Предлагаемое изобретение относится к области машиностроения в части разработки схем передаточных механизмов с бесступенчатым изменением кинематических характеристик.
Известны технические решения [1, 2], предлагающие бесступенчатое изменение положения вектора угловой скорости вращения ведомого вала в одноступенчатой зубчатой передаче, звенья которой имеют сферическую форму рабочей поверхности. Однако при сохранении несомненных преимуществ кинематической схемы, практическая реализация этих решений затруднена сложностями технологического процесса изготовления зубчатых сферических рабочих поверхностей основных звеньев передачи, что обуславливает, фактически, штучное производство таких передач. При этом выгоды от реализации принципа бесступенчатости существенно снижаются необходимостью снабжения механизма дополнительными вспомогательными элементами конструкции, изготовление каждого из которых создает дополнительные трудности технологического процесса.
Целью предлагаемого технического решения является создание передаточного механизма, содержащего минимальное количество звеньев передачи, при обеспечении возможности бесступенчатого разностороннего изменения кинематических характеристик движения, преобразуемого механизмом.
Согласно предлагаемому изобретению эта задача решается тем, что в механизме, преобразующем вращательное движение, взаимодействие звеньев ступени передачи, расположенной внутри опорного контура передачи, осуществляется в фрикционном контакте сферических рабочих поверхностей, при относительном качении без скольжения сопрягающихся звеньев; при этом бесступенчатое изменение величины и положения вектора угловой скорости преобразованного вращательного движения обеспечивается действием связей, управляющих положением ведомого звена и опорного контура, а усилие давления в контакте рабочих звеньев передачи, обеспечивающее качение без скольжения, создается упругой связью.
Предлагаемое техническое решение иллюстрируется фиг.1, где:
1 - ведущий вал, 2 - ведущее звено передачи, 3 - ведомое звено передачи, 4 - ведомый вал, 5 - опорная штанга, 6 - сферический подшипник, 7 - упругая связь, 8 - управляющая связь опорного контура, 9 - управляющая связь положения ведомого звена, 10 - стойка, ω1 - угловая скорость вращения ведущего звена, ω3var - угловая скорость вращения ведомого звена (варьируемая величина), 
Ведущий вал 1 составляет со стойкой вращательную кинематическую пару и жестко соединен с ведущим звеном 2, задавая ему угловую скорость вращения ω1. Ведомое звено передачи 3 составляет с ведущим 2 высшую кинематическую пару, взаимодействуя с ним в точечном контакте, приобретая в этом взаимодействии угловую скорость вращения ω3var, варьируемую в процессе работы в широком диапазоне значений. Ведомый вал 4 передачи жестко соединен с ведомым звеном 3, составляет сферическую кинематическую пару 6 с опорной штангой 5 и снабжен управляющей связью 9, действием которой задается значение угла φ4 между осями вращения ведущего 2 и ведомого 3 звеньев, обеспечивая этим варьируемость положения вектора угловой скорости 
Рабочая ступень фрикционной передачи, представленная звеньями 2 и 3, расположена внутри опорного контура передачи, содержащего стойку 10, две управляющие связи 8 и опорную штангу 5. Управляющие связи 8, выполненные, например, в виде тяг-тандеров (талрепов), обеспечивают прижатие ведомого звена 3 к ведущему 2 при посредстве упругой связи 7, расположенной на участке ведомого вала 4 между опорной штангой 5 и ведомым звеном 3 передачи; при этом усилие прижатия обеспечивает значение силы трения в контакте звеньев 2 и 3, не менее чем на 20% превышающей значение окружного усилия от ведущего звена 2, соблюдая, таким образом, условие качения без скольжения в сопряжении звеньев 2 и 3. Кроме того, положением управляющих связей 8 задается величина угла φ8 поворота плоскости опорного контура относительно оси, перпендикулярной оси вращения ведущего вала 1, сообщая, таким образом, дополнительную варьируемость положения вектора

Ожидаемый технический результат реализации предлагаемого решения заключается в обеспечении бесступенчатого варьирования, в широком диапазоне значений, величины угловой скорости вращения ведомого звена передачи, а также положений вектора этой угловой скорости внутри пространства, ограниченного коническими поверхностями, угол при вершине которых равен φ8 или 2φ4.
Источники информации
1. Авторское свидетельство СССР на изобретение №39499, приоритет №118417 от 11.11.1932 г.
2. Offenlegungsschrift Bundesrepublik Deutschland DE 4420183 A1. Aktenzeichen Ρ 4420183.4. Anmeldetag 09.06.1994.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО БЕССТУПЕНЧАТОГО ВАРИАТОРА С ПРИВОДОМ ВЕДУЩЕГО ЗВЕНА ЧЕРЕЗ РЫЧАГИ И ИЗМЕНЯЕМУЮ ТОЧКУ ПРИЛОЖЕНИЯ ВНЕШНИХ СИЛ ВРАЩЕНИЯ | 2013 |
|
RU2578797C2 |
| СПОСОБ ПЕРЕДАЧИ ДВИЖЕНИЯ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА (ЕГО ВАРИАНТЫ) | 1995 |
|
RU2084727C1 |
| ЗУБЧАТЫЙ ВАРИАТОР | 1997 |
|
RU2136989C1 |
| ШИРОКОДИАПАЗОННЫЙ БЕССТУПЕНЧАТЫЙ ПРИВОД (СУПЕРВАРИАТОР) | 2009 |
|
RU2428611C2 |
| МЕХАНИЗМ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ РАКЕТОЙ | 2005 |
|
RU2316720C2 |
| КОРОМЫСЛО-КУЛИСНЫЙ КОЛЕБАТЕЛЬНЫЙ МЕХАНИЗМ НЕФРИКЦИОННОГО ВЫСОКОМОМЕНТНОГО ВАРИАТОРА | 2021 |
|
RU2757327C1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР С УПРАВЛЯЕМЫМИ ПЕРЕХОДНЫМИ РЕЖИМАМИ | 2009 |
|
RU2400661C1 |
| ШИРОКОДИАПАЗОННЫЙ БЕССТУПЕНЧАТЫЙ ПРИВОД (СУПЕРВАРИАТОР) | 2009 |
|
RU2428607C2 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2007 |
|
RU2335678C1 |
| УГЛОВАЯ ЗУБЧАТАЯ МУФТА ДЛЯ ПОДВИЖНЫХ ВАЛОВ | 2009 |
|
RU2418211C1 |
Изобретение относится к машиностроению и может быть использовано в механизмах с бесступенчатым изменением крутящего момента. Фрикционный вариатор содержит опорный контур, ведущий и ведомый вал, штангу, опорную для ведомого звена передачи. Бесступенчатое изменение кинематических характеристик передачи обеспечено контролируемым контактом качения без скольжения сопрягающихся звеньев, имеющих сферическую форму рабочей поверхности. Передаточное число изменяется вращением опорного контура и/или изменением угла наклона ведомого вала по отношению к ведущему валу. Достигается бесступенчатое разностороннее изменение кинематических характеристик движения. 1 ил.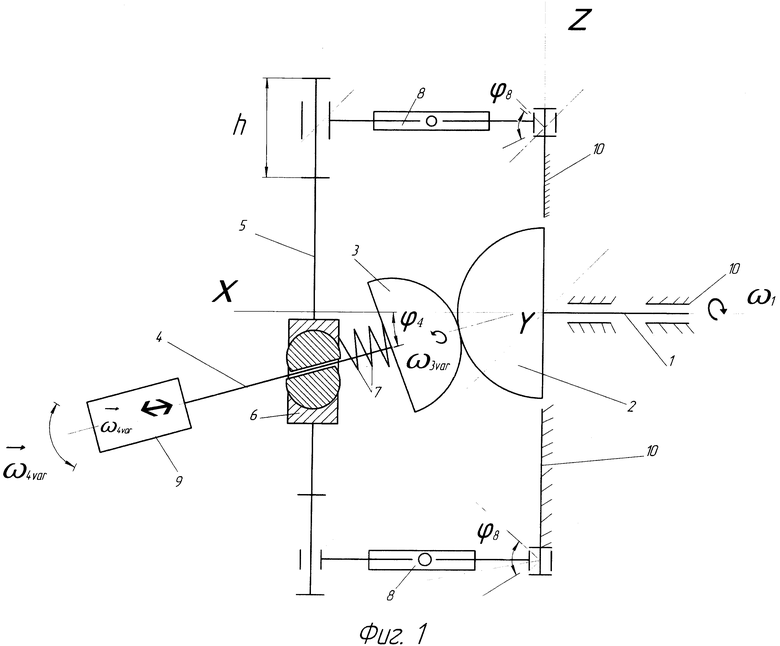
Фрикционный вариатор, преобразующий вращательное движение в фрикционном контакте сферических рабочих поверхностей ведущего и ведомого звеньев передачи, отличающийся тем, что ступень передачи размещена внутри опорного контура, состоящего из стойки, служащей опорой для ведущего звена, связей, управляющих положением контура и обеспечивающих замкнутость кинематической цепи передачи, и штангой, опорной для ведомого звена передачи, а ведомый вал снабжен упругой связью, размещенной на нем между ведомым звеном передачи и опорной штангой, с возможностью обеспечения надежного управляемого контакта качения без скольжения ведущего и ведомого звеньев; кроме того, ведомый вал снабжен связью, управляющей изменением передаточного числа передачи; при этом вращением опорного контура вокруг оси, перпендикулярной оси вращения ведущего звена, обеспеченным действием связей, управляющих положением контура, и изменением угла между осями ведущего и ведомого валов действием связи, управляющей изменением передаточного числа передачи, обеспечивается бесступенчатое изменение значений угловой скорости вращения ведомого звена и положений вектора этой угловой скорости в пространстве, ограниченном конусными поверхностями, угол при вершине которых задается поворотом плоскости опорного контура относительно стойки или величиной угла между осями ведущего и ведомого валов передачи.
| Парашют для шахтных клетей | 1930 |
|
SU20290A1 |
| ТЕЛЕСКОП С УЛУЧШЕННЫМИ ХАРАКТЕРИСТИКАМИ | 2018 |
|
RU2737820C1 |
| Устройство для намотки длинномерного материала | 1973 |
|
SU477092A1 |
| CN 102094946 А, 15.06.2011 | |||
| US 2010132495 А1, 03.06.2010 | |||
| JP 2007162925 A, 28.06.2007. | |||

