Изобретение относится к авиации и может быть использовано в воздушной навигации для предотвращения столкновения летательного аппарата (ЛА) с подстилающей поверхностью.
Известен способ предотвращения столкновения ЛА с Землей при посадке, основанный на определении местоположения ЛА и его пространственного положения и сравнении этих данных с соответствующей информацией по взлетно-посадочной полосе (ВПП) (см., например, патент РФ №2153195 с приоритетом от 22.03.94 г., МПК: G 08 G 5/04).
Известный способ позволяет предотвращать столкновения ЛА с ВПП без использования наземных средств обеспечения посадки, однако надежность его применения зависит от точности выведения ЛА в заданную точку посадочного коридора.
Наиболее близким аналогом-прототипом является способ (см., например, патент РФ №2124760 с приоритетом от 07.04.92 г., МПК: В 64 D 45/04, G 08 G 5/04), включающий контролирование положения ЛА относительно подстилающей поверхности (поверхности Земли), а также предварительное формирование базы данных, содержащей совокупность сигналов, соответствующих рельефу подстилающей поверхности на трассе всего полета ЛА, запоминание этой совокупности сигналов, получение пилотом сигналов из этой совокупности и сигналов, соответствующих навигационной обстановке, при этом с помощью бортовых устройств получают информацию о координатах ЛА, векторах скорости и ускорения, по которым определяют траекторию полета и соответственно огибающую по высоте в зоне движения и формируют сигнал “тревоги”, предупреждающий о достижении допустимых пороговых значений сближения ЛА с препятствиями, например, при уменьшении высоты полета ЛА.
Такой способ обеспечивает возможность оценки степени безопасности положения ЛА в полете относительно подстилающей поверхности, однако он рассчитан на автономное, без взаимодействия с наземными службами обеспечения безопасности полета применение, что не всегда допустимо, и в том числе, из-за погрешностей в определении координат ЛА, причем это условие применения данного способа вызывает необходимость регулярного обновления базы данных ЛА, что в силу специфики требований к содержащейся в ней информации достаточно непросто.
Предлагаемое изобретение решает задачу повышения безопасности полета путем заблаговременного обеспечения пилота ЛА информацией о внешней обстановке и наличии в зоне движения ЛА объектов, создающих угрозу столкновения с подстилающей поверхностью.
Сущность изобретения состоит в том, что в способе предотвращения столкновения летательного аппарата с Землей, включающем предварительное формирование совокупности сигналов, соответствующих рельефу подстилающей поверхности на трассе полета, запоминание и получение сигналов из этой совокупности, контролирование положения летательного аппарата (ЛА) относительно подстилающей поверхности Земли путем формирования рельефа подстилающей поверхности в области нахождения ЛА из предварительно запомненной совокупности сигналов с помощью сигналов, соответствующих текущим координатам местонахождения ЛА и вектору его скорости, а также формирование сигналов, предупреждающих о достижении допустимых пороговых значений сближения ЛА с препятствием, отличающийся тем, что в полете дополнительно формируют сигналы рельефа подстилающей поверхности путем ее прямого наблюдения с борта ЛА, а формирование сигналов, соответствующих координатам рельефа подстилающей поверхности в области местонахождения ЛА во время полета, а также сигналов, получаемых путем прямого наблюдения подстилающей поверхности, производят в ракурсах, соответствующих ракурсу наблюдения подстилающей поверхности и на индикаторе ЛА, например на индикаторе лобового стекла, формируют текущие изображения подстилающей поверхности в области местонахождения ЛА, соответствующие расчетным и наблюдаемым сигналам, после чего производят сравнение соответствия полученной информации реально наблюдаемой обстановке, и в случае их расхождения проводят корректировку сформированного на индикаторе изображения подстилающей поверхности в соответствии с реально наблюдаемой обстановкой, а затем в соответствии с характеристиками скорости полета ЛА и расстояния ЛА до выявленных на скорректированном изображении подстилающей поверхности препятствий определяют возможность продолжения полета в прежнем режиме, при этом сигналы, соответствующие получаемым от систем навигации текущим координатам ЛА, формируют во время полета постоянно, а сигналы из предварительно сформированной совокупности, соответствующие координатам рельефа подстилающей поверхности в области местонахождения ЛА, в течение полета выделяют по запросу пилота ЛА, а в сложных полетных условиях, при полете на малых высотах в горной местности, а также при заходе на посадку выделяют постоянно и соответственно в эти периоды времени производят формирование изображения подстилающей поверхности, причем совмещение полученных при этом изображений производят путем привязки координат ЛА к координатам соответствующих точек подстилающей поверхности.
При этом рельеф подстилающей поверхности на трассе полета ЛА для предварительного формирования соответствующих сигналов задают в виде цифрового представления высот характерных точек этого рельефа относительно, например, уровня моря, полученного по карте местности и/или путем наземной, или авиационной, или космической топографической съемки.
Кроме того, соответствующее текущее изображение подстилающей поверхности формируют в упрощенном виде с отображением основных ориентиров и/или возможных препятствий, например, в виде пирамид с указанием их высоты.
При этом размеры области местонахождения ЛА выбирают соответствующими величине проекции ЛА на подстилающую поверхность, причем размеры области местонахождения ЛА по курсу его движения выбирают соответствующими (1,5-15) длины ЛА, а по ширине равными (1,5-2,0) соответствующей величины проекции ЛА на подстилающую поверхность.
Кроме того, размеры области по курсу движения ЛА выбирают, исходя из соотношения
L=L0+α VлаΔt,
где L0 - длина ЛА, м; α =1,5-10 - безразмерный коэффициент; vЛА - скорость движения ЛА, м/с; Δ t - промежуток времени между измерениями координат ЛА, с.
Кроме того, координаты начала координат области, определяющей местонахождения ЛА, выбирают соответствующими его текущим координатам.
Кроме того, при посадке, например, самолета определяют область, соответствующую наблюдению взлетно-посадочной полосы и прилегающей окрестности, с центром в точке местоположения самолета, например кабины пилота с линией визирования по направлению посадочной глиссады.
При этом координаты местонахождения ЛА определяют или автономно с помощью средств спутниковой или инерциально-спутниковой навигации, например, в дифференциальном режиме, или с помощью средств системы управления воздушным движением с последующей передачей на ЛА по каналам связи, причем в качестве каналов связи выбирают УКВ линии передачи данных, используемые, например, в системах автоматического зависимого наблюдения - вещательного (АЗН-В).
Кроме того, наблюдение подстилающей поверхности производят с помощью бортовой, например, телевизионной, и/или тепловизионной, и/или радиолокационной, например миллиметрового диапазона, системы формирования изображений.
Кроме того, предварительно сформированную совокупность сигналов, соответствующих рельефу подстилающей поверхности на трассе полета или отдельных ее участках, передают на ЛА из базы данных соответствующих наземных служб управления полетом.
При этом формирование сигналов, предупреждающих о возможности достижения допустимых пороговых значений сближения ЛА с препятствием, производят, например, путем соответствующего окрашивания формируемых на индикаторе лобового стекла ЛА и/или на экране бортового дисплея изображений высот и других предполагаемых препятствий, находящихся в соответствующих участках подстилающей поверхности и получаемых по предварительно сформированной совокупности сигналов, в соответствии с результатами обработки сигналов, получаемых при наблюдении подстилающей поверхности, причем окрашивание изображений высот и других предполагаемых препятствий, находящихся в соответствующих участках подстилающей поверхности, производят или зеленым, или желтым, или красным цветом в зависимости от расстояния между ними и ЛА и соответственно времени подлета к ним при условии сохранения вектора скорости полета, причем зеленый цвет соответствует безопасному полету, желтый - полету, требующему корректировку курса, а красный цвет соответствует ситуации, в которой, чтобы избежать столкновения, пилоту следует принять экстренные меры.
Применение заявленного способа позволяет обеспечивать пилота ЛА надежной информацией об окружающей обстановке и возможности продолжения заданного режима полета в условиях плохой видимости за счет формирования изображения подстилающей поверхности с помощью комплекса средств. При этом данный способ обеспечивает возможность оценки степени безопасности положения ЛА в полете относительно подстилающей поверхности при автономном применении, а также при взаимодействии с наземными службами обеспечения безопасности полета.
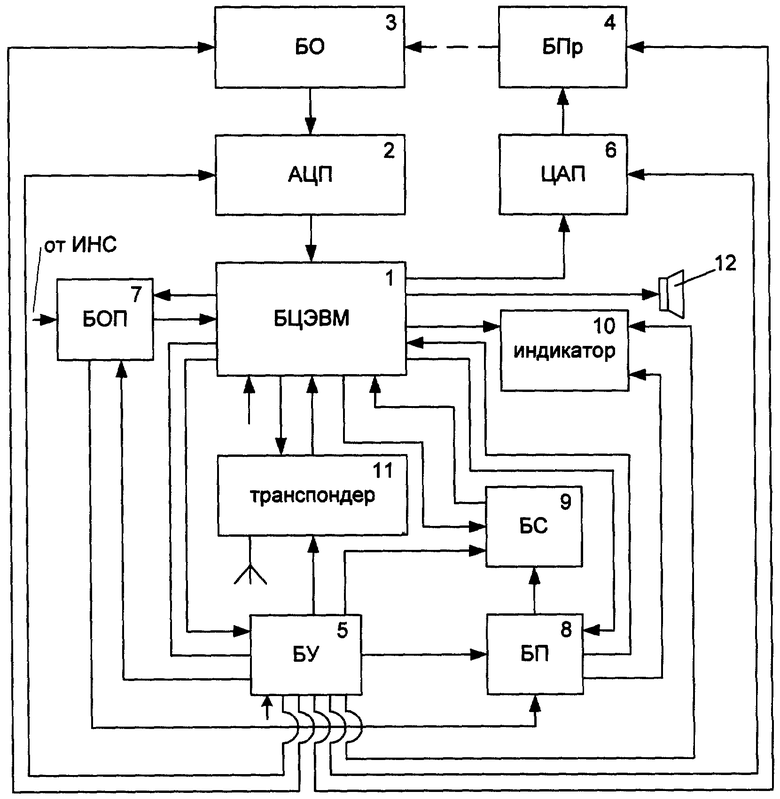
На чертеже показан пример выполнения системы для осуществления способа предотвращения столкновения летательного аппарата с Землей.
Система для осуществления способа предотвращения столкновения летательного аппарата с Землей содержит бортовую цифровую электронную вычислительную машину (БЦ ЭВМ) 1, выполненную в виде, например, промышленного компьютера IPPC-950Т фирмы Advantech (см., например, справочник “Передовые технологии автоматизации”, Москва, апрель 1999, с.5, составитель справочника и поставщик продукции фирма ProSoft, адрес в Web - http://www.prosoft.ru) и предназначенную для получения и обработки информации от бортовой аппаратуры, а также для формирования сигналов, указывающих на степень опасности сближения ЛА с препятствиями.
БЦ ЭВМ 1 первым входом соединена с выходом аналого-цифрового преобразователя (АЦП) 2, выполненного в виде платы PCL-1713 фирмы Advantech (см., например, справочник “Передовые технологии автоматизации”, Москва, апрель 1999, с.11, составитель справочника и поставщик продукции фирма ProSoft, адрес в Web - http://www.prosoft.ru), первым входом подключенного к выходу блока 3 обзора, предназначенного для контроля внешней обстановки, например для осмотра подстилающей поверхности, включающего телевизионный датчик EVI-331 фирмы Sony (на чертеже не показан), выполненный (см., например, www.sony.com) на основе использования матрицы приборов с зарядовой связью (ПЗС) и установленный на поворотной платформе, соединенной с блоком 4 привода, выполненного в виде электродвигателя типа ДБМ-185-16-0,3-2 (см., например, “Бесконтактный моментный привод” (технико-экономическая информация), составители Ю.М. Беленький и др., ЛДНТП, Ленинград, 1990, с.10), причем эта платформа выполнена в виде закрепленного на валу электродвигателя основания, содержащего узлы крепления (на чертеже не показаны) блока 3 обзора.
Следует иметь в виду, что наряду с телевизионным датчиком в блоке 3 обзора может быть установлен и/или тепловизионный датчик, и/или антенное устройство радиолокатора, например, миллиметрового диапазона, также обеспечивающих возможность формирования изображений, причем наличие и комбинирование работы таких датчиков, например, путем наложения соответствующих, получаемых с их помощью сигналов позволяет повысить качество изображения подстилающей поверхности, что особенно важно в условиях, например, плохой видимости.
АЦП 2, блок 3 обзора и блок 4 привода своими управляющими входами соединены соответственно с первым, вторым и третьим выходами блока 5 управления, выполненного в виде соответствующего блока, приведенного в патенте РФ №2117326, четвертым выходом подключенного к первому (управляющему) входу цифроаналогового преобразователя (ЦАП) 6, выполненного в виде платы PCL-732 фирмы Advantech (см., например, справочник “Передовые технологии автоматизации”, Москва, апрель 1999, с.11, составитель справочника и поставщик продукции фирма ProSoft, адрес в Web - http://www.prosoft.ru), выходом соединенного со входом блока 4 привода, а вторым входом подключенного к первому выходу БЦ ЭВМ 1.
Вторым входом БЦ ЭВМ 1 соединена с первым выходом блока 7 определения параметров, выполненного в виде микропроцессора на КМОП микросхемах 588 ВС2В (см., например, Б.Л. Перельман и В.В. Шевелев “Отечественные микросхемы и зарубежные аналоги”, справочник, М.: Изд. “НТЦ Микротех”, 1998, с.130), первым входом соединенного с выходом инерциально-навигационной системы (ИНС) ЛА (на чертеже не показана; см., например, “Авионика России”, энциклопедический справочник, издание “Национальной Ассоциации авиапроизводителей”, С-Петербург, 1999, с.10-12), а вторым выходом и третьим (управляющим) входом подключенного к первому входу блока 8 памяти и пятому выходу блока 5 управления соответственно.
Третьим входом БЦ ЭВМ 1 соединена с шестым выходом блока 5 управления, седьмым и восьмым выходами подключенного соответственно ко второму входу блока 8 памяти и первому входу блока 9 сравнения, предназначенного для сопоставления считываемых с БЦ ЭВМ 1 и блока 8 памяти сигналов, своими вторым и третьим входами соединенного соответственно со вторым выходом БЦ ЭВМ 1 и первым выходом блока 8 памяти, вторым выходом подключенного к первому входу индикатора 10, предназначенного для визуализации соответствующих сигналов, поступающих от БЦ ЭВМ 1 и из блока 8 памяти, в виде изображения, например, подстилающей поверхности, причем блок 8 памяти третьим входом соединен с третьим выходом БЦ ЭВМ 1.
Четвертым входом БЦ ЭВМ 1 подключена к выходу блока 9 сравнения, а четвертым и пятым выходами соединена соответственно со вторым входом индикатора 10 и первым входом блока 5 управления, своим восьмым выходом подключенного к первому (управляющему) входу транспондера 11, своими вторым входом и первым выходом соединенного соответственно с шестым выходом и пятым входом БЦ ЭВМ 1, шестым входом подключенной к третьему выходу блока 8 памяти.
Кроме того, БЦ ЭВМ 1 седьмым и восьмым выходами подключена соответственно ко второму входу блока 7 вычисления координат и ко входу блока 12 тревожной сигнализации, а блок 5 управления девятым выходом соединен с третьим (управляющим) входом индикатора 10.
Блок 8 памяти содержит совокупность сигналов, соответствующих базе данных характеристик подстилающей поверхности, в том числе, координатам высот и др. неровностей по трассе полета ЛА, и выполнен на микросхеме MTSLC512R8D4, а также в виде, например, твердотельного диска на Flash-памяти типа SD25BI-350-101 фирмы SanDisk (см., например, справочник “Передовые технологии автоматизации”, Москва, апрель 1999, с.25, составитель справочника и поставщик продукции фирма ProSoft, адрес в Web - http://www.prosoft.ru), который через адаптер (на чертеже не показан) типа, например, IDE-AB7 той же фирмы (см. там же с.26) подключен к компьютеру (БЦ ЭВМ 1) и соответственно к другим блокам системы.
Блок 9 сравнения выполнен в виде соответствующего цифрового устройства на КМОП микросхемах 1526 СА1 (см., например, Б.Л. Перельман и В.В. Шевелев “Отечественные микросхемы и зарубежные аналоги”, справочник, М.: Изд. “НТЦ Микротех”, 1998, с.49).
Индикатор 10 выполнен в виде плоскопанельного VGA монитора (разрешение 1240× 1024) типа FP20P-FC фирмы Intecolor (см., например, справочник “Передовые технологии автоматизации”, Москва, апрель 1999, с.28, составитель справочника и поставщик продукции фирма ProSoft, адрес в Web - http://www.prosoft.ru).
Транспондер 11 выполнен в виде соответствующего устройства VDL 4000/GA компании C.N.S.Systems, Швеция (см., например, www.cns.se), предназначен для определения положения ЛА (см., например, патент РФ №2108627) при работе, например, в режиме автоматического зависимого наблюдения - вещательного (АЗН-В) и содержит процессор, соответственно соединенный с приемником спутниковой навигации (GPS/ГЛОНАСС) и с УКВ передатчиком (на чертеже не показаны), а, кроме того, входом подключенный ко входу, а выходом соединенный с выходом транспондера. При этом приемник спутниковой навигации и УКВ передатчик транспондера 11 соединены с соответствующими антенными устройствами (на чертеже показаны в объединенном виде, но не обозначены) радиочастотного (УКВ) канала. Для согласованного функционирования в системе транспондер 11 управляющим входом подключен к управляющему входу процессора (на чертеже не показано). Приемник спутниковой навигации может быть выполнен в виде устройства GPS, например, Magnavox MX 4200 фирмы “Магнавокс корп.” США (см., например, патент РФ №2108627), процессор может быть выполнен в виде микропроцессора на КМОП микросхемах 588 ВС2В (см., например, Б.Л. Перельман и В.В. Шевелев “Отечественные микросхемы и зарубежные аналоги”, справочник, М.: Изд. “НТЦ Микротех”, 1998, с.130).
Блок 12 тревожной сигнализации выполнен в виде акустической системы, содержащей электродинамики, выходами соединенные с наушниками пилота (на чертеже не показаны) (см., например. Offprint from Modern Simulation & Training, 4/99, c.1-4).
Система для осуществления способа предотвращения столкновения летательного аппарата с Землей работает следующим образом.
Во время полета непосредственно или с помощью БЦ ЭВМ 1 включают блок 5 управления, который вводит в рабочий режим остальные устройства и блоки системы и соответственно синхронизирует их работу.
При снижении ЛА до заранее установленной (допустимой) высоты, определяемой с помощью работающего в автоматическом режиме высотомера ИНС (на чертеже не показаны), блок 7 определения параметров движения ЛА по запросу (команде) от БЦ ЭВМ 1 получает от ИНС сигналы, соответствующие координатам ЛА, по которым определяет параметры вектора скорости ЛА (см. приложение 1) и передает соответствующую информацию в БЦ ЭВМ 1. Одновременно по соответствующему запросу в БЦ ЭВМ 1 поступает информация о координатах ЛА от системы управления воздушным движением (не показана) через систему GPS/ГЛОНАСС и транспондер 11 или автономно с помощью транспондера 11. После обработки этой информации на БЦ ЭВМ 1 запрашивают из блока 8 памяти записанную в нем в виде соответствующей совокупности электрических сигналов информацию, характеризующую рельеф подстилающей поверхности в области, определенной координатами местонахождения ЛА в текущий момент времени, и из блока 8 памяти соответствующую информацию подают в блок 9 сравнения.
При этом местонахождение ЛА определяют в виде области, размеры которой выбирают соответствующими величине проекции ЛА на подстилающую поверхность или же местонахождение ЛА определяют в виде области, размеры которой по курсу движения ЛА выбирают соответствующими (1,5-15) длины ЛА, а по ширине равными (1,5-2,0) соответствующей величины проекции ЛА на подстилающую поверхность.
Кроме того, размеры области по курсу движения ЛА выбирают, исходя, например, из соотношения
L=L0+α VЛАΔt,
где L0 - длина ЛА, м; α =1,5-10 - безразмерный коэффициент; vла - скорость движения ЛА, м/с; Δ t - промежуток времени между измерениями, например, с помощью системы АЗН-В координат ЛА, с, причем начало координат области, определяющей местонахождения ЛА, выбирают соответствующим его текущим координатам, а при посадке, например, самолета область, соответствующую наблюдению взлетно-посадочной полосы и прилегающей окрестности, выбирают с центром в точке местоположения самолета, например, кабины пилота с линией визирования по направлению глиссады. При этом координаты других точек ЛА, требуемых для получения зоны возможного столкновения ЛА с подстилающей поверхностью, определяют путем проведения с помощью БЦ ЭВМ 1 соответствующих вычислений. Эти данные передают в блок 8 памяти для получения и формирования на экране индикатора 10 соответствующего изображения подстилающей поверхности.
Одновременно с информацией из блока 8 памяти в блок 9 сравнения через БЦ ЭВМ 1 передают информацию, полученную из блока 3 обзора, причем вначале эту информацию обрабатывают в БЦ ЭВМ 1, проводя стереоотождествление просматриваемой сцены и сцены, выбираемой из базы данных, а затем в блоке 9 сравнения с помощью корреляционного алгоритма осуществляют “привязку” телеизображения к ортоизображению и сигнал, соответствующий величине полученной при этом корреляционной функции, сравнивают с заданным уровнем, определяющим соответствие просматриваемой сцены и сцены, выбираемой из базы данных (см. приложения 2, 3).
В случае соответствия поступивших таким образом на блок 9 сравнения сигналов делают вывод о согласованности рассматриваемой с помощью блока 3 обзора и привязанной в блоке 8 памяти к соответствующим координатам сцен, и соответствующее записанное в блоке 8 памяти изображение подстилающей поверхности воспроизводят на индикаторе 10. При этом на воспроизводимом изображении соответствующее текущее изображение подстилающей поверхности формируют в упрощенном виде с отображением основных ориентиров и/или возможных препятствий, например, в виде пирамид с указанием цифровых значений высот предполагаемых препятствий, находящихся в соответствующих участках подстилающей поверхности, и с помощью средств компьютерной графики БЦ ЭВМ 1 в зависимости от расстояния между предполагаемыми препятствиями и ЛА и соответственно времени подлета к ним производят окрашивание в соответственно зеленый, желтый или красный цвета тех участков поверхности, которые могут представлять опасность при условии сохранения прежнего курса и скорости полета, причем зеленый цвет соответствует безопасному полету, желтый - полету, требующему корректировку курса, а красный цвет соответствует ситуации, в которой пилоту следует принять экстренные меры, чтобы избежать столкновения с препятствием, при этом совмещение изображений, полученных по предварительно сформированным сигналам и при съемке, производят путем координатной привязки ЛА и соответствующих точек подстилающей поверхности.
При этом соответствующее текущее изображение подстилающей поверхности формируют в упрощенном виде с отображением основных ориентиров и/или возможных препятствий, например, в виде пирамид с указанием их высоты.
Совокупность сигналов, соответствующих рельефу подстилающей поверхности на трассе полета или отдельных ее участках, могут также через БЦ ЭВМ 1 передавать на блок 8 памяти ЛА с помощью соответствующего подключения вышеуказанных твердотельных дисков на Flash-памяти, на которых из базы данных соответствующих наземных служб управления полетом (не показаны) записана требуемая информация, или непосредственно из базы данных этих наземных служб управления полетом, причем рельеф подстилающей поверхности на трассе полета ЛА для предварительного формирования соответствующих сигналов во всех случаях задают в виде цифрового представления высот характерных точек этого рельефа относительно, например, уровня моря, полученного по карте местности и/или путем наземной или авиационной или космической топографической съемки.
Анализ возможности продолжения полета в прежнем режиме можно проводить также путем корреляционной обработки в БЦ ЭВМ 1 сигналов, соответствующих текущему изображению подстилающей поверхности, и сигналов, полученных от блока 3 обзора и соответствующих навигационных систем ЛА, с последующей оценкой расхождения величин этих сигналов.
В случае существенного (вышезаданного порогового значения) расхождения сигналов делают вывод о несовпадении ракурса обзора и полученной из блока 8 памяти сцены, и оператор с помощью блока 4 привода изменяет положение телевизионного датчика блока 3 обзора до получения требуемого соответствия сигналов, после чего синтетическую (включающую записанный в блоке 8 памяти сюжет, на который наложена воспринимаемая датчиком блока 3 обзора сцена) раскрашенную в соответствующие расстоянию до препятствий цвета картину воспроизводят на экране (не показан) индикатора 10. Формирование соответствующей картины изображения подстилающей поверхности производят в реальном масштабе времени.
В случае критической близости ЛА до препятствия через динамики блока 12 тревожной сигнализации воспроизводят соответствующий звуковой сигнал.
Сигналы, соответствующие текущим координатам ЛА, формируют во время полета постоянно, а сигналы из предварительно сформированной совокупности, соответствующие рельефу подстилающей поверхности, в течение полета выделяют по запросу пилота ЛА, но постоянно выделяют в сложных полетных условиях, например при полете на малых высотах в горной местности, а также при заходе на посадку, и соответственно в эти периоды времени производят формирование изображения подстилающей поверхности.
Алгоритмы работы вычислителей БЦ ЭВМ 1 и блока 7 определения параметров движения ЛА приведены в приложениях.
ПРИЛОЖЕНИЕ 1
Определение параметров вектора скорости  ЛА
ЛА
Пусть  тогда имеем
тогда имеем

где  - расстояние, пройденное за промежуток времени (ti), причем ti - величина временного промежутка между i-м и (i+1)-м моментами определения координат ЛА, xi, уi, zi - координаты ЛА в i-й момент времени, xi+1, уi+1, zi+1 - соответствующие координаты в (i+1)-й момент времени.
- расстояние, пройденное за промежуток времени (ti), причем ti - величина временного промежутка между i-м и (i+1)-м моментами определения координат ЛА, xi, уi, zi - координаты ЛА в i-й момент времени, xi+1, уi+1, zi+1 - соответствующие координаты в (i+1)-й момент времени.
При этом

(см., например, М.Я. Выгодский “Справочник по высшей математике”. - М.: Наука, 1973, с.133-135).
ПРИЛОЖЕНИЕ 2
Стереоотождествление просматриваемой сцены и сцены, выбираемой из базы данных
Решение задачи стереоотождествления проводят поэтапно:
Вначале осуществляют выбор эталона на одном изображении, например на снимке сцены, получаемой при обзоре подстилающей поверхности, затем находят соответствующий эталону образ на другом изображении (соответственно из совокупности, хранящейся в базе данных), уточняют положение образа, соответствующего эталону, вычисляют трехмерные координаты образа в объектном пространстве и производят оценку соответствия.
Область поиска определяется априорным оцениванием рельефа по высоте путем использования карты местности, причем применена иерархическая стратегия стереоотождествления, основанная на прореживании изображения за счет соответствующей фильтрации.
Для устранения неоднозначности используются эталоны, содержащие информацию о характерных особенностях изображения.
Сцена рассматривается в виде последовательности изображений, причем каждое последующее изображение получают из предыдущего путем фильтрации и прореживания по схеме:
Исходное изображение: fN-1(x,y)

Высокочастотная фильтрация с ядром h(u,v)


Уменьшение размеров в 2 раза

Массив точек, полученных в результате стереоотождествления, далее называют цифровой моделью поверхности (ЦМП). ЦМП подвергают коррекции для построения рельефа с требуемой степенью гладкости (ЦМР). ЦМР задают в земной системе координат (ЗСК), в которой оси Xg и Yg этой системы координат лежат в горизонтальной плоскости, а ось Zg направлена вертикально вверх.
АСК - связанная со снимаемой с помощью блока 3 обзора сценой (снимком подстилающей поверхности) система координат. Оси Ха и Ya этой системы координат лежат в горизонтальной плоскости, а ось Za противонаправлена оптической оси датчика блока 3 обзора. Начало координат расположено в центре проектирования.
Исходные данные: Цифровая модель рельефа - матрица высот H={hij} в узлах равномерной сетки с известными координатами первой точки (xro, yro) и известным шагом сетки (масштабом) по осям Х и Y (mxr, myr). Снимок - матрица оптических плотностей Р={рij} в узлах равномерной сетки с известными координатами первой точки и масштабами по осям Х и Y (mxs, mys). Считаются известными: фокусное расстояние объектива f, например телевизионного датчика, координаты точки отсчета (главной точки) xр, ур, параметры внешнего ориентирования снимка сцены, координаты точки съемки в ЗСК Xf=(xf, yf, zf) и матрица преобразования координат вектора из ЗСК в АСК А={аij}.
Выходные данные: Ортоплан - матрица оптических плотностей O={oij} в узлах равномерной сетки с осями, совпадающими с осями ЗСК. Координаты первой точки сетки совпадают с координатами первой точки ЦМР. Масштабы ортоплана по осям вычисляют исходя из параметров внутреннего и внешнего ориентирования снимка.
Процесс ортотранформирования снимка заключается в присвоении каждой точке ортоплана оптической плотности соответствующей ей точки снимка.
Алгоритм ортотранформирования может быть представлен в виде следующих операций:
- определение числа разбиений сетки ЦМР (nrх, nrу) и масштабов ортоплана (mxo, myo);
- вычисление координат узловых точек ЦМР на снимке;
- вычисление по полученным координатам параметров линейного преобразования точек ортоплана в точки снимка;
- определение координат точек сетки ортоплана в АСК;
- присвоение точкам ортоплана значений оптических плотностей соответствующих точек снимка.
ПРИЛОЖЕНИЕ 3
Привязка телеизображения к ортоизображению с помощью корреляционного алгоритма
Эта привязка рассматривается как задача сравнения двух изображений, представленных массивами точек (пикселями яркости) соответственно F (j,k) и G (m,n) (см., например, Woosug Cho “Relation matching for automatic orientation”, ISPRS, vol. XXXI, Part B3, Vienna, 1996, p.p.111-119, а также S.Yu. Zheltov., A.V. Sibiryakov “Adaptive subpixel cross-corelation in a point correspondence problem”. Optical 3D Measurement Techniques, Zurich, 1997).
Для решения используют априорную информацию о масштабе съемки и углах линии визирования.
Решение этой задачи получают путем использования метода корреляции функций яркостей и нахождения максимума функции корреляции на всей области поиска (глобальный максимум). Коэффициент корреляции Kk(m,n) определяют по формуле
При этом 0≤ Kk(m,n)≤ 1, где Kk(m,n)=1, если эти функции тождественны (изображения идентичны), и Kk(m,n)=0, если функции яркости независимы.
Процедура получения пирамиды эталонных изображений:
1. На изображении выбирают точку привязки.
2. Задают размер пирамиды (Мах - число уровней) и размер окна (J х К), в (общем случае J≠ K).
3. На эталонном изображении вырезают область размером (J*2мах+1)((К*2мах+1).
4. Для этой области строят пирамиду изображений для этой области.
5. Level=Max. Берут изображение с верхнего уровня пирамиды.
6. Если уровень ≥ нижнему уровню, то выполнять п.7, иначе п.10.
7. Если размер изображения больше размера окна, то п.8, иначе п.9.
8. Вырезают область размером J× К, где центр области - точка привязки.
9. Опускаются на уровень ниже и идут на п.6.
10. Выход.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ВЕРТОЛЕТА С НАЗЕМНЫМИ ПРЕПЯТСТВИЯМИ | 2009 |
|
RU2397549C1 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2007 |
|
RU2356099C1 |
| СИСТЕМА ВИЗУАЛИЗАЦИИ ПОЛЕТА И КОГНИТИВНЫЙ ПИЛОТАЖНЫЙ ИНДИКАТОР ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497175C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ ОБ ОБЪЕКТАХ НА МЕСТНОСТИ | 2006 |
|
RU2341819C2 |
| КОМПЛЕКСНАЯ СИСТЕМА УПРАВЛЕНИЯ ПОСАДКОЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2518434C2 |
| ПАССИВНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИЗЛУЧАЮЩЕГО ОБЪЕКТА | 1998 |
|
RU2134891C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И СПОСОБ ЗАХОДА НА ПОСАДКУ | 2004 |
|
RU2273590C1 |
| СПОСОБ ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ ВИХРЕВОЙ БЕЗОПАСНОСТИ ПОЛЕТА ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2496121C1 |
Изобретение относится к авиации и может быть использовано в воздушной навигации для предотвращения столкновения летательного аппарата (ЛА) с подстилающей поверхностью. Технический результат заключается в повышении безопасности полета. Сущность изобретения состоит в том, что в полете формируют сигналы рельефа подстилающей поверхности путем ее прямого наблюдения с борта ЛА, а также сигналы, соответствующие упомянутому рельефу в области местонахождения ЛА, предварительно записанному в базе данных, причем формирование сигналов производят на индикаторе ЛА в ракурсах, соответствующих ракурсу наблюдения, производят сравнение соответствия этих сигналов, и в случае расхождения проводят корректировку сформированного на индикаторе ЛА изображения подстилающей поверхности в соответствии с реально наблюдаемой обстановкой, после чего определяют возможность продолжения полета в прежнем режиме. 13 з.п. ф-лы, 1 ил.
L=L0+α VЛАΔt,
где L0 - длина ЛА, м;
α =1,5-10 - безразмерный коэффициент;
VЛА - скорость движения ЛА, м/с;
Δ t - промежуток времени между измерениями координат ЛА, с.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ЗЕМЛЕЙ | 1993 |
|
RU2124760C1 |
| УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 1995 |
|
RU2153195C1 |
| Устройство для сжатия сигнала по времени | 1975 |
|
SU565399A2 |
| Устройство для выпрямления опрокинувшихся на бок и затонувших у берега судов | 1922 |
|
SU85A1 |
| US 5892462 А, 06.04.1999. | |||

