Изобретение относится к управлению движением поездов, а именно, к путевым устройствам, взаимодействующим с поездом, и определяет факт прохода, направление движения и скорость колеса; осуществляет счет количества осей с учетом направления движения; выполняет непрерывный самоконтроль исправности и положения относительно рельса и осуществляет передачу полученной информации системе верхнего уровня по линии связи.
Известно изобретение «Путевой датчик» (патент №2169677 от 19.05.1999), содержащий постоянный магнит и два магниточувствительных элемента, включенные в цепи обратной связи двух генераторов и ориентированные так, что магнитные силовые линии замыкаются через магниточувствительные элементы, выполненные в виде катушек индуктивности, и зону прохождения реборды колеса, отличающийся тем, что он дополнительно содержит "PIC-контроллер" с самоадаптирующейся программой и диапазоном рабочих температур от -55 до 125°С, предназначенный для фиксации факта прохождения колеса и формирования сообщений о направлении и скорости движения подвижной единицы, подключенный к выходам двух генераторов, выполненных в виде генераторов прямоугольных импульсов, при этом катушки размещены на замкнутых ферритовых магнитопроводах.
Первым недостатком данного изобретения является использование факта изменения только частоты автогенератора для обнаружения оси над датчиком, что ненадежно, т.к. в практике встречаются колеса, изготовленные из материала с низким коэффициентом магнитной проницаемости, что приводит к незначительному изменению частоты генерации и, соответственно, к резкому снижению реальной чувствительности датчика. Вторым существенным недостатком является использование в катушках ферромагнитных магнитопроводов, которые имеют нестабильность свойств во времени из-за различий в температурах, и также обуславливают разную чувствительность к колесам, изготовленным из разных материалов. Кроме того, отсутствует функция определения правильности фиксации датчика на рельсе.
Известна полезная модель «Датчик считывания осей (ДСО), устройство считывания осей» (патент №125951 от 19.06.12), выполненный с возможностью подачи необходимого питания на требующие питания элементы, содержащий первый генератор, вход которого является первым входом ДСО, а выход подключен к первому амплитудному детектору, второй генератор, вход которого является вторым входом ДСО, а выход подключен к второму амплитудному детектору, отличающийся тем, что содержит третий генератор, вход которого является третьим входом ДСО, а выход подключен к третьему амплитудному детектору, причем выходы первого второго и третьего амплитудных детекторов подключены соответственно к первому, второму и третьему входам устройства преобразования и управления (УПУ), первый выход которого соединен с первым выходом ДСО через последовательно соединенные первую гальваническую развязку (ГР) и первый трансивер (ТР), второй выход УПУ соединен с вторым выходом ДСО через последовательно соединенные вторую ГР и второй ТР, третий выход УПУ соединен с третьим выходом ДСО через последовательно соединенные третью ГР и третий ТР, а дополнительный выход каждого из трансиверов соединен соответственно с четвертым, пятым, шестым входом УПУ через соответственно четвертую, пятую, шестую ГР, а информационный порт (ИП) УПУ подключен к ИП ДСО через последовательно соединенные седьмую ГР и трансивер шины CAN.
Недостатками данного технического решения являются: большое количество оборудования, использование для проверки фиксации датчика на рельсе третьей катушки и соответствующей схемы, необходимость большого количества проводов для передачи данных на пост. Кроме того, использование для передачи только шины CAN ограничивает дальность передачи до 1 км, а функция обогрева требует электропитания достаточно большой мощности в месте установки датчика, т.е. больших дополнительных затрат.
Наиболее близким решением, взятым за прототип, является изобретение «Способ фиксации проследования колеса подвижного состава по участку пути и устройство для его осуществления» (патент №2323120 от 11.08.2006), включающий измерение выходных напряжений 1-го рельсового датчика при отсутствии и наличии над ним колеса, сравнение величин полученных напряжений и получение выходного сигнала, определяющего факт проследования колеса над 1-м рельсовым датчиком, отличающийся тем, что при проследовании колеса над 1-м рельсовым датчиком определяют момент времени появления экстремального значения его выходного напряжения, измеряют выходное напряжение 2-го рельсового датчика, сравнивают его с заданным первым пороговым диапазоном напряжений и в результате сравнения определяют факт проследования колеса по участку пути. Способ фиксации проследования колеса подвижного состава по участку пути по п.1, отличающийся тем, что в момент времени появления экстремального значения выходного напряжения 1-го рельсового датчика измеряют выходные напряжения 2-го, 3-го,… и N-го рельсовых датчиков, сравнивают их с заданными 1-м, 2-м,… и (N-1) пороговыми диапазонами напряжений соответственно и в результате сравнений определяют факт проследования колеса по участку пути. Устройство для осуществления способа фиксации проследования колеса подвижного состава по участку пути, содержащее N рельсовых датчиков, отличающееся тем, что в него введены амплитудный детектор, 2-й, 3-й,… и (N-1)-й ключи, 2-й, 3-й,… и (N-1)-й компараторы, 2-й, 3-й,… и (N-1)-й задатчики уровней пороговых напряжений и сравнивающее устройство, а выходы 2-го, 3-го,… и (N-1)-го рельсовых датчиков соединены с первыми входами 2-го, 3-го,… и (N-1)-го ключей, вторые входы которых подключены к выходу амплитудного детектора, причем выходы 2-го, 3-го,… и (N-1)-го ключей соединены с первыми входами 2-го, 3-го,… и (N-1)-го компараторов соответственно, вторыми входами подключенных к выходам 2-го, 3-го,… и (N-1)-го задатчиков уровней пороговых напряжений, а выходы 2-го, 3-го,… и (N-1)-го компараторов соединены с входами сравнивающего устройства.
Недостатками данного способа и устройства являются возможность сбоев и ложного учета колесных пар при прохождении над датчиками предметов из материалов, которые не соответствуют колесным парам подвижного состава, и большое количество оборудования, что ведет к снижению надежности функционирования.
Целью изобретения является повышение надежности регистрации прохождения колесных пар именно подвижного состава за счет исключения случаев ложного счета осей, повышение надежности функционирования, за счет дублирования отдельных элементов устройства и упрощение схемы.
Указанная цель по п.1 формулы способа изобретения достигается тем, что наряду с анализом выходного напряжения на выходе амплитудных детекторов датчиков, расположенных вдоль участка пути, при прохождении колесных пар одновременно проверяют в какую сторону и насколько изменяется частота генерации автогенераторов. Указанная цель по п.2 формулы изобретения достигается тем, что введены двухвходовая логическая схема "ИЛИ" и второй контроллер, который имеет линии связи с первым контроллером, при этом выход первого контроллера подключен к первому входу схемы "ИЛИ", выход второго контроллера ко второму входу схемы "ИЛИ", а выход схемы "ИЛИ" подключен на вход элемента гальванической развязки, выход которого через узел передачи данных подключен на выход устройства.
Сущность способа регистрации прохождения колесных пар подвижного состава по участку пути по п.1 формулы заключается в том, что наряду с анализом выходного напряжения на выходе амплитудных детекторов датчиков, расположенных вдоль участка пути, при прохождении колесных пар одновременно проверяют, в какую сторону и насколько изменяется частота генерации автогенераторов, если частота при этом понизилась до некоторого заданного значения, принимают решение, что над чувствительными элементами датчиков прошла именно реборда колеса подвижного состава, которую надо учитывать при счете колесных пар, если при этом частота повысилась, принимают решение, что над чувствительными элементами датчика прошел предмет не из металла, из которого изготовляются колесные пары подвижного состава, и изменение напряжения на выходе амплитудных детекторов в этом случае не учитывают при счете колесных пар подвижного состава.
Сущность изобретения «Устройство для регистрации прохождения колесных пар подвижного состава» по п.2 формулы заключается в том, что в него введены двухвходовая логическая схема "ИЛИ" и второй контроллер, который имеет линии связи с первым контроллером, при этом выход первого контроллера подключен к первому входу схемы "ИЛИ", выход второго контроллера ко второму входу схемы "ИЛИ", а выход схемы "ИЛИ" подключен на вход элемента гальванической развязки, выход первого амплитудного детектора дополнительно подключен на первый вход второго контроллера, выход второго амплитудного детектора подключен дополнительно к второму входу второго контроллера, выход первого автогенератора дополнительно подключен на третьи входы первого и второго контроллеров, а выход второго автогенератора дополнительно подключен на четвертые входы первого и второго контроллеров.
На фиг.1 приведена структурная схема устройства регистрации прохождения колесных пар подвижного состава в соответствии с предложенным изобретением, на фиг.2 - диаграмма изменения напряжений и частоты автогенераторов, поясняющая его работу.
Устройство регистрации 1 содержит два автогенератора 2.1 и 2.2 с катушками индуктивности соответственно 3.1 и 3.2, амплитудные детекторы 4.1 и 4.2, два контроллера 5.1 и 5.2, логический элемент "ИЛИ" 8, элемент гальванической развязки 6 и узел передачи данных 7.
Устройство по предлагаемому способу регистрации прохождения колесных пар подвижного состава работает следующим образом.
Катушки индуктивности 3.1 и 3.2 автогенераторов 2.1 и 2.2 устройства регистрации 1 расположены вдоль участка пути вблизи зоны движения гребня колеса и разнесены друг от друга на расстоянии нескольких сантиметров. Работа устройства основана на том, что появление над катушками металла, из которого сделаны колесные пары подвижного состава, приводит к увеличению активных потерь в контуре и одновременно к увеличению их индуктивности. Это соответственно ведет к уменьшению амплитуды напряжения на выходе автогенераторов и снижению их частоты. С выхода автогенераторов напряжение подается на вход детекторов напряжения и на соответствующие входы контроллеров для определения их текущей частоты. На другие входы контроллеров подается напряжение с выходов детекторов 4.1 и 4.2. При проходе гребня колеса над катушками индуктивности напряжение на выходе амплитудного детектора 4.1, амплитудного детектора 4.2 и частота автогенераторов 2.1 и 2.2 изменяются в соответствии с диаграммами, приведенными на фиг.2, (соответственно кривые 9, 10, 11 и 12). Здесь t0 некоторый момент времени, когда отклонение напряжения на выходе амплитудного детектора 4.1 и отклонение частоты автогенератора 2.1 максимальны от своего установившегося значения, когда реборда колеса над катушкой индуктивности 3.1 отсутствует, a Δt - время запаздывания аналогичных отклонений сигналов на выходе амплитудного детектора 4.2 и автогенератора 2.2. Это время определяется расстоянием между центрами катушек индуктивности 3.1, 3.2 и текущей скоростью подвижного состава в соответствии с выражением  , где S - расстояние между катушками.
, где S - расстояние между катушками.
В соответствии с этими данными в каждом из контроллеров 5.1, 5.2, работающих параллельно в реальном масштабе времени, программными средствами сначала определяют, повысилась или понизилась частота при появлении отклонений по напряжению на выходе амплитудных детекторов. Если частота автогенераторов повысилась, это однозначно указывает, что над датчиком предмет не из металла из которого изготовляются колесные пары и, соответственно, это не ось, которую нужно учитывать. Если частота понизилась до некоторого критического значения, принимается решение, что возможна над датчиком именно реборда колеса. При этом окончательное решение (считать или не считать это отклонение по напряжению за ось колеса) принимается после ухода металла с учетом характера изменения напряжения при проходе. Если величина отклонений находится в диапазоне, соответствующем диаметрам колеса подвижного состава, и форма изменения амплитуды соответствует круглому предмету, эти отклонения учитывают как ось колеса подвижного состава. В противном случае эти отклонения, как ось колеса, не учитывается. Таким образом, в устройстве повышается надежность выделения именно реборды колеса подвижного состава. Повышение частоты автогенераторов и увеличение амплитуды напряжения на выходе автогенераторов контроллерами воспринимается как отвал устройства регистрации 1 от рельса.
На основании этих данных в контроллерах 5.1 и 5.2 программными средствами определяются направление и скорость прохождения колесных пар, общее количество колесных пар, которые прошли по участку пути в одном направлении, направление прохода последней колесной пары, а также формируются данные об исправности автогенераторов 3.1 и 3.2 и амплитудных детекторов 4.1, 4.2. Эти данные используются для формирования соответствующего пакета данных о прохождении колесных пар и обо всех обнаруженных неисправностях, предназначенных для передачи на выход устройства (на пост - в систему более высокого уровня).
Кроме этого, контроллеры, за время, оговоренное для периода передачи данных на выход устройства, по линиям связи между собой осуществляют обмен пакетами данных, предназначенных для передачи в системы верхнего уровня, и, в случае расхождения значений, устанавливают в своем пакете данных соответствующий бит ошибки. Передача информации на входы "ИЛИ" осуществляется поочередно от каждого контроллера и затем через элемент гальванической развязки и узел передачи данных поступает на выход устройства, представляющего собой токовую петлю 20-мА или всего два провода. Такое построение устройства позволяет значительно упростить схему, повысить надежность функционирования и передать в системы верхнего уровня всю необходимую информацию о прохождении колесных пар по участку пути и обо всех предотказных состояниях.
Таким образом, применение предлагаемого технического решения позволяет повысить надежность фиксации факта прохождения колесных пар именно подвижного состава, повысить надежность функционирования и упростить схему.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГИСТРАЦИИ ПРОХОЖДЕНИЯ КОЛЕСНЫХ ПАР ПОДВИЖНОГО СОСТАВА ПО УЧАСТКУ ПУТИ | 2015 |
|
RU2610733C1 |
| СПОСОБ ФИКСАЦИИ ПРОСЛЕДОВАНИЯ КОЛЕСА ПОДВИЖНОГО СОСТАВА ПО УЧАСТКУ ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2323120C1 |
| УСТРОЙСТВО КОНТРОЛЯ ПРОСЛЕДОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 1999 |
|
RU2248898C2 |
| ПУТЕВОЙ ДАТЧИК | 1999 |
|
RU2169677C2 |
| Устройство для контроля проследования железнодорожного подвижного состава | 1985 |
|
SU1444213A1 |
| ПУТЕВОЙ ДАТЧИК | 2006 |
|
RU2317222C1 |
| ПУТЕВОЙ ДАТЧИК | 2008 |
|
RU2372232C1 |
| УСТРОЙСТВО ДЛЯ СЧЕТА ОСЕЙ ЖЕЛЕЗНОДОРОЖНЫХ ПОДВИЖНЫХ СОСТАВОВ (ВАРИАНТЫ) | 1993 |
|
RU2092354C1 |
| Способ повышения устойчивости работы датчика регистрации прохода колеса к воздействию температуры окружающей среды и бросков тягового тока и соответствующий датчик регистрации прохода колеса | 2017 |
|
RU2641366C1 |
| ПУТЕВОЙ ДАТЧИК | 2008 |
|
RU2370393C1 |

Изобретение относится к области автоматики на железнодорожном транспорте. В способе проводят анализ выходного напряжения на выходе амплитудных детекторов датчиков при прохождении колесных пар, одновременно проверяют, как изменяется частота генерации автогенераторов. Причем если частота понизилась до некоторого заданного значения, принимают решение, что прошла именно реборда колеса, которую надо учитывать при счете колесных пар, если частота повысилась, принимают решение, что прошел предмет не из металла, и изменение напряжения на выходе амплитудных детекторов в этом случае не учитывают при счете колесных пар. Устройство содержит два электронных автогенератора, первый и второй амплитудные детекторы, контроллер, устройство гальванической развязки и узел передачи данных. Дополнительно введены двухвходовая логическая схема "ИЛИ", второй контроллер и линия связи. Достигается повышение надежности регистрации прохождения колесных пар. 2 н.п. ф-лы, 2 ил.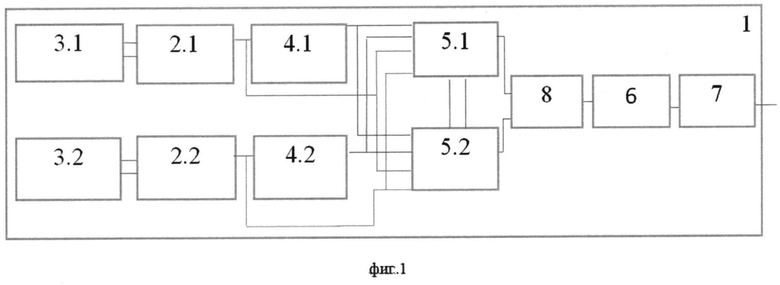
1. Способ регистрации прохождения колесных пар подвижного состава по участку пути, включающий измерение напряжений на выходе рельсовых индуктивных датчиков, при отсутствии и проследовании над ними колеса, определение момента максимального отклонения напряжения на выходе первого по ходу движения датчика относительно значения, когда колесо отсутствовало, и сравнение в этот момент значений выходных напряжений датчиков с некоторыми пороговыми диапазонами напряжений, в результате чего устанавливается факт проследования колеса по участку пути, отличающийся тем, что наряду с анализом выходного напряжения на выходе амплитудных детекторов датчиков, расположенных вдоль участка пути, при прохождении колесных пар одновременно проверяют, в какую сторону и насколько изменяется частота генерации автогенераторов, если частота при этом понизилась до некоторого заданного значения, принимают решение, что над чувствительными элементами датчиков прошла именно реборда колеса подвижного состава, которую надо учитывать при счете колесных пар, если при этом частота повысилась, принимают решение, что над чувствительными элементами датчика прошел предмет не из металла, из которого изготовляются колесные пары подвижного состава, и изменение напряжения на выходе амплитудных детекторов в этом случае не учитывают при счете колесных пар подвижного состава.
2. Устройство для регистрации прохождения колесных пар подвижного состава, содержащее два электронных автогенератора, катушки индуктивности которых расположены вдоль поверхности датчика вблизи зоны движения гребня колеса и разнесены друг от друга на расстояние нескольких сантиметров, первый и второй амплитудные детекторы, на входы которых подключены выходы соответствующих генераторов, а выходы детекторов подключены соответственно к первому и второму входу контроллера, выход которого через последовательно соединенные устройство гальванической развязки и узел передачи данных связан с выходом устройства, отличающееся тем, что в него введены двухвходовая логическая схема "ИЛИ" и второй контроллер, который имеет линии связи с первым контроллером, при этом выход первого контроллера подключен к первому входу схемы "ИЛИ", выход второго контроллера ко второму входу схемы "ИЛИ", а выход схемы "ИЛИ" подключен на вход элемента гальванической развязки, выход первого амплитудного детектора дополнительно подключен на первый вход второго контроллера, выход второго амплитудного детектора подключен дополнительно к второму входу второго контроллера, выход первого автогенератора дополнительно подключен на третьи входы первого и второго контроллеров, а выход второго автогенератора дополнительно подключен на четвертые входы первого и второго контроллеров.
| СПОСОБ ФИКСАЦИИ ПРОСЛЕДОВАНИЯ КОЛЕСА ПОДВИЖНОГО СОСТАВА ПО УЧАСТКУ ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2323120C1 |
| УСТРОЙСТВО ДЛЯ СЧЕТА ОСЕЙ ЖЕЛЕЗНОДОРОЖНЫХ ПОДВИЖНЫХ СОСТАВОВ | 1993 |
|
RU2092351C1 |
| RU 2063894 C1, 20.07.1996 | |||
| US 3395341 A1, 30.07.1968 | |||

