Изобретение относится к гироскопической приборостроительной технике и может быть использовано для построения силовых и индикаторных гироскопических вертикалей.
Известны центральные гироскопические вертикали (ЦГВ) различных модификаций (см. Центральная гироскопическая вертикаль. Техническое описание и инструкция по эксплуатации. М.: Оборонгиз, 1961; Аппаратура измерения курса и вертикали на воздушных судах гражданской авиации. Под общей ред. П.А. Иванова. М.: Машиностроение, 1989), которые представляют собой двухосный силовой гироскопический стабилизатор, снабженный системами продольной и поперечной коррекции и двумя контурами ускоренного восстановления. Конструктивно ЦГВ состоит из платформы, которая помещена в двухосный подвес и на которой размещены два двухстепенных гироскопа (гироблока), оси подвеса (оси прецессии) которых параллельны плоскости платформы и перпендикулярны соответствующим осям стабилизации, а векторы угловых скоростей роторов гиромоторов - векторы кинетических моментов гироблоков имеют противоположное направление. С осями подвеса гироблоков кинематически связаны датчики углов прецессии (потенциометры), которые электрически соединены (без усилителей) с соответствующими стабилизирующими моторами, и датчики моментов, которые электрически соединены с маятниковыми чувствительными элементами (один двухкоординатный или два однокоординатных) в виде электролитических уровней. Гироблоки имеют название, определяемое названием коррекции: гироблок продольной коррекции размещен на платформе таким образом, что ось подвеса перпендикулярна оси подвеса платформы, а у гироблока поперечной коррекции ось подвеса параллельна оси подвеса платформы (перпендикулярна оси подвеса наружной рамы). При этом датчик углов прецессии гироблока поперечной коррекции соединен со стабилизирующим мотором, кинематически связанным с осью подвеса наружной рамы, а датчик углов прецессии гироблока продольной коррекции соединен со стабилизирующим мотором, кинематически связанным с осью подвеса платформы. Кинематическая связь стабилизирующих моторов с осями подвеса осуществляется через редукторы, а в качестве стабилизирующих моторов используются двухфазные управляемые двигатели серии ДИД-05с. Устройство ускоренного восстановления (устройство электрического арретирования) ЦГВ включает в себя: два маятника ускоренного восстановления (МУВ), которые установлены на платформе и имеют вертикальные оси вращения (с целью увеличения контактного давления в контактном датчике углов, кинематически связанном с осью подвеса МУВ). В качестве исполнительных двигателей системы ускоренного восстановления, к которым подключаются МУВ, используются соответствующие стабилизирующие моторы: одна обмотка управления используется в канале силовой стабилизации, а вторая обмотка управления - в канале ускоренного восстановления. Устройство ускоренного восстановления включается с помощью задатчика ускоренного восстановления (кнопки арретирования) и группы управляемых коммутаторов (реле). Узла логического контроля, который определяет работоспособность контуров силовой стабилизации, в ЦГВ не предусмотрено.
Устройство ускоренного восстановления, реализованное в ЦГВ, имеет конструктивный недостаток, состоящий в том, что для реализации данного режима используются дополнительные маятники с контактными датчиками углов, которые, с одной стороны, являются ненадежными элементами и при работе искрят, а с другой стороны, маятниковые грузы при восстановлении из завалов бьются об упоры, что может вызвать автоколебания платформы относительно плоскости горизонта (в течение времени арретирования) и как следствие - снижение надежности и точности ускоренного восстановления. Кроме того, МУВ с вертикальной осью подвеса, имея преимущества в создании контактного давления, очень чувствительны к тангенциальным ускорениям, обусловленным угловыми ускорениями, которые возникают при приведении оси платформы на вертикаль места. Кроме того, ЦГВ не имеет узла логического контроля контуров силовой стабилизации, что затрудняет сделать правильное суждение о работоспособности ЦГВ при некоторых условиях эксплуатации или надежно идентифицировать отказ прибора. Применение редукторов в схеме передачи моментов от стабилизирующих моторов на оси подвеса имеет ряд недостатков: необходимо устранять люфты в редукторах, которые в свою очередь становятся источниками дополнительных возмущающих моментов при колебании летательного аппарата относительно осей, совпадающих с осями подвеса (инерционные моменты роторов стабилизирующих моторов и моменты противоЭДС, которые умножаются на квадраты передаточных чисел редукторов).
Известна также схема силовой малогабаритной гироскопической вертикали (МГВ) серии МГВ-1СК (Малогабаритная гировертикаль МТБ-1С. Техническое описание и инструкция по эксплуатации. М.: Машиностроение, 1974), которая по построению контуров коррекции и стабилизации полностью идентична ЦГВ. Отличие состоит лишь в элементной базе, которая применяется при построении указанных контуров: в ЦГВ в качестве датчиков моментов (коррекционных моторов) используются двухфазные индукционные двигатели серии ДИД-05р с рычажной передачей, а в МГВ-1СК - миниатюрный электромагнитный датчик силы; в ЦГВ в качестве стабилизирующих моторов используются двухфазные индукционные двигатели серии ДИД-05с, а в МГВ-1СК - двухфазные индукционные двигатели серии ДМ-0.1А с улучшенными техническими характеристиками. В отличие от ЦГВ в МГВ-1СК имеется узел логического контроля работы контуров стабилизации, который состоит из механических упоров с контактными датчиками (по два контактных упора на каждый гироблок) включенных параллельно и двух управляемых коммутаторов (реле). Если один из гироблоков отклоняется на максимальный угол, что возможно, когда гиромотор начал терять обороты и соответственно уменьшаться кинетический момент, или произошло нарушение контакта в цепи передачи сигнала на стабилизирующий мотор, или возрос возмущающий момент до недопустимой величины и гироскоп коснулся упора, то замыкается контактная группа одного из электрических упоров и при этом подается, например, +27 В на реле, которое, срабатывая, выдает сигнал ОТКАЗ.
Устройство ускоренного восстановления силовой гировертикали МГВ-1СК имеет те же недостатки, что устройство ускоренного восстановления ЦГВ. Однако схема узла логического контроля также несовершенна, так как построена на контактных логических элементах и электромагнитных реле, что существенно снижает надежность ее работы. Так как стабилизирующие моторы имеют с осями подвеса кинематические связи в виде редукторов, то контуры стабилизации МГВ имеют те же недостатки, что и аналогичные контуры в ЦГВ.
Известна также силовая гировертикаль МГВ-1СК серии 01 (Малогабаритная гировертикаль МГВ-1С серия 01. Техническое описание, дополнение к техописанию МГВ-1С. М.: Машиностроение. 1976), устройство стабилизации, ускоренного восстановления и контроля которой принято за прототип предлагаемого изобретения. Силовая гировертикаль МГВ-1СК серии 01 содержит платформу, которая помещена в двухстепенной кардановый подвес, с осями которого кинематически связаны: с осью подвеса наружной рамы - датчик углов крена и первый стабилизирующий мотор посредством редуктора; с осью подвеса платформы - датчик углов тангажа и второй стабилизирующий мотор также посредством редуктора. Входы стабилизирующих моторов соединены с соответствующими выходами усилителей мощности. На платформе установлено два двухстепенных гироблока поперечной и продольной коррекции, с осями подвеса которых кинематически связаны датчики углов прецессии (индуктивные датчики угла), выходы которых подключены ко входам соответствующих предварительных усилителей (усилителей напряжения), и датчики моментов, входы которых соединены (возможно через усилители коррекции) с соответствующими выходами маятниковых чувствительных элементов, представляющие собой электролитические уровни. Механическими упорами, ограничивающими углы поворота гироблоков, являются контактные датчики (по два на каждый гироблок), жестко закрепленные на корпусе гироблоков (на платформе) и замыкаемые подвижным изоляционным пальцем, жестко связанным с гироблоком, при отклонении последнего на предельные углы. Четыре контактных датчика включены таким образом, что образуют четырехвходовой элемент ИЛИ, выход которого соединен с двумя аналоговыми коммутаторами (электромагнитными реле), подключение которых к четырехвходовому элементу ИЛИ с позиции логических схем можно интерпретировать следующим образом: один коммутатор подключен непосредственно, а второй через логический элемент НЕ. С выходов аналоговых коммутаторов подаются сигналы "+27В отказ" и "+27В исправность" на табло приборной доски.
Устройство ускоренного восстановления, реализованное в МГВ-1СК серии 01, имеет конструктивный недостаток, состоящий в том, что для реализации данного режима используются дополнительные маятники - МУВ с контактными датчиками углов, которые, с одной стороны, являются ненадежными элементами и при работе искрят, а с другой стороны, маятниковые грузы при восстановлении из завалов бьются об упоры, что может вызвать автоколебания платформы относительно плоскости горизонта (в течение времени арретирования) и как следствие - снижение надежности и точности ускоренного восстановления. Кроме того, МУВ с вертикальной осью подвеса, имея преимущества в создании контактного давления, очень чувствительны к тангенциальным ускорениям, обусловленным угловыми ускорениями, которые возникают при приведении оси платформы на вертикаль места, что приводит к дополнительным динамическим ошибкам.
Конструктивная схема узла логического контроля также несовершенна, так как построена на контактных логических элементах и электромагнитных реле, что существенно снижает надежность ее работы. Так как стабилизирующие моторы имеют с осями подвеса кинематические связи в виде редукторов, то контуры стабилизации МГВ-1СК серии 01 имеют те же недостатки, что и аналогичные контуры в ЦГВ и в МГВ- 1СК: повышенные динамические возмущающие моменты при колебаниях летательного аппарата относительно осей, совпадающих с осями подвеса платформы и, как следствие, - повышенные ошибки стабилизации, а при некоторых условиях эксплуатации возникает выбиваемость гироблоков.
Задача настоящего изобретения состоит в повышении надежности и точности работы устройства стабилизации, ускоренного восстановления и контроля силовых гироскопических вертикалей.
Поставленная задача достигается тем, что в устройство стабилизации, ускоренного восстановления и контроля силовой гироскопической вертикали, с осью подвеса наружной рамы которой кинематически связаны датчик углов крена и первый стабилизирующий мотор, на вход которого подключен выход со осью подвеса, первого усилителя мощности, с осью подвеса платформы, установленной в наружной раме своими полуосями кинематически связаны датчик углов тангажа и второй стабилизирующий мотор, причем на платформе размещены двухстепенные гироскопы поперечной и продольной коррекции, на осях подвеса которых соответственно установлены датчики углов прецессии, выходы которых подключены ко входам первого и второго предварительных усилителей, и датчики моментов, ко входам которых через усилители коррекции подключены маятниковые чувствительные элементы поперечной и продольной коррекции, содержащее задатчик ускоренного восстановления и узел логического контроля, состоящий из четырехвходового логического элемента ИЛИ, выход которого соединен с первым входом аналогового коммутатора ОТКАЗ и с входом логического элемента НЕ, выход которого подключен к первому входу аналогового коммутатора ИСПРАВНОСТЬ, введены первый и второй суммирующие усилители, выходы которых подключены к соответствующим усилителям мощности, первый - четвертый компараторы, при этом входы первого и второго компараторов соединены с выходом маятникового чувствительного элемента поперечной коррекции, а входы третьего и четвертого компараторов подключены к маятниковому чувствительному элементу продольной коррекции, а выходы компараторов соединены с соответствующими первыми входами первого-четвертого аналоговых коммутаторов, при этом выходы первого и второго аналоговых коммутаторов подключены к первому и второму входам первого суммирующего усилителя, на третий вход которого подключен выход первого предварительного усилителя, а выходы третьего и четвертого аналоговых коммутаторов подключены к первому и второму входам второго суммирующего усилителя, третий вход которого соединен с выходом второго предварительного усилителя, причем выходы первого и второго предварительных усилителей подключены соответственно к первому и второму входам узла логического контроля, третий вход которого соединен с выходом задатчика ускоренного восстановления, который этим же выходом соединен со вторыми управляющими входами первого-четвертого аналоговых коммутаторов, при этом в узел логического контроля ведены четыре компаратора, выходы которых подключены к соответствующим входам четырехвходового элемента ИЛИ, входы первого и второго компараторов соединены с выходом первого предварительного усилителя, а входы третьего и четвертого компараторов соединены с выходом второго предварительного усилителя, причем вторые управляемые входы аналоговых коммутаторов ОТКАЗ и ИСПРАВНОСТЬ соединены с выходом задатчика ускоренного восстановления через логические элементы НЕ, причем первый и второй стабилизирующие моторы выполнены как моментные двигатели постоянного тока с возбуждением от постоянных магнитов, кинематически связанные с осями подвеса наружной рамы и платформы по безредукторной схеме, а маятниковые чувствительные элементы поперечной и продольной коррекции являются акселерометрами.
На фиг. 1 изображена кинематическая схема силовой гировертикали с блоком устройства стабилизации, ускоренного восстановления и контроля; на фиг. 2 представлена блок-схема устройства стабилизации, ускоренного восстановления и контроля; на фиг. 3 - блок-схема узла логического контроля исправности работы контуров силовой стабилизации гировертикали.
В соответствии с фиг. 1 на кинематической схеме силовой гировертикали приняты следующие обозначения: 1 - наружная рама, установленная своими полуосями в корпусе прибора; 2 - платформа, установленная своими полуосями в наружной раме; 3 - двухстепенной гироскоп продольной коррекции; 4 - двухстепенной гироскоп поперечной коррекции; 5,6 - датчики углов прецессии двухстепенных гироскопов продольной и поперечной коррекции; 7,8 - датчики моментов двухстепенных гироскопов продольной и поперечной коррекции; 9,10 - маятниковые чувствительные элементы продольной и поперечной коррекции (в виде акселерометров, например, типа АТ-1104 с порогом чувствительности не более 0,0005g и диапазоном измерения 0,2g-0,5g, где g - ускорение силы тяжести); 11,13 - первый и второй стабилизирующие моторы (моментные двигатели постоянного тока с возбуждением от постоянных магнитов, например, типа ДМ-5 или ДС-27); 12,14 - датчики углов крена и тангажа; 31 - узел логического контроля; 32 - задатчик ускоренного восстановления; 33 - узел формирования управляющих напряжений контуров стабилизации и ускоренного восстановления.
Кроме того, на фиг. 1 приняты следующие буквенные обозначения: OX - ось подвеса наружной рамы; ОХп, OYп, OZп - оси, связанные с платформой; OZп - ось подвеса платформы; OZ1, ОX2 - оси подвеса двухстепенных гироскопов поперечной и продольной коррекции; OZА, OXA - входные оси акселерометров поперечной и продольной коррекции; H1, H2 - кинетические моменты двухстепенных гироскопов поперечной и продольной коррекции; α- угол поворота платформы относительно плоскости горизонта вокруг оси OXп; β-угол поворота платформы относительно плоскости горизонта вокруг оси OZп; δ1- угол поворота (прецессии) двухстепенн ого гироскопа поперечной коррекции относительно платформы; δ2- угол поворота (прецессии) двухстепенного гироскопа продольной коррекции относительно платформы.
Блок-схема устройства стабилизации, ускоренного восстановления и контроля в соответствии с фиг. 2 содержит: 15, 16, 24, 25 - первый, второй, третий, четвертый компараторы, предназначенные для сравнения двух сигналов, выходные напряжения которых меняются скачкообразно, если один сигнал превышает другой (первый сигнал - выходной сигнал соответствующего маятникового чувствительного элемента, а второй сигнал - сигнал настройки компаратора); 17, 18, 26, 27 - первый, второй, третий, четвертый аналоговые коммутаторы с двумя управляющими входами, включенными по схеме И и одним сигнальным выходом; 19, 28 - первый и второй суммирующие усилители, состоящие из операционного усилителя, трех входных масштабных сопротивлений R1, R2, R3, сопротивления обратной связи Rос каждый и предназначенные для суммирования напряжений контуров ускоренного восстановления и стабилизации; 21, 23 - первый и второй усилители коррекции (состоящие, например, из модулятора, усилителя напряжения и усилителя мощности); 20, 29 - первый и второй усилители мощности (они могут содержать усилители напряжения, фильтры коррекции и собственно усилители мощности); 22, 30 - первый и второй предварительные усилители (они могут содержать предварительные усилители напряжения, фазочувствительные выпрямители); 31 - узел логического контроля; 32 - задатчик ускоренного восстановления; 33 - узел формирования управляющих напряжений контуров стабилизации и ускоренного восстановления.
На фиг. 2 приняты следующие дополнительные буквенные обозначения: gβ,-gα- ускорения, измеряемые акселерометрами 9 и 10 при положительных углах α и β; Uа - командный сигнал задатчика ускоренного восстановления (электрического арретирования), который принимает значение уровня логической "1", если включается режим ускоренного восстановления, и принимает значение уровня логического нуля "0", если задатчик 32 ускоренного восстановления отключен; ±U0 - опорные напряжения первого-четвертого компараторов, при достижении значений которых срабатывают соответствующие компараторы (эти напряжения соответствуют минимальным углам отклонения платформы, при которых могут начать работать контуры ускоренного восстановления); U1, U2 - выходные напряжения первого 22 и второго 29 предварительных усилителей; ±Uув - напряжение ускоренного восстановления, которое по модулю в N раз больше (обычно N= 1,5-2), чем напряжения предварительных усилителей, когда гироблоки отклонились на максимально допустимые углы δ1(max),δ2(max), которые соответствуют касанию гироблоков механических упоров; Uсм1, Uсм2 - управляющие напряжения первым 11 и вторым 13 стабилизирующими моторами; M1, М2 - моменты, создаваемые первым 11 и вторым 13 стабилизирующими моторами, которые состоят из двух компонент: M1ув, M2ув - моменты ускоренного восстановления, M1с, M2с - моменты стабилизации.
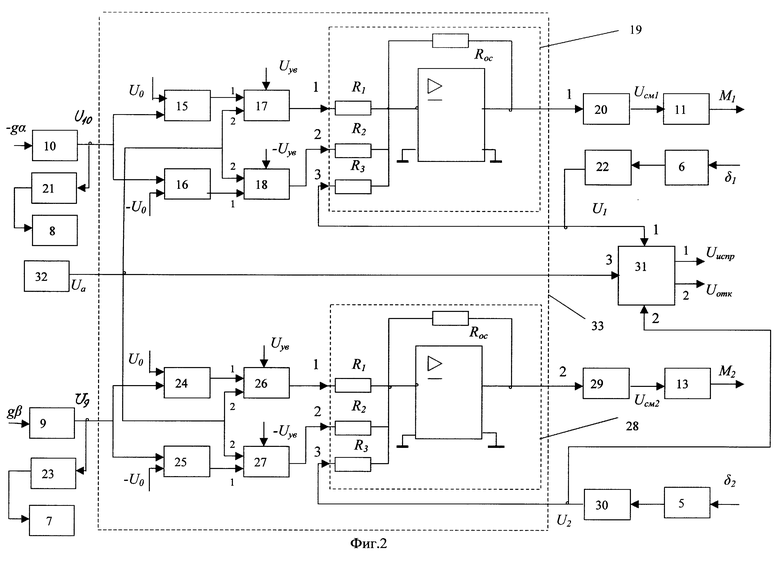
Блок-схема узла логического контроля 31 исправной работы контуров силовой стабилизации представлена на фиг. 3 и содержит: 34, 35, 36, 37 - первый, второй, третий и четвертый компараторы узла логического контроля; 38 - четырехвходовой логический элемент ИЛИ; 39, 41, 42 - логические элементы НЕ; 40, 43 - аналоговые коммутаторы ОТКАЗ и ИСПРАВНОСТЬ с двумя управляющими входами, включенными по схеме И и одним сигнальным выходом.
Кроме того, на фиг. 3 приняты следующие буквенные обозначения: U01 - опорное напряжение компараторов, которое соответствует отклонению гироблоков на максимальные допустимые углы (отклонению до механических упоров); U34, U35, U36, U37 - выходные напряжения соответственно первого-четвертого компараторов, причем, если компаратор сработал, то указанные напряжения принимают значения логической единицы "1", в противном случае - значение логического нуля "0"; U38 - выходное напряжение четырехвходового логического элемента ИЛИ, которое соответствует уровню логической единицы "1", если один из гироблоков отклонился на максимально допустимый угол, в противном случае - значение логического нуля "0"; Uотк, Uиспр - выходные напряжения аналоговых коммутаторов ОТКАЗ и ИСПРАВНОСТЬ, которые возникают только в тех случаях, когда напряжения на первом и втором управляемых входах соответствующих коммутаторов одновременно равняются уровню логической единицы "1".
Взаимосвязь элементов и узлов устройства стабилизации, ускоренного восстановления и контроля силовой гировертикали можно представить в следующей последовательности.
Силовая гировертикаль фиг. 1 представляет двухосный силовой гиростабилизатор, наружная рама 1 которого установлена с помощью полуосей в корпусе прибора и ориентирована вдоль продольной оси самолета. Платформа 2 своими полуосями установлена в наружной раме перпендикулярно оси ее подвеса и при нулевых углах отклонения оси платформы OYn от вертикали ориентирована вдоль поперечной оси самолета. На платформе размещены: гироскопы 3 (4) и маятниковые чувствительные элементы (акселерометры) 9 (10) продольной и поперечной коррекции. С осями прецессии гироскопов 3 (4) кинематически связаны датчики углов 5 (6) и датчики моментов 7 (8), которые соответственно соединены с предварительными усилителями 30 (22) и усилителями коррекции 23 (21), на входы которых подключены маятниковые чувствительные элементы 9 продольной и (10) поперечной коррекции. С осями стабилизации - осями подвеса наружной рамы и платформы соответственно кинематически связаны стабилизирующие моторы 11 и 13, а также датчики углов крена 12 и тангажа 14.
Устройство стабилизации, ускоренного восстановления и контроля фиг. 2 по функциональному назначению можно разделить на две подсистемы: систему стабилизации и ускоренного восстановления, имеющей два идентичных канала (электронная часть представлена узлом формирования управляющих напряжений контуров стабилизации и ускоренного восстановления 33), и узел логического контроля 31.
Для систем стабилизации и ускоренного восстановления относительно осей наружной рамы 1 и платформы 2 входные сигналы формируются датчиками углов прецессии 6 и 5, соединенными с предварительными усилителями 22 и 30, маятниковыми чувствительными элементами 9 продольной и 10 поперечной коррекции, а также задатчиком 32, который блокирует работу коммутаторов 17, 18 и 26, 27 при отключении ускоренного восстановления. Силовыми элементами являются стабилизирующие моторы 11 и 13, которые соединены с усилителями мощности 20 и 29 и которые создают относительно осей подвеса моменты M1 и М2. Электронная схема, обеспечивающая работу системы, представлена узлом 33 формирования управляющих напряжений контуров стабилизации и ускоренного восстановления и содержит два идентичных по структуре контура, состоящих из параллельно включенных компараторов 15,16 (24, 25), которые соединены последовательно с первыми управляющими входами соответствующих аналоговых коммутаторов 17, 18 (26, 27), на вторые управляющие входы которых подается сигнал Uа задатчика 32, который равняется логической "1", если включен режим ускоренного восстановления, или логическому "0", если осуществляется только режим стабилизации, т. е. задатчик 32 выключен. Выходными сигналами коммутаторов 17 и 18 или 26 и 27 являются сигналы Uув и -Uув, которые являются постоянными по величине и выбираются из условия, чтобы напряжение Uув было в N раз больше максимальных напряжений U1(max) U2(max), соответствующих максимальным углам прецессии гироскопов 4 и 3 (это требование соответствует условию работоспособности контуров ускоренного восстановления и обычно N=1,5-2). Сигнальные выходы коммутаторов 17 и 18, 26 и 27, а также выходы предварительных усилителей 22 и 30 подключены соответственно к первым, вторым и третьим входам суммирующих усилителей 19 и 28, выходы которых соединены с усилителями мощности 20 и 29 усилителей стабилизации. Настройка компараторов 15 и 16 или 24 и 25 осуществляется подбором пороговых сигналов U0 и -U0, которые определяют ширину зоны нечувствительности по углам отклонения от вертикали (сигналы U0 и -U0 будут определяться крутизной акселерометров и заданными значениями углов α3 и β3, которые соответствуют точности приведения платформы в плоскость горизонта в режиме ускоренного восстановления). Суммирующие усилители 19 и 28 можно построить на операционных усилителях с обратными связями с помощью сопротивлений Rос, при этом входные цепи (первый, второй и третий входы) организованы на инвертирующем входе с включением в них входных сопротивлений R1 R2 R3. Цепи радиальной поперечной и продольной коррекции состоят из последовательно включенных маятниковых чувствительных элементов 10 и 9, усилителей коррекции 21 (первый усилитель коррекции) и 23 (второй усилитель коррекции), которые могут быть совмещены с маятниковыми чувствительными элементами, и датчиков моментов 8 и 7. Блок-схема узла логического контроля, представленная на фиг. 3, содержит четырехвходовой элемент ИЛИ 38, входы которого эквивалентны по назначению и соединены с четырьмя компараторами, которые определяют какой гироскоп (3 или 4) коснулся левого или правого упоров (отклонился на максимальные углы прецессии). Компараторы 34 (первый) и 35 (второй) сравнивают опорные сигналы U01 и - U01 с сигналом U1 предварительного усилителя 22, пропорционального углу отклонения гироскопа 4, а компараторы 36 (третий) и 37 (четвертый) сравнивают аналогичные опорные сигналы с сигналом U2 предварительного усилителя 30, пропорционального углу отклонения гироскопа 3. Логический элемент ИЛИ 38 соединен с первым управляющим входом аналогового коммутатора ИСПРАВНОСТЬ 43 через логический элемент НЕ, а с первым управляющим входом аналогового коммутатора ОТКАЗ 40 - непосредственно. Вторые управляющие входы аналоговых коммутаторов 40 и 43 подключены через логические элементы НЕ 39 и 42 к задатчику 32. Выходными сигналами узла логического контроля 31 служат сигналы Uотк и Uиспр, которые являются выходными сигналами коммутаторов 40 и 43. При пояснении работы узла логического контроля 31 напряжения входящих в него элементов обозначены в соответствии с номером элемента. Опорные напряжения U0 и -U0, U01 и -U01, Uув и -Uув могут формироваться на делителях напряжения, а Uотк и Uиспр могут являться, например, напряжением бортовой сети: "+27в отказ" и "+27в исправность".
Описание работы устройства представим в виде двух режимов: режима стабилизации с автоматической проверкой исправности работы контуров стабилизации с помощью узла логического контроля и режима ускоренного восстановления с отключением (блокированием) узла логического контроля.
1. Режим стабилизации с автоматической проверкой исправности работы контуров стабилизации с помощью узла логического контроля.
1.1. Работа контуров стабилизации.
В устройстве имеется два идентично работающих контура стабилизации, компенсирующие возмущающие моменты, действующие относительно осей подвеса наружной рамы и платформы. Поэтому достаточно рассмотреть работу одного контура стабилизации, например, относительно оси наружной рамы.
Выражение возмущающего момента Мвх относительно оси наружной рамы имеет вид
Mвх+Мнб+Мттп+Мтк+Mтп+Мтду,
где Мнб - момент небаланса;
Мттп - момент трения в токоподводах;
Мтк - момент трения в коллекторе стабилизирующего мотора;
Мтп - момент трения в опорах подвеса;
Мтду - момент тяжения (трения) в датчике углов крена.
Так как стабилизирующий мотор используется без редуктора, то инерционный возмущающий момент от обкатки редуктора и момент от противоЭДС, возникающие при колебаниях летательного аппарата относительно оси стабилизации будут отсутствовать, что уменьшит суммарный возмущающий момент. Кроме того, когда гировертикаль установлена в амортизаторах, в условиях разбега по полосе за счет ударов колес летательного аппарата о стыки плит могут возникнуть резонансные явления в амортизаторах на частотах близких к собственным частотам контура стабилизации, что может привести к значительному увеличению возмущающих моментов в редукторе, которые вызовут выбиваемость гиростабилизатора. Исключая в силовой цепи редуктор, тем самым устраняется ряд возмущающих моментов, факторов снижающих точность стабилизации.
Работу контура стабилизации рассмотрим в соответствии с кинематической схемой фиг. 1 и блок-схемой фиг. 2. При этом с задатчика ускоренного восстановления 32 во все точки схемы, к которым подключен задатчик, будет поступать сигнал в виде напряжения Uа, соответствующего логическому нулю "0". Так как первые и вторые входы аналоговых коммутаторов 17, 18 объединены по схеме И, то независимо от состояния компараторов 15, 16 указанные коммутаторы будут заблокированы и на их выходах будет организован (подан) нулевой потенциал и, следовательно, только на третий вход первого суммирующего усилителя будет подано напряжение U1 с первого предварительного усилителя контура силовой стабилизации наружной рамы.
Предположим, что относительно оси наружной рамы действует возмущающий момент Мвх < 0. Тогда начинает прецессировать гироскоп поперечной коррекции 4 с угловой скоростью  и с датчика углов 6 снимается напряжение пропорциональное углу прецессии δ1, которое преобразуется и усиливается первым предварительным усилителем 22 до величины U1 и подается на третий вход первого суммирующего усилителя 19 и первый вход узла логического контроля 31. Пройдя тракт усилителя мощности 20, формируется управляющее напряжение первым стабилизирующим мотором 11, которое будет иметь вид
и с датчика углов 6 снимается напряжение пропорциональное углу прецессии δ1, которое преобразуется и усиливается первым предварительным усилителем 22 до величины U1 и подается на третий вход первого суммирующего усилителя 19 и первый вход узла логического контроля 31. Пройдя тракт усилителя мощности 20, формируется управляющее напряжение первым стабилизирующим мотором 11, которое будет иметь вид
где Kду - крутизна датчика углов 6 гироблока 4;
Kпу - коэффициент усиления предварительного усилителя 22;
Kум - коэффициент усиления усилителя мощности 20.
Стабилизирующий мотор 11 создаст относительно оси наружной рамы момент M1, противоположно направленный Мвх
где K1 - коэффициент передачи стабилизирующего мотора по напряжению (K1= Cм/Rсм, где Cм - коэффициент передачи стабилизирующего мотора по току; Rсм - сопротивление обмотки управления (якоря) стабилизирующего мотора).
1.2. Работа узла логического контроля.
Если по какой-то причине гироскопы 3 или 4 отклонятся на максимальные углы ±δ1m или ±δ2m (отклонятся до электрических упоров), то узел логического контроля должен выдать сигнал ОТКАЗ, что соответствует нарушению работы контуров стабилизации и выходу силовой гировертикали из строя. Однако такая ситуация может возникнуть при кратковременном значительном возрастании возмущающих моментов, тогда можно попытаться возвратить работоспособность гировертикали. Для этого следует выйти в горизонтальный полет (например, по линии местного горизонта) и включить задатчик ускоренного восстановления (нажать кнопку арретирования), что соответствует режиму ускоренного восстановления, рассматриваемому в следующем подразделе описания (режим 2).
Прежде чем рассматривать работу узла логического контроля, определим опорное напряжение U01, которое используется при настройке компараторов 34-37. Это напряжение соответствует отклонению гироблоков на максимальные углы, а так как в узле логического контроля в компараторах сравниваются напряжение U01 и напряжение U1 или U2 с предварительных усилителей 22 и 30, то опорное напряжение U01 будет определяться выражением
U01 = KдуKпуδm,
где δm = δ1m = δ2m - максимально допустимый угол отклонения гироблоков, который соответствует электрическому упору (механический упор устанавливается на угле, незначительно превышающем δm).
Предположим, что в данный момент времени гироблок 4 отклонился на максимальный положительный угол, т.е. U1 □ U01 тогда сработает компаратор 34 и на его выходе появится сигнал логической единицы "1" (при этом на выходах компараторов 35-37 будет сигнал логического нуля "0"). На выходе четырехвходового элемента ИЛИ 38 будет сигнал, описываемый логическим уравнением
U38 = U34∪ U35∪ U36∪ U37,
который будет равен логической единице "1". Выходной сигнал U38 подается одновременно в каналы анализа исправной и не исправной работы. Так как задатчик ускоренного восстановления 32 выключен и Uа = 0, то выходные сигналы логических элементов НЕ 39 и 42 будут соответствовать логической единице "1". Учитывая, что U38="1" и первые и вторые входы аналоговых коммутаторов 40 и 43 включены по схеме И, коммутатор 40 сработает и на выход пропустит сигнал U40 = Uотк соответствующий "1", что является признаком отказа контуров стабилизации. Коммутатор 43 не сработает, т.к. на его первый вход подается сигнал логического "0" и, следовательно, на его выходе сигнал Uиспр будет иметь уровень логического "0", что свидетельствует об отсутствии признака исправность. Аналогично будет вести себя схема, если гироскоп 3 или оба гироскопа 3 и 4 одновременно отклонятся до электрических упоров.
Если контуры стабилизации функционируют нормально, то углы отклонения гироскопов 3 и 4 лежат в рабочих зонах
-U01<U1<U01, и -U01<U2<U01,
то обеспечивает из U38="0". Теперь сработает коммутатор канала ИСПРАВНОСТЬ, т.е. на выходе коммутатора 43 будет сигнал U43= Uиспр="1", что является признаком исправной работы контуров стабилизации.
Развернутое логическое уравнение, описывающее работу узла логического контроля, можно представить в следующем виде:
U38 = (U01-U1)∪(-U01-U1)∪(U01-U2)∪(-U01-U2),
где

2. Режим ускоренного восстановления.
Этот режим устройства стабилизации, ускоренного восстановления и контроля используется перед полетом при запуске прибора и в горизонтальном полете после выполнения маневров (когда платформа " выбивается" или имеет большие уходы вследствие отключения коррекции) для быстрого приведения платформы в горизонтальное положение из любых завалов.
Включение контуров ускоренного восстановления, как при запуске гировертикали, так и в горизонтальном полете, после совершения маневров осуществляется подачей сигнала АРРЕТИРОВАНИЕ Uа с задатчика ускоренного восстановления 32, который в этом режиме принимает значение логической единицы "1". При этом поступают разрешающие сигналы в узел формирования управляющих напряжений контуров стабилизации и ускоренного восстановления 33 и блокируется информация с узла логического контроля 31 о работоспособности системы.
Рассмотрим работу устройства ускоренного восстановления при положительных углах α и β. При отклонениях платформы от плоскости горизонта на углы α и β с акселерометров продольной и поперечной коррекции 9 и 10 снимаются сигналы (в случае отсутствия ускорений самолета)
U9=Kаgsin (β) и
U10=-Kаgsin (α) ,
где Kа - коэффициент передачи акселерометра;
g - ускорение свободного падения;
α,β- углы отклонения платформы от горизонтального положения вокруг осей наружной рамы и платформы.
Если углы α и β составляют десятки угловых минут (до единиц градусов), то напряжения с акселерометров можно считать линейными функциями этих углов (для работы устройства ускоренного восстановления это обстоятельство не играет существенной роли)
U9=Kag β и
U10=-Kаg  .
.
Так как каналы ускоренного восстановления идентичны, то рассмотрим более подробно работу одного канала, например, арретирование относительно оси наружной рамы.
Сигнал U10 поступает на входы двух параллельно соединенных компараторов 15 и 16, на которые также подается опорное напряжение U0, выбираемое исходя из заданного порогового значения угла α3 срабатывания компараторов 15 и 16 устройства ускоренного восстановления, которое можно принять за точность приведения платформы в плоскость местного горизонта (оси платформы OYп на вертикаль). Так, например, если α3 = 15 угл.мин., Kа=5в/g, то U10=21,8 мВ. Значит, формируем опорное напряжение компараторов 15 и 16 U0=±21,8 мВ. Работа компараторов 15 и 16 зависит от соотношения опорных сигналов ±U0 и сигнала акселерометра 10. Если выполняется условие U10≥U0, то срабатывает компаратор 15, на выходе которого появится сигнал логической "1", который подается на первый вход аналогового коммутатора 17. На второй вход аналогового коммутатора 17 подается сигнал арретирования Uа, соответствующий логической "1". Первый и второй входы аналогового коммутатора 17 включены по схеме логического умножения (по схеме И), то есть аналоговый коммутатор пропустит на выход сигнал Uув, когда на обоих его входах будут логические "1", после чего это напряжение поступает на первый вход суммирующего усилителя 19, при этом второй его вход будет отключен (подключен к нулевому потенциалу), а на третий его вход с предварительного усилителя 22 поступает напряжение стабилизации U1. Происходит суммирование напряжений Uув и U1, разность которых поступает на усилитель мощности 20, в котором сигнал усиливается и поступает на стабилизирующий мотор 11, который в свою очередь создает момент M1ув, отрабатывающий платформу в горизонтальное положение. Однако этот момент будет восприниматься контуром стабилизации как возмущающий: под действием M1ув начнет прецессировать гироскоп 4, компенсируя своим гироскопическим моментом и возрастающим моментом стабилизации M1с момент ускоренного восстановления M1ув. Так как момент M1ув больше указанных моментов, то через некоторое время (обычно доли секунды) гироскоп 4 дойдет до электрического, а потом и до механического упора. При этом гироскопический момент станет равным нулю, момент стабилизации примет максимальное значение. Под действием разностного момента M1ув-M1с платформа 2 начнет ускоренно поворачиваться в сторону уменьшения угла α практически как не гироскопическое тело.
Аналогично будет работать контур ускоренного восстановления относительно оси подвеса платформы OZп.
В действительности оба контура работают совместно и представляют собой нелинейную систему с переменной структурой законов управления.
Работу устройства стабилизации, ускоренного восстановления и узла контроля можно описать следующими уравнениями, поясняющими изменение управляющих напряжений на стабилизирующих моторах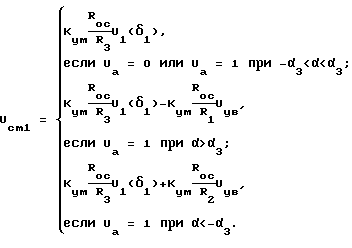
где выходные напряжения U1(δ1) и U2(δ2) предварительных усилителей 22 и 30 имеют вид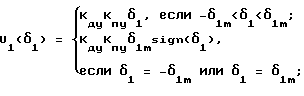

Узел логического контроля в режиме ускоренного восстановления функционирует следующим образом. Так как Uа равняется логической единице, то на выходах логических элементов НЕ 39 и 42 и соответственно вторых управляемых входах аналоговых коммутаторов 40 и 43 будут логические "0", а в силу того, что входы этих коммутаторов включены по схеме И они не сработают и на сигнальных выходах коммутаторов 39 и 43 будут присутствовать сигналы логического "0", что соответствует отсутствию признаков ОТКАЗ и ИСПРАВНОСТЬ. При завершении режима ускоренного приведения задатчик 32 выключают и узел логического контроля переводится в состояние готовности оценивать работоспособность контуров стабилизации.
Следовательно, элементы структурной новизны устройства стабилизации, ускоренного восстановления и контроля силовой гировертикали можно охарактеризовать следующим образом:
- в прототипе из конструкции удаляются маятники ускоренного восстановления, контактные датчики дополнительно размещаемые на осях подвеса гироблоков, сигнализирующие о касании гироблоками упоров, и редукторы в цепях стабилизации, являющиеся кинематическими звеньями между стабилизирующими моторами и соответствующими осями подвеса;
- в прототипе маятниковые чувствительные элементы, выполненные в виде электролитических уровней, заменены акселерометрами с характеристиками, эквивалентными характеристикам электролитических уровней, стабилизирующие моторы выполнены как двигатели постоянного тока с возбуждением от постоянных магнитов, а в узле логического контроля релейные логические элементы заменены на электронные логические элементы;
- между маятниковыми чувствительными элементами и усилителями мощности усилителей стабилизации, которые в прототипе состоят из последовательно соединенных предварительных усилителей (усилителей напряжения, фазочувствительных выпрямителей) и усилителей мощности, включен узел формирования управляющих напряжений контуров стабилизации и ускоренного восстановления, который в каждом канале состоит из суммирующего усилителя с тремя входами и параллельно включенных компараторов и управляемых коммутаторов, выходы которых подключены на первый и второй входы суммирующего усилителя, третий вход которого соединен с выходом предварительного усилителя контура стабилизации;
- задатчик ускоренного восстановления соединен с теми элементами устройства, чтобы обеспечить нормальное функционирование силовой гировертикали во всех режимах работы.
Таким образом в предлагаемом устройстве из прототипа удалены ненадежные механические и электромеханические контактные узлы, которые заменены или работа их сымитирована более надежными и точными электронным элементами, что позволило повысить надежность и точность работы силовой гировертикали в целом, как централизованного датчика углов крена и тангажа самолета.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| Одноосный силовой горизонтальный гиростабилизатор | 2020 |
|
RU2748143C1 |
| Гироскопический стабилизатор с контуром управления усилием в опорах гироблока | 2022 |
|
RU2789307C1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОПИЧЕСКИЙ ИНТЕГРАТОР | 2009 |
|
RU2398287C1 |
| Одноосный индикаторный горизонтальный гиростабилизатор | 2020 |
|
RU2750027C1 |
| Способ повышения устойчивости гиростабилизатора | 2022 |
|
RU2783728C1 |
| Установка для настройки одноосного силового горизонтального гиростабилизатора малогабаритного путеизмерительного устройства в лабораторных условиях | 2020 |
|
RU2743640C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |
| Устройство управления стабилизирующими моторами курсовертикали | 2022 |
|
RU2787311C1 |
| УСТРОЙСТВО КОРРЕКЦИИ ГИРОВЕРТИКАЛИ | 1998 |
|
RU2145057C1 |
Изобретение предназначено для быстрого приведения платформы силовой гировертикали в плоскость местного горизонта и для контроля исправной работы контуров силовой стабилизации. Устройство содержит узел формирования управляющих напряжений контуров стабилизации и ускоренного восстановления, содержащий два идентичных контура, каждый из которых состоит из параллельно включенных компараторов, выходы которых подключены на входы суммирующего усилителя, на вход которого подключен предварительный усилитель датчика углов гироскопа поперечной (продольной) коррекции. На входы компараторов подключены маятниковые чувствительные элементы. Выход суммирующего усилителя соединен через усилитель мощности со стабилизирующим мотором. Контроль работоспособности контуров стабилизации осуществляет узел логического контроля, состоящий из четырех компараторов, соединенных с четырехвходовым элементом ИЛИ, который подключен к аналоговому коммутатору ОТКАЗ непосредственно и к аналоговому коммутатору ИСПРАВНОСТЬ - через логический элемент НЕ, по сигналам предварительных усилителей, соединенных со входами соответствующих компараторов. Управляет работой задатчик, обеспечивающий два режима работы: ускоренного восстановления с блокировкой работы узла логического контроля и силовой стабилизации с автоматическим контролем работы контуров силовой стабилизации. Устройство повышает надежность и точность работы систем стабилизации, ускоренного восстановления и контроля. 1 з.п.ф-лы, 3 ил.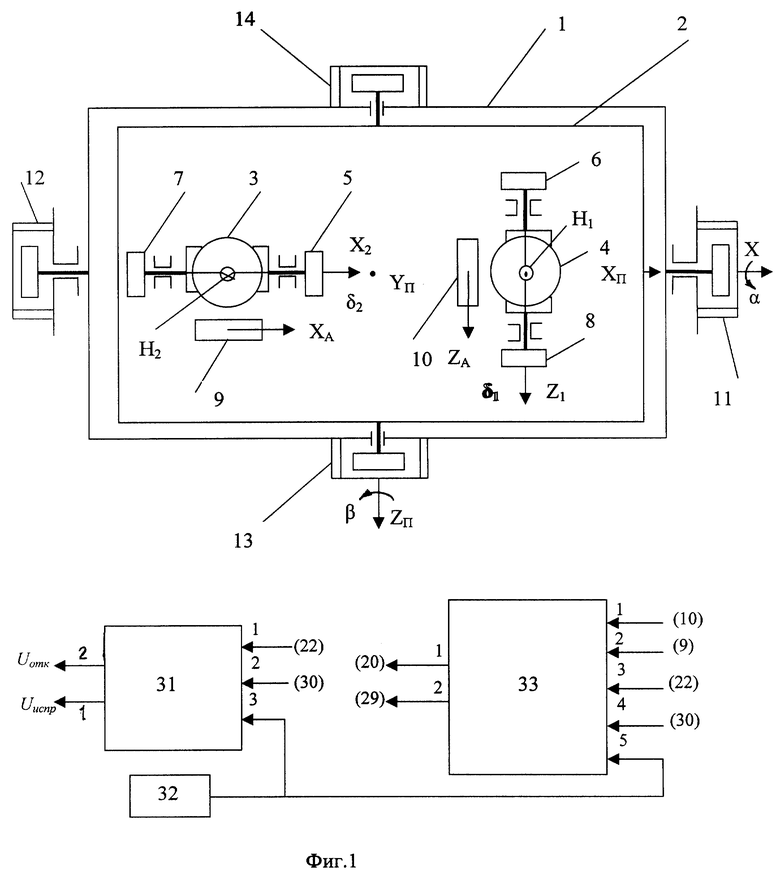
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Техническое описание | |||
| - М.: Машиностроение, 1976 | |||
| УСТРОЙСТВО КОРРЕКЦИИ ГИРОВЕРТИКАЛИ | 1998 |
|
RU2145057C1 |
| RU 94028536 A1, 27.04.1997 | |||
| Сканирующий предметный столик для систем автоматического контроля параметров полупроводниковых пластин | 1987 |
|
SU1536344A1 |
