Устройство бесступенчатого вариатора с приводом ведущего звена через рычаги и изменяемую точку приложения внешних сил вращения
Область техники
Изобретение относится к устройствам для бесступенчатого регулирования передаточных отношений при передаче вращательного движения от одного тела к другому. Устройство, передающее вращение с одного вала-ведущего, на другой - ведомый называется передачей. Оно может быть использовано, например, в области транспортных средств, машиностроения, а также в приборостроении и др.
Уровень техники
Известен фрикционный вариатор в изобретении SU 1516687 А1 (Черняев Б.Н., 23.10.1989 г.), содержащий корпус, ведущий и ведомый соосные валы. На ведущем валу закреплено водило. На шлицевом ведомом валу перемещается центральное колесо с внутренней конусной поверхностью, которое может смещаться вдоль оси ведомого вала. Между ведущим и ведомом соосными валами размещена наклонная ось, которая в середине разделена на две части и опирается на сферические шарниры. На ведущем валу конец наклонной оси подпружинивается и прижимается к водилу.
На ведомом валу второй конец наклонной оси за счет ее подпруживания на ведущем валу передает вращающий момент в точке контакта конусной поверхности центрального колеса за счет сил трения.
Изменение передаточного отношения вариатора достигается за счет осевого смещения внутренней конусной поверхности центрального колеса, что приводит к изменению радиуса вращения ведомого вала. Этот вариатор выбран в качестве прототипа предложенного технического решения.
Первый недостаток этого устройства заключается в том, что оно обеспечивает один вид привода - фрикционный. Применение фрикционных передач ограничивается средними и малыми мощностями, так как при больших моментах соответственно возрастают усилия прижатия и передачи получают значительные габариты.
Второй недостаток этого устройства заключается в том, что крутящий момент передается с ведущего вала на ведомый через одну наклонную шарнирную ось, что уменьшает передаваемую мощность.
Еще один недостаток связан с тем, что внутри наклонной поверхности изменение радиуса привода ограничено и это снижает диапазон регулирования передаточного отношения.
В технике передача осуществляется в основном механическим способом через ряд соприкасающихся подвижных деталей. Как правило, скорости двигателя и рабочего органа не равны между собой. Согласование этих скоростей осуществляется при помощи передаточных механизмов с преобразованием скоростей и нагрузки.
Все механические передачи делятся на две группы: - передачи зацеплением (зубчатые - цилиндрические; конические; червячные; цепные и др.); а также передачи трением (фрикционные и ременные).
К разновидностям цилиндрических передач относятся: планетарные, волновые, реечные и винтовые.
Регулирование скорости может быть дискретным (ступенчатым) - в этом случае редуктор называют коробкой передач или коробкой скоростей, а также бесступенчатым (плавным) - такой механизм называют вариатором. В передаче скорости вращения ведомого и ведущего валов обычно различны, поэтому отношение этих скоростей называется передаточным отношением - i.
Частоты вращения выходного вала в коробках передач скоростей получают путем введения в зацепление различных пар зубчатых колес.
Простейший зубчатый механизм состоит из двух зубчатых колес, ведущее колесо называют шестерней, ведомое - просто колесом.
Бесступенчатая передача (вариатор) - механизм, позволяющий плавно изменять передаточное отношение скоростей вращения n1 и n2 на его ведомом и ведущих валах.
Механические бесступенчатые передачи основаны в большинстве на применении фрикционных передач или передач с гибкой связью: в них различные значения передаточных отношений i=n1/n2 достигаются за счет плавного изменения соотношения радиусов в контакте ведущего и ведомого звеньев, т.е. 
ω1 - угловая скорость ведущего звена;
ω2 - угловая скорость ведомого звена;
R1 - радиус ведущего звена;
R2 - радиус ведомого звена.
Передаточное отношение фрикционной передачи равно отношению диаметра ведомого колеса к диаметру ведущего колеса. Скорости точек в месте соприкосновения (контакта) диска за счет трения колес при отсутствии проскальзывания будут одинаковы.
Известно, что зубчатые механизмы - наиболее многочисленный вид механизмов передачи вращения благодаря постоянству передаточного отношения, контактности, долговечности и большой надежности, способности передавать большие мощности.
Поэтому перспективной можно считать только бесступенчатую зубчатую передачу или гибкую передачу.
Сущность изобретения
Технический результат изобретения заключается в повышении КПД передачи, расширении диапазона регулирования передаточных отношений и возможности использовать универсальный привод ведущего и ведомых валов в виде отдельных, самостоятельных передач: зубной, цепной, ременной или фрикционной с двумя ступенями передаточных отношений.
В соответствии с названием изобретения «Устройство бесступенчатого вариатора с приводом ведущего звена через рычаги и изменяемую точку приложения внешних сил вращения» принятое техническое решение основано на взаимодействии двух отдельных соосных звеньев.
Первое звено в составе ведущего щлицевого вала, шлицевой муфты с шарнирными стержнями и ползунами на конце изменяют точку приложения внешних сил вращения. Это происходит в связи с тем, что при смещении щлицевой муфты вдоль шлицевого вала шарнирные стержни изменяют радиус вращения ползунов, т.е. ползуны могут приближаться к оси вала или удаляться от него.
Второе звено в изобретении состоит из шестерни (вариант),диска (рычагов) с направляющими для ползунов первого звена, жестко закрепленных на валу и имеющих самостоятельную опору. Здесь диаметр шестерни (колеса) меньше диаметра диска (рычагов). Поэтому, схематически можно представить шестерню, как рычаг с постоянным плечом (радиусом вращения), а приводной диск, как другой рычаг, вдоль которого изменяется точка приложения внешних сил вращения. В этом случае получаем составной рычаг, у которого одно плечо постоянное равно радиусу шестерни (колеса), а другое с переменным радиусом вращения, т.е. ближе к оси или дальше от оси вала.
Переменный вращающий момент от ведущего звена вращения передается на ведомые тела вращения разного диаметра. Здесь вторая ступень образования передаточных отношений на параллельных валах ведущего и ведомых колес. На параллельных валах можно устанавливать различные виды передач: зубчатую, цепную, ременную или фрикционную.
В предложенном вариаторе, бесступенчатое регулирование передаточных отношений достигается двумя способами. Первый способ - за счет получения на вращающем звене в виде диска с направляющими для ползунов с шарнирными стержнями, шестернями (колеса) на валу, т.е. создание неравноплечего рычага с общей осью вращения, где одно плечо постоянное, равное радиусу ведущего тела вращения, а другое переменное - равное радиусу диска (рычага). В связи с тем, что привод ведущего звена организован через изменяемую (подвижную) точку приложения внешних сил вращения, поэтому получаем переменное передаточное отношение. Оно объясняется законом Архимеда, который определяет, что: "Отношение перемещений двух концов рычага, к которым приложены силы, всегда обратно отношению сил, приложенных к этим концам".
Например, при вращении двойного блока (фиг. 3 Схема ворота) концы веревок, навитых на скрепленные между собой (общая ось) блоки радиусов r1 и r2 переместятся на расстояния S1 и S2 пропорциональные этим радиусам: 

В предложенном вариаторе можно представить ведущее звено, в составе диска (рычагов), как аналог двойного блока. Здесь постоянное плечо - радиус ведущего звена, а переменное плечо - радиус диска (рычагов), т.е. точка приложения внешних сил вращения. Разница в том, что в двойном блоке оба радиуса постоянны, поэтому и их передаточное отношение постоянное.
В вариаторе отношение постоянного радиуса - ведущего тела вращения к переменному радиусу на диске образует переменное передаточное отношение на ведущем звене, т.е. переменное на конце ведущего тела вращения.
Второй способ - за счет передачи переменной окружной скорости ведущего тела вращения на ведомое тело вращения другого диаметра. Здесь взаимодействие равноплечих рычагов вращающихся тел, но разного диаметра также образуют передаточное отношение.
В предложенном вариаторе общее передаточное отношение двух ступеней будет равно их произведению.
В технике рычаг является элементом многих современных устройств: в ножницах, блоках, зубчатых колесах, в приводе переднего колеса велосипеда и многих других.
Пара колес внешнего зацепления, соприкасающихся в точке Р, вращаются в противоположных направлениях с угловыми скоростями ω1 и ω2, обратно пропорциональными радиусами r1 и r2 и числам зубьев Z1 и Z2: 
Техническая идея вариатора основана на использовании законов рычага, свойства которого математически обосновал Архимед.
Закон Архимеда (фиг. 2) о равновесии рычага показывает, что сила, действующая на левое (короткое) плечо рычага F2, в n раз больше силы F1, действующей на правое плечо (длинное).
Путь S2, пройденный точкой приложения силы F2, будет в n раз больше пути S1, пройденного точкой приложения силы F1. Здесь отношение перемещений двух концов рычага, к которым приложены силы, всегда обратно отношению сил, приложенных к этим концам. Отношение записывается: 
Здесь возникает передаточное отношение на рычаге.
Есть несколько определений передаточного отношения. Например, передаточное отношение скорости одного звена механизма к скорости другого звена, если специально не оговорено, то - скорости входного звена к скорости выходного звена. Обозначают как 


где: v - линейные (окружные скорости);
ω - угловые скорости звеньев с соответствующими этим звеньям индексами, в которых:
1 - входное звено, 2 - выходное звено.
Различают передаточное число зубчатой передачи, как отношение числа зубьев большого колеса Z2 к числу зубьев меньшего колеса (шестерни): 
Различают еще вариант передаточного отношения, как отношение силы (для поступательно движущихся звеньев) или вращательного момента на выходном звене механизма соответственно к силе или моменту на выходном звене механизма, взятое с обратном знаком: 
где: F1 и F2, T1 и Т2 - силы и моменты соответственно на входном (1) и выходном (2) звеньях; i - передаточное отношение - отношение скорости входного звена к скорости выходного звена; η - КПД механизма. На рычаге, как на теле вращения можно получать переменное передаточное отношение. Это связано с тем, что передаточное отношение зависит от точки приложения силы.
Рассмотрим случаи:
а) рычаг равноплечий
В этом случае оба конца рычага совершают равные пути и их отношение равно единице, поэтому и скорости линейные на концах равны.
б) рычаг неравноплечий
В этом случае длинный конец рычага совершает длинный путь, а короткий конец рычага меньший путь, поэтому отношение плеч не равно единице (больше или меньше единицы).
На практике неравноплечий рычаг используют, когда точка приложения внешней силы находится в постоянной точке между осью вращения и ободом вращающегося тела.
Например: в колесе паровоза и в колесе переднего привода велосипеда. В этом случае длинное плечо колеса паровоза и велосипеда ускоряют перемещение этих тел вдоль пути (дороги). Это вариант постоянного передаточного отношения рычага, т.к. отношение плеч постоянно.
Другой пример привода колес велосипеда: здесь приложение внешней силы находится в точке, которая удалена дальше, чем радиус вращающегося тела, но также плечо постоянно.
У велосипеда используют разные длины шатунов, которые влияют на передачу усилий от ног велосипедиста к колесу. Для расчета передаточного отношения необходимо взять отношение длины окружности колеса к длине окружности, описываемой шатуном и умножить на передаточное отношение цепного механизма. Таким образом, привод велосипеда описывается целиком, от педали до колеса велосипеда.
В этом механизме привода передаточное соотношение - это отношение количества оборотов колеса на один оборот педалей.
Есть понятие укладка или шаг велосипедиста - это расстояние, которое проезжает велосипед за один оборот педалей на данной передаче.
Чем меньше укладка, тем лучше тяга велосипеда на данной передаче, но меньше скорость.
Однако известен ряд устройств, в которых используется схема приложения внешних подвижных сил на неравноплечем рычаге, т.е. на длинной его части. Например, безмен - рычажные весы. Этот механизм - рычаг с неравными плечами. Одно плечо короткое (постоянное), а второе плечо длинное, вдоль которого может перемещаться эталонный груз с фиксацией положения.
Здесь на длинном плече рычага, руками можно изменять точку приложения внешней силы вращения. Этим способом уравновешиваются моменты сил на разных плечах.
Другой пример, вертикальный ворот - кабестан. Здесь спицы кабестана - длинные плечи и возникает возможность изменять точку приложения внешних сил вращения вдоль плеча рычага (вручную, без механизма).
Внешние силы (фиг. 1) - силы, действующие на точки материальной системы со стороны точек и тел, не принадлежащих данной системе.
Примеры внешних сил: сила ног на педали велосипеда, сила рук на ручку привода лебедки и др. В связи с этим, возникает цель - создать механизм передачи внешних сил вращения на ведущее звено в составе диска с направляющими для ползунов с шарнирными подвижными стержнями, обеспечивающими передачу вращающего момента через переменный радиус.
Для реализации этой идеи предлагается техническое решение и получение на ведущем колесе и совмещенного с ним диска (рычагов) переменного передаточного отношения (на первой ступени вариатора).
Сила - основная мера механического действия на тело. При вращении действие силы на тело определяет точка ее приложения. Сила, действующая на тело, закрепленное на оси, только тогда может вызвать вращение, когда направление силы не проходит через ось. Для поворота тела необходимо приложить усилие перпендикулярно к радиусу. При вращении действие силы на тело определяет точка ее приложения.
Линия действия силы - линия, вдоль которой действует сила.
Плечо силы d - расстояние от оси вращения до линии действия силы.
Момент силы относительно оси М - скалярная величина, характеризующая вращательное действие силы, равная произведению модуля силы F, действующей на твердое тело, на плечо силы d этой силы относительно данной оси
М=Fd
Парой сил называется система действующих на твердое тело двух равных по модулю, параллельных и направленных в противоположные стороны сил. Кратчайшее расстояние d между линиями действия сил пары называется плечом пары. Под воздействием пары сил свободное тело будет совершать вращательное движение. При применении простых механизмов (рычаг, блок, ворот и т.д.) выявлено, что перемещения вполне определенным образом связаны с силами, развиваемыми механизмом. Обнаружено, что отношение перемещений S двух концов простого механизма, к которым приложены силы, всегда обратно отношению сил F1, F2 приложенных к этим концам (фиг. 2).
Различают два вида рычагов. У рычага 1-го рода неподвижная точка опоры расположена между линиями действия приложенных сил, а у рычага 2-го рода она расположена по одну сторону от них.
При вращении круглого тела, схематически можно рассматривать вращение рычага с равными и неравными плечами.
Некоторым видоизменением двойного блока является ворот, а также кабестан (вертикальный ворот) (фиг. 3 Схема ворота).
Известно, что для получения значительной скорости перемещения на колесах паровоза использовался простой механизм в виде неравноплечего рычага. На ведущих колесах перемещаемая его часть (обод) была связана с длинным концом рычага, равным радиусу колеса. Шатун паровой машины паровоза давит с большой силой на короткое плечо кривошипа (с постоянным плечом). Шатун сообщает точкам обода колеса большую скорость, чем скорость в точке подшипника шатуна соединенным с поршнем.
Назовем другой пример использования неравноплечего рычага для ускорения перемещения - велосипед. Здесь пара внешних сил приложена к звездочке на оси колеса с постоянно коротким плечом рычага и уже скорость велосипеда V равна линейной скорости колеса с большим плечом рычага.
где - D - диаметр колеса,
n - частота вращения педалей,
Z1 - количество зубцов ведущей зубчатки.
Z2 - количество зубцов ведомой зубчатки.
«Золотое правило механики» соблюдается вполне точно при равномерном движении (без трения). Для того, чтобы получить выигрыш в силе, применяют разные комбинации блоков, например двойной блок (фиг. 3). Он состоит из двух блоков разных радиусов, жестко скрепленных между собой и насаженных на общую ось. Плечи сил (радиусы блоков R и r) в этом случае различны, т.е. двойной блок действует как неравноплечий рычаг. Условия равновесия двойного блока такие же как и неравноплечего рычага FR=Pr или 
Двойной блок можно также рассматривать как преобразователь силы. И здесь, прикладывая малую силу на блок большего радиуса, мы можем получить большую силу, действующую на блок малого радиуса. При вращении твердого тела (рычага) вектор V скорости направлен по касательной к описываемой точке окружности по направлению движения, что совпадает с направлением дуговой стрелки угловой скорости. Векторы скоростей всех точек сечения, перпендикулярного оси вращения, будут располагаться в его плоскости, образуя поле скоростей (фиг. 4).
Отметим что:
Векторы скоростей точек перпендикулярны прямым, соединяющим точки с осью вращения, и направлены в сторону вращения тела (ω).
Модули скоростей точек вращающегося тела пропорциональны их расстоянию и от оси вращения.
Скорость V точки вращающегося тела иногда называют линейной или окружной скоростью точки в отличие от угловой скорости тела.
V=ω·R
где ω - угловая скорость;
R - радиус вращения.
На (фиг. 4) изображено поле скоростей, на котором видно, что если рычаг, у которого плечи равны, то будут равны и скорости на его концах (Va=Vв). Если плечи вращения не равны АО>ОС, то и окружные скорости этих плеч будут не равны Va>Vc на конце рычага с длинным плечом окружная скорость больше, а на коротком плече меньше, т.к. скорость зависит от радиуса их вращения (при общей угловой скорости).
Итак, неравноплечий рычаг позволяет на коротком плече получить выигрыш в силе или иметь большие скорости на длинном конце рычага. Учитывая эти свойства рычага, рассмотрим схему устройства, в котором две шестерни расположены на параллельных осях и находится в зацеплении (фиг. 5). Кинематическая схема привода ведомого звена вариатора (вариант зубчатой цилиндрической или фрикционной передачи). Примем одну шестерню 1 за ведущую, а другую 2 за ведомую. К торцу ведущей шестерни 1 (поперек оси) жестко закрепим рычаг 3, выступающий за диаметр этой шестерни. На рычаге 3 поместим ползун 4, который имеет возможность перемещаться вдоль рычага 3 и крепиться на нем.
В этой схеме привода ведомого звена 2 мы получили неравноплечий рычаг на ведущем звене 1, взаимодействующий с ведомой шестерней 2 радиуса r2. При этом учитываем, что две равные силы F1 и F2 действуют по разные стороны от оси вращения и направлены противоположно друг другу. Эти две силы создают вращающий момент пары сил F1 и F2 с плечом равным сумме двух этих радиусов вращения. Рассмотрим действие каждой силы в отдельности. Плечо R2 внешней силы F1 на рычаге 3 может изменяться, а другое плечо на этом же рычаге в точке В для силы F1 будет постоянным и равным радиусу ведущего звена R1 (равно радиусу шестерни или колесу). Для внешней силы F2 расположенной по другую сторону оси на рычаге 3 плечо будет равно плечу R2 силы F1. Это плечо R2 силы F2 может также изменяться, но другое плечо на этом же рычаге в точке С для силы F2 будет постоянным и равным радиусу ведущего звена R1.
Известно, что в точке контакта шестерен или колес окружные скорости вращения тел одинаковые. Однако их передаточное отношение зависит от диаметров взаимодействующих шестерен (колес).
В предлагаемом вариаторе привод ведущего звена (шестерен, колес) осуществляется через неравноплечий рычаг, когда одно плечо рычага равно радиусу ведущего звена, а другое плечо рычага изменяется, т.е. оно может быть больше или меньше радиуса ведущего звена. В результате такого привода получаем переменную скорость на венце ведущего звена с постоянным плечом вращения. Это происходит за счет изменения радиуса привода вращения, когда точки приложения внешних сил вращения расположены на другом конце рычага ведущего звена. Полученная переменная скорость на венце ведущего звена передается ведомому звену за счет зацепления или трения и изменяет его угловую скорость. В этом случае передаточное отношение будет зависеть от переменной скорости на конце рычага с постоянным плечом ведущего звена и отношения диаметров (радиусов) взаимодействующих шестерен (колес) ведущего и ведомого звеньев.
Описание чертежей.
На фиг. 1-6 указано:
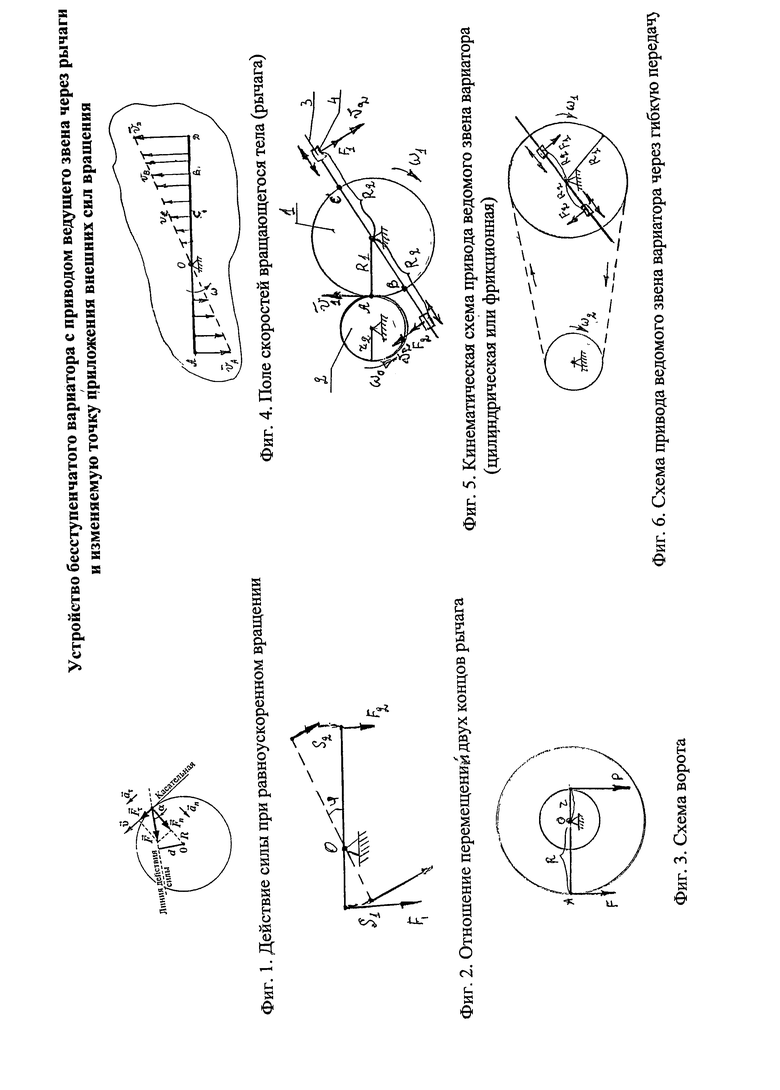
Фиг. 1. Действие силы при равноускоренном вращении
Фиг. 2. Отношение перемещения двух концов рычага
Фиг. 3. Схема ворота
Фиг. 4. Поле скоростей вращающегося тела (рычага)
Фиг. 5. Кинематическая схема привода ведомого звена вариатора (цилиндрическая или фрикционная)
Фиг. 6. Схема привода ведомого звена вариатора через гибкую передачу
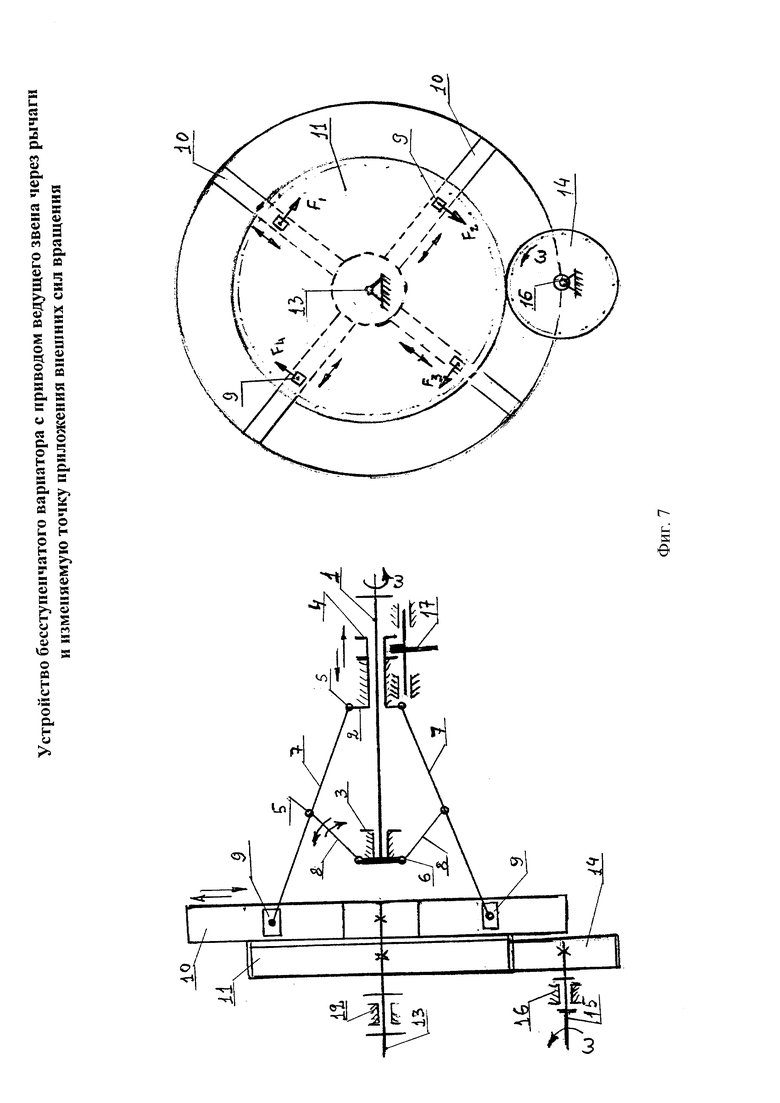
Фиг. 7. Устройство бесступенчатого вариатора с приводом ведущего звена через рычаги и изменяемую точку приложения внешних сил вращения
При вычислении кинематических характеристик различных точек вращающегося тела в формулы V=ω.R и ∈=at/R; окружной скорости и углового ускорения для данного момента времени, будут подставляться одни и те же значения величин угловой скорости ω и углового ускорения ∈, так как они являются характеристиками движения всего тела. Где R - радиус вращения, at - тангенциальное ускорение. Обе эти величины зависят от радиуса вращения. Угловой путь или угол поворота ϕ вращающегося тела также зависит от радиуса, чем больше радиус, тем больше величина тангенциального ускорения at=∈R=2nr, где n - число оборотов.
Если ускорение направлено в ту же строну, что и скорость, то движение называется равноускоренным, а если направлено в противоположную сторону скорости, то - равнозамедленным.
Определить скорость V1 в точке контакта А (фиг. 5) взаимодействующих шестерен (колес) можно по формуле скорости V=ωR где ω - угловая скорость, R - радиус вращения. Здесь надо учесть, что при вращении тела сохраняется общее условие равенства ω1=ω2=ω угловых скоростей приводного рычага, т.е. до оси вращения и после оси вращения, а также равенство ∈1=∈2=∈ угловых ускорений. Это общее условие сохраняется как при равномерном, так и при равнопеременном вращении.
Так как угловая скорость равна ω=V/R, то при равенстве ω1=ω2=ω, отношения равны V1/R1=V2/R2 и V1=V2R1/R2
и соответственно скорость V2 равна V2=V1R2/R1
где V1 - скорость в точке контакта ведущего звена с ведомым;
V2 - скорость в точке приложения внешних сил, на другом конце рычага;
R1 - радиус ведущего звена (постоянное плечо рычага);
R2 - радиус вращения в точке приложения внешних сил на другом конце рычага (переменная величина).
Если отношение радиусов R1/R2 равно единице, то скорости равны V1=V2.
Если отношение радиусов R1/R2 больше единицы, то скорость V1 будет больше скорости V2.
Если отношение радиусов R1/R2 будет меньше единицы, то скорость V1 будет меньше скорости V2.
Определив скорость V1 в точке контакта взаимодействующих шестерен (колес) можно найти число оборотов n2 ведомого звена n2=V1/2πR2
Где - 2πR2 - длина окружности ведомого звена, зависящая от диаметра.
Зная число оборотов ведущего звена n1 и ведомого звена n2 можно определить передаточное отношение i·i=n1/n2
Можно сделать общий вывод, что получать переменную окружную скорость в точке контакта ведущего и ведомого звеньев реально. Это возможно за счет схемы привода ведущего звена через рычаги. При этом одна часть рычага равна радиусу ведущего звена, а вторая часть рычага находится под действием внешних сил, точка приложения которых вдоль плеча изменяется. В связи с этим, при радиусе приложенных сил меньшим радиуса ведущего звена, окружная скорость в точке контакта ведущего и ведомого звеньев будет возрастать. При радиусе приложенных внешних сил большим радиуса ведущего звена, окружная скорость в точке контакта ведущего и ведомого звеньев будет уменьшаться.
В результате предлагаемого привода постоянное плечо ведущего звена будет совершать вращательное движение с различной (окружной) скоростью. Эта переменная окружная скорость передается на ведомое звено. Отношение угловых скоростей ведущего и ведомого звеньев дает переменное передаточное отношение.
Отметим, что схема привода ведущего звена через рычаги и изменяемую точку приложения внешних сил вращения сохраняет принцип работы вариатора. В этом случае возможно использование цилиндрической или конической зубчатых передач, а также гибкой (цепная, ременная) (фиг. 6) или фрикционной передач.
Осуществление изобретения
В устройство вариатора (фиг. 7) введен привод ведущего звена в составе диска с направляющими для ползуна (рычагов) 10 и тела вращения 11 от двух отдельных ведущих соосных валов 1 и 13.
Ведущее звено 10, 11 жестко закреплено на втором ведущем валу 13. Диск с направляющими для ползунов (рычаги) 10 имеет диаметр, который больше диаметра ведущего звена 11 и они расположены параллельно друг другу. Вращающий момент от ведущего шлицевого вала 1 с муфтой 4 и подвижными стержнями 7 и 8, и ползунками 9 на конце передается на диск 10. Ползуны 9 перемещаются в вертикальной плоскости за счет длинных подвижных стержней 7 и коротких 8. Длинные стержни 7 вдвое больше коротких 8. Короткие стержни 8 шарнирно связаны с опорой 3 первого ведущего вала 1.
Положение ползунов 9 можно фиксировать управляемым ползуном 17, расположенным на подвижной шлицевой муфте 4 и находящейся на ведущем шлицевом валу 1. Управляемый ползун 17 позволяет изменять радиус вращения ведущего звена 10, 11, которое находится на втором ведущем валу 13. Смещение ползунов 9 в диске (рычаге) 10 изменяет вращающий момент, окружную скорость и создает переменные передаточные отношения на ведущем теле вращения 11, в соответствии с законом Архимеда о рычаге. Переменный вращающий момент от ведущего тела вращения 11 передается на несколько ведомых тел вращения 14 разного диаметра, но меньших, чем диаметр ведущего тела 11. Ведомые тела 14 вращаются на валах 15, в опорах 16 корпуса и расположены параллельно вокруг второго ведущего вала 13.
В вариаторе предложен универсальный привод, который позволяет на место ведущего тела вращения 11 и ведомого 14 устанавливать различные виды передач: зубчатую, цепную, ременную или фрикционную. Эти варианты зацепления не изменяют принцип работы вариатора. Это описание второй ступени образования переменных передаточных отношений на звене: ведущее и ведомое тела вращения.
Устройство вариатора в составе двух ступеней передач обеспечивает общий диапазон переменных управляемых передаточных отношений и равных их произведено.
Устройство работает следующим образом
При перемещении муфты 4 вдоль первого ведущего шлицевого вала 1 в сторону ведущего звена 10, 11, стержни 7 и 8 за счет шарниров 5 и 6 перемещают ползуны 9 в пазах диска 10. Вращающий момент передается через ползуны 9, диск 10 на второй ведущий вал 13 и ведущее тело вращения 11 (фиг. 7).
В связи с тем, что положение ползунов 9 может управляться, т.е. может фиксироваться радиус вращения привода ведущего звена 10, 11, то будет изменяться и момент внешних сил вращения, зависимый от радиуса привода.
Предположим, что плечо момента внешних сил вращения (ползунов 9) равно радиусу ведущего тела вращения 11. В этом случае окружная скорость венца ведущего тела вращения 11 будет равна окружной скорости ползунов 9.
Здесь диаметры равны при равной угловой скорости. Передаточное отношение здесь определяется только отношением диаметра занимаемого ползунами и телом вращения 11, т.е. оно будет в этом случае равно единице.
В случае положения ползунов 9, когда диаметр больше диаметра ведущего тела 11, работает условие неравноплечего рычага. Здесь плечо привода ведущего звена-диска с направляющими 10 будет больше плеча (радиуса) самого ведущего колеса 11, т.е. при общей угловой скорости, но разных радиусах, окружная скорость ползуна 9 будет больше окружной скорости венца ведущего колеса 11. В этом случае ведущее колесо 11 передает ведомому колесу 14 меньшую окружность скорость, и частота вращения ведомого колеса 14 уменьшается. Однако, передаточное отношение ведущего 11 и ведомого колес 14 учитывается, как дополнительное. Общее передаточное отношение будет равно произведению их ступеней.
Рассмотрим третий вариант положения ползунов 9, когда за счет перемещения управляющего ползуна 17 ползуны 9 займут положение в середине радиуса ведущего колеса 11. Здесь плечо привода ведущего звена-диска с направляющими 10 будет меньше плеча (радиуса) самого ведущего колеса 11, т.е. при общей угловой скорости на большем радиусе ведущего колеса 11 окружная скорость будет больше окружной скорости ползунов 9. В этом случае ведущее колесо 11 передает ведомому колесу 14 большую окружную скорость, и частота вращения ведомого колеса 14 увеличивается, но общее передаточное отношение ведущего и ведомого колес учитывается как произведение двух ступеней.
Источники информации:
1. Изобретение SU 1516687 (Черняев Б.Н.), 23.10.1989.
2. И.И. Артоболевский. «Механизмы в современной технике», том 3, М: Наука, 1973, стр. 457, мех. 573.
3. Г.С. Ландсберг. Элементарный учебник физики. Том 1. Механика. Физматлит 2000 г.
4. А.Ф. Крайнев. Словарь-справочник по механизмам. Москва «Машиностроение» 1981 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЫЧАЖНЫЙ ВАРИАТОР | 2011 |
|
RU2467227C1 |
| ИНЕРЦИОННЫЙ АВТОМАТИЧЕСКИЙ ИМПУЛЬСИВНЫЙ ВАРИАТОР | 2002 |
|
RU2212575C1 |
| Зубчато-рычажный вариатор | 1979 |
|
SU868200A1 |
| ВЫСОКОМОМЕНТНЫЙ ВАРИАТОР | 2001 |
|
RU2204749C1 |
| ФРИКЦИОННЫЙ РЕВЕРСИВНЫЙ ВАРИАТОР | 1995 |
|
RU2112900C1 |
| ТРАНСМИССИЯ ВЕЛОМАШИНЫ | 2000 |
|
RU2199465C2 |
| Педальный привод (варианты) | 2016 |
|
RU2651314C1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 2016 |
|
RU2620278C2 |
| Импульсный вариатор | 1983 |
|
SU1132087A1 |
| МУСКУЛЬНЫЙ ПРИВОД ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2247676C2 |
Изобретение относится к области машиностроения, а более конкретно к бесступенчатым вариаторам. Вариатор состоит из ведущего и ведомого звеньев. Ведущее звено может состоять из зубчатой шестерни, звездочки или колеса с приводными рычагами, жестко укрепленными попрек их оси вращения. Приводные рычаги перемещают ползуны, которые передают вращающий момент через переменный радиус. При смещении управляемого ползуна перемещаются приводные ползуны. Предлагаемая схема привода вариатора позволяет использовать цилиндрическую или коническую зубчатую передачу, а также гибкую - цепную, ременную или фрикционную. Достигается упрощение конструкции. 7 з.п. ф-лы, 7 ил.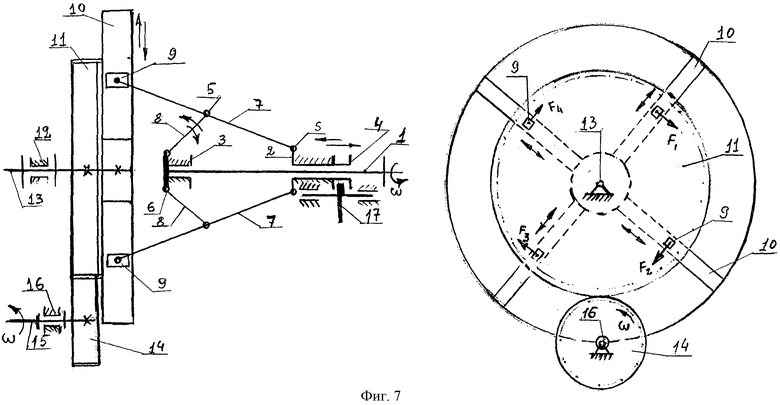
1. Устройство бесступенчатого вариатора с приводом ведущего звена через рычаги и изменяемую точку приложения внешних сил вращения, содержащее ведущий и шлицевой соосные валы, а также механизм регулирования передаточного отношения, отличающееся тем, что на шлицевом валу привода с опорами перемещается шлицевая муфта с шарнирами и стержнями, шарнирно соединенными между собой и с муфтой, а также с опорой вала привода, при этом на концах стержней размещены ползуны на шарнирах, которые перемещаются в направляющих диска или вдоль рычагов по нескольким взаимно перпендикулярным направлениям за счет поворота стержней при перемещении управляемого ползунка на шлицевом валу, что изменяет точку приложения внешних сил вращения, а диск или рычаги жестко связан с ведущим звеном вариатора и расположен соосно с валом привода на опоре, где диаметр диска или рычагов превышает диаметр ведущего звена и передает переменный вращающий момент на ведомые валы, размещенные параллельно оси ведущего звена, кроме этого, в вариаторе применены две ступени передаточных отношений, одна за счет изменения радиуса привода на ведущем звене на основе свойства рычага, а вторая ступень обеспечивается разностью диаметров взаимодействующих шестерен или колес передачи.
2. Вариатор по п. 1, отличающийся тем, что ведомые и ведущие звенья могут быть исполнены в виде зубчатых колес или звездочек, т.е. в виде самостоятельных передач.
3. Вариатор по п. 1, отличающийся тем, что создает переменные передаточные отношения за счет отдельного применения зубчатой, конической, а также гибкой или фрикционной передачи в месте взаимодействия ведущего и ведомого звеньев.
4. Вариатор по п. 1, отличающийся тем, что в нем возможна установка одного или нескольких ведомых валов, расположенных параллельно оси ведущего вала.
5. Вариатор по п. 1, отличающийся тем, что на ведомых валах устанавливаются колеса зацепления или звездочки разного диаметра.
6. Вариатор по п. 1, отличающийся тем, что две ступени передаточных отношений образуются вначале на венце ведущего колеса за счет его привода через рычаги и изменяемую точку приложения внешних сил вращения, а также за счет разности диаметров ведущих и ведомых взаимодействующих колес.
7. Вариатор по п. 1, отличающийся тем, что регулирование передаточного отношения на шлицевом валу привода осуществляется путем смещения шлицевой муфты со стержнями и ползунами на их конце вдоль оси вала привода.
8. Вариатор по п. 1, отличающийся тем, что передаточное отношение регулируется управляемым ползуном, размещенным на шлицевом валу привода.
| Фрикционный вариатор | 1987 |
|
SU1516687A1 |
| И.И | |||
| Артоболевский "Механизмы в современной технике", том 3, М.: Наука, 1973, стр | |||
| Прибор для вычерчивания конических сечений | 1922 |
|
SU457A1 |
| Котел для водяного отопления с внутренним перегревателем воды для побуждения циркуляции в сети и с регулятором наружной температуры котла | 1924 |
|
SU573A1 |
| И.И | |||
| Артоболевский "Механизмы в современной технике", том 2, 2-е изд., переработанное, М.: Наука, 1979, стр | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Наборный фрезер для дерева | 1922 |
|
SU892A1 |
| Прибор для измерения кривизны буровых скважин | 1931 |
|
SU29433A1 |

