Предпосылки создания изобретения
Настоящее изобретение относится к винтокрылому летательному аппарату, а более конкретно - к компоновке привода высокоскоростного летательного аппарата сложной схемы или с соосными несущими винтами противовращения, в котором система поступательной тяги сообщает поступательную тягу, а система несущих винтов работает на сниженной скорости полета в условиях обратного воздушного потока в ходе высокоскоростного полета.
Обычные винтокрылые летательные аппараты имеют скорость поступательного полета, которая ограничена рядом факторов. Среди них - тенденция отступающей лопасти отрывать поток на больших скоростях поступательного полета. Когда скорость поступательного полета возрастает, скорость воздушного потока на отступающей лопасти уменьшается настолько, что лопасть может войти в состояние срыва потока. В отличие от этого скорость воздушного потока на наступающей лопасти увеличивается с возрастанием скорости поступательного полета. Таким образом, поступательное движение вертолета создает асимметрию подъемной силы.
Эта асимметрия может создавать неустойчивое состояние, если подъемная сила не сбалансирована по наступающему и отступающему секторам диска несущего винта. Как правило, для балансировки подъемной силы используют качание и флюгирование лопастей.
Вместе с тем, когда скорость поступательного полета увеличивается, выходя за пределы заданного значения для заданных оборотов несущего винта в минуту, воздействие качания и флюгирования становится неадекватным для поддержания, по существу, одинаковой подъемной силы на диске несущего винта. В этот момент обратный воздушный поток на отступающей лопасти создает отрицательную подъемную силу и - в зависимости от скорости поступательного полета - создает состояние срыва потока или отрицательной подъемной силы, которое распространяется по лопасти с увеличением скорости полета. Обычные несущие винты должны работать на скоростях полета ниже тех, которые вызывают обратный воздушный поток по существенной части отступающей лопасти, и на оборотах в минуту, которые ниже вызывающих проблемы сжимаемости, обусловленные числом Маха, на законцовке наступающей лопасти. Эта причина существенно ограничила скорости поступательного полета обычных вертолетов значением, составляющим приблизительно 180 узлов.
Винтокрылый летательный аппарат с системой соосных несущих винтов противовращения способен работать на более высоких скоростях по сравнению с обычными одновинтовыми вертолетами, в частности, благодаря балансировке подъемной силы между наступающими сторонами лопастей несущих винтов в системах верхнего и нижнего несущих винтов. Кроме того, на отступающих сторонах несущих винтов также обычно не возникает классический срыв потока на отступающей лопасти, которым могут страдать обычные одновинтовые или двухвинтовые вертолеты.
Чтобы еще больше увеличить скорость полета летательный аппарат сложной схемы или с соосными несущими винтами противовращения эксплуатирует систему в состоянии авторотации при наличии дополнительной поступательной тяги, обеспечиваемой турбореактивными двигателями. Во время высокоскоростного полета система несущих винтов разгружена от двигателей (или турбовалов) привода несущих винтов, а средства управления оборотами винтов в минуту ограничиваются регулированием общего шага. Для любого вертолета, находящегося в состоянии авторотации, увеличение общего шага уменьшает скорость вращения, а уменьшение общего шага увеличивает скорость вращения. Вместе с тем, для винтокрылого летательного аппарата в режиме высокоскоростного полета количество оборотов несущего винта в минуту предпочтительно снижают, чтобы предотвратить попадание законцовок лопастей несущих винтов на наступающих сторонах дисков несущих винтов в сверхзвуковую область по мере возрастания скорости полета летательного аппарата. Обязательное снижение оборотов в минуту при переходе из режима зависания в режим полета с высокой скоростью, как правило, составляет порядка 30%. Вообще говоря, авторотация - это состояние полета винтокрылого летательного аппарата, в котором сила, вращающая лопасти, имеет своим источником воздушный поток, попадающий на нижнюю сторону несущих винтов. Источником этого воздушного потока обычно является либо движение летательного аппарата вниз, например, происходящее после отказа двигателей, или движение летательного аппарата вперед, например, при горизонтальном полете автожира.
Когда скорость поступательного полета увеличивается, увеличивается и общий шаг, предотвращая увеличение оборотов несущего винта в минуту до нежелательного уровня. Это требует увеличения угла атаки на наступающей стороне (УАПС) при увеличении скорости, что в свою очередь создает увеличенную подъемную силу, большее сопутствующее лобовое сопротивление и больший изгибающий момент на валу несущего винта. Увеличенная подъемная сила в целом балансируется отступающей стороной диска несущего винта. Поскольку внутренний участок отступающей стороны находится в обратном потоке и поскольку есть общий шаг, УАПС становится отрицательным. Это приводит к созданию отрицательной подъемной сил. Момент, возникающий из-за увеличенной подъемной силы на наступающей стороне, прибавляется к моменту, возникающему из-за отрицательной подъемной силы на отступающей стороне. Этот момент обычно компенсируется одинаковым по величине и противоположным по направлению моментом другого несущего винта в системе соосных несущих винтов противовращения. Вместе с тем, любое изменение фазы или амплитуды системы верхнего и нижнего несущих винтов приводит к возникновению вибрации, которая распространяется на остальной корпус.
Соответственно, требуется разработать систему привода несущих винтов и управления ими для высокоскоростного винтокрылого летательного аппарата, которая минимизирует основной источник вибрации и соответствующее ухудшение рабочих параметров.
Краткое изложение сущности изобретения
Система привода для высокоскоростного винтокрылого летательного аппарата в соответствии с настоящим изобретением может включать в себя систему двух соосных несущих винтов противовращения и систему поступательной тяги для обеспечения поступательной тяги, в основном параллельной продольной оси летательного аппарата при работе системы несущих винтов в состоянии авторотации или состоянии обратного потока в некотором диапазоне режимов высокоскоростного поступательного полета.
Редуктор-объединитель, введенный в зацепление с основным редуктором, приводится в действие одним или несколькими двигателями таким образом, что ими приводятся в действие основной редуктор и система поступательной тяги. Двигатель приводит в действие редуктор-объединитель и основной редуктор посредством обгонной муфты.
Система привода позволяет управлять оборотами в минуту, развиваемыми системой несущих винтов, за счет разгрузки крутящего момента на систему поступательной тяги. То есть, крутящий момент, развиваемый системой несущих винтов в результате авторотации в режиме высокоскоростного полета, поглощается системой поступательной тяги, так что наступающая сторона лопастей несущих винтов не достигает сверхзвуковых скоростей и оказывается возможным расположение отступающей стороны лопастей несущих винтов с нулевым шагом в результате использования малого общего и отличающегося циклического шага, вследствие чего отрицательная подъемная сила на отступающей стороне устраняется, а направленная вверх подъемная сила на наступающей стороне уменьшается. Таким образом, снижаются вибрации, воздействующие на корпус.
Система привода предпочтительно имеет такую конфигурацию, что при отказе двигателя толкающий воздушный винт системы поступательной тяги устанавливается с обеспечением нулевого шага, а в противном случае нагрузка, прикладываемая к системе привода, замедляла бы систему несущих винтов и препятствовала бы приземлению в состоянии авторотации.
Следовательно, в настоящем изобретении предложена система привода несущих винтов и управления ими для высокоскоростного винтокрылого летательного аппарата, которая минимизирует основной источник вибрации и ухудшение рабочих параметров.
Краткое описание чертежей
Различные признаки и преимущества изобретения очевидны для специалистов в данной области техники из нижеследующего подробного описания предпочтительного варианта осуществления. Ниже приводится краткое описание чертежей, прилагаемых к подробному описанию:
Фиг.1А-1Б - общие виды возможного варианта осуществления винтокрылого летательного аппарата, предназначенного для использования с настоящим изобретением;
Фиг.2 - блок-схема системы привода согласно настоящему изобретению;
Фиг.3 - схематическое изображение динамических параметров несущих винтов системы соосных несущих винтов противоположного вращения; и
Фиг.4 - блок-схема системы управления полетом.
Подробное описание предпочтительного
варианта осуществления
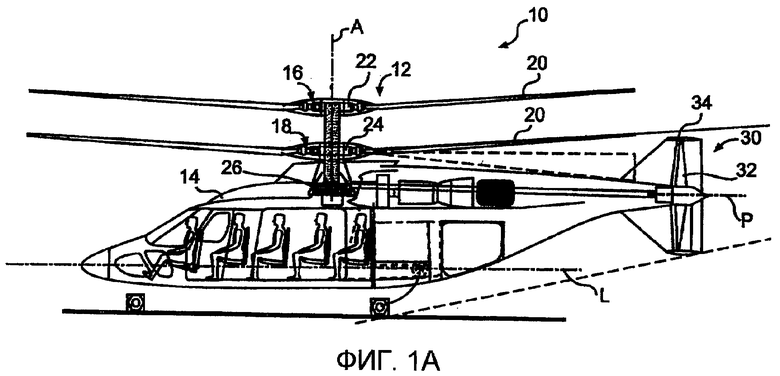
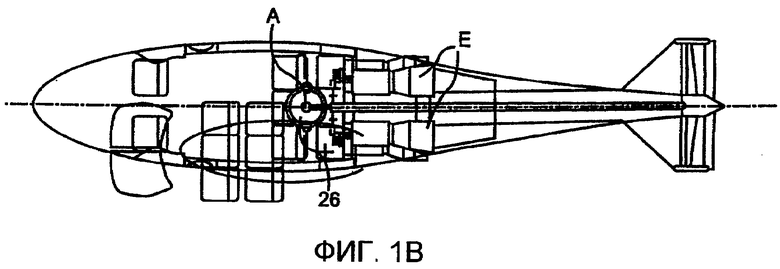
На Фиг.1А-1Б показан пример высокоскоростного винтокрылого летательного аппарата 10 вертикального взлета и посадки (ВВиП), имеющего сложную схему или соосные несущие винты противовращения (и собирательно именуемый далее винтокрылым летательным аппаратом), а также систему 12 двух соосных несущих винтов противовращения, которая вращается вокруг оси А вращения несущих винтов. Летательный аппарат 10 включает в себя планер 14, который несет систему 12 двух соосных несущих винтов противовращения, а также систему 30 поступательной тяги, которая обеспечивает поступательную тягу, в основном, параллельно продольной оси L летательного аппарата, когда система 12 несущих винтов работает в состоянии авторотации или состоянии обратного потока в диапазоне режимов высокоскоростного поступательного полета. Очевидным является, что настоящее изобретение будет выгодным и при других конфигурациях летательного аппарата.
Система 12 несущих винтов включает в себя систему 16 первого несущего винта и систему 18 второго несущего винта, причем каждая система 16 и 18 несущего винта включает в себя множество лопастей 20 несущего винта, установленных на втулку 22, 24 несущего винта. Система 12 несущих винтов приводится в движение с помощью основного редуктора 26. Система 30 поступательной тяги может быть любой системой, известной в данной области техники, включая, но не в ограничительном смысле тянущий воздушный винт, воздушные винты, установленные сбоку, и т.д. В предпочтительном варианте, система 30 поступательной тяги включает в себя толкающий воздушный винт 32 с осью вращения Р воздушного винта, ориентированной, по существу, горизонтально и параллельно продольной оси L летательного аппарата, чтобы обеспечить тягу для высокоскоростного полета. Толкающий воздушный винт 32 может быть установлен внутри аэродинамического капота, установленного в задней части корпуса 14. Система 30 поступательной тяги предпочтительно приводится в действие тем же самым основным редуктором 26, который приводит в действие системы 16, 18 несущих винтов.
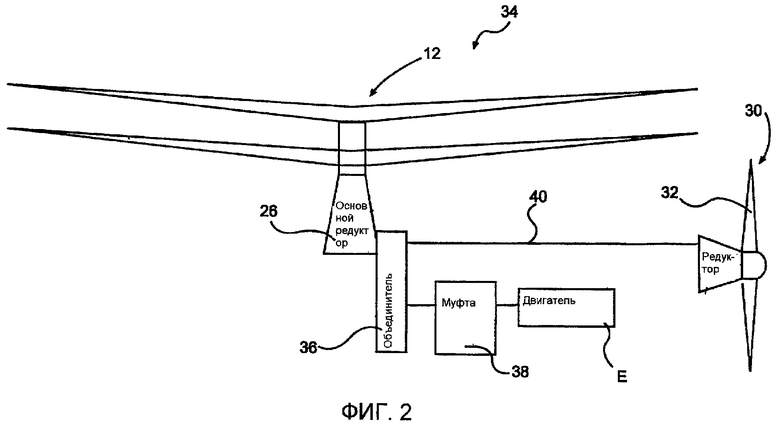
Обращаясь к Фиг.2, следует отметить, что здесь схематически изображена система 34 привода летательного аппарата 10. Как показано на чертеже, основной редуктор 26 механически соединен с системой 12 несущих винтов и с системой 30 поступательной тяги таким образом, что основной редуктор 26 осуществляет привод и системы 12 несущих винтов, и с системы 30 поступательной тяги. Система 34 привода может дополнительно включать в себя редуктор-объединитель 36, введенный в зацепление с основным редуктором 36. Как показано на чертеже, редуктор-объединитель 36 может приводиться в действие одним или несколькими двигателями Е. Двигатели Е приводят в действие редуктор-объединитель 36, а значит - и основной редуктор 26 посредством механизма расцепления, который предпочтительно представляет собой обгонную муфту 38. Система 30 поступательной тяги предпочтительно включает в себя ведущий вал 40, привод которого осуществляет редуктор-объединитель 36. Очевидным является, что хотя редуктор-объединитель 36 условно изображен как отдельный компонент, редуктор-объединитель 36 в альтернативном варианте может непосредственно входить в состав основного редуктора 26.
Эта компоновка привода позволяет управлять оборотами в минуту, развиваемыми системой 12 несущих винтов, таким образом, что наступающие стороны лопастей несущих винтов не достигают сверхзвуковых скоростей за счет разгрузки крутящего момента на систему 30 поступательной тяги. То есть, крутящий момент, развиваемый системой 12 несущих винтов в результате авторотации в режиме высокоскоростного полета, потребляется системой 30 поступательной тяги. Эта компоновка возможна потому, что системе 30 поступательной тяги в ходе высокоскоростного полета требуется гораздо больше мощности, чем вырабатывает система 12 несущих винтов, а система 12 несущих винтов выполнена с возможностью потребления меньшей мощности, выраженной в лошадиных силах, чем система 30 поступательной тяги. В соответствии с одной концепцией, разработанной заявителем, во время высокоскоростного полета система 12 несущих винтов потребляет примерно 400 лошадиных сил, а система 30 поступательной тяги потребляет приблизительно 1200 лошадиных сил. В соответствии с потреблением мощности, летательный аппарат 10 отличается от потребления мощности обычным вертолетом, в котором несущий винт является основным получателем мощности, выраженной в лошадиных силах, в случае отказа обоих двигателей, а рулевой винт, противодействующий возникновению крутящего момента, продолжает вращаться со скоростью, пропорциональной скорости несущего винта, чтобы поддержать управление рысканием во время авторотации. В данном случае большое потребление мощности происходит на системе 30 поступательной тяги, что обеспечивает способность замедлять систему 12 несущих винтов с помощью механической связи между этими двумя системами.
Разгрузка мощности с несущего винта на воздушный винт системы тяги уменьшает числа оборотов основных двигателей в минуту, а значит и обеспечивает (см. фиг.3) расположение отступающей лопасти с нулевым шагом при малой коллективной нагрузке и разных боковых циклических нагрузках, так что на отступающей стороне устраняется отрицательная подъемная сила, а на наступающей стороне уменьшается направленная вверх подъемная сила. Иными словами, в ходе режима высокоскоростного полета наступающие сектора диска создают уменьшенную положительную подъемную силу, а отступающие участки дисков вызывают малые изменения фазы или амплитуды положительной подъемной силы между системами 16, 18 верхнего и нижнего несущих винтов или вообще не вызывают их, тем самым минимизируя эти изменения, что минимизирует распространение вибрации на корпус. Минимизация вибрации позволяет работать на повышенных скоростях полета в течение увеличенных периодов времени по сравнению с обычными системами соосных несущих винтов противовращения.
Когда скорость полета летательного аппарата увеличивается или система 12 несущих винтов работает с превышением скорости из-за переходных условий маневрирования, дополнительная скорость несущих винтов будет поглощаться системой 30 поступательной тяги. То есть, система поступательной тяги работает, тормозя работающую на избыточной скорости систему 12 несущих винтов.
Как сказано выше, обгонная муфта 38 расположена в промежутке между одним или несколькими двигателями Е и редуктором-объединителем 36. Это важно, поскольку при отказе двигателей толкающий воздушный винт 32 системы 30 поступательной тяги должен быть установлен с нулевым шагом, в противном случае нагрузка, прикладываемая к системе 34 привода, будет замедлять систему 12 несущих винтов и предотвращать посадку в состоянии авторотации.
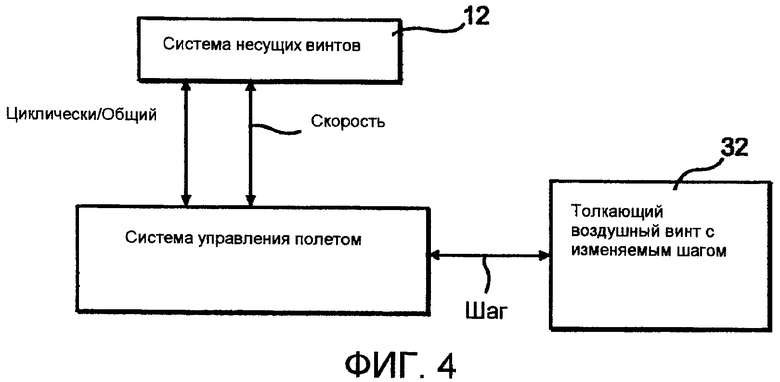
Толкающий воздушный винт 32 предпочтительно является воздушным винтом с изменяемым шагом и управляется системой управления полетом (схематически изображенной на Фиг.4), которая работает, регулируя шаг толкающего воздушного винта 32 и реагируя таким образом на заранее определенные ситуации, такие как отказ двигателей, а также реагируя на переходную избыточную скорость системы 12 несущих винтов. То есть, воздушный винт 32 с изменяемым шагом обеспечивает дополнительную точность воспроизведения разгрузки по крутящему моменту системы 12 несущих винтов, а также более точное управление скоростью системы 12 несущих винтов.
Очевидным является, что такие термины относительного положения, как «вперед», «назад», «верхний», «нижний», «над», «под», «внутренняя», «внешняя» и т.п. употребляются применительно к нормальному рабочему положению летательного аппарата в воздухе, и их не следует считать имеющими какой-то иной ограничительный характер.
Очевидным является, что хотя в проиллюстрированном варианте осуществления описана конкретная компоновка, другие компоновки также могут использовать преимущества настоящего изобретения.
Хотя проиллюстрированы, описаны и заявлены конкретные последовательности этапов, очевидным является, что эти этапы можно осуществлять в любом порядке, по отдельности или вместе, если не указано иное, и это по-прежнему будет обеспечивать осуществление настоящего изобретения.
Вышеизложенное описание является скорее вариантом, чем определяемым ограничениями, указанными в нем. В свете вышеуказанных положений возможны многочисленные модификации и изменения этого изобретения. Выше описаны предпочтительные варианты осуществления этого изобретения, однако для специалиста в данной области техники очевидным является то, что в рамках объема охраны этого изобретения возможны некоторые изменения. Поэтому очевидным является, что в рамках объема охраны прилагаемой формулы изобретения возможно осуществление этого изобретения не так, как указано в конкретном описании. По этой причине для того, чтобы определить истинные объем притязаний и содержание этого изобретения, следует использовать нижеследующую формулу изобретения.
Изобретение относится к области авиации, более конкретно, к системе приводов несущих винтов летательного аппарата. Система привода для высокоскоростного винтокрылого летательного аппарата содержит систему несущих винтов, основной редуктор для привода упомянутой системы несущих винтов, обгонную муфту и систему поступательной тяги. При этом система поступательной тяги приводится в действие основным редуктором, а обгонная муфта вводится в зацепление с основным редуктором таким образом, что крутящий момент, развиваемый системой несущих винтов в результате авторотации, поглощается системой поступательной тяги в ходе высокоскоростного полета, когда несущий винт находится в состоянии авторотации, и тем самым осуществляют разгрузку крутящего момента, развиваемого системой несущих винтов. Изобретение направлено на улучшение управления оборотами, развиваемыми системой несущих винтов, а также на уменьшение вибрации. 3 н. и 11 з.п. ф-лы, 5 ил.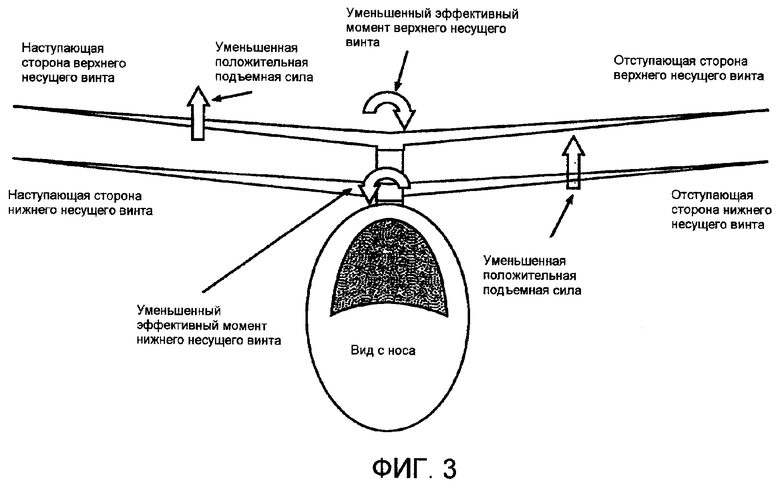
1. Система привода для высокоскоростного винтокрылого летательного аппарата, содержащая систему несущих винтов, основной редуктор для привода упомянутой системы несущих винтов, систему поступательной тяги, приводимую в действие упомянутым основным редуктором, и обгонную муфту, избирательно вводимую в зацепление с упомянутым основным редуктором таким образом, что крутящий момент, развиваемый системой несущих винтов в результате авторотации, поглощается системой поступательной тяги в ходе высокоскоростного полета, когда упомянутый несущий винт находится в состоянии авторотации.
2. Система привода по п.1, в которой упомянутая система несущих винтов включает в себя систему соосных несущих винтов противовращения.
3. Система привода по п.1, в которой упомянутая система поступательной тяги включает в себя толкающий воздушный винт.
4. Система привода по п.1, дополнительно содержащая редуктор-объединитель, введенный в зацепление с упомянутым основным редуктором и упомянутой системой поступательной тяги, причем упомянутый редуктор-объединитель приводится в действие через посредство обгонной муфты.
5. Система привода по п.1, в которой упомянутая система несущих винтов потребляет меньшую мощность, чем упомянутая система поступательной тяги, когда упомянутый несущий винт находится в состоянии авторотации.
6. Система привода для высокоскоростного винтокрылого летательного аппарата, содержащая основной редуктор, систему несущих винтов, приводимую в действие упомянутым основным редуктором, редуктор-объединитель, введенный в зацепление с упомянутым основным редуктором, и систему поступательной тяги, приводимую в действие упомянутым редуктором-объединителем, при этом упомянутая система несущих винтов получает меньшую мощность от упомянутого основного редуктора, чем упомянутая система поступательной тяги получает от упомянутого редуктора-объединителя во время высокоскоростного полета, когда упомянутый несущий винт находится в состоянии авторотации.
7. Система привода по п.6, в которой упомянутая система несущих винтов включает в себя систему соосных несущих винтов противовращения.
8. Система привода по п.6, дополнительно содержащая обгонную муфту, избирательно вводимую в зацепление с упомянутым редуктором-объединителем, причем упомянутая обгонная муфта совершает обгон, когда упомянутая система несущих винтов превышает скорость на заданную величину, так что крутящий момент, развиваемый упомянутой системой несущих винтов, поглощается упомянутой системой поступательной тяги через посредство упомянутого редуктора-объединителя.
9. Способ управления системой несущих винтов винтокрылого летательного аппарата, когда несущий винт находится в состоянии авторотации, заключающийся в том, что (1) осуществляют разгрузку крутящего момента, развиваемого системой несущих винтов, в систему поступательной тяги в ходе состояния авторотации.
10. Способ по п.9, в котором этап (1) дополнительно предусматривает разгрузку крутящего момента в ходе режима высокоскоростного полета, когда система несущих винтов находится в состоянии авторотации.
11. Способ по п.9, дополнительно предусматривающий этап, на котором (а) приводят в действие основной редуктор, который приводит в действие несущий винт через посредство обгонной муфты.
12. Способ по п.9, дополнительно предусматривающий этапы, на которых (б) приводят в действие основной редуктор через посредство редуктора-объединителя, а редуктор-объединитель приводят в действие с редуктора-объединителя, а редуктор-объединитель приводят в действие с помощью обгонной муфты, и (в) приводят в действие систему поступательной тяги через посредство редуктора-объединителя.
13. Способ по п.11, дополнительно предусматривающий этап, на котором располагают обгонную муфту в цепочке передачи движения непосредственно после двигателя.
14. Способ по п.9, дополнительно предусматривающий этапы, на которых (а) идентифицируют отказ двигателей, (б) устанавливают толкающий воздушный винт системы поступательной тяги на нулевой шаг.
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ЛИСТОВОГО СТЕКЛА | 1992 |
|
RU2041789C1 |
| US 6086016 А, 18.12.1984 | |||
| СИСТЕМА ДВУХ СООСНЫХ НЕСУЩИХ ВИНТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2155702C1 |
| US 5378301 A, 14.04.1998. | |||

