Настоящее изобретение относится к области силовых установок винтокрылых летательных аппаратов, содержащих несколько двигателей, в частности к области регулирования такой силовой установки.
Объектами настоящего изобретения являются силовая установка для винтокрылого летательного аппарата и винтокрылый летательный аппарат, а также способ регулирования такой силовой установки. Это изобретение предназначено, в частности, для регулирования силовой установки, содержащей три двигателя.
Как правило, силовая установка для винтокрылого летательного аппарата содержит один или два двигателя и главную коробку передачи мощности. Каждый двигатель механически вращает главную коробку передачи мощности с целью приведения во вращение главного выходного вала главной коробки передачи мощности. Этот главный выходной вал соединен во вращении с главным несущим винтом винтокрылого летательного аппарата для обеспечения поддерживающей силы и даже толкающей тяги летательного аппарата.
Эта главная коробка передачи мощности обычно содержит вспомогательные выходные валы, которые могут, например, вращать хвостовой несущий винт или один или два толкающих винта через вспомогательную коробку передачи мощности, а также генератор электрической энергии и/или гидравлические системы. Соответствующие частоты вращения этих вспомогательных выходных валов обычно отличаются от частоты вращения главного выходного вала.
Необходимо отметить, что под двигателем следует понимать силовой блок, механически вращающий упомянутую главную коробку передачи мощности и, следовательно, участвующий в создании вертикальной подъемной силы и/или толкающей тяги винтокрылого летательного аппарата. Такие двигатели являются, например, газотурбинными двигателями, которыми оборудованы винтокрылые летательные аппараты.
Кроме того, в настоящее время на винтокрылых летательных аппаратах используют силовую установку, содержащую два двигателя, при этом каждым двигателем управляет отдельное вычислительное устройство. Как правило, эти двигатели являются идентичными газотурбинными двигателями, работающими в соответствии с правилами регулирования.
Например, существует пропорциональное регулирование, которое позволяет регулировать систему пропорционально отклонению между текущим значением системы, которое необходимо регулировать, и заданным значением. Как правило, такое регулирование является эффективным. С другой стороны, заданное значение при пропорциональном регулировании никогда не достигается, и постоянно существует отклонение между текущим значением и заданным значением. Можно все же приблизиться к этому заданному значению за счет уменьшения этого отклонения, но в этом случае система часто становится нестабильной.
Для улучшения этого регулирования можно вводить дополнительную поправку, которая позволяет устранить погрешности при следовании заданному значению. Эта поправка пропорциональна интегральной составляющей отклонения между текущим значением и заданным значением во времени, то есть пропорциональна сумме всех непрерывно измеряемых отклонений. В этом случае говорят о пропорционально-интегральном регулировании.
Существует также пропорционально-интегрально-дифференциальное регулирование, которое включает в себя дополнительную поправку, пропорциональную дифференциальной составляющей этого отклонения. Эта поправка позволяет учитывать также изменения этого отклонения как по направлению, так и/или по амплитуде.
Пропорционально-интегральное регулирование часто применяют на двухмоторных летательных аппаратах, что позволяет идеально контролировать частоту вращения главного несущего винта, а также характеристики летательного аппарата. Оба двигателя силовой установки работают при этом сбалансированно, что обеспечивает, в частности, симметричный износ этих двигателей, а также износ на уровне механических соединений на входе главной коробки передачи мощности.
С другой стороны, такое пропорционально-интегральное регулирование требует сложных соединений между вычислительными устройствами двух двигателей, чтобы каждый двигатель выдавал эквивалентную мощность. Такое пропорционально-интегральное регулирование требует, в частности, применения контура уравновешивания между двумя вычислительными устройствами.
Кроме того, эти вычислительные устройства должны быть относительно мощными, чтобы обеспечивать такое регулирование. Например, эти вычислительные устройства являются устройствами типа “FADEC”, что является сокращением от английского названия “Full Authority Digital Engine Control”. Эти вычислительные устройства тоже часто являются двуканальными, то есть линии связи между вычислительными устройствами, а также между вычислительными устройствами и двигателями дублированы, чтобы повысить надежность этих линий связи и, следовательно, работы силовой установки.
Кроме того, учитывая тенденцию к увеличению размера винтокрылых летательных аппаратов, то соответственно возрастает потребность в мощности на уровне их силовой установки. Следовательно, силовая установка этих летательных аппаратов должна содержать, по меньшей мере, три двигателя, чтобы выдавать достаточную мощность.
Трехмоторные винтокрылые летательные аппараты оборудованы тремя идентичными двигателями, что обеспечивает, в частности, лучшее реагирование силовой установки в случае неисправности одного двигателя, а также позволяет упростить установку и интегрирование в нее двигателей.
«Идентичными двигателями» называют двигатели, имеющие идентичные характеристики приведения во вращение вращающегося органа.
С другой стороны, «неодинаковыми двигателями» называют двигатели, имеющие разные приводные характеристики, то есть двигатели, развивающие разную максимальную мощность, и/или разные максимальные крутящие моменты, и/или разные максимальные скорости вращения выходного вала. Так, два неодинаковых двигателя могут соответствовать одному двигателю, вращающему выходной вал со скоростью в несколько десятков тысяч оборотов в минуту, и одному двигателю, вращающему выходной вал со скоростью менее десяти тысяч оборотов в минуту.
При силовой установке, содержащей три идентичных двигателя, регулирование этих трех идентичных двигателей является одинаковым, поскольку каждый двигатель выдает эквивалентную мощность.
Вместе с тем, использование такого пропорционально-интегрального регулирования на такой силовой установке связано с несколькими проблемами. Прежде всего необходимо использовать мощные вычислительные устройства, например, типа FADEC, а также соответствующие линии связи между каждым вычислительным устройством каждого двигателя. При этом архитектура линий связи между вычислительными устройствами, а также контуры регулирования являются сложными. Эта архитектура необходима для обеспечения регулирования частоты вращения главного несущего винта, которое одновременно должно быть быстро реагирующим, стабильным и не должно иметь статической ошибки. Поэтому контур уравновешивания между этими вычислительными устройствами становится сложным и длинным.
Кроме того, поскольку эти вычислительные устройства могут быть двухканальными, намного увеличивается сложность линий связи между вычислительными устройствами. Масса электрических жгутов, обеспечивающих эту связь, увеличивается, и их прокладка в летательном аппарате становится очень сложной. Следовательно, стоимость таких контуров регулирования упомянутых, по меньшей мере, трех двигателей этой установки может быть очень высокой.
Можно также для каждого двигателя применять пропорциональное регулирование. Архитектура связей между вычислительными устройствами в этом случае является более простой и при этом позволяет иметь сбалансированные двигатели. С другой стороны, статические погрешности в частоте вращения главного несущего винта летательного аппарата становятся более частыми, поэтому характеристики силовой установки и, следовательно, летательного аппарата сложнее контролировать и оптимизировать.
В трехмоторной силовой установке можно также использовать неодинаковые двигатели, например, чтобы соблюдать требования безопасности или чтобы восполнить недостаточность мощности имеющихся на рынке двигателей.
Однако при трехмоторной силовой установке, содержащей, по меньшей мере, два неодинаковых двигателя, регулирование этих двигателей может оказаться еще более сложным, в частности, на уровне распределения мощности каждого двигателя и регулирования частоты вращения главного несущего винта.
Из уровня техники известен документ US 4479619, в котором предложена система передачи мощности для трехмоторных вертолетов. Запатентованный заявителем вертолет “Super-Frelon” тоже имеет три идентичных двигателя.
В документе US 3963372 предложено решение управления мощностью и контроля двигателей для трехмоторных вертолетов.
Кроме того, в документе US2003/0135305 описана система упреждения крутящего момента, необходимого на уровне главного несущего винта винтокрылого летательного аппарата, в частности позволяющая избегать резкого падения частоты вращения этого главного несущего винта.
Известен также документ US3174551, описывающий устройство, выполненное с возможностью контроля и коррекции разбалансировки мощности, выдаваемой двумя газотурбинными двигателями, которыми оснащен летательный аппарат.
Кроме того, в документе US4522025 описана система управления мощностью и частотой вращения газотурбинных двигателей винтокрылого летательного аппарата.
В прошлом уже рассматривалась возможность установки двигателей с неодинаковой максимальной мощностью в случае двухмоторных летательных аппаратов, чтобы решить проблему увеличения размерности двигателей. В частности, в документе WO 2012/059671 А2 предложены два двигателя с неодинаковой максимальной мощностью. Однако этот документ WO 2012/059671 А2 рассматривает только случай двухмоторных летательных аппаратов и не предлагает решений проблем контроля или стабильности.
Настоящее изобретение предлагает трехмоторную силовую установку, позволяющую упростить архитектуру между вычислительными устройствами каждого двигателя, не ухудшая при этом контроля за частотой вращения главного несущего винта летательного аппарата и позволяя оптимизировать мощность, производимую каждым двигателем.
В частности, настоящее изобретение позволяет регулировать частоту вращения несущего винта летательного аппарата при помощи разного регулирования двигателей.
Согласно изобретению силовая установка содержит две моторные группы и коробку механической передачи мощности. Обе моторные группы механически вращают коробку механической передачи мощности для приведения во вращение, по меньшей мере, одного главного выходного вала этой коробки механической передачи мощности, причем этот главный выходной вал имеет частоту вращения NR.
Эта силовая установка предназначена для оснащения винтокрылого летательного аппарата, при этом коробка механической передачи мощности приводит во вращение, по меньшей мере, один главный несущий винт летательного аппарата через главный выходной вал этой коробки механической передачи мощности.
Эта силовая установка отличается тем, что первая моторная группа содержит, по меньшей мере, один главный двигатель и первое устройство регулирования. Это первое устройство регулирования позволяет регулировать работу каждого главного двигателя по первому заданному значению NR* частоты вращения NR главного выходного вала. Вторая моторная группа содержит, по меньшей мере, один вспомогательный двигатель и второе устройство регулирования. Это второе устройство регулирования позволяет регулировать мощность, выдаваемую каждым вспомогательным двигателем, по второму заданному значению W1* мощности, выдаваемой этой второй моторной группой.
Силовая установка содержит также третье устройство регулирования, позволяющее регулировать работу каждого главного двигателя по третьему заданному значению W2f* упреждения мощности, выдаваемой первой моторной группой. Это третье заданное значение W2f* упреждения мощности определяют таким образом, чтобы первая моторная группа и вторая моторная группа совместно выдавали мощность Ws*, необходимую на уровне главного выходного вала.
Это третье заданное значение W2f* не позволяет регулировать напрямую мощность, выдаваемую первой моторной группой, которую в первую очередь регулирует первое заданное значение NR*, чтобы контролировать частоту вращения NR главного выходного вала силовой установки. С другой стороны, это третье заданное значение W2f* позволяет улучшить реагирование регулирования первой моторной группы, в частности, в переходной фазе, учитывая с упреждением потребность в мощности от этой первой моторной группы и, следовательно, потребность в мощности от силовой установки.
Таким образом, первую моторную группу прежде всего регулируют, чтобы наилучшим образом контролировать частоту вращения NR главного выходного вала этой силовой установки. Эта частота вращения NR главного выходного вала по существу равна первому заданному значению NR*, но все же может слегка колебаться вокруг этого первого заданного значения NR* во время регулирования.
Кроме того, первое устройство регулирования содержит столько же главных вычислительных устройств, сколько имеется главных двигателей, при этом каждое главное вычислительное устройство связано только с одним главным двигателем, причем эти главные вычислительные устройства соединены между собой для обеспечения регулирования главных двигателей. Первая моторная группа обычно содержит, по меньшей мере, два двигателя, которые могут быть идентичными или разными. Предпочтительно первая моторная группа содержит два идентичных двигателя.
Первое устройство регулирования обеспечивает регулирование каждого главного двигателя, например, при помощи пропорционально-интегрального контура регулирования.
В частном случае применения силовой установки в соответствии с изобретением для винтокрылого летательного аппарата первое устройство регулирования позволяет, как и в традиционной силовой установке винтокрылого летательного аппарата, идеально контролировать частоту вращения NR главного несущего винта, который приводится во вращение главным выходным валом этой силовой установки. При этом первое устройство регулирования обеспечивает регулирование частоты вращения свободной турбины каждого главного двигателя, причем каждый главный двигатель предпочтительно является газотурбинным двигателем, управляемым главным вычислительным устройством типа FADEC.
Что касается второй моторной группы, то ее регулирование осуществляют через второе устройство регулирования для получения мощности W1. Например, мощность W1, выдаваемая второй моторной группой, по существу равна второму заданному значению W1*, хотя все же может слегка колебаться вокруг этого второго заданного значения W1* во время регулирования.
Кроме того, второе устройство регулирования содержит столько же вспомогательных вычислительных устройств, сколько имеется вспомогательных двигателей, при этом каждое вспомогательное вычислительное устройство связано только с одним вспомогательным двигателем, причем эти вспомогательные вычислительные устройства соединены между собой для обеспечения регулирования вспомогательных двигателей. Предпочтительно вторая моторная группа содержит только один вспомогательный двигатель, который может отличаться от главных двигателей.
Второе устройство регулирования обеспечивает регулирование каждого вспомогательного двигателя, например, при помощи пропорционально-интегрального контура регулирования. Например, это второе устройство регулирования обеспечивает регулирование, как это описано в документе FR2974564.
В частном случае применения силовой установки в соответствии с изобретением для винтокрылого летательного аппарата каждый вспомогательный двигатель является газотурбинным двигателем. Второе устройство регулирования обеспечивает при этом регулирование мощности каждого вспомогательного двигателя для соблюдения второго заданного значения W1* при помощи вспомогательного вычислительного устройства для каждого вспомогательного двигателя, при этом каждое вычислительное устройство может быть устройством типа FADEC.
Второе устройство регулирования может также регулировать вторую моторную группу при помощи индикатора первого предела (ИПП) в случае, когда силовой установкой в соответствии с изобретением оборудован винтокрылый летательный аппарат. При этом второе заданное значение W1* мощности, выдаваемой второй моторной группой, может зависеть от данных, получаемых от индикатора первого предела (ИПП) вспомогательных двигателей.
Предпочтительно второе устройство регулирования содержит средство защиты от превышения скорости главного выходного вала и от превышения скорости каждого вспомогательного двигателя. Под превышением скорости главного выходного вала следует понимать чрезмерную частоту вращения этого главного выходного вала, которая может привести к повреждению, в частности, коробки механической передачи мощности силовой установки в соответствии с изобретением, а также летательного аппарата в случае, когда этой силовой установкой оборудован винтокрылый летательный аппарат. Точно так же под превышением скорости вспомогательного двигателя следует понимать чрезмерную частоту вращения этого вспомогательного двигателя, которая может привести к повреждению этого вспомогательного двигателя.
Действительно, если второе заданное значение W1* является слишком большим, то и мощность W1, выдаваемая второй моторной группой, может быть слишком большой и может привести к такому превышению скорости. В этом случае мощность W1, выдаваемая моторной группой, соответствует заданному значению W1*, умноженному на коэффициент k, причем этот коэффициент k больше нуля и меньше или равен единице.
Этот коэффициент k равен единице, если не обнаруживается никакого превышения скорости. При этом мощность W1, реально выдаваемая второй моторной группой, по существу равна второму заданному значению W1*, хотя все же может слегка колебаться вокруг этого второго заданного значения W1* во время регулирования.
В случае обнаружения такого превышения скорости коэффициент k меньше единицы и превышает ноль. При этом мощность W1, реально выдаваемую второй моторной группой, уменьшают и по существу приводят к значению k.W1*, то есть таким образом, чтобы W1= k.W1*, хотя она может слегка колебаться вокруг этого второго заданного значения k.W1* во время регулирования.
Наконец, первая моторная группа производит мощность W2, чтобы выдавать вместе со второй моторной группой мощность Ws*, необходимую на уровне главного выходного вала. Эта мощность W2, реально выдаваемая первой моторной группой, по существу равна третьему заданному значению W2f*, хотя все же может слегка колебаться вокруг этого третьего заданного значения W2f* во время регулирования.
Мощность Ws*, необходимую на уровне главного выходного вала, можно определять при помощи вычислительного средства, причем эта необходимая мощность Ws* распределена между первой моторной группой и второй моторной группой. По существу, эта необходимая мощность Ws* является суммой второго заданного значения W1* мощности, выдаваемой второй моторной группой, и четвертого заданного значения W2* мощности, то есть Ws*=W1*+W2*. Это вычислительное средство может быть элементом силовой установки в соответствии с изобретением. Вычислительное средство может быть также внешним по отношению к этой силовой установке и может, например, выдавать информацию о мощности Ws*, необходимой на уровне главного выходного вала.
Предпочтительно это вычислительное средство может включать в себя средство упреждения для определения этой мощности Ws*, необходимой на уровне главного выходного вала. Так, необходимую мощность Ws* определяют, учитывая заранее потребности в крутящем моменте и/или в мощности на уровне главного выходного вала.
Например, средство упреждения определяет эту необходимую мощность Ws*, учитывая первое заданное значение NR* частоты вращения NR главного выходного вала и текущую частоту вращения этого главного выходного вала, а также ускорение или замедление главного выходного вала.
В частном варианте силовой установки, которой оборудован винтокрылый летательный аппарат, вычисление упреждения происходит в зависимости от потребностей в КПД летательного аппарата, в частности, на основании данных о состоянии полета и о ситуациях полета летательного аппарата, а также в зависимости от полетных команд, задаваемых пилотом этого летательного аппарата.
Кроме того, в этом случае вычислительное средство, а также третье устройство регулирования могут быть интегрированы непосредственно в оборудование авионики летательного аппарата.
Кроме того, в частном случае данной фазы полета этого летательного аппарата, поскольку регулирование частоты вращения NR главного выходного вала обеспечивается первой моторной группой, мощность Ws*, необходимая для полета летательного аппарата, является постоянной. При этом второе и третье устройства регулирования силовой установки в соответствии с изобретением позволяют корректировать распределение этой необходимой мощности Ws* между каждой моторной группой.
Второе устройство регулирования и третье устройство регулирования могут также регулировать соответственно вторую моторную группу и первую моторную группу при помощи индикатора первого предела (ИПП). Этот инструмент присутствует, в частности, на винтокрылых летательных аппаратах. Кроме того, в случае, когда первое заданное значение W1* является постоянным, использование индикатора первого предела можно ограничить главными двигателями первой группы.
В предпочтительном варианте изобретения первая моторная группа содержит два идентичных главных двигателя, тогда как вторая моторная группа содержит только один вспомогательный двигатель, который может отличаться от главных двигателей. Вспомогательный двигатель может быть более мощным или менее мощным, чем главные двигатели.
Согласно первой версии изобретения третье устройство регулирования использует второе заданное значение W1* для определения третьего заданного значения W2f*. Так, второе заданное значение W1* вычитают из мощности Ws*, необходимой на уровне главного выходного вала, для получения этого третьего заданного значения W2f*. По сути, это третье заданное значение W2f* равно четвертому заданному значению W2*, то есть W2f*=W2* и, следовательно, W2f*=Ws*-W1*.
Согласно второй версии изобретения третье устройство регулирования использует мощность W1, реально выдаваемую второй моторной группой, для определения третьего заданного значения W2f*. Предпочтительно эта вторая версия позволяет учитывать мощность W1, реально выдаваемую второй моторной группой, в случае необходимости уменьшенную при помощи средства защиты. Таким образом, мощность W1, реально выдаваемую второй моторной группой, вычитают из мощности Ws*, необходимой на уровне главного выходного вала, для получения этого третьего заданного значения W2f*. В дальнейшем это уменьшение мощности W1 учитывают и компенсируют в третьем заданном значении W2f*. По существу, это третье заданное значение W2f* может быть таким, что W2f*=Ws*-W1 или W2f*=Ws*-k.W1*.
Можно также записать W2f*=W2*+W1*.(1-k), при этом третье заданное значение W2f* равно четвертому заданному значению W2*, к которому добавляют разность между вторым заданным значением W1* мощности и мощностью W1*, реально выдаваемой второй моторной группой. Таким образом, общая мощность, производимая первой моторной группой и второй моторной группой, равна мощности Ws*, необходимой на уровне главного выходного вала.
Предпочтительно, чтобы не создавать помех при учете мощности W1, реально выдаваемой второй моторной группой, в ходе выработки W2f*, второе устройство регулирования содержит, по меньшей мере, одно средство фильтрации. Каждое средство фильтрации позволяет ограничивать и даже подавлять возбуждения, создаваемые резонансными частотами динамической цепи, связанной с мощностью выдаваемой каждым вспомогательным двигателем второй моторной группы. Каждое средство фильтрации может быть фильтром нижних частот для подавления высоких частот. Каждое средство фильтрации может быть также режекторным фильтром для подавления только некоторых специфических частот, таких как частоты 2 или 3 Герц (2 или 3 Гц).
В этом случае третье заданное значение W2f* является таким, что W2f*=W2*+H.(W1*-W1) или W2f*=W2*+H.[W1*(1-k)], при этом (W1*-W1) является уменьшением мощности W1, учитываемым в третьем заданном значении W2f*, и H.(W1*-W1) является этим уменьшением, фильтрованным, по меньшей мере, одним средством фильтрации.
Кроме того, в предпочтительном варианте изобретения, то есть когда первая моторная группа содержит два идентичных главных двигателя, это третье заданное значение W2f* распределено поровну между каждым главным двигателем. По существу, каждый главный двигатель должен выдавать мощность W
2
f
/mot, такую как 
Таким образом, второй моторной группой управляют только по мощности в соответствии со вторым заданным значением W1*, выработанным вторым устройством регулирования. Кроме того, поскольку первую группу регулируют с целью контроля частоты вращения NR главного выходного вала, то предпочтительно мощность, производимую каждой моторной группой, можно оптимизировать, не ухудшая характеристик силовой установки и, в частности, соблюдая первое заданное значение NR* частоты вращения NR главного выходного вала. Распределение необходимой мощности Ws* между двумя моторными группами, то есть между вторым заданным значением W1* и четвертым заданным значением W2* мощности, можно реализовать при помощи вычислительного средства в зависимости от различных критериев работы силовой установки, которые необходимо оптимизировать.
Например, распределение необходимой мощности Ws* можно определить таким образом, чтобы оптимизировать удельный расход каждого двигателя каждой моторной группы. Удельный расход топлива двигателя является массой расходуемого топлива, поделенной на производимую этим двигателем мощность. Этот удельный расход позволяет, в частности, количественно характеризовать энергетический выход этого двигателя относительно его мощности.
Для некоторых двигателей, когда мощность, выдаваемая двигателем этого типа, уменьшается, его удельный расход может увеличиваться. В этом случае следует определять распределение необходимой мощности Ws* таким образом, чтобы удельный расход главных и вспомогательных двигателей силовой установки был оптимальным, то есть чтобы общий расход топлива был минимальным для данного полета.
Согласно другому примеру распределение необходимой мощности Ws* можно определить таким образом, чтобы оптимизировать техническое обслуживание каждого двигателя каждой моторной группы. Действительно, любой двигатель в ходе эксплуатации подвергается износу и требует времени и стоимости обслуживания пропорционально этому износу. Износ двигателя обычно увеличивается экспоненциально с возрастанием производимой им мощности, но является специфичным для каждого двигателя. Поэтому следует ограничивать мощность, выдаваемую каждым двигателем, чтобы ограничивать его износ. Кроме того, можно определить закономерности распределения мощности, позволяющие учитывать характер износа каждого двигателя и оптимизировать таким образом время и стоимость обслуживания каждой моторной группы.
Наконец, распределение необходимой мощности Ws* можно определить таким образом, чтобы оптимизировать производительность каждого двигателя каждой моторной группы в случае выхода из строя, по меньшей мере, одного из двигателей. Когда один двигатель оказывается неисправным, другой или другие остающиеся в строю двигатели вынуждены работать в специальном режиме, обозначаемом сокращением OEI от английского “One Engine Inoperative”. Этот специальный режим позволяет каждому двигателю развивать мощность большей величины при условии ограничения времени работы.
С другой стороны, для каждого двигателя требуется более или менее длительное конкретное время, чтобы развить максимальную мощность в этом специальном режиме OEI, причем это время в основном зависит от текущей мощности этого двигателя и от его возможностей ускорения.
Для оптимизации безопасности в случае неисправности двигателя силовой установки в соответствии с изобретением следует минимизировать это время, необходимое для достижения этой максимальной мощности на оставшихся двигателях. В этом случае распределение необходимой мощности Ws* определяют таким образом, чтобы минимизировать время, необходимое каждому двигателю для достижения максимальной мощности в специальном режиме OEI.
Кроме того, в случае, когда каждый вспомогательный двигатель является газотурбинным двигателем, второе заданное значение W1* можно трансформировать в пятое заданное значение N1* частоты вращения N1 газового генератора каждого вспомогательного двигателя. Средство конверсии позволяет преобразовать это второе заданное значение W1* мощности в пятое заданное значение N1*. Это средство конверсии может быть интегрировано в вычислительное средство или во второе устройство регулирования силовой установки.
Объектом настоящего изобретения является также винтокрылый летательный аппарат, содержащий, по меньшей мере, один главный несущий винт, описанную выше силовую установку и оборудование авионики. Силовая установка приводит во вращение главный несущий винт, который соединен во вращении с главным выходным валом коробки механической передачи мощности силовой установки. Кроме того, летательный аппарат может содержать хвостовой несущий винт или, по меньшей мере, один толкающий винт. Этот хвостовой несущий винт или каждый толкающий винт может тоже приводиться во вращении этой коробкой механической передачи мощности через вспомогательный выходной вал.
Кроме того, в оборудование авионики летательного аппарата могут быть включены третье устройство регулирования, а также вычислительное средство.
Кроме того, второе устройство регулирования может находиться в составе оборудования авионики летательного аппарата.
Объектом настоящего изобретения является также способ регулирования силовой установки винтокрылого летательного аппарата. Эта силовая установка содержит первую моторную группу, вторую моторную группу и коробку механической передачи мощности, при этом обе моторные группы механически вращают коробку механической передачи мощности для приведения во вращение главного выходного вала этой коробки механической передачи мощности. Этот главный выходной вал имеет частоту вращения NR и соединен во вращении с главным несущим винтом летательного аппарата.
В ходе этого способа:
- определяют мощность Ws*, необходимую на уровне главного выходного вала, и первое заданное значение NR* частоты вращения NR этого главного выходного вала,
- определяют второе заданное значение W1* мощности для второй моторной группы,
- регулируют первую моторную группу, содержащую, по меньшей мере, один главный двигатель, по первому заданному значению NR* частоты вращения NR,
- регулируют мощность, производимую второй моторной группой, содержащей, по меньшей мере, один вспомогательный двигатель, по второму заданному значению W1*,
- определяют третье заданное значение W2f* упреждения мощности для первой моторной группы и
- регулируют работу первой моторной группы по этому третьему заданному значению W2f* упреждения мощности таким образом, чтобы первая моторная группа и вторая моторная группа совместно выдавали необходимую мощность Ws*.
Это третье заданное значение W2f* не позволяет регулировать напрямую мощность, производимую первой моторной группой, которую преимущественно регулируют при помощи первого заданного значения NR*. С другой стороны, это третье заданное значение W2f* позволяет улучшить способность реагирования первой моторной группы, учитывая путем упреждения потребность в мощности этой первой группы.
Кроме того, второе заданное значение W1* мощности можно корректировать при помощи средства защиты, чтобы избегать превышения скорости главного выходного вала и/или каждого вспомогательного двигателя.
Точно так же, поскольку вторая моторная группа реально выдает мощность W1, эту мощность W1 можно фильтровать при помощи, по меньшей мере, одного средства фильтрации, при этом упомянутое третье заданное значение W2f* определяют таким образом, что W2f*=W2*H.(W1*-W1), при этом (W1*-W1) является разностью между мощностью W1 и вторым заданным значением W1*, а H.(W1*-W1) является этим уменьшением, фильтрованным упомянутым средством фильтрации.
Изобретение и его преимущества будут более очевидны из нижеследующего описания иллюстративных примеров выполнения со ссылками на прилагаемые чертежи, на которых:
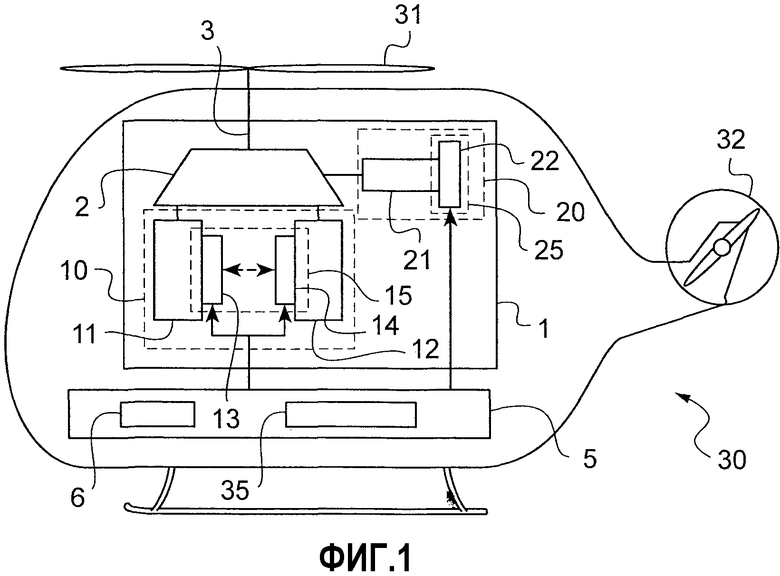
Фиг. 1 изображает винтокрылый летательный аппарат, оборудованный силовой установкой в соответствии с изобретением.
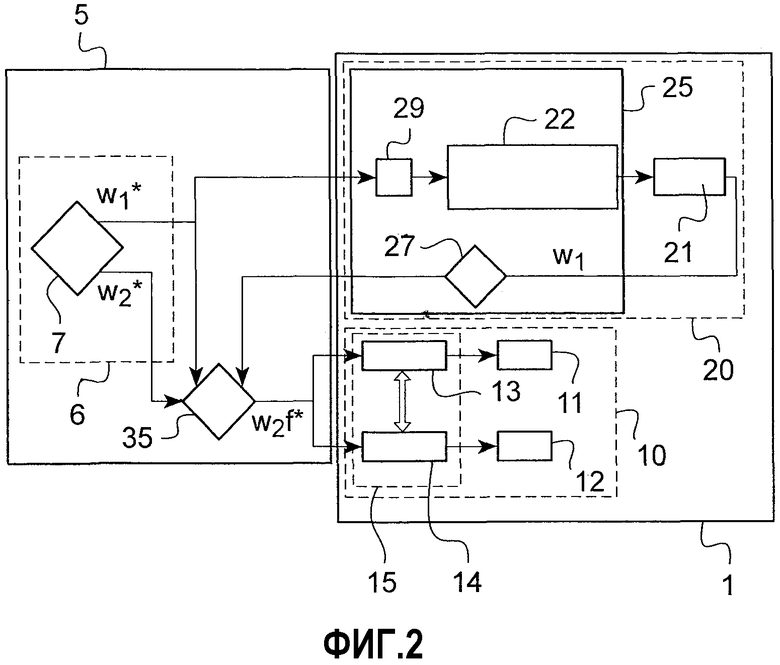
Фиг. 2 - предпочтительный вариант выполнения силовой установки в соответствии с изобретением.
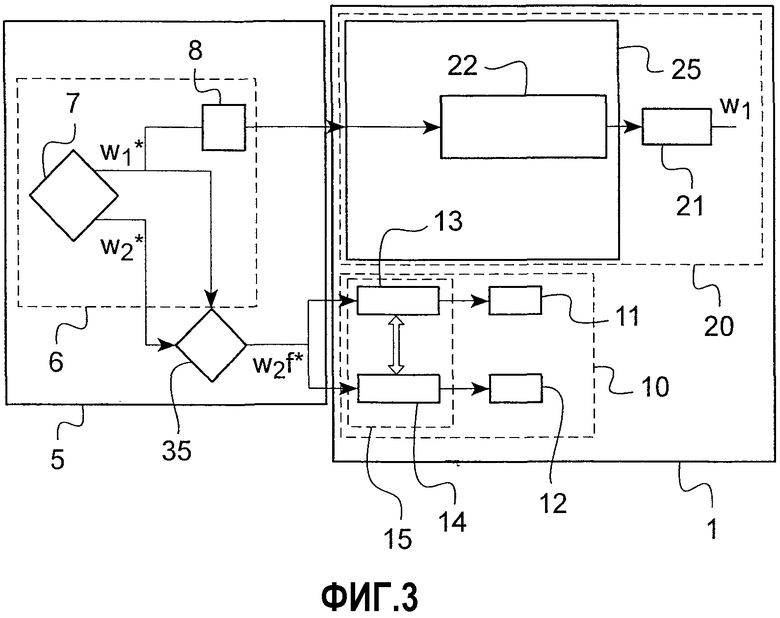
Фиг. 3 - другой вариант выполнения силовой установки в соответствии с изобретением.
Элементы, показанные на разных фигурах, обозначены одинаковыми позициями.
На Фиг. 1 показан винтокрылый летательный аппарат 30, содержащий главный несущий винт 31, хвостовой несущий винт 32, силовую установку 1 и оборудование авионики 5. Силовая установка 1 содержит первую моторную группу 10, вторую моторную группу 20 и коробку 2 механической передачи мощности. Обе моторные группы 10, 20 механически вращают коробку 2 механической передачи мощности для приведения во вращение главного выходного вала 3 этой коробки 2 механической передачи мощности. Этот главный выходной вал 3 соединен во вращении с главным несущим винтом 31 для обеспечения поддерживающей силы и даже толкающей тяги летательного аппарата 30.
Хвостовой несущий винт 32 тоже может приводиться во вращение коробкой 2 механической передачи мощности через вспомогательный выходной вал этой коробки 2 механической передачи мощности.
Первая моторная группа 10 содержит два идентичных главных двигателя 11, 12 и первое устройство 15 регулирования. Это первое устройство 15 регулирования содержит два главных вычислительных устройства 13, 14, при этом каждое главное вычислительное устройство 13, 14 связано только с одним главным двигателем 11, 12 и главные вычислительные устройства 13, 14 связаны также друг с другом.
Вторая моторная группа 20 содержит вспомогательный двигатель 21 и второе устройство 25 регулирования. Это второе устройство 25 регулирования содержит вспомогательное вычислительное устройство 22, связанное с вспомогательным двигателем 21.
Главные двигатели 11, 12, а также вспомогательный двигатель 21 являются газотурбинными двигателями, содержащими газогенератор и свободную турбину, вращающую коробку 2 механической передачи мощности.
Оборудование авионики 5 содержит третье устройство 35 регулирования, а также вычислительное средство 6.
На Фиг. 2 и 3 более конкретно показана силовая установка 1 согласно двум вариантам выполнения, при этом на Фиг. 2 представлен предпочтительный вариант выполнения силовой установки 1 в соответствии с изобретением.
Вычислительное средство 6 позволяет определять мощность Ws*, необходимую на уровне главного выходного вала 3 и, следовательно, главного несущего винта 31. Для этого вычислительное средство 6 содержит средство 7 упреждения, чтобы определять эту мощность Ws*, необходимую на уровне главного выходного вала 3, учитывая, в частности, потребности в крутящем моменте и/или в мощности на уровне главного выходного вала 3 и главного несущего винта 31 в зависимости от полетных команд, подаваемых пилотом этого летательного аппарата 30.
Первое устройство 15 регулирования позволяет регулировать работу двух главных двигателей 11, 12 по первому заданному значению NR* частоты вращения NR главного выходного вала 3 и главного несущего винта 31.
Это первое устройство 15 регулирования обеспечивает, например, регулирование двух главных двигателей 11, 12 при помощи пропорционально-интегрального контура регулирования. Поскольку эти два главных двигателя 11, 12 являются идентичными, их работа является симметричной, при этом каждый главный двигатель 11, 12 участвует в равной степени во вращении главного несущего винта 31 через главный выходной вал 3.
Таким образом, благодаря первому устройству 15 регулирования первая моторная группа 10 позволяет контролировать частоту вращения NR главного выходного вала 3 и главного несущего винта 31, причем эта частота вращения NR по существу равна первому заданному значению NR*.
Второе устройство 25 регулирования позволяет регулировать мощность, выдаваемую каждым вспомогательным двигателем 21, образующим вторую моторную группу 20, по второму заданному значению W1* мощности, выдаваемой этой второй моторной группой 20.
Это второе устройство 25 регулирования содержит средство 29 защиты от превышения скорости главного выходного вала 3 и, следовательно, главного несущего винта 31 и от превышения скорости каждого вспомогательного двигателя 21. Это второе устройство 25 регулирования умножает второе заданное значение W1* на коэффициент k, причем этот коэффициент k больше нуля и меньше или равен единице.
Если никакого превышения скорости не обнаруживается, коэффициент k равен единице. В случае обнаружения такого превышения скорости коэффициент k меньше единицы и больше нуля. Во всех случаях мощность W1, реально выдаваемая второй моторной группой 20, по существу равна значению k.W1*, хотя может все же слегка колебаться вокруг этого значения k.W1* в ходе регулирования, причем этот коэффициент k больше нуля и меньше или равен единице.
Второе устройство 25 регулирования обеспечивает это регулирование вспомогательного двигателя 21 при помощи пропорционально-интегрального контура регулирования.
Третье устройство 35 регулирования позволяет регулировать работу двух главных двигателей 11, 12 по третьему заданному значению W2f* упреждения мощности, выдаваемой этой первой моторной группой 10. При этом первая моторная группа 10 производит мощность W2, по существу равную этому третьему заданному значению W2f*, хотя все же слегка колеблющуюся вокруг этого третьего заданного значения W2f* в ходе регулирования.
Это третье заданное значение W2f* не позволяет регулировать напрямую мощность, выдаваемую первой моторной группой 10, которую регулируют по первому заданному значению NR*. С другой стороны, это третье заданное значение W2f* позволяет улучшить способность реагирования регулирования первой моторной группы, учитывая с упреждением потребность мощности этой первой моторной группы 10.
Это третье заданное значение W2f* упреждения мощности определяют таким образом, чтобы первая моторная группа 10 и вторая моторная группа 20 совместно производили мощность Ws*, необходимую на уровне главного выходного вала 3.
Мощность Ws*, необходимая на уровне главного выходного вала 3 и определяемая вычислительным средством 6, распределяется между первой моторной группой 10 и второй моторной группой 20. Эта необходимая мощность Ws* является суммой второго заданного значения W1* мощности и четвертого заданного значения W2* мощности, то есть Ws*=W1* + W2*.
Если средство 29 защиты не обнаруживает превышения скорости, коэффициент k равен единице. Следовательно, мощность W1, реально выдаваемая второй моторной группой 20, по существу равна второму заданному значению W1*. Таким образом, третье заданное значение W2f* равно четвертому заданному значению W2*, то есть W2f*= W2* и, следовательно, W2f*=Ws*-W1*.
С другой стороны, в случае обнаружения такого превышения скорости коэффициент k меньше единицы и больше нуля. При этом мощность W1, реально выдаваемая второй моторной группой 20, по существу равна второму значению k.W1*. Следовательно, третье заданное значение W2f* равно четвертому заданному значению W2*, к которому необходимо добавить разность между вторым заданным значением W1* и реально выдаваемой мощностью W1, то есть W2f*=W2*+(W1*-W1). Отсюда выводят, что вторым заданным значением является W2f*=Ws*-W1, то есть W2f*=Ws*-k.W1*.
Таким образом, общая мощность, выдаваемая силовой установкой 1, равна мощности Ws*, необходимой на уровне главного выходного вала 2 и главного несущего винта 31.
Кроме того, чтобы не создавать помех в третьем средстве 35 регулирования, второе устройство 25 регулирования содержит средство 26 фильтрации. Это средство 26 фильтрации позволяет, в частности, ограничивать и даже подавлять возбуждения, создаваемые резонансными частотами динамической цепи, связанной с мощностью W2*, выдаваемой вспомогательным двигателем 21. Это средство 26 фильтрации может быть фильтром нижних частот или режекторным фильтром.
В этом случае третье заданное значение W2f* является таким, что W2f*=W2*+H.(W1*-W1) или W2f*=W2*+H.[W1*(1-k)], при этом H.(W1*-W1) является разностью между мощностью W1 и вторым заданным значением W1*, фильтрованным средством 26 фильтрации.
Кроме того, поскольку два главных двигателя 11, 12 являются идентичными, это третье заданное значение W2f* распределено поровну между каждым главным двигателем 11. 12. По существу, каждый главный двигатель должен выдавать мощность W
2
f
/mot, такую как 
Кроме того, распределение необходимой мощности Ws* между двумя моторными группами 10, 20, то есть между вторым заданным значением W1* и четвертым заданным значением W2*, можно реализовать при помощи вычислительного средства 6 в зависимости от различных критериев работы силовой установки 1.
Например, распределение необходимой мощности Ws* можно определить таким образом, чтобы оптимизировать удельный расход двух главных двигателей 11, 12 и вспомогательного двигателя 21, то есть таким образом, чтобы сумма значений удельного расхода главных двигателей 11, 12 и вспомогательного двигателя 21 была минимальной.
Согласно другому примеру распределение необходимой мощности Ws* можно определить таким образом, чтобы оптимизировать техническое обслуживание каждого двигателя 11, 12, 21 силовой установки 1.
Наконец, распределение необходимой мощности Ws* можно определить таким образом, чтобы оптимизировать производительность каждого двигателя 11, 12, 21 силовой установки 1 в случае выхода из строя, по меньшей мере, одного из двигателей 11, 12, 21, например, сводя к минимуму время, необходимое каждому двигателю 11, 12, 21, чтобы достигнуть максимальной мощности в специальном режиме OEI.
На Фиг. 3 представлен другой вариант выполнения силовой установки 1 в соответствии с изобретением.
Согласно этому варианту выполнения третье устройство 35 регулирования использует второе заданное значение W1* для определения третьего заданного значения W2f*. Так, второе заданное значение W1* вычитают из мощности Ws*, необходимой на уровне главного выходного вала 3, чтобы получить это третье заданное значение W2f*. По существу это третье заданное значение W2f* равно четвертому заданному значению W2*, то есть W2f*=W2* и, следовательно, W2f*=Ws*-W1*.
Вычислительное средство 6 содержит средство 8 конверсии для преобразования второго заданного значения W1* мощности в пятое заданное значение N1*. Таким образом, второе средство 25 регулирования позволяет регулировать частоту вращения N1 газогенератора вспомогательного двигателя 21 по этому пятому заданному значению N1*. При этом частота вращения N1 газогенератора вспомогательного двигателя 21 по существу равна этому пятому заданному значению N1*, хотя и может слегка колебаться вокруг этого пятого заданного значения N1*.
Естественно, в настоящее изобретение можно вносить различные изменения в том, что касается его применения. Хотя были представлены несколько вариантов выполнения, понятно, что все возможные варианты невозможно идентифицировать избыточно. Разумеется, не выходя за рамки изобретения, можно заменить описанное средство эквивалентным средством.
Объектом настоящего изобретения является силовая установка, содержащая две моторные группы и коробку механической передачи мощности. Каждая моторная группа механически вращает коробку механической передачи мощности для приведения во вращение главного выходного вала и, следовательно, главного несущего винта упомянутого летательного аппарата по частоте вращения NR. Первую моторную группу, содержащую два главных двигателя, регулируют по первому заданному значению NR* упомянутой частоты вращения NR, тогда как вторую моторную группу, содержащую вспомогательный двигатель, регулируют по второму заданному значению W1* мощности упомянутой второй моторной группы. Кроме того, работу упомянутой первой моторной группы регулируют по третьему заданному значению W2f* упреждения мощности такому, что упомянутая первая моторная группа и упомянутая вторая моторная группа совместно выдают мощность Ws*, необходимую на уровне главного несущего винта. Такое выполнение трехмоторной силовой установки позволяет упростить архитектуру между вычислительными устройствами каждого двигателя и оптимизировать мощность, производимую каждым двигателем. 3 н. и 13 з.п. ф-лы, 3 ил.
1. Силовая установка (1), содержащая две моторные группы (10, 20) и коробку (2) механической передачи мощности, при этом обе моторные группы (10, 20) выполнены с возможностью механического вращения коробки (2) механической передачи мощности для приведения во вращение, по меньшей мере, одного главного выходного вала (3) упомянутой коробки (2) механической передачи мощности, при этом упомянутый главный выходной вал (3) имеет частоту вращения NR,
отличающаяся тем, что первая моторная группа (10) содержит, по меньшей мере, один главный двигатель (11, 12) и первое устройство (15) регулирования, выполненное с возможностью регулирования работы каждого главного двигателя (11, 12) по первому заданному значению NR* частоты вращения NR главного выходного вала (3), а вторая моторная группа (20) содержит, по меньшей мере, один вспомогательный двигатель (21) и второе устройство (25) регулирования, выполненное с возможностью регулирования мощности, выдаваемой каждым вспомогательным двигателем (21), по второму заданному значению W1* мощности второй моторной группы (20), при этом силовая установка (1) содержит третье устройство (35) регулирования, выполненное с возможностью регулирования работы первой моторной группы (10) по третьему заданному значению W2f* упреждения мощности такому, что первая моторная группа (10) и вторая моторная группа (20) совместно выдают Ws*, необходимую на уровне главного выходного вала (3), при этом упомянутую необходимую мощность Ws* определяют при помощи вычислительного средства (6).
2. Силовая установка (1) по п. 1, отличающаяся тем, что вычислительное средство (6) содержит средство (7) упреждения, при этом необходимую мощность Ws* определяют при помощи средства (7) упреждения.
3. Силовая установка (1) по любому из пп. 1-2, отличающаяся тем, что второе устройство (25) регулирования содержит средство (29) защиты от превышения скорости главного выходного вала (3) и/или каждого вспомогательного двигателя (21).
4. Силовая установка (1) по любому из пп. 1-2, отличающаяся тем, что второе устройство (25) регулирования содержит, по меньшей мере, одно средство (26) фильтрации.
5. Силовая установка (1) по п. 4, отличающаяся тем, что третье заданное значение W2f* упреждения является таким, что W2f*=W2*+H.(W1*-W1), при этом (W1*-W1) является разностью между мощностью W1, реально выдаваемой второй моторной группой (20), и вторым заданным значением W1*, и H.(W1*-W1) является этой разностью, фильтрованной при помощи, по меньшей мере, одного средства (26) фильтрации.
6. Силовая установка (1) по любому из пп. 1-2, отличающаяся тем, что первая моторная группа (10) содержит два идентичных главных двигателя (11, 12).
7. Силовая установка (1) по любому из пп. 1-2, отличающаяся тем, что второе заданное значение W1* мощности определяют таким образом, чтобы оптимизировать удельный расход каждого двигателя (11, 12, 21) каждой моторной группы (10, 20).
8. Силовая установка (1) по любому из пп. 1-2, отличающаяся тем, что второе заданное значение W1* мощности определяют таким образом, чтобы оптимизировать техническое обслуживание каждого двигателя (11, 12, 21) каждой моторной группы (10, 20).
9. Силовая установка (1) по любому из пп. 1-2, отличающаяся тем, что второе заданное значение W1* мощности определяют таким образом, чтобы оптимизировать производительность каждого двигателя (11, 12, 21) каждой моторной группы (10, 20) в случае неисправности, по меньшей мере, одного из двигателей (11, 12, 21).
10. Силовая установка (1) по любому из пп. 1-2, отличающаяся тем, что первое устройство (15) регулирования содержит, по меньшей мере, одно главное вычислительное устройство (13, 14), при этом каждое главное вычислительное устройство (13, 14) связано только с одним главным двигателем (11, 12), и второе устройство (25) регулирования содержит, по меньшей мере, одно вспомогательное вычислительное устройство (22), при этом каждое вспомогательное вычислительное устройство (22) связано только с одним вспомогательным двигателем (21).
11. Силовая установка (1) по любому из пп. 1-2, отличающаяся тем, что, поскольку каждый вспомогательный двигатель (21) является газотурбинным двигателем, оборудованным газогенератором, упомянутое второе заданное значение W1* трансформируют в пятое заданное значение N1* частоты вращения N1 газового генератора, при этом второе устройство (25) регулирования содержит средство (8) конверсии, преобразующее упомянутое второе заданное значение W1* мощности в упомянутое пятое заданное значение N1* частоты вращения газогенератора.
12. Винтокрылый летательный аппарат (30), содержащий, по меньшей мере, один главный несущий винт (31), силовую установку (1) и оборудование авионики (5), при этом силовая установка (1) приводит во вращение упомянутый главный несущий винт (31), отличающийся тем, что силовая установка (1) выполнена по любому из пп. 1-11.
13. Летательный аппарат (30) по п. 12, отличающийся тем, что вычислительное средство (6), второе устройство (25) регулирования и третье устройство (35) регулирования входят в состав оборудования авионики (5).
14. Способ регулирования силовой установки (1) винтокрылого летательного аппарата (30), при этом упомянутая силовая установка (1) содержит первую моторную группу (10), вторую моторную группу (20) и коробку (2) механической передачи мощности, при этом обе моторные группы (10, 20) выполнены с возможностью механического вращения упомянутой коробки (2) механической передачи мощности для приведения во вращение главного выходного вала (3) упомянутой коробки (2) механической передачи мощности, при этом главный выходной вал (3) имеет частоту вращения NR и соединен во вращении с главным несущим винтом (31) летательного аппарата (30),
в ходе которого:
- определяют мощность Ws*, необходимую на уровне упомянутого главного выходного вала (3), и первое заданное значение NR* частоты вращения NR упомянутого главного выходного вала (3),
- определяют второе заданное значение W1* мощности, выдаваемой второй моторной группой (20),
- регулируют первую моторную группу (10), содержащую, по меньшей мере, один главный двигатель (11, 12), по упомянутому первому заданному значению NR* упомянутой частоты вращения NR,
- регулируют мощность, производимую второй моторной группой (20), содержащей, по меньшей мере, один вспомогательный двигатель (21), по упомянутому второму заданному значению W1* мощности,
- определяют третье заданное значение W2f* упреждения мощности, выдаваемой первой моторной группой (10), и
- регулируют работу первой моторной группы (10) по упомянутому третьему заданному значению W2f* упреждения мощности таким образом, чтобы первая моторная группа (10) и вторая моторная группа (20) совместно выдавали упомянутую необходимую мощность Ws*.
15. Способ регулирования силовой установки (1) по п. 14, отличающийся тем, что упомянутое второе заданное значение W1* мощности корректируют при помощи средства защиты (29), чтобы избегать превышения скорости главного выходного вала (3) и/или каждого вспомогательного двигателя (21).
16. Способ регулирования силовой установки (1) по любому из пп. 14-15, отличающийся тем, что мощность W1, реально выдаваемую второй моторной группой (20), фильтруют при помощи, по меньшей мере, одного средства (26) фильтрации, при этом упомянутое третье заданное значение W2f* упреждения мощности определяют таким образом, что W2f*=W2*+H.(W1*-W1), при этом (W1*-W1) является разностью между упомянутой мощностью W1, реально выдаваемой второй моторной группой (20), и упомянутым вторым заданным значением W1* и H.(W1*-W1) является этой разностью, фильтрованной средством (26) фильтрации.
| US4479619A,30.10.1984 | |||
| US3963372A1, 15.06.1976 | |||
| US20030135305A1,17.07.2003 | |||
| US3174551A1,23.03.1965 | |||
| US4522025A1,11.06.1985 | |||
| WO2012059671A2,10.02.2012 | |||
| FR2974564A1,02.11.2012 | |||
| Мостовой кран с подъемно-поворотной штангой, несущей захватный орган | 1958 |
|
SU119322A1 |
| Механический зажим для соединения двух деталей | 1959 |
|
SU124246A1 |

