Изобретение относится к оборонной технике, в частности к ракетостроению, и может быть использовано при разработке комбинированного управления и эффективности привода рулей для высокоманевренных ракет и ракет, работающих в высоких слоях атмосферы.
Известен управляемый реактивный снаряд 9М117, состоящий из блока рулевого привода с рулями, реактивного двигателя, аппаратурного отсека, блока аэродинамических стабилизаторов [1].
Недостатком известного снаряда является конструкция аэродинамических рулей большого удлинения и зависимости управляющей силы и момента рулей от углов атаки по тангажу и рысканью, а большие шарнирные моменты на рулях требуют повышения мощности блока рулевого привода для управления по углу вектором движения снаряда, что ведет к увеличению массы снаряда, не являющейся полезной нагрузкой.
Наиболее близкой по сути является ракета с комбинированным управлением, содержащая корпус, двигатель, аппаратуру наведения и управления, четыре интерцептора, установленные на срезе сопла реактивного двигателя в плоскостях соответствующих аэродинамических рулей по каналам управления, а диаметрально расположенные интерцепторы попарно жестко соединены траверсой в два рычага, каждый из которых связан с автономным приводом, причем аэродинамические рули управляются от отдельных приводов [2].
Недостатком известного комбинированного управления является управление по единой команде аэродинамическими и газодинамическими рулями с разными автономными приводами, которые, как известно, не могут синхронно отработать поступившую единую команду управления, что снижает эффективность управления вектором движения ракеты.
Задачей, на решение которой направлено изобретение, является создание механизма комбинированного управления ракетой, более эффективно использующий управление в сочетании аэродинамических и газодинамических рулей по единой команде управления по тангажу и рысканью и синфазного управления аэродинамическими и газодинамическими рулями от одного привода по одному из каналов управления.
Поставленная задача согласно изобретению достигается тем, что угловое положение аэродинамических и газодинамических рулей, колебательное их перемещение и передача вращения от активного элемента, например мотор-редуктора механической системы, осуществлено одновременно и синфазно в плоскости канала управления по тангажу и рысканию по единой команде от бортового блока управления. Выходной вал активного элемента кинематически связан с преобразователем вращательного движения в колебательное, причем первичное звено активного элемента снабжено устройством упругой демпфирующей виброизоляции передачи движения.
При изучении аналогов и прототипов к данной заявке на изобретение установлено, что усовершенствование эффективности управления снарядом 9М117 по патенту RU 2096735 С1 и разработанное комбинированное управление вектором движения ракеты по каналам тангажа и рысканья осуществляется синхронно аэродинамическими и газодинамическими рулями, что обеспечило снижение шарнирного момента рулей до 0,5 кгм [2-прототип] и с учетом использования одного привода на диаметрально расположенную пару газодинамических рулей, расположенных в плоскости аэродинамических рулей по одноименному каналу управления, аэродинамические рули приводятся от отдельных приводов, управляемых по единой команде управления. Такое комбинированное управление не может синфазно выполнить команду на движение аэродинамических и газодинамических рулей от разных приводов, которые имеют различные динамические характеристики.
Предложенный механизм комбинированного управления ракетой согласно изобретению позволяет от одного привода по единой команде от блока управления и наведения перемещать синфазно аэродинамические и газодинамические рули одновременно по каналу управления. При этом рули могут осуществлять колебательное движение с изменением амплитуды и частоты около заданного положения или могут отклоняться без колебаний от «нулевого» положения на заданный командой угол.
Предложенный механизм управления может использоваться как для ракет, перемещающихся в атмосфере и ее верхних слоях, так и для управления движением торпед в воде на допустимых глубинах.
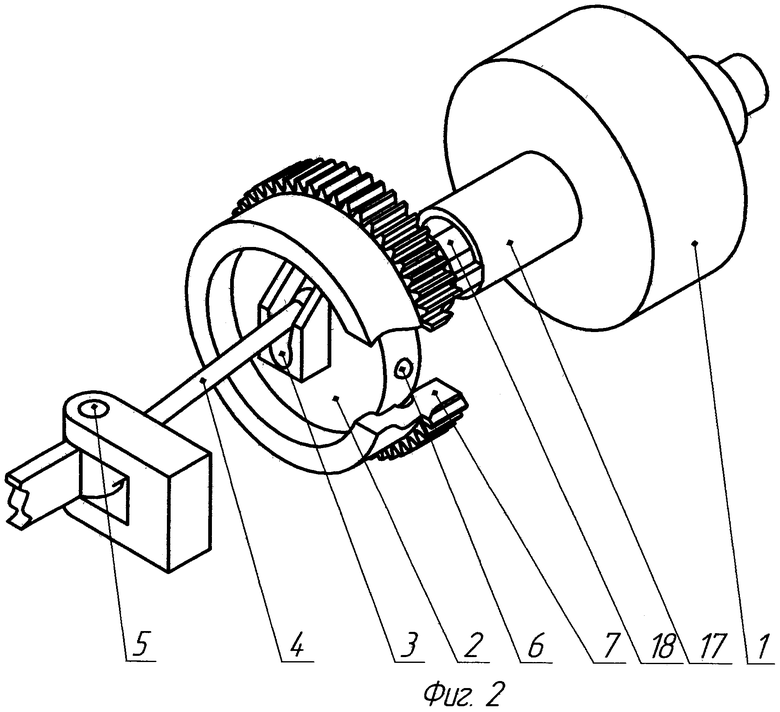
На Фиг.1 схематично изображено устройство одновременного управления от одного привода аэродинамическими и газодинамическими рулями по каналу управления.
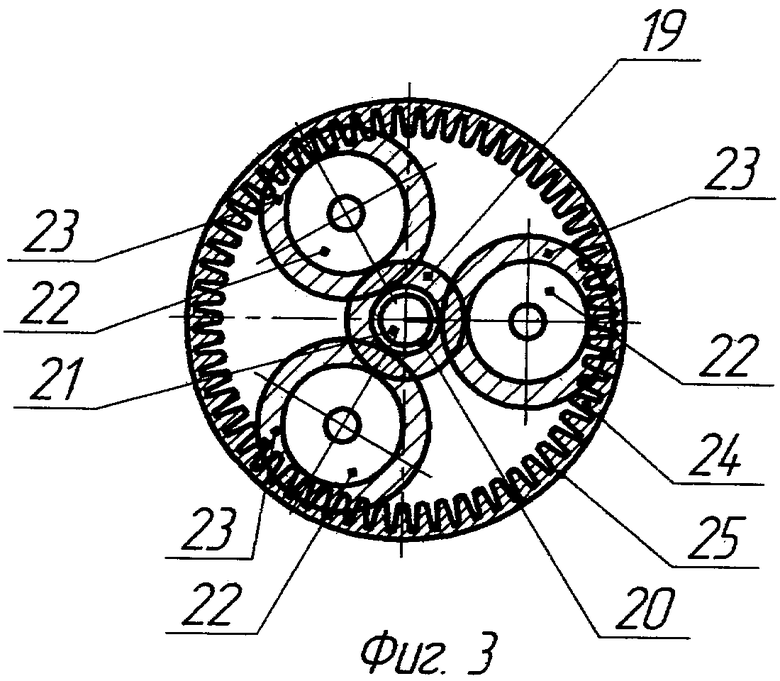
На Фиг.2 схематично в аксонометрии изображен привод рулей.
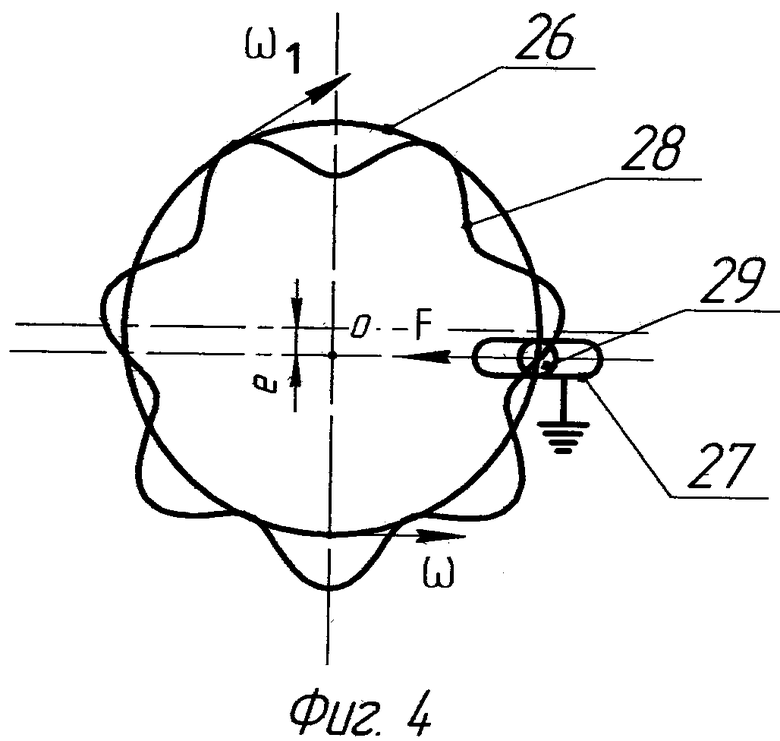
На Фиг.3 схематично изображено первичное ведущее звено с демпфирующими упругими стержнями.
На Фиг.4 схематично изображен вид в плане на кинематическое взаимодействие свободного тела качения (передаточного элемента) с ведущим звеном, опорным звеном-сепаратором и ведомым звеном.
Привод рулей (Фиг.1 - 2) крепится на корпусе ракеты. Привод содержит мотор-редуктор 1 со свободными телами качения с передаточным отношением 40...60 единиц, на муфте 17 и шлицевом выходном валу 18 которого подвижно вдоль оси размещено водило 2, на торцевой поверхности которого выполнен наклонный цилиндрический открытый паз 3 с наклоном к оси вращения водила 2 на угол 5...30°. В пазу 3 размещен шаровидный конец рычага 4, второй конец которого на оси подвижно размещен в серьге коромысла 5 с двумя плечами на оси. На внешнем периметре водила 2 в гнезде подвижно помещен шарик 6, взаимодействующий с замкнутой косой направляющей на внутренней поверхности обечайки 7, охватывающей внешний периметр водила 2 и подвижной вокруг оси водила 2 и неподвижной относительно водила 2 вдоль его оси с возможностью перемещения вместе с водилом 2 вдоль оси вала 18. На внешнем периметре обечайки 7 закреплено зубчатое колесо 8 в зацеплении с трибом 9, приводимым во вращение от сервопривода 10 по команде блока управления 11 ракетой. Одно из плеч коромысла 5 штангой соединено с траверсой 12 с диаметрально жестко закрепленными на ней интерцепторами 13, которые в исходном положении не введены в поток газов из сопла реактивного двигателя (не показан). Второе плечо коромысла 5 тягой 14 связано подвижно с плечом рычага 15, управляющего поворотом аэродинамического руля 16 относительно оси ракеты в плоскости канала управления по тангажу или рысканию.
В качестве первичного звена мотор-редуктора (Фиг.3) выбрано устройство передачи вращения с демпферной виброизоляцией, состоящее из пакетов радиально расположенных упругих стержней 19 диаметром, например, 0,3 мм и с выступающей частью, например, 3 мм, фиксированных по ободу колеса 20 и составляющих ведущее колесо, установленное на валу 21 двигателя, колес 22 сателлитов, упругие стержни 23, стержни 19 ведущего колеса 20 и стержни 23 сателлитов 22 входят в свободное пространство между стержнями, образовавшееся за счет радиального расхождения, и заполняют его, входя в контакт с ответными упругими стержнями 19. Упругие стержни 23 сателлитов 22 входят с незначительной изгибной упругой деформацией между заостренными зубьями 24 ведомого колеса 25, связанного с валом первичного звена мотор-редуктора. При вращении ведущего вала 21 двигателя и вращении ведущего колеса 20 упругие стержни 19, вошедшие в механический контакт с упругими стержнями 23 сателлитов 22, претерпевают упругую изгибную деформацию и при дальнейшем круговом движении взаимно прокатываются по линии механического контакта с одновременной передачей вращения от ведущего колеса 20 к сателлитам 22, которые передают вращение ведомому колесу 25 при взаимодействии упругих стержней с его жесткими зубьями 24.
Ведущее звено 26 со свободными телами качения (Фиг.4) изображено в виде круга с замкнутой направляющей с эксцентриситетом «е» от общей оси «О». Опорное звено - сепаратор 27 - изображено в виде диска, закрепленного на корпусе и снабженного радиальными направляющими. Ведомое звено 28 содержит замкнутую направляющую с симметричными изгибами относительно оси «О» в виде нескольких периодов. Ведущее звено 26, сепаратор 27 и ведомое звено 28 составляют ступень передачи, а передаточное отношение зависит от числа периодов изгиба замкнутой направляющей на ведомом звене 28. Величина эксцентриситета «е» определяет амплитуду перемещения передаточного элемента 29, например шарика, в радиальной направляющей сепаратора 27 и его амплитуда составляет 2·е [3].
Если ведущее звено 26 вращать в любую сторону, например, по стрелке ω, то направляющая с эксцентриситетом будет перемещать шарик 29 в направляющей сепаратора 27 по радиусу, который, в свою очередь, воздействует на одну из ветвей периодического изгиба направляющей на ведомом звене 28, начнет перемещать ведомое звено 28 по стрелке ω1 вокруг оси «О». Если попытаться вращать ведомое звено в любую сторону, то это не удастся из-за того, что шарик 29 воздействует почти перпендикулярно (в упор) стенке направляющей на сепараторе 27, и воздействие на ведущее звено 26 отсутствует, т.е. в этой конструкции осуществлен принцип самоторможения и не позволяет вращать ведущий вал 26 от ведомого 28, что крайне важно при воздействии внешних сил на рули и привод рулей в целом, особенно при больших углах атаки, позволяющих резкое маневрирование ракеты.
Работа механизма комбинированного управления ракетой осуществляется следующим образом.
Перед стартом или во время старта включают мотор-редуктор 1, который приводит во вращательное движение водило 2 (Фиг.1 - 2).
В наклонном открытом цилиндрическом пазу 3 водила 2 подвижно размещен шаровидный конец рычага 4, а второй конец рычага 4 на оси воздействует на серьгу коромысла 5 с двумя плечами на оси.
Одно плечо подвижно соединено штангой с траверсой 12 с газодинамическими рулями 13 на срезе сопла реактивного двигателя (не показан).
Другое плечо коромысла 5 тягой 14 управляет через рычаги 15 поворотом аэродинамических рулей 16. Стрелками Fв показан воздействующий поток на рули 16.
С помощью шарика 6 на внешнем периметре водила 2, перемещающегося по замкнутой, наклонной к оси обечайки, направляющей на внутренней поверхности обечайки 7, на валу 18 перемещается водило 2 вдоль оси вместе с обечайкой 7, что приводит к перемещению шаровидного конца рычага 4 вдоль паза, изменяя расстояние центра шара от оси вращения водила 2 и, как следствие, амплитуду колебания коромысла 5, а частота вращения водила определяет частоту колебания коромысла. Перемещение шарика 6 обеспечивается вращением обечайки 7 относительно водила 2 от привода 10 через прибор 9 и зубчатое колесо 8 по команде управления по соответствующему каналу.
При вращении обечайки 7 в одном направлении с водилом 2 и с той же угловой скоростью, что и водило 2, движение рулей осуществляется с равномерным отклонением от нулевого положения.
При разном направлении вращения и различной угловой скорости вращения обечайки 7 относительно вращения водила 2 рули будут колебаться относительно того или иного угла поворота, зависящего от относительной скорости, обеспечивая управляющий момент Мад-Мгд.
Если зафиксировать обечайку 7, повернув ее на тот или иной угол и обеспечив тем самым первоначальное положение водила 2 вдоль оси вращения, то рули также будут колебаться относительно того или иного угла поворота, зависящего от первоначального положения водила 2, обеспечивая управляющий момент.
Таким образом, предложенный механизм в состоянии обеспечить многовариантность синфазного комбинированного управления ракетой от аэродинамческих и газодинамических рулей одновременно по единой команде от блока управления и наведения одним приводом по каналу управления.
Источники информации
1. Управляемый реактивный снаряд 9М117. Техническое описание и инструкция по эксплуатации ЗУБК.10.00.00.000 ТО, М.: Воениздат, 1987, с.10...12.
2. Патент RU 2096734 С1, МПК 7 F42В 15/00, заявка №96109569/02 от 23.05.96 г. (прототип).
3. Патент WO 97/21940, 19.06.97. РСТ заявка RU 2096734 от 05.12.96, МПК 7 F16H 25/06.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАКЕТА С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ | 1996 |
|
RU2096734C1 |
| ВРАЩАЮЩИЙСЯ СНАРЯД С ЭЛЕКТРИЧЕСКИМ РУЛЕВЫМ ПРИВОДОМ | 2005 |
|
RU2285227C1 |
| ЛЕГКОВОЙ ВЕЛОМОБИЛЬ, ПРИВОДИМЫЙ В ДВИЖЕНИЕ МУСКУЛЬНОЙ СИЛОЙ НОГ, СПИНЫ, РУК, ВЕСОМ ВОДИТЕЛЯ И ГРУЗА | 1996 |
|
RU2124450C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ АВИАЦИОННОЙ КРЫЛАТОЙ РАКЕТЫ | 2006 |
|
RU2315261C2 |
| СТЕРЕОТАКСИЧЕСКИЙ АППАРАТ | 2002 |
|
RU2218124C1 |
| РОТОРНАЯ ГИДРОМАШИНА | 2005 |
|
RU2305191C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ ВСТРАИВАЕМЫЙ ЗУБЧАТЫЙ МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ КРУТЯЩЕГО МОМЕНТА, ПРЕОБРАЗОВАТЕЛЬ КРУТЯЩЕГО МОМЕНТА И ПЕРЕДАТОЧНОГО ОТНОШЕНИЯ | 2012 |
|
RU2510696C2 |
| Газодинамическое устройство управления малых габаритов | 2020 |
|
RU2753034C1 |
| УСТРОЙСТВО ДЛЯ РАЗВИТИЯ ОПОРНО-ДВИГАТЕЛЬНЫХ НАВЫКОВ У ДЕТЕЙ | 1992 |
|
RU2071265C1 |
| Блок рулевых приводов ракеты или снаряда | 2020 |
|
RU2740978C1 |
Изобретение относится к области техники вооружению, в частности к рулевым системам ракет. Механизм комбинированного управления ракетой содержит рулевую систему, состоящую из аэродинамических рулей и блока газодинамического управления с четырьмя интерцепторами. Интерцепторы кинематически связаны с аэродинамическими рулями посредством передаточного устройства, который включает водило, обечайку с наклонной замкнутой канавкой, взаимодействующей с шариком. Зубчатое колесо на внешней стороне обечайки входит в зацепление с трибом, установленным на оси сервопривода, а на торцевой поверхности водила расположен наклонный открытый цилиндрический паз, в котором расположен шаровидный конец рычага. Техническим результатом является обеспечение инвариантности синфазного комбинированного управления ракетой от аэродинамических и газодинамических рулей одновременно по единой команде. 1 з.п. ф-лы, 4 ил.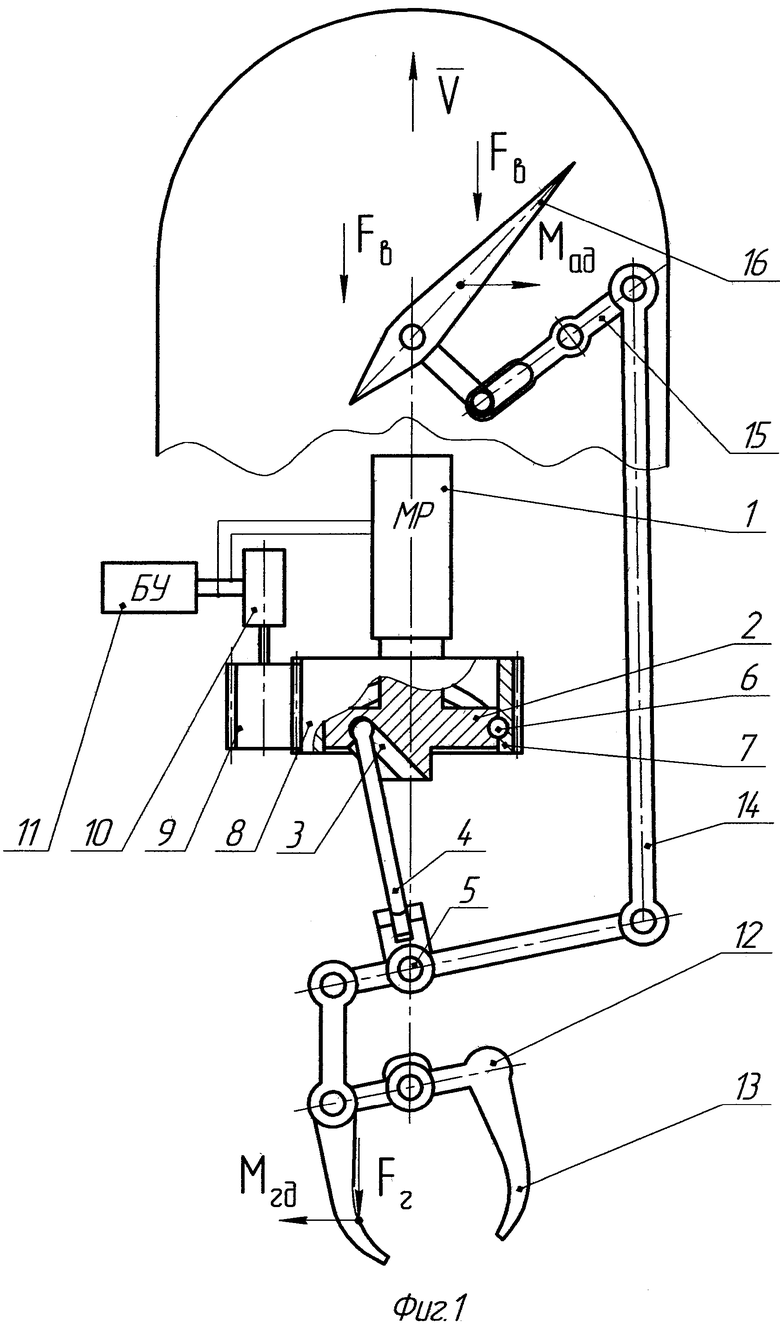
| РАКЕТА С КОМБИНИРОВАННЫМ УПРАВЛЕНИЕМ | 1996 |
|
RU2096734C1 |
| РЕЛЬСОВАЯ КРЕСТОВИНА | 1933 |
|
SU35881A1 |
| ВРАЩАЮЩАЯСЯ УПРАВЛЯЕМАЯ РАКЕТА | 2003 |
|
RU2241953C1 |
| US 3945588, 23.03.1976. | |||

