобретения.
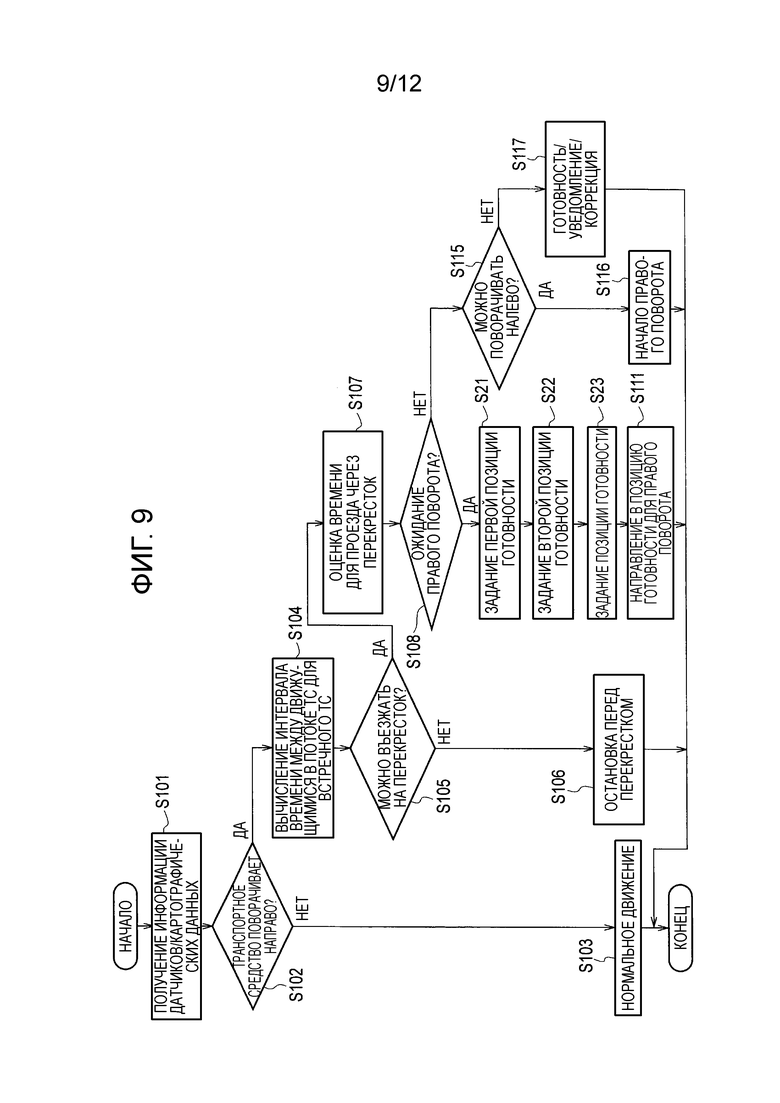
Фиг. 9 является блок-схемой последовательности операций способа для описания работы устройства помощи при вождении согласно второму варианту осуществления настоящего изобретения.
Фиг. 10 является блок-схемой последовательности операций способа для подробного описания процесса на этапе S21 на блок-схеме последовательности операций способа по фиг. 9.
Фиг. 11 является видом для описания работы устройства помощи при вождении согласно второму варианту осуществления настоящего изобретения.
Фиг. 12 является видом для описания модели руления на основе принципа Аккермана.
Подробное описание вариантов осуществления
[0008] Далее описываются первый и второй варианты осуществления настоящего изобретения со ссылками на чертежи. Идентичные или аналогичные элементы на чертежах обозначены посредством идентичных или аналогичных ссылок с номерами, и перекрывающиеся пояснения опускаются в данном документе.
[0009] Первый вариант осуществления
Как показано на фиг. 1, устройство помощи при вождении согласно первому варианту осуществления настоящего изобретения включает в себя модуль 1 подачи информации, процессор 2, в который подаются различные виды информации из модуля 1 подачи информации, с тем чтобы выполнять обработку, необходимую для операций устройства помощи при вождении, контроллер 3 транспортного средства и модуль 5 вывода. Как показано на фиг. 2, устройство помощи при вождении согласно первому варианту осуществления устанавливается в транспортном средстве C и помогает транспортному средству C при вождении при повороте направо или налево. Транспортное средство C может представлять собой либо автономное транспортное средство, которое автономно движется по заданному маршруту движения, либо транспортное средство, движущееся за счет действий водителя.
[0010] Модуль 1 подачи информации включает в себя модуль 11 получения информации дороги, модуль 12 получения позиции транспортного средства, модуль 13 обнаружения объектов и модуль 14 получения информации правых/левых поворотов. Модуль 11 получения информации дороги получает информацию дороги, так что транспортное средство C может следовать по дороге для движения, и выводит информацию в процессор 2. Модуль 11 получения информации дороги представляет собой, например, автомобильное навигационное устройство, которое сохраняет цифровую карту в качестве информации дороги. Информация дороги включает в себя ширину дороги, радиус кривизны, размер перекрестка, число полос движения, тип дороги и допустимое ограничение скорости.
[0011] Модуль 12 получения позиции транспортного средства получает текущую позицию транспортного средства C согласно информации дороги, полученной посредством модуля 11 получения информации дороги. Модуль 12 получения позиции транспортного средства включает в себя устройство 121 позиционирования, такое как глобальная система позиционирования (GPS), гиродатчик 122, датчик 123 угла поворота при рулении и датчик 124 скорости. Модуль 12 получения позиции транспортного средства дополняет информацию позиции, полученную посредством устройства 121 позиционирования, согласно результатам обнаружения датчиков распознавания окрестностей, таких как гиродатчик 122, датчик 123 угла поворота при рулении, датчик 124 скорости и камера, с тем чтобы распознавать дополненную позицию в качестве текущей позиции транспортного средства C.
[0012] Модуль 13 обнаружения объектов обнаруживает объекты перед транспортным средством C. Модуль 13 обнаружения объектов представляет собой, например, датчик распознавания окрестностей, такой как лазерный дальномер, реализующий угловую разрешающую способность и разрешающую способность по дальности. Модуль 13 обнаружения объектов может включать в себя один или более модулей обнаружения для обнаружения объектов не только перед транспортным средством C, но также и в окрестности транспортного средства C, или может включать в себя датчик распознавания окрестностей, такой как камера.
[0013] Модуль 14 получения информации правых/левых поворотов обнаруживает информацию правого/левого поворота, указывающую то, что транспортное средство C проезжает по противоположной полосе движения таким образом, что оно поворачивает направо или налево на перекрестке после предварительно определенного периода времени, на основе текущей позиции и маршрута движения транспортного средства C, включенных в информацию дороги, полученную посредством модуля 11 получения информации дороги. Модуль 14 обнаружения информации правых/левых поворотов может представлять собой автомобильное навигационное устройство, идентичное модулю 11 получения информации дороги. В автомобильном навигационном устройстве, маршрут движения предварительно задается на цифровой карте в качестве информации дороги пользователем. Модуль 14 получения информации правых/левых поворотов может обнаруживать информацию правого/левого поворота согласно указателю поворота, управляемому водителем.
[0014] Процессор 2 включает в себя модуль 21 определения транспортных средств в состоянии готовности, модуль 22 оценки мертвых зон, модуль 23 задания областей готовности, модуль 24 вычисления требуемого времени для правого/левого поворота, модуль 25 вычисления интервала времени между движущимися в потоке транспортными средствами и модуль 26 задания позиции готовности. Соответствующие элементы, составляющие процессор 2, указываются в качестве логических структур и могут реализовываться в аппаратных средствах неразъемно или независимо.
[0015] Когда модуль 14 обнаружения информации правых/левых поворотов обнаруживает информацию правого/левого поворота, модуль 21 определения транспортных средств в состоянии готовности определяет то, присутствует или нет транспортное средство в состоянии готовности, ожидающее правого или левого поворота в противоположной полосе движения, на перекрестке, включенном в информацию правого/левого поворота. Модуль 21 определения транспортных средств в состоянии готовности определяет то, присутствует или нет транспортное средство в состоянии готовности, согласно результату обнаружения модуля 13 обнаружения объектов и информации дороги, полученной посредством модуля 11 получения информации дороги. Модуль 21 определения транспортных средств в состоянии готовности распознает транспортное средство в состоянии готовности, на основе текущей позиции транспортного средства C, так что результат обнаружения модуля 13 обнаружения объектов размечается на цифровой карте модуля 11 получения информации дороги.
[0016] Модуль 22 оценки мертвых зон оценивает мертвую зону модуля 13 обнаружения объектов, которая может возникать вследствие транспортного средства в состоянии готовности и т.п. в противоположной полосе движения, обнаруженного посредством модуля 21 определения транспортных средств в состоянии готовности. Модуль 23 задания областей готовности задает область готовности, необходимую для обнаружения противоположной полосы движения посредством модуля 13 обнаружения объектов при ожидании правого или левого поворота, таким образом, что транспортное средство C может безопасно поворачивать направо или налево, на основе мертвой зоны, оцененной посредством модуля 22 оценки мертвых зон.
[0017] Модуль 24 вычисления требуемого времени для правого/левого поворота вычисляет каждое требуемое время Tb, в течение которого транспортное средство C начинается и завершает поворот направо или налево в каждой позиции в допустимой области готовности, в которой транспортное средство C может ожидать поворота направо или налево, на основе информации дороги, полученной посредством модуля 11 получения информации дороги. Допустимая область готовности представляет собой, например, область, заданную между позицией, в которой транспортное средство C может останавливаться перед стоп-линией на перекрестке, и практически серединой перекрестка. Модуль 24 вычисления требуемого времени для правого/левого поворота вычисляет требуемое время Tb в зависимости от размера перекрестка, включенного в информацию правого/левого поворота, обнаруженную посредством модуля 14 обнаружения информации правых/левых поворотов, и кривизны поворота транспортного средства C. Требуемое время Tb является периодом времени, в течение которого транспортное средство C начинает поворот направо или налево и достигает позиции, не препятствующей движению объектов (других транспортных средств) на перекрестке.
[0018] Модуль 25 вычисления интервала времени между движущимися в потоке транспортными средствами вычисляет интервал Ta времени между движущимися в потоке транспортными средствами (THW) между едущими по прямой транспортными средствами в противоположной полосе движения посредством времени, в которое транспортное средство C въезжает на перекресток, включенный в информацию правого/левого поворота, обнаруженную посредством модуля 14 обнаружения информации правых/левых поворотов. Интервал Ta времени между движущимися в потоке транспортными средствами соответствует интенсивности движения в противоположной полосе движения. Модуль 25 вычисления интервала времени между движущимися в потоке транспортными средствами вычисляет, в качестве интервала Ta времени между движущимися в потоке транспортными средствами, период времени, в течение которого едущее по прямой транспортное средство в противоположной полосе движения проезжает через предварительно определенную точку на перекрестке, и едущее сзади транспортное средство проезжает через идентичную точку, либо среднее значение или минимальное значение времен, в течение которых едущее по прямой транспортное средство перемещается на предварительно определенное расстояние на перекрестке. Модуль 25 вычисления интервала времени между движущимися в потоке транспортными средствами распознает позицию едущих по прямой транспортных средств в противоположной полосе движения, на основе текущей позиции транспортного средства C, так что результат обнаружения модуля 13 обнаружения объектов размечается на цифровой карте модуля 11 получения информации дороги.
[0019] Модуль 26 задания позиции готовности задает позицию готовности, в которой транспортное средство C ожидает поворота направо или налево в области готовности, заданной посредством модуля 23 задания областей готовности, согласно требуемому времени Tb, вычисленному посредством модуля 24 вычисления требуемого времени для правого/левого поворота, и интервалу Ta времени между движущимися в потоке транспортными средствами, вычисленному посредством модуля 25 вычисления интервала времени между движущимися в потоке транспортными средствами. Модуль 26 задания позиции готовности задает позицию готовности, например, таким образом, что требуемое время Tb аппроксимируется как интервал Ta времени между движущимися в потоке транспортными средствами.
[0020] Как показано на фиг. 2, контроллер 3 транспортного средства включает в себя модуль 31 приведения в движение, который обеспечивает движение транспортного средства C в прямом и обратном направлениях, тормоз 32, который замедляет транспортное средство C, и электромотор 33 электроусилителя руля (EPS), который изменяет направления движения транспортного средства C. Модуль 31 приведения в движение включает в себя, например, электромотор для вращения колес 42 и инвертор для приведения в действие электромотора. EPS-электромотор 33 работает согласно повороту руля 41, с тем чтобы изменять направления передних колес 42. Проиллюстрированная конфигурация контроллера 3 транспортного средства является просто примером и может представлять собой любую конфигурацию, включающую в себя, например, модуль 31 приведения в движение, служащий в качестве двигателя внутреннего сгорания, и EPS-электромотор 33, служащий в качестве гидравлической системы.
[0021] Модуль 5 вывода уведомляет пользователя относительно различных видов информации в зависимости от управления процессором 2. Модуль 5 вывода представляет собой, например, устройство отображения для отображения световых индикаторов, изображений и символов либо устройство вывода, такое как динамик для вывода звука.
[0022] Способ помощи при вождении
Ниже описывается пример способа помощи при вождении посредством устройства помощи при вождении согласно первому варианту осуществления со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 3. Пример, описанный ниже, является случаем, в котором транспортное средство C, оснащенное устройством помощи при вождении согласно первому варианту осуществления, создает маршрут движения в пункт назначения, заданный в автомобильном навигационном устройстве пользователем, и транспортное средство C проезжает через перекресток таким образом, что оно поворачивает направо по маршруту движения. Хотя ниже приводится случай, в котором транспортное средство C придерживается правил дорожного движения для левостороннего движения, способ также может быть применимым к примеру, в котором транспортное средство проезжает через перекресток таким образом, что оно поворачивает налево в случае придерживания правил дорожного движения для правостороннего движения.
[0023] На этапе S101 процессор 2 получает, с предварительно определенными периодами дискретизации, текущую позицию транспортного средства C, включенную в информацию дороги, из модуля 12 получения позиции транспортного средства и результат обнаружения модуля 13 обнаружения объектов.
[0024] На этапе S102 определяется то, обнаруживает или нет модуль 14 обнаружения информации правых/левых поворотов информацию правого/левого поворота, указывающую то, что транспортное средство C проезжает по противоположной полосе движения таким образом, что оно поворачивает направо на перекрестке после предварительно определенного периода времени. Процесс переходит к этапу S103, когда информация правого/левого поворота не обнаруживается, и процесс переходит к этапу S104, когда информация правого/левого поворота обнаруживается. На этапе S103, транспортное средство C поддерживает нормальное движение, и процесс возвращается к этапу S101.
[0025] На этапе S104 модуль 25 вычисления интервала времени между движущимися в потоке транспортными средствами вычисляет интервал Ta времени между движущимися в потоке транспортными средствами между едущими по прямой транспортными средствами в противоположной полосе движения согласно информации дороги, текущей позиции транспортного средства C и результату обнаружения модуля 13 обнаружения объектов. Например, транспортное средство D2 и транспортное средство D3, показанные на фиг. 4, соответствуют едущим по прямой транспортным средствам в противоположной полосе движения, встречной относительно транспортного средства C. Модуль 25 вычисления интервала времени между движущимися в потоке транспортными средствами вычисляет, в качестве интервала Ta времени между движущимися в потоке транспортными средствами, период времени, в течение которого транспортное средство D2 проезжает через предварительно определенную точку на перекрестке, и транспортное средство D3 затем проезжает через идентичную точку.
[0026] На этапе S105 процессор 2 определяет то, может или нет транспортное средство C въезжать на перекресток. Согласно модулю 13 обнаружения объектов, служащему в качестве модуля обнаружения сигналов, такому как камера, для обнаружения светофора на перекрестке и сигнала, указываемого посредством светофора, процессор 2, определяет то, что транспортное средство C может въезжать на перекресток, когда сигнал указывает то, что транспортному средству C разрешается въезжать, и когда помехи не присутствуют перед транспортным средством C. Процесс переходит к этапу S106, когда транспортному средству C не разрешается въезжать на перекресток, и процесс переходит к этапу S107, когда транспортному средству C разрешается въезжать на перекресток.
[0027] На этапе S106 процессор 2 приводит транспортное средство C к стоп-линии, которая является граничной линией на перекрестке, как показано на фиг. 4, так что транспортное средство C останавливается перед стоп-линией, и процесс переходит к этапу S101. Когда транспортное средство C представляет собой автономное транспортное средство, процессор 2 управляет контроллером 3 транспортного средства таким образом, чтобы командовать транспортному средству C останавливаться перед стоп-линией. Когда транспортное средство C представляет собой транспортное средство, движущееся за счет действий водителя, процессор 2 направляет водителя таким образом, чтобы останавливать транспортное средство C перед стоп-линией посредством звука или изображения через модуль 5 вывода. Процессор 2 может останавливать движущееся транспортное средство C перед стоп-линией через тормоз 32.
[0028] На этапе S107 модуль 24 вычисления требуемого времени для правого/левого поворота вычисляет требуемое время Tbx из каждой позиции x в качестве предварительной позиции готовности с предварительно определенными интервалами в направлении движения (направлении по оси X) транспортного средства C в допустимой области R1 готовности, как показано на фиг. 4. Например, когда позиция, в которой транспортное средство C останавливается на стоп-линии, задается как x=0, и позиция, в которой транспортное средство C достигает практически середины перекрестка, задается как x=A, предварительно определенное время Tbx (x=0-A) составляет каждый период времени, в течение которого транспортное средство C начинает поворот направо в каждой позиции x и достигает позиции, не препятствующей проезду других транспортных средств через перекресток. Транспортное средство C предположительно должно останавливаться в каждой позиции x в допустимой области R1 готовности при поддержании прямого положения в направлении движения. Позиция завершения правого поворота, в которой транспортное средство C не препятствует проезду других транспортных средств через перекресток, представляет собой, например, позицию транспортного средства C, указываемую посредством пунктирной линии на фиг. 4. Когда имеются несколько полос движения на стороне после завершения поворота направо, позиция завершения правого поворота, которую следует достигать, может представлять собой крайнюю левую полосу движения или может изменяться надлежащим образом в зависимости от условий движения.
[0029] На этапе S108 процессор 2 определяет то, ожидает или нет транспортное средство C поворота направо в позиции готовности, заданной посредством модуля 26 задания позиции готовности. Процесс переходит к этапу S109, когда транспортное средство C находится в состоянии готовности, и процесс переходит к этапу S115, когда транспортное средство C не находится в состоянии готовности.
[0030] На этапе S109 модуль 21 определения транспортных средств в состоянии готовности определяет то, присутствует или нет транспортное средство в состоянии готовности, ожидающее поворота направо в противоположной полосе движения, на перекрестке. Например, как показано на фиг. 4, транспортное средство D1 соответствует транспортному средству в состоянии готовности, останавливающемуся на перекрестке. Процесс переходит к этапу S110, когда нет транспортного средства в состоянии готовности, и процесс переходит к этапу S112, когда имеется транспортное средство в состоянии готовности.
[0031] На этапе S110, как показано на фиг. 5, модуль 26 задания позиции готовности задает позицию P1 готовности, в которой транспортное средство C ожидает поворота направо, на основе интервала Ta времени между движущимися в потоке транспортными средствами и каждого требуемого времени Tbx, вычисленного на этапе S104 и этапе S107, соответственно. Модуль 26 задания позиции готовности задает, в качестве позиции P1 готовности, предварительную позицию готовности, в которой требуемое время Tbx аппроксимируется как интервал Ta времени между движущимися в потоке транспортными средствами в допустимой области R1 готовности.
[0032] На этапе S111 модуль 26 задания позиции готовности приводит транспортное средство C к позиции P1 готовности, и процесс возвращается к этапу S101. Когда транспортное средство C представляет собой автономное транспортное средство, модуль 26 задания позиции готовности управляет контроллером 3 транспортного средства таким образом, чтобы командовать транспортному средству C останавливаться в позиции P1 готовности. Когда транспортное средство C представляет собой транспортное средство, движущееся за счет действий водителя, модуль 26 задания позиции готовности направляет водителя таким образом, чтобы останавливать транспортное средство C в позиции P1 готовности, через модуль 5 вывода. Модуль 26 задания позиции готовности может останавливать движущееся транспортное средство C в позиции P1 готовности через тормоз 32.
[0033] На этапе S112 модуль 22 оценки мертвых зон оценивает мертвую зону модуля 13 обнаружения объектов, в каждой позиции в допустимой области R1 готовности, вследствие транспортного средства в состоянии готовности в противоположной полосе движения, обнаруженного посредством модуля 21 определения транспортных средств в состоянии готовности. Например, как показано на фиг. 6, модуль 22 оценки мертвых зон оценивает мертвую зону модуля 13 обнаружения объектов вследствие транспортного средства D1, которое представляет собой транспортное средство в состоянии готовности. Модуль 22 оценки мертвых зон обнаруживает позицию транспортного средства в состоянии готовности согласно информации дороги, текущей позиции транспортного средства C и результату обнаружения модуля 13 обнаружения объектов, с тем чтобы разметить позиции транспортного средства C и транспортного средства в состоянии готовности на цифровой карте. В примере, показанном на фиг. 6, мертвая зона возникает на противоположной полосе движения справа от линии L1, соединяющей модуль 13 обнаружения объектов и край транспортного средства D1. Модуль 22 оценки мертвых зон может оценивать мертвую зону согласно наблюдаемому полю зрения и угловой разрешающей способности и разрешающей способности по дальности модуля 13 обнаружения объектов.
[0034] Модуль 22 оценки мертвых зон оценивает мертвую зону в каждой позиции в допустимой области R1 готовности в направлении по оси X и направлении по оси Y (направлении справа-налево транспортного средства C), ортогональном к направлению по оси X. Например, когда транспортное средство C направляется через тормоз 32 или модуль 5 вывода, модуль 22 оценки мертвых зон может оценивать мертвую зону в каждой позиции в направлении по оси X при ограничении позицией транспортного средства C в направлении по оси Y на стоп-линии. Когда транспортное средство C автономно направляется, модуль 22 оценки мертвых зон может оценивать мертвую зону в каждой позиции в направлении по оси X при ограничении позицией транспортного средства C в направлении по оси Y ближе к противоположной полосе движения в полосе движения, с тем чтобы обеспечивать лучшую видимость. Даже когда транспортное средство C направляется через тормоз 32 или модуль 5 вывода, модуль 22 оценки мертвых зон может оценивать мертвую зону в каждой позиции в направлении по оси X при ограничении позицией транспортного средства C в направлении по оси Y ближе к противоположной полосе движения в полосе движения, так что транспортное средство C направляется посредством модуля 5 вывода в позицию в полосе движения ближе к противоположной полосе движения. Каждая позиция в направлении по оси X, используемая для оценки мертвой зоны посредством модуля 22 оценки мертвых зон, представляет собой каждую позицию, используемую для вычисления требуемого времени Tbx на этапе S107.
[0035] Например, как показано на фиг. 6, когда транспортное средство D1, ожидающее поворота направо, присутствует в противоположной полосе движения, мертвая зона является меньшей, но требуемое время Tbx, необходимое для правого поворота, является большим по мере того, как позиция транспортного средства C, ожидающего поворота направо, становится дальше от перекрестка, тогда как требуемое время Tbx является меньшим, но мертвая зона является большей по мере того, как позиция транспортного средства C становится ближе к середине перекрестка.
[0036] На этапе S113, как показано на фиг. 7, модуль 23 задания областей готовности задает, в допустимой области R1 готовности, область R2 готовности, в которой транспортное средство C может в достаточной степени выезжать на расстояние до противоположной полосы движения в то время, когда транспортное средство C ожидает поворота направо, на основе мертвой зоны, оцененной посредством модуля 22 оценки мертвых зон. Область R2 готовности представляет собой, например, такую область, что модуль 13 обнаружения объектов может обнаруживать расстояние до противоположной полосы движения, которая должна наблюдаться. Модуль 23 задания областей готовности определяет расстояние до противоположной полосы движения, которая должна наблюдаться, согласно допустимому ограничению скорости в противоположной полосе движения, включенному в информацию дороги.
[0037] На этапе S114 модуль 26 задания позиции готовности задает позицию P1 готовности, в которой транспортное средство C ожидает поворота направо, на основе интервала Ta времени между движущимися в потоке транспортными средствами и каждого требуемого времени Tbx, вычисленного на этапе S104 и этапе S107, соответственно. Модуль 26 задания позиции готовности задает, в качестве позиции P1 готовности, предварительную позицию готовности, в которой требуемое время Tbx аппроксимируется как интервал Ta времени между движущимися в потоке транспортными средствами в области R2 готовности, и процесс переходит к этапу S111.
[0038] На этапе S115 процессор 2 определяет то, может или нет транспортное средство C поворачивать направо в позиции готовности, заданной посредством модуля 26 задания позиции готовности, согласно информации дороги, текущей позиции транспортного средства C и результату обнаружения модуля 13 обнаружения объектов. Например, процессор 2 определяет то, может или нет транспортное средство C поворачивать направо, посредством определения того, достигает или нет едущее по прямой транспортное средство в противоположной полосе движения, ближайшей к перекрестку, перекрестка в пределах требуемого времени Tbx из позиции готовности транспортного средства C, согласно позиции едущего по прямой транспортного средства в противоположной полосе движения и допустимого ограничения скорости в противоположной полосе движения. Процесс переходит к этапу S116, когда транспортное средство C может поворачивать направо, и процесс переходит к этапу S117, когда транспортное средство не может поворачивать направо.
[0039] На этапе S116 процессор 2 направляет транспортное средство C таким образом, чтобы начинать поворот направо, и процесс возвращается к этапу S101. Когда транспортное средство C представляет собой автономное транспортное средство, процессор 2 управляет контроллером 3 транспортного средства таким образом, чтобы командовать транспортному средству C начинать поворот направо. Когда транспортное средство C представляет собой транспортное средство, движущееся за счет действий водителя, процессор 2 направляет водителя таким образом, чтобы начинать поворот направо, посредством звука или изображения через модуль 5 вывода.
[0040] На этапе S117 процессор 2 заставляет транспортное средство C ожидать в позиции P1 готовности. Дополнительно, на этапе S117, когда модуль 22 оценки мертвых зон определяет то, что мертвая зона, оцененная в позиции P1 готовности, ухудшена вследствие транспортного средства в состоянии готовности и т.п., обнаруженного посредством модуля 21 определения транспортных средств в состоянии готовности, модуль 22 оценки мертвых зон может уведомлять водителя в отношении того, что мертвая зона ухудшена, через модуль 5 вывода, с тем чтобы вынуждать водителя обеспечивать поле зрения. Когда транспортное средство C представляет собой автономное транспортное средство, процессор 2 может передавать полномочия по управлению водителю.
[0041] Дополнительно, на этапе S117, когда модуль 13 обнаружения объектов, служащий в качестве модуля обнаружения едущих сзади транспортных средств, обнаруживает едущее сзади транспортное средство, модуль 26 задания позиции готовности может выполнять коррекцию, чтобы последовательно изменять позицию P1 готовности к середине перекрестка в области R2 готовности в зависимости от истекшего времени готовности. Помимо этого, на этапе S117, модуль 26 задания позиции готовности может выполнять коррекцию, чтобы последовательно изменять позицию P1 готовности к середине перекрестка в области R2 готовности до тех пор, пока не изменится сигнал, обнаруженный посредством модуля 13 обнаружения объектов, служащего в качестве модуля обнаружения сигналов.
[0042] Устройство помощи при вождении согласно первому варианту осуществления задает область R2 готовности с учетом мертвой зоны модуля 13 обнаружения объектов, возникающей на противоположной полосе движения, обращенной к транспортному средству C, с тем чтобы направлять транспортное средство C таким образом, чтобы ожидать поворота направо или налево в позиции исходя из риска и эффективности правого или левого поворота.
[0043] Устройство помощи при вождении согласно первому варианту осуществления задает позицию P1 готовности на основе интервала Ta времени между движущимися в потоке транспортными средствами между едущими по прямой транспортными средствами в противоположной полосе движения и требуемого времени Tb, необходимого для поворота направо или налево, с тем чтобы направлять транспортное средство C таким образом, чтобы ожидать поворота направо или налево в позиции, определенной с учетом интенсивности движения в противоположной полосе движения.
[0044] Устройство помощи при вождении согласно первому варианту осуществления вычисляет требуемое время Tb, необходимое для поворота направо или налево, в зависимости от размера перекрестка, с тем чтобы направлять транспортное средство C таким образом, чтобы ожидать поворота направо или налево в позиции, варьирующейся в зависимости от типа перекрестка, к примеру, несколько полос движения.
[0045] Устройство помощи при вождении согласно первому варианту осуществления задает позицию P1 готовности таким образом, что интервал Ta времени между движущимися в потоке транспортными средствами аппроксимируется к требуемому времени Tb, с тем чтобы дополнительно повышать эффективность правого поворота с учетом риска.
[0046] Устройство помощи при вождении согласно первому варианту осуществления оценивает мертвую зону на основе угловой разрешающей способности модуля 13 обнаружения объектов и позиции транспортного средства в состоянии готовности, с тем чтобы выполнять оценку мертвой зоны с высокой точностью относительно фактической мертвой зоны.
[0047] Устройство помощи при вождении согласно первому варианту осуществления уведомляет пользователя в отношении того, что оцененная мертвая зона ухудшена, с тем чтобы снижать риск начала правого поворота с увеличенной мертвой зоной.
[0048] Устройство помощи при вождении согласно первому варианту осуществления постепенно изменяет позицию P1 готовности к середине перекрестка, когда едущее сзади транспортное средство присутствует, с тем чтобы уменьшать дискомфорт едущего сзади транспортного средства.
[0049] Устройство помощи при вождении согласно первому варианту осуществления постепенно изменяет позицию P1 готовности к середине перекрестка при ожидании изменения индикатора светофора на перекрестке, так что оно плавно поворачивает направо или налево, с расчетом на последующее действие встречного транспортного средства в противоположной полосе движения при изменении индикатора светофора.
[0050] Второй вариант осуществления
Устройство помощи при вождении согласно второму варианту осуществления отличается от устройства помощи при вождении по первому варианту осуществления в том, что процессор 2A дополнительно включает в себя модуль 27 оценки виртуальной колеи, модуль 28 задания первой позиции готовности и модуль 29 задания второй позиции готовности, как показано на фиг. 8. Другие элементы во втором варианте осуществления являются практически идентичными элементам в первом варианте осуществления, и перекрывающиеся пояснения не повторяются ниже.
[0051] Модуль 27 оценки виртуальной колеи оценивает виртуальную колею, по которой встречное транспортное средство в противоположной полосе движения поворачивает направо или налево, в зависимости от размера перекрестка, например, когда модуль 14 обнаружения информации правых/левых поворотов обнаруживает информацию правого/левого поворота. Модуль 22 оценки мертвых зон оценивает виртуальную мертвую зону модуля 13 обнаружения объектов, возникающую на противоположной полосе движения, согласно виртуальной колее, оцененной посредством модуля 27 оценки виртуальной колеи, и угловой разрешающей способности модуля 13 обнаружения объектов.
[0052] Модуль 28 задания первой позиции готовности задает, в допустимой области R1 готовности, первую позицию готовности, в которой транспортное средство C может в достаточной степени наблюдать противоположную полосу движения, на основе виртуальной мертвой зоны, оцененной посредством модуля 22 оценки мертвых зон. Модуль 29 задания второй позиции готовности задает, в допустимой области R1 готовности, вторую позицию готовности ближе к середине перекрестка, чем первая позиция готовности, заданная посредством модуля 28 задания первой позиции готовности. Модуль 26 задания позиции готовности задает позицию готовности, в которой транспортное средство C ожидает поворота направо или налево, между первой позицией готовности и второй позицией готовности, согласно требуемому времени Tbx, вычисленному посредством модуля 24 вычисления требуемого времени для правого/левого поворота, и интервалу Ta времени между движущимися в потоке транспортными средствами, вычисленному посредством модуля 25 вычисления интервала времени между движущимися в потоке транспортными средствами.
[0053] Способ помощи при вождении
Ниже описывается пример способа помощи при вождении посредством устройства помощи при вождении согласно второму варианту осуществления со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 9. Операции обработки на этапах S101-S108, S111 и S115-S117 являются практически идентичными операциям обработки в первом варианте осуществления, и перекрывающиеся пояснения не повторяются ниже.
[0054] Когда на этапе S108 определено то, что транспортное средство C ожидает поворота направо в позиции готовности, заданной посредством модуля 26 задания позиции готовности, модуль 28 задания первой позиции готовности задает первую позицию готовности в допустимой области R1 готовности на этапе S21.
[0055] Ниже подробно описывается обработка на этапе S21 со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 10. На этапе S211, модуль 27 оценки виртуальной колеи допускает то, что имеется встречное транспортное средство, поворачивающее направо в противоположной полосе движения, и оценивает виртуальную колею B для встречного транспортного средства, как показано на фиг. 11. Модуль 27 оценки виртуальной колеи оценивает виртуальную колею, например, посредством использования модели руления на основе принципа Аккермана.
[0056] Модель руления на основе принципа Аккермана представлена посредством следующих уравнений (1)-(3). Уравнения (1) и (2) являются дифференциальными уравнениями для длины z пути в соответствующих направлениях по оси X и Y. Уравнение (3) является дифференциальным уравнением для длины z пути в направлении ориентации транспортного средства C. В уравнениях (1)-(3), δ представляет угол поворота при рулении, Lw представляет колесную базу, и κ представляет кривизну поворота.
Математическое выражение 1

Математическое выражение 2

Математическое выражение 3

[0057] Например, когда кривизна κ поворота, как показано на фиг. 12, представляет собой ввод в модель, траектория задается посредством сегмента клотоиды, в котором κ увеличивается монотонно, сегмента постоянной кривизны, в котором κ является постоянным, и сегмента клотоиды, в котором κ уменьшается монотонно, при этом угол поворота при рулении в итоге возвращается в нейтральную позицию. Длина zmax пути и максимальная кривизна κmax поворота определяются в зависимости от размера перекрестка. Интегрированное значение κ, указываемое посредством трапеции, обозначает конечную ориентацию транспортного средства и в результате равно 90°, когда перекресток включает в себя две ортогональных полосы движения, но может определяться в зависимости от угла пересечения перекрестка.
[0058] Поскольку каждая координата траектории, представленной посредством уравнений (1)-(3), представляет центральную позицию оси задних колес виртуального транспортного средства, модуль 27 оценки виртуальной колеи смещает каждую координату посредством использования предварительно определенной длины Lx виртуального транспортного средства и ширины Ly виртуального транспортного средства, с тем чтобы вычислять колею B в переднем левом краю или заднем левом краю виртуального транспортного средства. Колея B вычисляется посредством векторной графики [xz, yz] (z=0-zmax). В примере, показанном на фиг. 11, колея B является границей слева в области R3, указывающей колею виртуального транспортного средства, поворачивающего направо в противоположной полосе движения.
[0059] На этапе S212 модуль 22 оценки мертвых зон оценивает виртуальную мертвую зону модуля 13 обнаружения объектов, возникающую на противоположной полосе движения в каждой позиции в допустимой области R1 готовности, на основе виртуальной колеи B, оцененной на этапе S211.
[0060] Модуль 22 оценки мертвых зон оценивает мертвую зону в каждой позиции в допустимой области R1 готовности в направлении по оси X и направлении по оси Y (направлении справа-налево транспортного средства C), ортогональном к направлению по оси X. Например, когда транспортное средство C направляется через тормоз 32 или модуль 5 вывода, модуль 22 оценки мертвых зон может оценивать мертвую зону в каждой позиции в направлении по оси X при ограничении позицией транспортного средства C в направлении по оси Y на стоп-линии. Когда транспортное средство C автономно направляется, модуль 22 оценки мертвых зон может оценивать мертвую зону в каждой позиции в направлении по оси X при ограничении позицией транспортного средства C в направлении по оси Y ближе к противоположной полосе движения в полосе движения, с тем чтобы обеспечивать лучшую видимость. Даже когда транспортное средство C направляется через тормоз 32 или модуль 5 вывода, модуль 22 оценки мертвых зон может оценивать мертвую зону в каждой позиции в направлении по оси X при ограничении позицией транспортного средства C в направлении по оси Y ближе к противоположной полосе движения в полосе движения, так что транспортное средство C направляется посредством модуля 5 вывода в позицию в полосе движения ближе к противоположной полосе движения. Каждая позиция в направлении по оси X, используемая для оценки мертвой зоны посредством модуля 22 оценки мертвых зон, представляет собой каждую позицию, используемую для вычисления требуемого времени Tbx на этапе S107.
[0061] Например, как показано на фиг. 11, модуль 22 оценки мертвых зон оценивает виртуальную мертвую зону модуля 13 обнаружения объектов, возникающую на виртуальной колее B, оцененной посредством модуля 27 оценки виртуальной колеи. Модуль 22 оценки мертвых зон размечает транспортное средство C и виртуальную колею B на цифровой карте. В примере, показанном на фиг. 11, виртуальной мертвая зона возникает на противоположной полосе движения справа от каждой соединительной линии модуля 13 обнаружения объектов в каждой позиции в допустимой области R1 готовности и колее B.
[0062] Модуль 22 оценки мертвых зон может оценивать мертвую зону согласно наблюдаемому полю зрения и угловой разрешающей способности и разрешающей способности по дальности модуля 13 обнаружения объектов. Например, когда модуль 13 обнаружения объектов для обнаружения объектов на передней стороне устанавливается в середине транспортного средства C в направлении ширины транспортного средства, модуль 22 оценки мертвых зон вычисляет контактную линию, контактирующую с колеей B и проходящую через координаты модуля 13 обнаружения объектов в допустимой области R1 готовности на перекрестке. В частности, координаты модуля 13 обнаружения объектов в допустимой области R1 готовности задаются как [xr1, yr1]∈R1 и дискретизируются посредством предварительно определенной разрешающей способности, с тем чтобы вычислять арктангенс, когда каждая пара [xr1, yr1] используется в качестве исходной точки, и каждая пара [xz, yz] в колее B используется в качестве конечной точки. Линия, соединяющая конечную точку и исходную точку, соответствующие точкам перегиба вычисленного арктангенса, представляет собой соединительную линию.
[0063] На этапе S213 модуль 28 задания первой позиции готовности задает, в допустимой области R1 готовности, первую позицию готовности, в которой транспортное средство C может в достаточной степени выезжать на расстояние до противоположной полосы движения в то время, когда транспортное средство C ожидает поворота направо, на основе виртуальной мертвой зоны, оцененной на этапе S212. Первая позиция готовности представляет собой, например, такую позицию, что модуль 13 обнаружения объектов может обнаруживать расстояние до противоположной полосы движения, которая должна наблюдаться. Модуль 28 задания первой позиции готовности определяет расстояние до противоположной полосы движения, которая должна наблюдаться, согласно допустимому ограничению скорости в противоположной полосе движения, включенному в информацию дороги. Когда обработка на этапе S213 закончена, обработка на этапе S21 завершается, и процесс переходит к этапу S22.
[0064] На этапе S22 модуль 29 задания второй позиции готовности задает, в допустимой области R1 готовности, вторую позицию готовности ближе к середине перекрестка, чем первая позиция готовности, заданная на этапе S21. Модуль 29 задания второй позиции готовности задает вторую позицию готовности, например, на основе первой позиции готовности, кривизны поворота транспортного средства C и ограничения степени изменения кривизны. Альтернативно, виртуальная позиция готовности в допустимой области R1 готовности, в которой требуемое время Tbx аппроксимируется как интервал Ta времени между движущимися в потоке транспортными средствами, может задаваться в качестве второй позиции готовности.
[0065] На этапе S23 модуль 26 задания позиции готовности задает позицию P1 готовности, в которой транспортное средство C ожидает поворота направо между первой позицией готовности и второй позицией готовности, заданными на этапе S21 и этап S22, соответственно, и процесс переходит к этапу S111.
[0066] Последовательность операций обработки от этапа S21 до этапа S23 может выполняться, когда модуль 13 обнаружения объектов не обнаруживает транспортное средство в состоянии готовности, ожидающее поворота направо в противоположной полосе движения. Последовательность операций обработки от этапа S21 до этапа S23 может выполняться, в качестве другой процедуры, параллельно последовательности операций обработки от этапа S109 до этапа S114 на блок-схеме последовательности операций способа, показанной на фиг. 3, независимо от присутствия или отсутствия транспортного средства в состоянии готовности.
[0067] Модуль 26 задания позиции готовности задает позицию P1 готовности ближе к первой позиции готовности, в которой лучшая видимость может фундаментально обеспечиваться более надежно. Позиция P1 готовности может задаваться ближе ко второй позиции готовности, когда отсутствует транспортное средство в состоянии готовности, ожидающее поворота направо в противоположной полосе движения, но имеется расстояние между едущими по прямой транспортными средствами в противоположной полосе движения, доступной для поворота направо.
[0068] На этапе S117 модуль 26 задания позиции готовности может выполнять коррекцию, чтобы последовательно изменять позицию P1 готовности ко второй позиции готовности после того, как предварительно определенное время прошло с момента, когда транспортное средство C достигло позиции P1 готовности. Модуль 26 задания позиции готовности может последовательно изменять позицию P1 готовности ко второй позиции готовности, когда транспортное средство, поворачивающее направо в противоположной полосе движения, не обнаруживается в пределах предварительно определенного периода времени после того, как транспортное средство C достигло позиции P1 готовности.
[0069] Дополнительно, на этапе S117, модуль 26 задания позиции готовности может выполнять коррекцию, чтобы последовательно изменять позицию P1 готовности ко второй позиции готовности в зависимости от истекшего времени готовности, когда модуль 13 обнаружения объектов, служащий в качестве модуля обнаружения едущих сзади транспортных средств, обнаруживает едущее сзади транспортное средство. Помимо этого, на этапе S117, модуль 26 задания позиции готовности может выполнять коррекцию, чтобы последовательно изменять позицию P1 готовности ко второй позиции готовности до тех пор, пока не изменится сигнал, обнаруженный посредством модуля 13 обнаружения объектов, служащего в качестве модуля обнаружения сигналов.
[0070] Устройство помощи при вождении согласно второму варианту осуществления оценивает виртуальную мертвую зону, возникающую на противоположной полосе движения, обращенной к транспортному средству C, с тем чтобы направлять транспортное средство C таким образом, чтобы ожидать поворота направо или налево в позиции исходя из последующего изменения условий движения.
[0071] Устройство помощи при вождении согласно второму варианту осуществления оценивает виртуальную мертвую зону в зависимости от размера перекрестка, с тем чтобы дополнительно повышать эффективность правого поворота с учетом риска.
[0072] Устройство помощи при вождении согласно второму варианту осуществления задает позицию P1 готовности на основе интервала Ta времени между движущимися в потоке транспортными средствами между едущими по прямой транспортными средствами в противоположной полосе движения и требуемого времени Tb, необходимого для поворота направо или налево, с тем чтобы направлять транспортное средство C таким образом, чтобы ожидать поворота направо или налево в позиции, определенной с учетом интенсивности движения в противоположной полосе движения.
[0073] Устройство помощи при вождении согласно второму варианту осуществления вычисляет требуемое время Tb, необходимое для поворота направо или налево, в зависимости от размера перекрестка, с тем чтобы направлять транспортное средство C таким образом, чтобы ожидать поворота направо или налево в позиции, варьирующейся в зависимости от типа перекрестка, к примеру, несколько полос движения.
[0074] Устройство помощи при вождении согласно второму варианту осуществления уведомляет пользователя в отношении того, что оцененная мертвая зона ухудшена, с тем чтобы снижать риск начала правого поворота с увеличенной мертвой зоной.
[0075] Устройство помощи при вождении согласно второму варианту осуществления изменяет позицию P1 готовности ко второй позиции готовности для более легкого правого поворота в зависимости от времени готовности в позиции P1 готовности, с тем чтобы уменьшать дискомфорт пассажира в течение состояния готовности перед перекрестком.
[0076] Устройство помощи при вождении согласно второму варианту осуществления изменяет позицию P1 готовности ко второй позиции готовности в зависимости от времени готовности в позиции P1 готовности, когда отсутствует транспортное средство, поворачивающее направо или налево в противоположной полосе движения, с тем чтобы повышать вероятность поворачивать направо или налево надлежащим образом.
[0077] Устройство помощи при вождении согласно второму варианту осуществления постепенно изменяет позицию P1 готовности к середине перекрестка, когда едущее сзади транспортное средство присутствует, с тем чтобы уменьшать дискомфорт едущего сзади транспортного средства.
[0078] Устройство помощи при вождении согласно второму варианту осуществления постепенно изменяет позицию P1 готовности к середине перекрестка при ожидании изменения индикатора светофора на перекрестке, так что оно плавно поворачивает направо или налево, с расчетом на последующее действие встречного транспортного средства в противоположной полосе движения при изменении индикатора светофора.
[0079] Другие варианты осуществления
Хотя настоящее изобретение описано выше со ссылкой на варианты осуществления, следует понимать, что настоящее изобретение не имеет намерение быть ограниченным описаниями и чертежами, составляющими часть этого раскрытия сущности. Различные альтернативные варианты осуществления, примеры и технические варианты применения должны становиться очевидными для специалистов в данной области техники согласно этому раскрытию сущности. Также следует понимать, что настоящее изобретение включает в себя различные виды вариантов осуществления, не описанных в данном документе. Следовательно, объем настоящего изобретения задается только посредством надлежащих признаков согласно формуле изобретения с учетом пояснений, приведенных выше.
Промышленная применимость
[0080] Настоящее изобретение может предоставлять устройство помощи при вождении и способ помощи при вождении, допускающие направление транспортного средства C таким образом, чтобы ожидать поворота направо или налево в позиции, исходя из риска и эффективности правого или левого поворота с учетом мертвой зоны, возникающей на противоположной полосе движения, обращенной к транспортному средству C.
Список номеров ссылок
[0081] 11 - модуль получения информации дороги
12 - модуль получения позиции транспортного средства
13 - модуль обнаружения объектов
14 - модуль обнаружения информации правых/левых поворотов
21 - модуль определения транспортных средств в состоянии готовности
22 - модуль оценки мертвых зон
23 - модуль задания области готовности
24 - модуль вычисления требуемого времени для правого/левого поворота
25 - модуль вычисления интервала времени между движущимися в потоке транспортными средствами
26 - модуль задания позиции готовности
27 - модуль оценки виртуальной колеи








Изобретение относится к системам помощи при вождении транспортного средства. Устройство помощи при вождении содержит модуль получения информации о дороге, сконфигурированный модуль получения позиции транспортного средства, модуль обнаружения объектов, модуль обнаружения информации правых/левых поворотов, модуль определения транспортных средств в состоянии готовности, модуль оценки мертвых зон и модуль задания области готовности. Модуль определения транспортных средств в состоянии готовности сконфигурирован с возможностью определять, присутствует или нет транспортное средство в состоянии готовности, ожидающее поворота направо или налево в противоположной полосе движения, на перекрестке. Модуль задания области готовности сконфигурирован с возможностью задавать область готовности, в которой модуль обнаружения объектов может обнаруживать противоположную полосу движения в то время, когда транспортное средство ожидает поворота направо или налево. Достигается повышение безопасности управления транспортным средством. 2 н. и 16 з.п. ф-лы, 12 ил.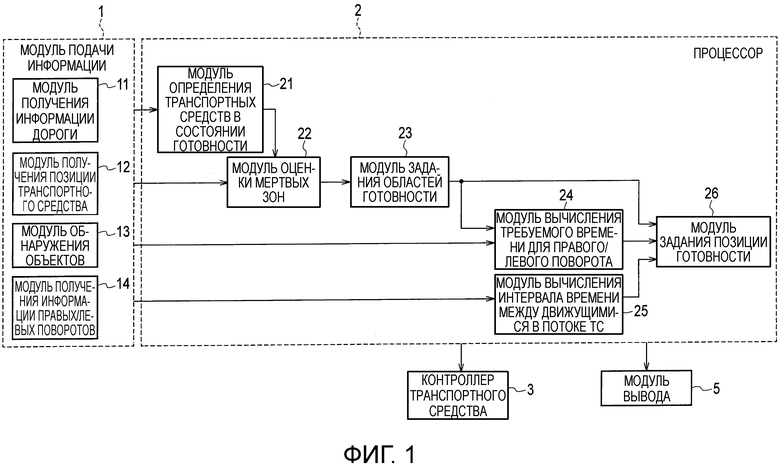
1. Устройство помощи при вождении, содержащее:
- модуль (11) получения информации о дороге, сконфигурированный с возможностью получать информацию о дороге, так что транспортное средство может следовать по дороге с возможностью приведения в движение;
- модуль (12) получения позиции транспортного средства, сконфигурированный с возможностью получать текущую позицию транспортного средства, включенную в информацию дороги;
- модуль (13) обнаружения объектов, сконфигурированный с возможностью обнаруживать объект перед транспортным средством;
- модуль (14) обнаружения информации правых/левых поворотов, сконфигурированный с возможностью обнаруживать информацию правого/левого поворота, указывающую то, что транспортное средство проезжает по противоположной полосе движения таким образом, что оно поворачивает направо или налево на перекрестке после предварительно определенного периода времени;
- модуль (21) определения транспортных средств в состоянии готовности, сконфигурированный с возможностью определять то, присутствует или нет транспортное средство в состоянии готовности, ожидающее поворота направо или налево в противоположной полосе движения, на перекрестке согласно информации дороги, текущей позиции и результату обнаружения модуля (13) обнаружения объектов, когда модуль (14) обнаружения информации правых/левых поворотов обнаруживает информацию правого/левого поворота;
- модуль (22) оценки мертвых зон, сконфигурированный с возможностью оценивать мертвую зону модуля (13) обнаружения объектов, возникающую на противоположной полосе движения вследствие транспортного средства в состоянии готовности; и
- модуль (23) задания области готовности, сконфигурированный с возможностью задавать область готовности, в которой модуль (13) обнаружения объектов может обнаруживать противоположную полосу движения в то время, когда транспортное средство ожидает поворота направо или налево, на основе мертвой зоны, оцененной посредством модуля (22) оценки мертвых зон.
2. Устройство помощи при вождении по п. 1, дополнительно содержащее:
- модуль (24) вычисления требуемого времени для правого/левого поворота, сконфигурированный с возможностью вычислять в каждое требуемое время, в течение которого транспортное средство начинает и завершает поворот направо или налево;
- модуль (25) вычисления интервала времени между движущимися в потоке транспортными средствами, сконфигурированный с возможностью вычислять интервал времени между движущимися в потоке транспортными средствами между едущими по прямой транспортными средствами в противоположной полосе движения до тех пор, пока транспортное средство не въезжает на перекресток, согласно информации о дороге, текущей позиции и результату обнаружения модуля (13) обнаружения объектов; и
- модуль (26) задания позиции готовности, сконфигурированный с возможностью задавать позицию готовности, в которой транспортное средство ожидает поворота направо или налево в области готовности, согласно требуемому времени и интервалу времени между движущимися в потоке транспортными средствами.
3. Устройство помощи при вождении по п. 2, в котором модуль (24) вычисления требуемого времени для правого/левого поворота вычисляет, в качестве требуемого времени, период времени, в течение которого транспортное средство перемещается из позиции готовности в позицию, не препятствующую проезду объекта через перекресток, в зависимости от размера перекрестка.
4. Устройство помощи при вождении по п. 2 или 3, в котором модуль (26) задания позиции готовности задает позицию готовности таким образом, что интервал времени между движущимися в потоке транспортными средствами аппроксимируется как требуемое время.
5. Устройство помощи при вождении по любому из пп. 1-3, в котором модуль (22) оценки мертвых зон оценивает мертвую зону согласно угловой разрешающей способности модуля (13) обнаружения объектов и позиции транспортного средства в состоянии готовности.
6. Устройство помощи при вождении по п. 2 или 3, в котором модуль (22) оценки мертвых зон уведомляет пользователя в отношении того, что оцененная мертвая зона ухудшена в то время, когда транспортное средство ожидает поворота направо или налево в позиции готовности, заданной посредством модуля (26) задания позиции готовности.
7. Устройство помощи при вождении по п. 2 или 3, дополнительно содержащее модуль обнаружения едущих сзади транспортных средств, сконфигурированный с возможностью обнаруживать едущее сзади транспортное средство, едущее сзади транспортного средства,
- при этом модуль (26) задания позиции готовности изменяет позицию готовности к середине перекрестка, когда модуль обнаружения едущих сзади транспортных средств обнаруживает едущее сзади транспортное средство в то время, когда транспортное средство ожидает поворота направо или налево в позиции готовности.
8. Устройство помощи при вождении по п. 2 или 3, дополнительно содержащее модуль обнаружения сигналов, сконфигурированный с возможностью обнаруживать сигнал, указываемый посредством светофора на перекрестке,
- при этом модуль (26) задания позиции готовности изменяет позицию готовности к середине перекрестка до тех пор, пока сигнал, обнаруженный посредством модуля обнаружения сигналов, не изменится в то время, когда транспортное средство ожидает поворота направо или налево в позиции готовности.
9. Устройство помощи при вождении по п. 1, дополнительно содержащее модуль (27) оценки виртуальной колеи, сконфигурированный с возможностью оценивать виртуальную колею, по которой встречное транспортное средство в противоположной полосе движения поворачивает направо или налево, когда модуль (14) обнаружения информации правых/левых поворотов обнаруживает информацию правого/левого поворота,
- при этом модуль (22) оценки мертвых зон оценивает виртуальную мертвую зону модуля (13) обнаружения объектов в противоположной полосе движения на основе виртуальной колеи.
10. Устройство помощи при вождении по п. 9, в котором модуль (27) оценки виртуальной колеи оценивает виртуальную колею в зависимости от размера перекрестка.
11. Устройство помощи при вождении по п. 9 или 10, дополнительно содержащее:
- модуль (24) вычисления требуемого времени для правого/левого поворота, сконфигурированный с возможностью вычислять в каждое требуемое время, в течение которого транспортное средство начинает и завершает поворот направо или налево;
- модуль вычисления (25) интервала времени между движущимися в потоке транспортными средствами, сконфигурированный с возможностью вычислять интервал времени между движущимися в потоке транспортными средствами между едущими по прямой транспортными средствами в противоположной полосе движения до тех пор, пока транспортное средство не въезжает на перекресток, согласно информации дороги, текущей позиции и результату обнаружения модуля (13) обнаружения объектов; и
- модуль (26) задания позиции готовности, сконфигурированный с возможностью задавать позицию готовности, в которой транспортное средство ожидает поворота направо или налево, между первой позицией готовности, заданной согласно виртуальной мертвой зоне, и второй позицией готовности, заданной ближе к середине перекрестка, чем первая позиция готовности, согласно требуемому времени и интервалу времени между движущимися в потоке транспортными средствами.
12. Устройство помощи при вождении по п. 11, в котором модуль (24) вычисления требуемого времени для правого/левого поворота вычисляет, в качестве требуемого времени, период времени, в течение которого транспортное средство перемещается из позиции готовности в позицию, не препятствующую проезду объекта через перекресток, в зависимости от размера перекрестка.
13. Устройство помощи при вождении по п. 11, в котором модуль (22) оценки мертвых зон уведомляет пользователя в отношении того, что оцененная мертвая зона хуже виртуальной мертвой зоны в то время, когда транспортное средство ожидает поворота направо или налево в позиции готовности, заданной посредством модуля (26) задания позиции готовности.
14. Устройство помощи при вождении по п. 11, в котором модуль (26) задания позиции готовности изменяет позицию готовности ко второй позиции готовности после того, как предварительно определенное время прошло с момента, когда транспортное средство достигло позиции готовности в то время, когда транспортное средство ожидает поворота направо или налево в позиции готовности, заданной посредством модуля (26) задания позиции готовности.
15. Устройство помощи при вождении по п. 11, в котором модуль (26) задания позиции готовности изменяет позицию готовности ко второй позиции готовности, когда модуль (13) обнаружения объектов не обнаруживает встречное транспортное средство, поворачивающее направо или налево в противоположной полосе движения в пределах предварительно определенного периода времени после того, как транспортное средство достигло позиции готовности в то время, когда транспортное средство ожидает поворота направо или налево в позиции готовности, заданной посредством модуля (26) задания позиции готовности.
16. Устройство помощи при вождении по п. 11, дополнительно содержащее модуль обнаружения едущих сзади транспортных средств, сконфигурированный с возможностью обнаруживать едущее сзади транспортное средство, едущее сзади транспортного средства,
- при этом модуль (26) задания позиции готовности изменяет позицию готовности ко второй позиции готовности, когда модуль обнаружения едущих сзади транспортных средств обнаруживает едущее сзади транспортное средство в то время, когда транспортное средство ожидает поворота направо или налево в позиции готовности.
17. Устройство помощи при вождении по п. 11, дополнительно содержащее модуль обнаружения сигналов, сконфигурированный с возможностью обнаруживать сигнал, указываемый посредством светофора на перекрестке,
- при этом модуль задания (26) позиции готовности изменяет позицию готовности ко второй позиции готовности до тех пор, пока сигнал, обнаруженный посредством модуля обнаружения сигналов, не изменится в то время, когда транспортное средство ожидает поворота направо или налево в позиции готовности.
18. Способ помощи при вождении, содержащий этапы, на которых:
- получают информацию дороги, так что транспортное средство может следовать по дороге с возможностью приведения в движение;
- получают текущую позицию транспортного средства, включенную в информацию дороги;
- обнаруживают объект перед транспортным средством посредством модуля (13) обнаружения объектов;
- обнаруживают информацию правого/левого поворота, указывающую то, что транспортное средство проезжает по противоположной полосе движения таким образом, что оно поворачивает направо или налево на перекрестке после предварительно определенного периода времени;
- определяют то, присутствует или нет транспортное средство в состоянии готовности, ожидающее поворота направо или налево в противоположной полосе движения, на перекрестке согласно информации дороги, текущей позиции и результату обнаружения модуля (13) обнаружения объектов, когда информация правого/левого поворота обнаруживается;
- оценивают мертвую зону модуля (13) обнаружения объектов, возникающую на противоположной полосе движения вследствие транспортного средства в состоянии готовности; и
- задают область готовности, в которой модуль (13) обнаружения объектов может обнаруживать противоположную полосу движения в то время, когда транспортное средство ожидает поворота направо или налево согласно мертвой зоне.
| JP 2010079565 A, 08.04.2010 | |||
| JP 2006227811 A, 31.08.2006 | |||
| EA 200870145 A1, 30.12.2008. |

