ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к устройству обработки проекционных значений, способу обработки проекционных значений и соответствующей компьютерной программе для обработки собранных проекционных значений. Дополнительно, изобретение относится к системе формирования изображения для формирования изображения интересующей области, содержащей устройство обработки проекционных значений.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Статья „Practical Aspects of Data-Driven Motion Correction Approach for Brain SPECT” IEEE Transaction on Medical Imaging, Volume 22, No. 6, pages 722 to 729 (2003) раскрывает способ для реконструкции скорректированных по движению ОФЭКТ изображений мозга. Алгоритм использует меру сходства для сравнения прямых проекций и собранных проекций, где коррекция артефактов движения выполняется так, что мера сходства минимизируется.
Например, в „Principles of Computerized Tomographic Imaging", Kak, Slaney, IEEE Press, 1999 раскрыто, что система компьютерной томографии содержит источник рентгеновского излучения для генерации рентгеновского излучения и детектор. Источник рентгеновского излучения и детектор вращаются вокруг интересующей области, в то время как рентгеновские лучи, генерируемые источником рентгеновского излучения, проходят через интересующую область и обнаруживаются детектором для сбора проекционных данных. Изображение интересующей области реконструируется с помощью алгоритма реконструкции, который, например, фильтрует и выполняет обратное проецирование собранных проекционных данных. Реконструированные изображения обычно демонстрируют артефакты изображения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Цель настоящего изобретения состоит в том, чтобы предоставить устройство обработки проекционных значений для обработки собранных проекционных значений, которое обеспечивает средство для улучшения качества изображения, которое реконструируют по собранным проекционным значениям. Дополнительной целью настоящего изобретения является обеспечение соответствующего способа обработки проекционных значений и компьютерной программы. Дополнительной целью настоящего изобретения является обеспечение соответствующей системы формирования изображения для формирования изображения интересующей области, которая содержит устройство обработки проекционных значений.
В первом аспекте настоящего изобретения обеспечено устройство обработки проекционных значений для обработки собранных проекционных значений, причем устройство обработки проекционных значений содержит:
- блок предоставления собранных проекционных значений для предоставления собранных проекционных значений,
- блок реконструкции для реконструкции первого изображения по рассматриваемым собранным проекционным значениям при реконструкционном допущении,
- блок определения смоделированных проекционных значений для определения смоделированных проекционных значений посредством моделирования проекции через рассматриваемое реконструированное первое изображение при реконструкционном допущении,
- блок определения расхождения для определения значений расхождения для собранных проекционных значений, где значение расхождения является указывающим степень расхождения соответствующего собранного проекционного значения с реконструкционным допущением, посредством сравнения собранных проекционных значений и смоделированных проекционных значений,
причем блок определения расхождения содержит блок определения разностей для определения разностей между собранными проекционными значениями и смоделированными проекционными значениями, так, что высокочастотная составляющая разностей подавляется больше, чем низкочастотная составляющая разностей, при этом блок определения расхождения адаптирован к определению значений расхождения для собранных проекционных значений на основе определяемых разностей.
Реконструкция изображения по собранным проекционным значениям является обратной задачей. Дана математическая модель, которая пытается прогнозировать собираемые проекционные значения. Эта модель может рассматриваться как прямая модель и может быть использована блоком определения смоделированных проекционных значений для определения смоделированных проекционных значений. Эта модель зависит от таких переменных, как значения вокселей в интересующей области, и постоянных, которые не модифицируются во время реконструкции. Для того чтобы реконструировать изображение, переменные реконструкции, такие как значения вокселей, определяются на основании собранных проекционных значений и посредством использования постоянных параметров реконструкции. Эти постоянные параметры реконструкции представляют собой реконструкционные допущения. Таким образом, реконструкция изображения по собранным проекционным значениям основана на переменных реконструкции и реконструкционных допущениях, где переменные реконструкции оптимизируются во время реконструкции, а все остальное, представляющее собой часть описанной выше модели, является реконструкционным допущением.
Например, если собранные проекционные значения были собраны устройством компьютерной томографии, то реконструкционным допущением является геометрия системы наблюдений. Другим реконструкционным предположением может быть подавление рассеяния в объекте, который должен быть реконструирован, отсутствие межпиксельных помех в детекторе, который был использован для сбора проекционных значений, коррекция вариаций интенсивности рентгеновского пучка, коррекция увеличения жесткости пучка и так далее, то есть, например, можно предположить, что вариации интенсивности рентгеновского излучения и/или увеличение жесткости пучка не представлены. Эти реконструкционные допущения приводят к модели, в которой собранные проекционные значения выражаются в виде линейных интегралов по объекту, который может быть охарактеризован с помощью моноэнергетического коэффициента поглощения. Дополнительное реконструкционное допущение может быть таким, что отсутствуют временные изменения объекта, который должен быть реконструирован во время сбора проекционных значений.
Если реконструкционные допущения недостаточно хороши, то есть, если они не соответствуют действительности, то реконструированное изображение не соответствует собранным проекционным значениям. Блок определения расхождения предназначен для определения значений расхождения, которые являются указывающими степень этого расхождения между собранными проекционными значениями и реконструкционными допущениями. Эти величины расхождения могут быть использованы для улучшения качества реконструирования изображения по собранным проекционным значениям. Например, реконструкционные допущения могут быть модифицированы и значения расхождения могут быть определены снова по отношению к модифицированным реконструкционным допущениям. Если значения расхождения меньше, по отношению к модифицированному реконструкционному допущению, то модифицированное реконструкционное допущение может быть использовано для реконструирования изображения по собранным проекционным значениям для уменьшения артефактов в реконструированном изображении, вызванных расхождениями между собранными проекционными значениями и реконструкционными допущениями. Таким образом, посредством определения значений расхождения предоставлены средства для улучшения качества изображения, которое реконструируется на основе собранных проекционных значений.
Собранные проекционные значения являются преимущественно проекционными значениями системы формирования изображения компьютерной томографии или рентгеновской системы с рамой C-типа. Собранные проекционные значения также могут быть проекционными значениями, собранными посредством других модальностей формирования изображения, например, таких как система радионуклидного формирования изображения, например, система формирования изображения позитрон-эмиссионной томографии или система формирования изображения однофотонной эмиссионной компьютерной томографии.
Блок предоставления собранных проекционных значений предпочтительно является блоком хранения, в котором собранные проекционные значения хранятся, или блоком получения собранных проекционных значений для получения собранных проекционных значений по беспроводному или проводному информационному соединению и для предоставления полученных собранных проекционных значений. Если блок предоставления собранных проекционных значений является блоком хранения или блоком получения собранных проекционных значений, то устройство обработки проекционных значений предпочтительно содержит компьютерную систему, включающую в себя по меньшей мере блок реконструкции, блок определения смоделированных проекционных значений, блок определения расхождения и блок предоставления собранных проекционных значений.
Как уже указано выше реконструкционным допущением может быть геометрия системы наблюдений. Геометрия системы наблюдений определяется, например, углом проекции, под которым собраны проекционные значения, интенсивностью излучения, используемого для генерации проекционных значений, степенью расходимости излучения, используемого для генерации проекционных значений, причем степень расходимости может быть параметризована углом конусности и углом веерного пучка, и так далее.
Блок реконструкции предпочтительно адаптирован для того, чтобы выполнять обратное проецирование с фильтрацией для реконструкции первого изображения объекта.
Блок определения смоделированных проекционных значений предпочтительно адаптирован для того, чтобы моделировать прямую проекцию через рассматриваемое реконструированное первое изображение при реконструкционных допущениях для определения смоделированных проекционных значений в соответствии с реконструкционными допущениями.
Предпочтительно, для каждого собранного проекционного значения определяется смоделированное проекционное значение, и для каждого собранного проекционного значения, то есть для каждой пары собранного проекционного значения и соответствующего смоделированного проекционного значения, определяется величина расхождения.
Блок определения расхождения содержит блок определения разностей для определения разностей между собранными проекционными значениями и смоделированными проекционными значениями, где блок определения расхождения адаптирован для того, чтобы определять значения расхождения для собранных проекционных значений на основе определяемых разностей.
Блок определения разностей адаптирован для того, чтобы определять разности так, чтобы высокочастотная составляющая этих разностей подавлялась больше, чем низкочастотная составляющая разностей. Предпочтительно, чтобы высокочастотная составляющая подавлялась больше, чем низкочастотная составляющая посредством подавления высокочастотной составляющей, а не низкочастотной составляющей.
Для того чтобы позволить блоку реконструкции реконструировать изображение, все величины, которые используются соответствующим алгоритмом реконструкции, должны быть обеспечены как дискретные значения, то есть, все величины представлены конечным набором чисел. Такое использование дискретных значений приводит к эффекту дискретизации, то есть даже если расхождение будет равно нулю, собранные проекционные значения и рассматриваемые смоделированные проекционные значения, которые моделируются при реконструкционном допущении, будут различаться из-за ошибок дискретизации. Эти ошибки дискретизации нежелательно влияют на значения расхождения на высоких пространственных частотах, то есть на пространственных частотах выше, чем пространственные частоты, содержащие структурную информацию в интересующей области, изображение которой должно быть сформировано. Определение разностей так, что низкочастотная составляющая разности больше выражена, чем высокочастотная составляющая, таким образом, может подавить ошибки дискретизации в определяемых разностях и, следовательно, в определяемых значениях расхождения. Это улучшает качество значений расхождения.
Термины «низкочастотная составляющая» и «высокочастотная составляющая» относятся к пространственным частотам.
Разности между собранными проекционными значениями и смоделированными проекционными значениями обычно содержат некоторый диапазон пространственных частот, в частности, они содержат низкочастотные составляющие, имеющие пространственные частоты ниже, чем пространственные частоты высокочастотных составляющих. Блок определения расхождения предпочтительно адаптирован для того, чтобы определять разности так, что высокочастотная составляющая подавляется, то есть определять разности так, что частотная составляющая, имеющая пространственную частоту выше, чем другие частотные составляющие разностей, подавляется.
Диапазон частот, в котором присутствуют ошибки дискретизации, зависит от дискретизации, используемой при реконструировании изображения и моделировании проекции для определения смоделированных проекционных значений. Поскольку используемая здесь дискретизация известна, может быть определен диапазон частот ошибок дискретизация. Блок определения расхождения предпочтительно адаптирован для того, чтобы определять разности так, что подавляются высокочастотные составляющие, то есть частотные составляющие в определенном диапазоне частот, который связан с ошибками дискретизации.
Кроме того, предпочтительно, чтобы блок определения разностей был адаптирован к низкочастотной фильтрации собранных проекционных значений и к определению разностей посредством вычитания друг из друга соответствующего собранного проекционного значения, прошедшего низкочастотную фильтрацию, и смоделированного проекционного значения, соответствующего соответствующему собранному проекционному значению.
Эффекты дискретизации приводят к потере высокочастотных составляющих в смоделированных проекционных значениях. Таким образом, если вычесть друг из друга собранные проекционные значения и смоделированные проекционные значения, результат вычитания покажет ошибки дискретизации в высокочастотных составляющих. Если перед вычитанием друг из друга собранных проекционных значений и смоделированных проекционных значений также подавляются высокочастотные составляющие в собранных проекционных значениях, результат вычитания содержит меньше ошибок дискретизации в высокочастотных составляющих. Это повышает качество значений расхождения, определяемых на основе результата вычитания.
Кроме того, предпочтительно, чтобы блок определения разностей был адаптирован для того, чтобы определять разности посредством вычитания друг из друга соответствующего собранного проекционного значения и смоделированного проекционного значения, соответствующего соответствующему собранному проекционному значению, для генерации результатов вычитания и низкочастотной фильтрации результатов вычитания.
Поскольку разности определяются как результаты вычитания, прошедшие низкочастотную фильтрацию, высокочастотные составляющие, которые вызваны ошибками дискретизации, подавляются или устраняются низкочастотной фильтрацией. Это также улучшает качество значений расхождения.
Кроме того, предпочтительно, чтобы блок определения разностей был адаптирован для того, чтобы определять разности посредством вычитания друг из друга соответствующего собранного проекционного значения и смоделированного проекционного значения, соответствующего соответствующему собранному проекционному значению, для генерации результатов вычитания, посредством реконструкции изображения вычитания из результатов вычитания, определяемых для собранных проекционных значений, и посредством моделирования проекции через реконструированное изображение вычитания.
Дискретизация во время реконструкции изображения и моделирование проекции для определения смоделированных проекционных значений приводит к подавлению высокочастотных составляющих. Таким образом, если результаты вычитания используются для реконструирования изображения вычитания и если моделируется проекция через реконструированное изображение вычитания, результатами моделирования являются результаты вычитания, в которых высокочастотные составляющие подавляются, в частности удаляются, тем самым подавляя, в частности удаляя, ошибки дискретизации в значениях расхождения, которые определяются на основе результатов вычитания. Кроме того, ошибки дискретизации были сгенерированы процессом реконструкции первого изображения и определение проекционных значений посредством моделирования проекции через реконструированное первое изображение, где подавление высокочастотных составляющих, то есть подавление ошибок дискретизации, осуществляется тем же самым процессом. Следовательно, подавление высокочастотных составляющих очень хорошо адаптировано к ошибкам дискретизации в высокочастотных составляющих результатов вычитания. Это дополнительно улучшает качество значений расхождения.
Кроме того, предпочтительно, что блок определения расхождения дополнительно содержит блок взвешивания шума для определения значения шума для собранного проекционного значения и для взвешивания определенной разности с обратным значением определяемого значения шума, где блок определения расхождения адаптирован для того, чтобы определять значение расхождения для собранного проекционного значения на основе этой взвешенной разности.
Посредством взвешивания определяемых разностей с обратными значениями шума, разности нормализуются по отношению к значениям шума. Это дополнительно улучшает качество значений расхождения, в частности, сопоставимость значений расхождения, принадлежащих к различным собранным проекционным значениям.
Кроме того, предпочтительно, чтобы блок определения расхождения был адаптирован для того, чтобы возводить в квадрат взвешенную разность и определять значение расхождения на основе возведенной в квадрат взвешенной разности.
Кроме того, предпочтительно, чтобы собранные проекционные значения были назначены моментам времени сбора, причем устройство обработки проекционных значений дополнительно содержит блок определения сигнала временного расхождения для определения сигнала временного расхождения, указывающего на расхождение между собранным проекционным значением и реконструкционным допущением в различные моменты времени, посредством назначения моментов времени сбора значениям расхождения, определяемым для собранных проекционных значений соответствующего момента времени сбора.
Если блок реконструкции адаптирован для того, чтобы рассматривать стационарный объект как реконструкционное допущение и если объект двигается, сигнал временного расхождения можно рассматривать как сигнал временного движения, указывающий на движение объекта.
Предпочтительно, блок определения сигнала временного расхождения адаптирован для усреднения значений расхождения, принадлежащих к одному моменту времени сбора данных, чтобы генерировать одномерный сигнал временного расхождения.
Кроме того, предпочтительно, что блок реконструкции адаптирован для того, чтобы реконструировать второе изображение на основе собранных проекционных значений и определяемого сигнала временного расхождения. Это позволяет реконструировать второе изображение, имеющее уменьшенные артефакты изображения, вызванные расхождениями между собранными проекционными значениями и реконструкционным допущением.
Например, блок реконструкции может быть адаптирован для того, чтобы реконструировать изображение на основе только собранных проекционных значений, которые были собраны в момент времени, в который сигнал временного расхождения показывает расхождение ниже порогового значения. Блок реконструкции может также быть адаптирован для того, чтобы использовать собранные проекционные значения для реконструкции второго изображения, которые были собраны в моменты времени, в которые сигнал временного расхождения показывает расхождение в рамках заранее заданного диапазона расхождения. Это позволяет реконструировать изображение на основе собранных проекционных значений, имеющих аналогичное расхождение.
Кроме того, предпочтительно, что устройство обработки проекционных значений дополнительно содержит блок определения изображения расхождения для генерации изображения расхождения, где для элемента изображения из изображения расхождения добавляются значения расхождения, которые вносят вклад в соответствующий элемент изображения. Значения расхождения, которые используются для генерации изображения расхождения, являются предпочтительно разностями, которые были определены посредством вычитания друг из друга собранных проекционных значений и смоделированных проекционных значений, где разности определяются так, что высокочастотная составляющая подавляется, в частности, удаляется из результатов вычитания.
Такое изображение расхождения может, например, быть использовано специалистом в области лучевой диагностики для индикации того, какие части реконструированного изображения не должны использоваться для диагностических целей.
Суммирование значений расхождения, которые вносят вклад в соответствующий элемент изображения расхождения, выполняется предпочтительно посредством обратного проецирования без фильтрации.
В примерном варианте осуществления, для определения подходящего фильтра нижних частот для фильтрации собранных проекционных данных или значений расхождения, может использоваться изображение расхождения, показывающее структуры, которые, как известно, вызваны ошибками дискретизации. Такое изображение расхождения может быть определено посредством моделирования. В этом примерном варианте осуществления может быть выбран такой фильтр нижних частот, что структуры, которые, как известно, вызваны ошибками дискретизации, уменьшаются.
Значение расхождения вносит вклад в некоторый элемент изображения, если собранное проекционное значение, для которого было определено соответствующее значение расхождения, вызвано прохождением луча через положение внутри объекта, представленного некоторым элементом изображения.
Кроме того, предпочтительно, что блок реконструкции адаптирован для того, чтобы реконструировать второе изображение объекта на основе собранных проекционных значений и определяемого изображения расхождения для уменьшения артефактов изображения, вызванных расхождениями между собранными проекционными значениями и реконструкционным допущением.
Кроме того, предпочтительно, что устройство обработки проекционных значений дополнительно содержит блок наложения для наложения реконструированного первого изображения и изображения расхождения.
Это позволяет непосредственно показать пользователю, на какие части первого изображения влияют артефакты изображения, вызванные расхождениями собранных проекционных значений. Изображение расхождения также может быть использовано для наложения поверх других изображений, таких как указанное второе изображение.
Кроме того, предпочтительно, что блок реконструкции адаптирован для того, чтобы реконструировать второе изображение объекта по собранным проекционным значениям и определяемым значениям расхождения для уменьшения артефактов изображения, вызванных расхождениями между собранными проекционными значениями и реконструкционным допущением.
Например, реконструкционное допущение может быть модифицировано так, что определяемые значения расхождения уменьшаются, в частности, минимизируются, где финальное изображение реконструируется по рассматриваемым собранным проекционным значениям при модифицированном реконструкционном допущении. Это улучшает качество реконструированного финального изображения.
Кроме того, предпочтительно, что блок реконструкции адаптирован для того, чтобы определять собранные проекционные значения, имеющие значение расхождения ниже заранее заданного порогового значения и использовать только определяемые собранные проекционные значения, имеющие значение расхождения ниже заранее заданного порогового значения при реконструкции второго изображения.
Так как собранные проекционные значения, показывающие большое расхождение, не используются для реконструкции изображения, качество реконструированного изображения может быть улучшено.
Кроме того, предпочтительно, что блок реконструкции адаптирован для того, чтобы определять собранные проекционные значения, имеющие схожие значения расхождения, и реконструировать изображение объекта по собранным проекционным значениям, имеющим схожие значения расхождения.
Схожие значения расхождения могут указывать схожие состояния объекта. Таким образом, посредством реконструкции изображения объекта по собранным проекционным значениям, имеющим схожие значения расхождения, может быть реконструировано изображение объекта, которое соответствует некоторому состоянию объекта. Например, если реконструкционное допущение таково, что объект не движется, схожие значение расхождения могут указывать схожие состояния движения. В этом случае, реконструируя изображение объекта по собранным проекционным значениям, имеющим схожие значения расхождения, может быть реконструировано изображение объекта в некотором состоянии движения.
В дополнительном аспекте настоящего изобретения представлена система формирования изображения для формирования изображения интересующей области, причем система формирования изображения содержит:
- блок сбора проекционных значений для сбора проекционных значений интересующей области, и
- устройство обработки проекционных значений для обработки собранных проекционных значений как определено в п.1.
В дополнительном аспекте настоящего изобретения предоставлен способ обработки собранных проекционных значений, причем способ обработки собранных проекционных значений содержит следующие этапы, на которых:
- предоставляют собранные проекционные значения,
- реконструируют первое изображение по рассматриваемым собранным проекционным значениям при реконструкционном допущении,
- определяют смоделированные проекционные значения посредством моделирования проекции через рассматриваемое реконструированное первое изображение при реконструкционном допущении,
- определяют значения расхождения для собранных проекционных значений, где значение расхождения является указывающим степень расхождения соответствующего собранного проекционного значения с реконструкционным допущением, посредством сравнения собранных проекционных значений и смоделированных проекционных значений,
причем разности между собранными проекционными значениями и смоделированными проекционными значениями определяются так, что высокочастотная составляющая разностей подавляется больше, чем низкочастотная составляющая, и где значения расхождения для собранных проекционных значений определяются на основе определяемых разностей.
В дополнительном аспекте настоящего изобретения предоставлен способ формирования изображения для формирования изображения интересующей области, причем способ формирования изображения содержит следующие этапы, на которых:
- собирают проекционные значения интересующей области, и
- обрабатывают собранные проекционные значения по п.14.
В еще одном аспекте настоящего изобретения обеспечена компьютерная программа для обработки собранных проекционных значений, причем компьютерная программа содержит средства программного кода для побуждения устройства обработки проекционных значений по п.1 выполнять этапы способа обработки проекционных значений по п.12, когда компьютерную программу запускают на компьютере, управляющем устройством обработки проекционных значений.
В еще одном аспекте настоящего изобретения обеспечена компьютерная программа для формирования изображения интересующей области, причем компьютерная программа содержит средства программного кода для побуждения системы формирования изображения по п.11 выполнять этапы способа формирования изображения по п.13, когда компьютерную программу запускают на компьютере, управляющем системой формирования изображения.
Нужно понимать, что устройство обработки проекционных значений по п.1, система формирования изображения по п.11, способ обработки проекционных значений по п.12, способ формирования изображения по п.13, компьютерная программа для сбора собранных проекционных значений по п.14 и компьютерная программа для формирования изображения интересующей области по п.15 имеют схожие и/или одинаковые предпочтительные варианты осуществления, как определено в зависимых пунктах формулы изобретения.
Нужно понимать, что предпочтительные варианты осуществления изобретения также могут представлять собой любые комбинации зависимых пунктов формулы изобретения с соответствующим независимым пунктом формулы изобретения.
Эти и другие аспекты настоящего изобретения будут очевидны и прояснены со ссылкой на описанные ниже варианты.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На следующих чертежах:
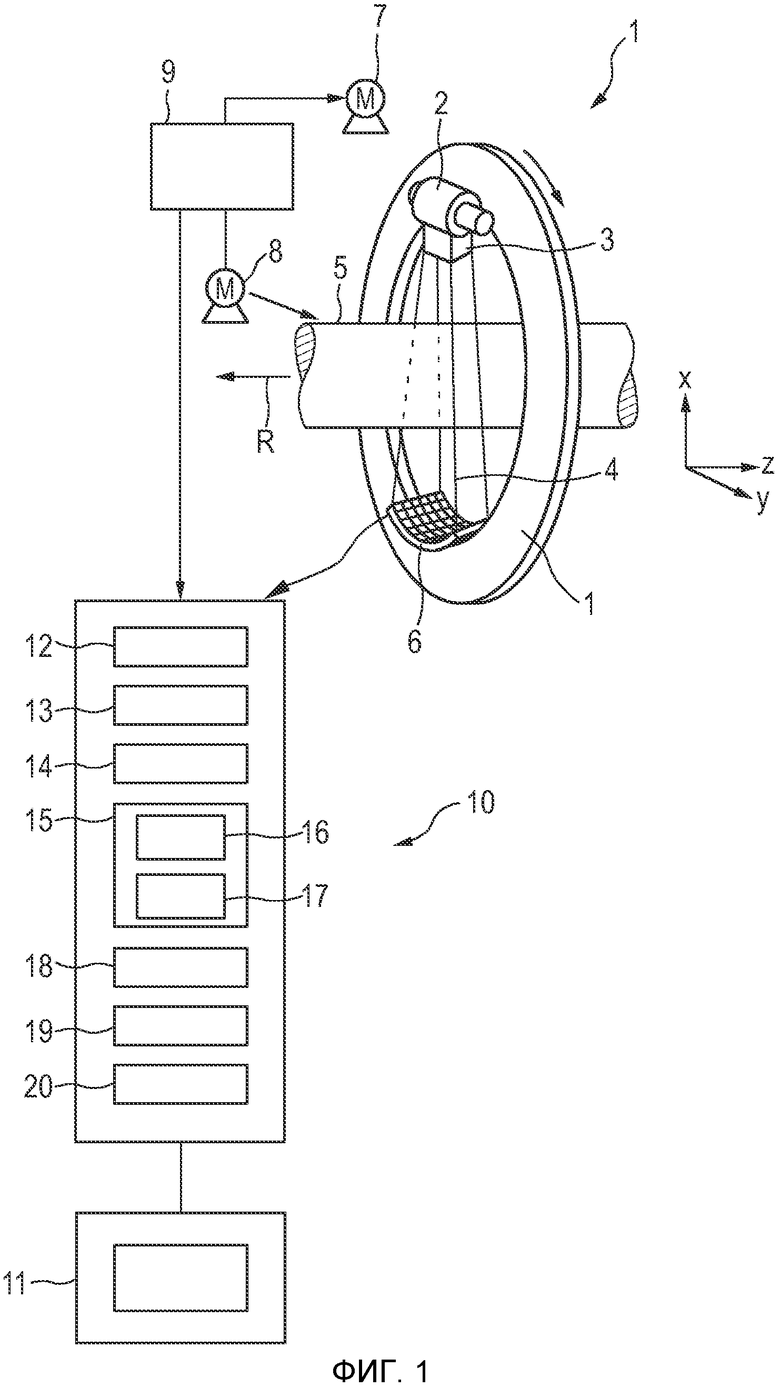
На фиг.1 схематично и примерно представлена система формирования изображения для формирования изображения интересующей области, содержащая устройство обработки проекционных значений,
На фиг.2 представлена блок-схема последовательности операций, примерно иллюстрирующая способ формирования изображения для формирования изображения интересующей области,
На фиг.3 схематично и примерно представлена синограмма собранных проекционных значений,
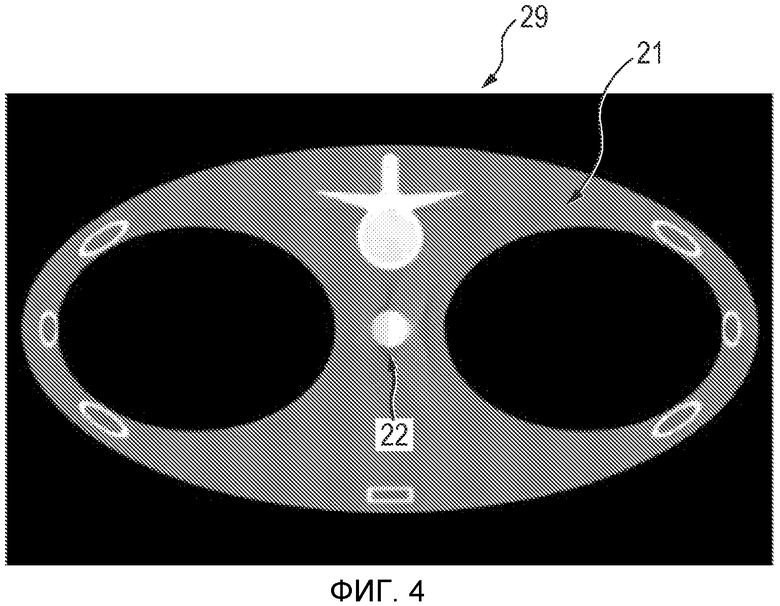
На фиг.4 схематично и примерно представлено реконструированное первое изображение, которое было реконструировано с использованием собранных проекционных значений,
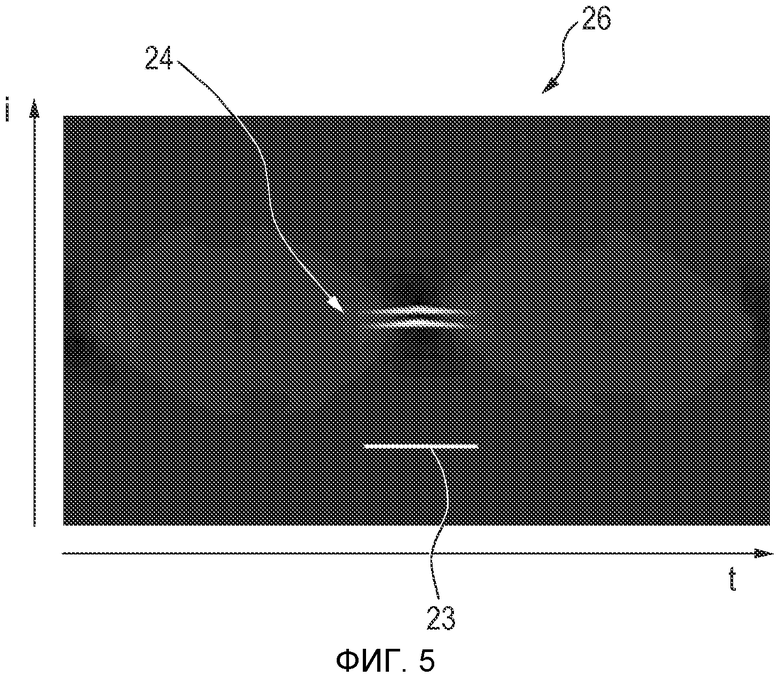
На фиг.5 схематично и примерно представлены значения расхождения, формирующие синограмму расхождения,
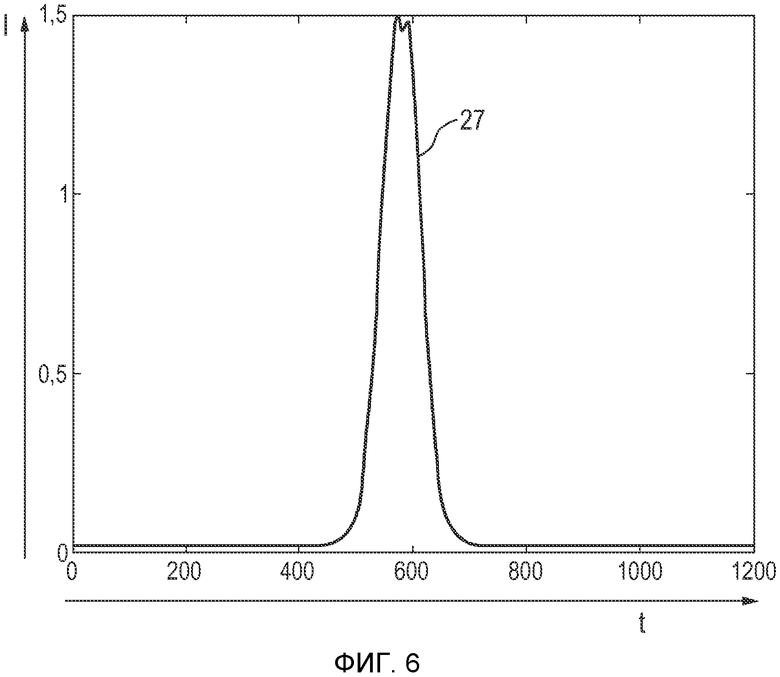
На фиг.6 схематично и примерно представлен сигнал временного расхождения, являющийся сигналом движения, и
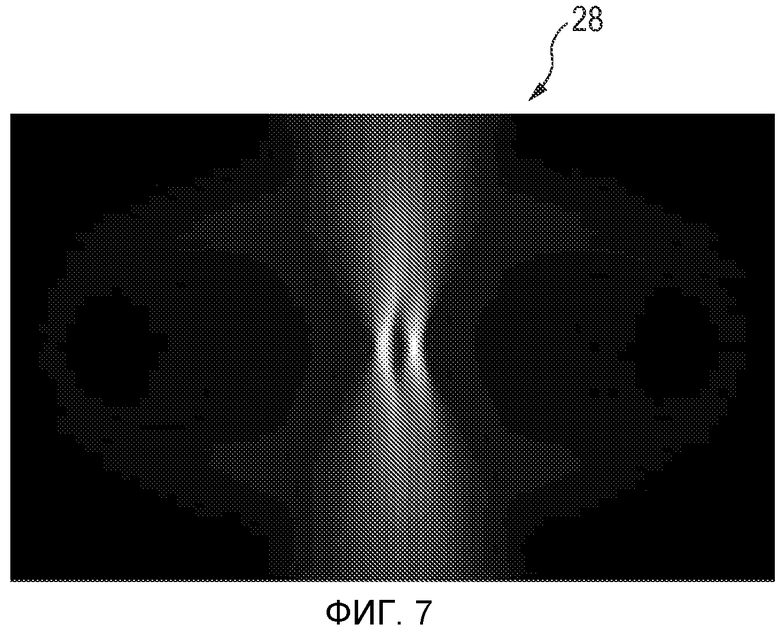
На фиг.7 схематично и примерно представлено изображение расхождения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
На фиг.1 схематично и примерно представлена система формирования изображения для формирования изображения интересующей области, являющаяся системой компьютерной томографии. Система компьютерной томографии включает в себя гентри 1, который способен вращаться вокруг оси R вращения, которая проходит параллельно направлению z. Источник 2 излучения, который, в этом варианте осуществления, является рентгеновской трубкой, установлен на гентри 1. Источник 2 излучения обеспечен коллиматором 3, который формирует, в этом варианте осуществления, конический пучок 4 излучения из излучения, генерируемого источником 2 излучения. Излучение проходит объект (не показано), такой как пациент, и интересующую область, которая предпочтительно расположена внутри объекта, в исследуемой зоне, которая, в этом варианте осуществления, является цилиндрической. После прохождения исследуемой зоны 5 пучок 4 излучения падает на детекторное устройство 6, которое содержит двумерную детекторную поверхность. Детекторное устройство 6 установлено на гентри 1.
Система компьютерной томографии содержит два двигателя 7, 8. Гентри 1 приводится в движение предпочтительно с постоянной, но регулируемой угловой скоростью посредством двигателя 7. Двигатель 8 предназначен для перемещения объекта, например, пациента, который расположен на столе пациента в исследуемой зоне 5, параллельно направлению оси R вращения или оси z. Эти двигатели 7, 8 управляются посредством блока 9 управления, например, так, что источник излучения и исследуемая зона 5 и, таким образом, интересующая область в исследуемой зоне перемещаются относительно друг друга по спиральной траектории. Однако, также возможно, что объект или исследуемая зона 5 не перемещаются, но вращается только источник 2 излучения, то есть источник излучения движется по круговой траектории по отношению к объекту или исследуемой зоне 5. Кроме того, в другом варианте осуществления, коллиматор 3 может быть адаптирован для формирования другой формы пучка, в частности, веерного пучка, и детекторное устройство 6 может содержать детекторную поверхность, которая сформирована в соответствии с другой формой пучка, в частности веерного пучка.
Во время относительного движения источника излучения и исследуемой зоны 5 детекторное устройство 6 собирает проекционные значения, зависящие от излучения, падающего на детекторную поверхность детекторного устройства 6. Таким образом, источник 2 излучения, элементы для перемещения источника 2 излучения относительно исследуемой зоны, в частности, двигатели 7, 8 и гентри 1, и детекторное устройство 6 формируют блок сбора проекционных значений для генерации собранных проекционных значений интересующей области.
Собранные проекционные значения предоставляются в устройство 1 обработки проекционных значений для обработки собранных проекционных значений. Устройство 1 обработки проекционных значений содержит приемный блок 12 для приема собранных проекционных значений и для предоставления собранных проекционных значений в блок 13 реконструкции. Интересующая область находится в исследуемой зоне и содержит объект или часть объекта. Блок реконструкции реконструирует первое изображение объекта по рассматриваемым собранным проекционным значениям при реконструкционном допущении. В этом варианте осуществления блок 13 реконструкции адаптирован для реконструкции первого изображения с использованием обратного проецирования с фильтрацией. Реконструкционные допущения представляют собой, например, сбор данных по круговой траектории источника с веерным пучком и центрально-фокусным детектором, подавление рассеянного излучения отсеивающими решетками, коррекцию изменений интенсивности рентгеновского пучка, и отсутствие эффекта увеличения жесткости пучка. Это означает, что измеренные проекционные значения могут быть смоделированы в виде линейных интегралов по объекту, который может быть описан с помощью моноэнергетических коэффициентов рентгеновского поглощения.
Дальнейшие возможные допущения таковы: объект полностью находится внутри реконструируемого поля обзора, объект не движется во время сбора данных, интенсивность рентгеновского излучения достаточно высока, так что статистические характеристики шума могут быть хорошо аппроксимированы распределением по Гауссу.
Двумерное обратное проецирование с фильтрацией представляет собой подходящий алгоритм реконструкции для этих допущений.
Кроме того, устройство 10 обработки проекционных значений содержит блок 14 определения смоделированных проекционных значений для определения смоделированных проекционных значений посредством моделирования проекции через рассматриваемое реконструируемое первое изображение при реконструкционных допущениях. В этом варианте осуществления, блок определения смоделированных проекционных значений адаптирован для моделирования прямой проекции через рассматриваемое реконструируемое первое изображение при реконструкционных допущениях. Для каждого собранного проекционного значения определяется смоделированное проекционное значение.
Устройство 10 обработки проекционных значений дополнительно содержит блок 15 определения расхождения для определения значений расхождения для собранных проекционных значений, где значение расхождения является указывающим степень расхождения соответствующего собранного проекционного значения с реконструкционными допущениями, посредством сравнения собранных проекционных значений и смоделированных проекционных значений. Для каждой пары из собранного проекционного значения и соответствующего смоделированного проекционного значения определяется величина расхождения.
Блок 15 определения расхождения содержит блок 16 определения разностей для определения разностей между собранными проекционными значениями и смоделированными проекционными значениями, причем блок 15 определения расхождения адаптирован для определения значений расхождения для собранных проекционных значений на основе разностей между собранными проекционными значениями и смоделированными проекционными значениями. Кроме того, блок 16 определения разностей адаптирован для определения разностей так, что высокочастотные составляющие подавляются. Для того чтобы подавить высокочастотные составляющие, в этом варианте осуществления, блок 16 определения разностей адаптирован к низкочастотной фильтрации собранных проекционных значений и к определению разностей посредством вычитания друг из друга соответственного собранного проекционного значения, прошедшего низкочастотную фильтрацию, и соответствующего смоделированного проекционного значения. В других вариантах осуществления, блок определения разностей может быть адаптирован для определения разностей посредством вычитания друг из друга соответственного собранного проекционного значения и соответствующего смоделированного проекционного значения для генерации результатов вычитания и низкочастотной фильтрации результатов вычитания. Возможно также, что блок определения разностей адаптирован для определения разностей посредством вычитания друг из друга соответственного собранного проекционного значения и соответствующего смоделированного проекционного значения для генерации результатов вычитания, посредством реконструкции изображения вычитания по результатам вычитания, определяемым для собранных проекционных значений, и посредством моделирования проекции через реконструированное изображение вычитания.
Блок 15 определения расхождения содержит блок 17 взвешивания шума для определения значения шума для собранного проекционного значения и для взвешивания определяемой разности с обратным значением определяемого значения шума. Блок 17 взвешивания шума адаптирован для взвешивания всех разностей, которые определены для собранных проекционных значений, посредством обратных значений шума соответственных собранных проекционных значений.
Взвешивание шума предпочтительно определяется по обнаруженной интенсивности пикселя детектора на основе калибровочных данных. Это означает, что при использовании эталонного источника рентгеновского излучения и повторных измерений шумовые характеристики для данной системы определяются экспериментально в диапазоне интенсивности рентгеновского излучения.
Блок 15 определения расхождения дополнительно адаптирован к возведению в квадрат взвешенных разностей и определению значений расхождения как возведенных в квадрат взвешенных разностей. Таким образом, для каждого собранного проекционного значения, возведенная в квадрат взвешенная разность определяется как значение расхождения. В других вариантах осуществления могут быть опущены операция возведения в квадрат и необязательно также операция взвешивания. Это означает, что блок 15 определения расхождения может быть адаптирован для того, чтобы определять определяемые разности с подавленными высокочастотными составляющими как значения расхождения или для определения взвешенных разностей с подавленными высокочастотными составляющими как значения расхождения или для определения возведенных в квадрат разностей с подавленными высокочастотными составляющими как значения расхождения.
Собранным проекционным значениям назначаются моменты времени сбора. Устройство 10 обработки проекционных значений содержат блок 18 определения сигнала временного расхождения для определения сигнала временного расхождения, указывающего на расхождение между собранным проекционным значением и реконструкционным допущением в разные моменты времени, посредством назначения моментов времени сбора значениям расхождения, определяемым для собранных проекционных значений соответственного момента временем сбора. В этом варианте осуществления блок 18 определения сигнала временного расхождения адаптирован для усреднения значений расхождения, принадлежащих одному и тому же моменту времени, чтобы генерировать одномерный сигнал временного расхождения. Если реконструкционное допущение таково, что объект в зоне исследования не движется, и если объект движется, сигнал временного расхождения может рассматриваться как временной сигнал движения, указывающий движение объекта. Таким образом, значения расхождения могут использоваться для определения движения объекта.
Блок 13 реконструкции может быть адаптирован для реконструкции второго изображения на основе собранных проекционных значений и определяемого сигнала временного расхождения. Это позволяет реконструировать второе изображение, имеющее уменьшенные артефакты изображения, вызванные расхождениями между собранными проекционными значениями и реконструкционными допущениями. В этом варианте осуществления реконструкционное допущение, которое, по существу, влияет на значения расхождения, заключается в том, что объект в интересующей области не движется. Поэтому блок реконструкции адаптирован к использованию собранных проекционных значений для реконструкции второго изображения, которые были собраны в моменты времени, в которые сигнал временного расхождения показывал расхождение в заранее заданном диапазоне расхождения, в частности, в котором сигнал временного расхождения показывал схожее расхождение. Поскольку в этом варианте осуществления значения расхождения в основном находятся под влиянием движений объекта, которые не согласуются с реконструкционным допущением неподвижного объекта, схожие значения расхождения указывают схожие состояния движения объекта. Поэтому блок реконструкции адаптирован для реконструкции изображения на основе собранных проекционных значений, которые соответствуют схожему состоянию движения объекта, который должен быть реконструирован.
Блок 13 реконструкции также может быть адаптирован к реконструкции второго изображения только на основе собранных проекционных значений, которые были собраны в момент времени, в который сигнал временного расхождения показывает расхождение ниже порогового значения. Это гарантирует, что большие расхождения, то есть значения расхождения выше порогового значения, имеют пониженное влияние на качество изображения, тем самым, улучшая качество второго изображения.
Блок 13 реконструкции также может быть адаптирован для реконструкции второго изображения объекта по собранным проекционным значениям и определяемым значениям расхождения для уменьшения артефактов изображения, вызванных расхождениями между собранными проекционными значениями и реконструкционными допущениями, без использования сигнала временного расхождения. Например, первое изображение может быть реконструировано снова с модифицированными реконструкционными допущениями на основе тех же самых собранных проекционных значений. Эта модификация реконструкционных допущений может быть выполнена таким образом, чтобы определяемые значения расхождения уменьшались, в частности, минимизировались, причем финальное изображение реконструируется по рассматриваемым собранным проекционным значениям при модифицированных реконструкционных допущениях. Таким образом, реконструкционные допущения можно модифицировать до тех пор, пока значения расхождения не будут минимизированы и эти модифицированные реконструкционные допущения не смогут быть использованы для реконструирования изображения по собранным проекционным значениям, которые имеет улучшенное качество изображения.
Например, модифицированные реконструкционные допущения могут включать в себя коррекцию увеличения жесткости пучка, то есть предполагается, что имеет место увеличение жесткости пучка, а алгоритм реконструкции содержит соответствующую коррекцию увеличения жесткости пучка. Другое возможное модифицированное реконструкционное допущение может быть таким, что объект движется, при сборе первой части проекционных значений, и что объект не движется, при сборе второй части проекционных значений. Алгоритм реконструкции, рассматривающий это модифицированное реконструкционное допущение, затем использует предпочтительно только вторую часть собранных проекционных значений для реконструирования изображения объекта.
Аналогично описанному выше использованию сигнала временного расхождения, блок 13 реконструкции также может быть адаптирован для определения собранных проекционных значений, имеющих значение расхождения ниже заранее заданного порогового значения, и для использования при реконструкции второго изображения только собранных проекционных значений, имеющих значение расхождения ниже заранее заданного порогового значения. Кроме того, так же как и в описанном выше использовании сигнала временного расхождения, блок 13 реконструкции может быть адаптирован для определения собранных проекционных значений, имеющих схожие значения расхождения, и для реконструкции изображения объекта по этим собранным проекционным значениям, имеющим схожие значения расхождения.
Устройство 10 обработки проекционных значений дополнительно содержит блок 19 определения изображения расхождения для генерации расхождения изображения, где для элемента изображения из изображения расхождения добавляются значения расхождения, которые вносят вклад в соответственный элемент изображения. Эта генерация изображения расхождения осуществляется предпочтительно посредством обратного проецирования без фильтрации. Это обратное проецирование без фильтрации предпочтительно использует реконструкционные допущения, которые использовались блоком 13 реконструкции для реконструкции первого изображения.
Блок 19 определения изображения расхождения может быть адаптирован для генерации изображения расхождения на основе значений расхождения, являющихся результатами вычитания с уменьшенными высокочастотными составляющими, или на основе значений расхождения, являющихся взвешенными по шуму результатами вычитания с уменьшенными высокочастотными составляющими, или на основе значений расхождения, являющихся возведенными в квадрат взвешенными по шуму результатами вычитания с подавленными высокочастотными составляющими.
Блок 13 реконструкции также может быть адаптирован для реконструкции второго изображения объекта на основе собранных проекционных значений и определяемого изображения расхождения для уменьшения артефактов изображения, вызванных расхождениями между собранными проекционными значениями и реконструкционным допущением. Например, реконструкционные допущения могут быть модифицированы так, что расхождения, представленные в изображении расхождения, уменьшаются, в частности, реконструкционные допущения могут быть оптимизированы так, что расхождения, представленные изображением расхождения, минимизируются. Изображение интересующей области затем может быть реконструировано по собранным проекционным значениям с использованием оптимизированных реконструкционных допущений.
Устройство 10 обработки проекционных значений дополнительно содержит блок 20 наложения для наложения реконструированного первого изображения и изображения расхождения. Это позволяет непосредственно продемонстрировать пользователю, на какие части первого изображения влияют артефакты изображения, вызванные расхождениями собранных проекционных значений по отношению к реконструкционным допущениям. Изображение расхождения также может быть использовано для наложения поверх других изображений, таких как реконструированное второе изображение.
Устройство 10 обработки проекционных значений дополнительно содержит блок 11 отображения для отображения значений расхождения, которые предпочтительно формируют синограмму расхождения, изображения расхождения, наложенного поверх первого изображения или поверх другого реконструированного изображения, такого как второе изображение, и откорректированного изображения, то есть второго изображения, которое было реконструировано с использованием значений расхождения, в частности, сигнала временного расхождения и/или изображения расхождения.
Также устройство обработки проекционных значений предпочтительно управляется блоком 9 управления.
Ниже описан способ формирования изображения для формирования изображения интересующей области со ссылкой на блок-схему последовательности операций, представленную на фиг.2.
Способ формирования изображения для формирования изображения интересующей области является, в этом варианте осуществления, способом формирования изображения компьютерной томографии. На этапе 101, источник 2 излучения вращается вокруг оси R вращения и объект или исследуемая зона 5 не движутся, то есть источник 2 излучения движется вдоль круговой траектории вокруг объекта или исследуемой зоны 5. В другом варианте осуществления, источник 2 излучения может двигаться по другой траектории, например по спиральной траектории, относительно объекта. Источник 2 излучения испускает излучение, проходящее объект, по меньшей мере в интересующей области. Излучение, которое прошло объект, обнаруживается детекторным устройством 6, которое генерирует измеренные данные, являющиеся проекционными данными.
Собранные проекционные значения передаются в устройство 10 обработки проекционных значений и, на этапе 102 предоставленные собранные проекционные значения используются для реконструкции первого изображения объекта в рассматриваемой интересующей области при реконструкционных допущениях. На этапе 103, смоделированные проекционные значения определяются посредством моделирования проекции через рассматриваемое реконструируемое первое изображение при реконструкционных допущениях. На этапе 104, собранные проекционные значения проходят низкочастотную фильтрацию, и на этапе 105, прошедшие низкочастотную фильтрацию собранные проекционные значения и смоделированные проекционные значения вычитаются друг из друга. Результаты вычитания, в которых высокочастотные составляющие подавлены, уже могут рассматриваться как значения расхождения.
На этапе 106, для каждого собранного проекционного значения, то есть для каждого значения расхождения, определяется значение шума, и на этапе 107 значения расхождения взвешиваются посредством обратных значений соответственных величин шума. На этапе 108 взвешенные значения расхождения возводятся в квадрат.
На этапе 109, сигнал временного расхождения определяется посредством назначения моментов времени сбора, в которые собранные проекционные значения были получены, значениям расхождения, определяемым для собранных проекционных значений соответственных моментов времени сбора. Значения расхождения, принадлежащие к одному и тому же моменту времени сбора, усредняются, чтобы сгенерировать одномерный сигнал временного расхождения. Вместо усреднения значений расхождения, принадлежащих к одному и тому же моменту времени сбора, значения расхождения также могут просто суммироваться. На этапе 110 реконструируется второе изображение на основе собранных проекционных значений и определяемого временного сигнала расхождения для уменьшения артефактов изображения, вызванных расхождениями между собранными проекционными данными и реконструкционными допущениями. На этапе 111 второе изображение отображается пользователю на блоке отображения.
Этапы 102 и 111 могут рассматриваться как этапы способа обработки проекционных значений. В способе обработки проекционных значений этапы от 109 до 111 могут быть опущены, то есть способ обработки проекционных значений может быть адаптирован только к определению значений расхождения. Также этапы от 106 до 108, которые связаны с определением шума, взвешиванием шума и возведением в квадрат могут быть опущены. Кроме того, способ обработки проекционных значений может содержать другие этапы для использования значений расхождения другими способами, как описано выше более подробно.
На фиг.3 схематично и примерно представлена синограмма 25 собранных проекционных значений. На фиг.3 горизонтальная ось указывает время t, а вертикальная ось указывает i-ое собранное проекционное значение, измеренное в соответственный момент t времени. Синограмма, представленная на фиг.3, искажена движением, то есть на синограмме появляются артефакты по причине расхождения между собранными проекционными значениями, на которые влияет движение объекта в интересующей области, и реконструкционного допущения о том, что движение в интересующей области отсутствует. Объект, через который прошли рентгеновские лучи для генерации собранных проекционных значений, в этом варианте осуществления является фантомом грудной клетки, в центре которого движется небольшая сфера. Это движение является исключительно небольшим и поэтому соответствующее искажение не видимо на синограмме, представленной на фиг.3.
На фиг.4 схематично и примерно представлено реконструированное первое изображение 29, которое было реконструировано с использованием собранных проекционных значений представленных на фиг.3. Центральный элемент 22 внутри грудной клетки 21 движется, тем самым, являясь причиной артефактов движения в реконструированном первом изображении вблизи центрального элемента 22.
На фиг.5 схематично и примерно представлены значения расхождения, которые были определены для собранных проекционных значений и которые формируют синограмму 26 расхождения. Расхождения, представленные на фиг.5, главным образом, обусловлены движением центрального элемента 22. Таким образом, хотя искаженная синограмма собранных проекционных значений, представленная на фиг.3, не показывает искажения движением, результирующее расхождение, то есть движение, может быть обнаружено на синограмме расхождения. Таким образом, значения расхождения могут быть использованы для определения движения интересующей области, если реконструкционное допущение таково, что движение в интересующей области, которая реконструируется, отсутствует. Линия 23 не является частью синограммы расхождения и просто указывает период движения центрального элемента 22. Как можно видеть на фиг.5, продолжительность значений 24 расхождения соответствует периоду движения 23. Структуры собранных проекционных значений больше не видны на синограмме расхождения, представленной на фиг.5.
На фиг.6 схематично и примерно представлен сигнал I(t) временного расхождения, который был определен посредством суммирования значений расхождения, представленных на фиг.5, которые соответствуют одному и тому же моменту времени сбора, в условных единицах. Таким образом, одномерный сигнал временного расхождения сгенерирован на основе синограммы расхождения, представленной на фиг.5. Сигнал 27 временного расхождения очень хорошо коррелирует с фактическим периодом движения и показывает очень хорошее отношение сигнала к фону.
На фиг.7 схематично и примерно представлено изображение 28 расхождения, где большое расхождение, то есть низкий уровень достоверности, изображено белым цветом. Зоны низкой достоверности совпадают с положением артефактов движения в реконструированном первом изображении, представленном на фиг. 4. Изображение расхождения, представленное на фиг.7, было сгенерировано посредством обратного проецирования без фильтрации синограммы расхождения, которая представлена на фиг.5.
Алгоритмы реконструкции изображения по проекционным значениям обычно предполагают, что измеренные данные соответствуют линейным интегралам по стационарному объекту. Если это предположение не выполняется, например, в связи с движением, временным изменением поглощения внутри объекта или металла, реконструированное изображение показывает артефакты. Устройство и способ обработки собранных проекционных значений могут быть применены к собранным проекционным значениям для анализа того, согласуются ли собранные проекционные значения с реконструкционными допущениями алгоритма реконструкции. Обнаруженные расхождения в собранных проекционных значениях, то есть значения расхождения, могут быть использованы для генерации сигнала движения, который показывает в какой момент времени возникает движение точек, если реконструкционное допущение таково, что объект, который должен быть реконструирован, не движется, и чтобы создать изображение расхождения, которое также может рассматриваться как изображение достоверности, которое показывает те воксели реконструированного изображения, на которые влияет расхождение собранных проекционных значений, то есть которое показывает положение артефактов изображения. Информация, полученная из расхождения собранных проекционных значений, может быть использована в последующей реконструкции изображения, которая пытается свести к минимуму артефакты.
Изображение расхождения может быть представлено такому пользователю , как врач-радиолог, в виде указания, какие части изображения не следует использовать для диагностических целей. Изображение расхождения может быть адаптировано таким образом, что оно покажет вероятность того, что интенсивность вокселя верна. Следовательно, изображение расхождения может также рассматриваться как изображение достоверности, как уже указано выше, или как карта достоверности.
Предпочтительно, вычисляется степень расхождения для каждого собранного проекционного значения, то есть определяется значение расхождения. Степень расхождения может использоваться для генерации временного сигнала, который показывает, в какой момент времени возникает расхождение. Это полезно для идентификации частей собранных проекционных значений, которые принадлежат к одному и тому же состоянию движения объекта, которым может быть пациент. Например, может быть обнаружено неожиданное дыхание или могут быть обнаружены фазы сердечного цикла, которые могут использоваться для реконструкции изображения сердца человека или животного.
Изображение расхождения является по существу критерием хи-квадрат для каждого вокселя в реконструированном изображении, если расхождение изображения генерируется посредством суммирования всех значений расхождения, которые были взвешены по шуму и возведены в квадрат и которые вносят вклад в данный воксель, для вычисления значения хи-квадрата для этого вокселя. Используя известные свойства распределения хи-квадрата, полученное в результате значение соответствующего вокселя может быть использовано для вычисления вероятности того, что значение этого вокселя правильное, то есть, что на этот воксель не повлияло расхождение между собранными проекционными значениями и реконструкционным допущением. Для определения распределения хи-квадрат, предпочтительно предполагается, что шум подчиняется распределению по Гауссу. Вычисленные вероятности могут формировать модифицированное изображение расхождения, показывающее вероятность того, что соответствующий воксель не зависит от расхождений.
Хотя в описанных ваше вариантах осуществления система формирования изображения является системой компьютерной томографии, в других вариантах осуществления собранные проекционные значения могут быть собраны с помощью других модальностей формирования изображения, таких как система формирования изображения с рамой C-типа или система радионуклидного формирования изображения, такая как система позитрон-эмиссионной томографии или система однофотонной эмиссионной компьютерной томографии.
Хотя в описанных выше вариантах осуществления некоторые реконструкционные допущения использованы и некоторые реконструкционные допущения модифицированы, в упомянутых выше вариантах осуществления и также в других вариантах осуществления также другие реконструкционные допущения могут использоваться для реконструкции изображения и могут модифицироваться.
Изучив чертежи, раскрытие и приложенную формулу изобретения, специалисты в данной области смогут понять и осуществить при практической реализации заявленного изобретения другие вариации показанных вариантов осуществления.
В формуле изобретения слово «содержит» не исключает других элементов или этапов, и формы единственного числа не исключают множественного числа.
Один блок или устройство может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Тот факт, что некоторые меры перечисляются во взаимно различных зависимых пунктах формулы изобретения, не означает, что комбинация этих мер не может быть использована с пользой.
Такие вычисления, как реконструкция, моделирование или определение значений расхождения, выполненные одним или несколькими блоками или устройствами, могут быть выполнены любым другим числом блоков или устройств. Например, этапы от 102 до 110 могут быть выполнены одним или любым другим числом блоков. Вычисления и/или определения и/или управление системой формирования изображения в соответствии со способом формирования изображения и/или управление устройством обработки проекционных значений в соответствии со способом обработки проекционных значений можно реализовать в виде средств программного кода компьютерной программы и/или с помощью специализированного аппаратного обеспечения.
Компьютерная программа может храниться/распространяться на подходящем носителе, таком как оптическое запоминающее устройство или твердотельное запоминающее устройство, поставляемое вместе или как часть другого аппаратного обеспечения, но может также распространяться в других формах, например, через Интернет или через другие проводные или беспроводные телекоммуникационные системы.
Любые ссылочные позиции в формуле изобретения не должны рассматриваться в качестве ограничения объема.
Настоящее изобретение относится к устройству обработки проекционных значений для обработки собранных проекционных значений. Первое изображение реконструируется блоком реконструкции по рассматриваемым собранным проекционным значениям при реконструкционном допущении. Блок определения смоделированных проекционных значений определяет смоделированные проекционные значения посредством моделирования проекции через рассматриваемое реконструированное первое изображение при реконструкционном допущении, а значения расхождения для собранных проекционных значений определяются блоком определения расхождения, причем значение расхождения является указывающим степень расхождения соответствующего собранного проекционного значения с реконструкционным допущением, посредством сравнения собранных проекционных значений и смоделированных проекционных значений. Значения расхождения могут использоваться для различных целей, например для улучшения качества реконструированного изображения или для указания тех элементов изображения, на которые повлияло расхождение между реконструкционным допущением и собранными проекционными значениями.

Изобретение относится к устройству обработки значений проекции для обработки собранных значений проекции. Техническим результатом является улучшение качества реконструированного изображения. Первое изображение реконструируется блоком реконструкции по рассматриваемым собранным значениям проекции при реконструкционном допущении. Блок определения смоделированных значений проекции определяет смоделированные значения проекции посредством моделирования проекции через рассматриваемое реконструированное первое изображение при реконструкционном допущении, а значения расхождения для собранных значений проекции определяются с помощью блока определения расхождений, где значение расхождения является указывающим степень расхождения соответствующих собранных значений проекции с реконструкционным допущением, посредством сравнения собранных значений проекции и соответствующих смоделированных значений проекции. 6 н. и 9 з.п. ф-лы, 7 ил.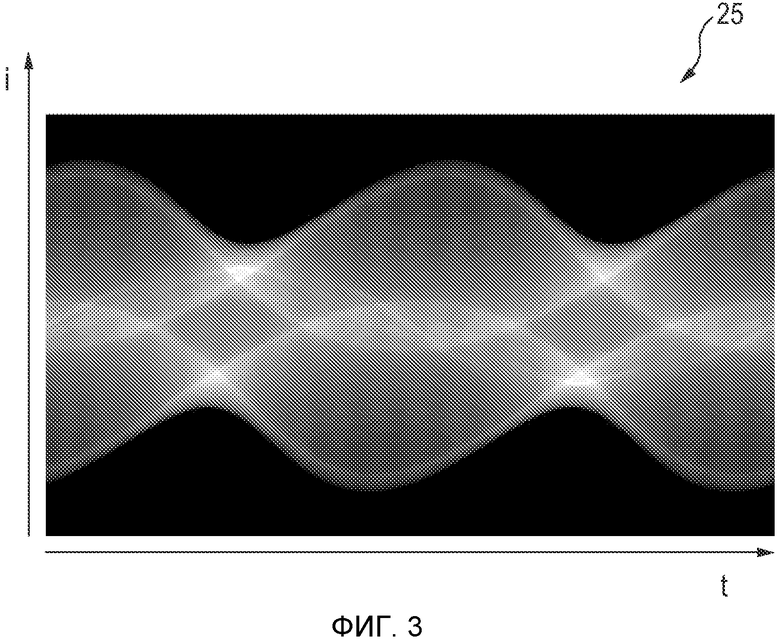
1. Устройство обработки значений проекции для обработки собранных значений проекции, причем устройство (10) обработки значений проекции содержит:
- блок (12) предоставления собранных значений проекции для предоставления собранных значений проекции,
- блок (13) реконструкции для реконструкции первого изображения (29) по собранным значениям проекции при рассмотрении реконструкционного допущения,
- блок (14) определения смоделированных значений проекции для определения смоделированных значений проекции посредством моделирования проекции через реконструированное первое изображение при рассмотрении упомянутого реконструкционного допущения,
- блок (15) определения расхождения для определения значений расхождения для собранных значений проекции, при этом значение расхождения указывает степень расхождения соответствующего собранного проекционного значения с реконструкционным допущением, посредством сравнения собранных значений проекции и смоделированных значений проекции,
при этом блок (15) определения расхождения содержит блок (16) определения разности для определения разностей между собранными значениями проекции и смоделированными значениями проекции, так что высокочастотная составляющая разностей подавляется больше, чем низкочастотная составляющая разностей, при этом блок определения расхождения адаптирован для определения значений расхождения для собранных значений проекции на основе определенных разностей.
2. Устройство обработки значений проекции по п.1, в котором блок (16) определения разности адаптирован для низкочастотной фильтрации собранных значений проекции и для определения разностей посредством вычитания друг из друга соответствующего собранного значения проекции, прошедшего низкочастотную фильтрацию, и смоделированного значения проекции, соответствующего соответствующему собранному значению проекции.
3. Устройство обработки значений проекции по п.1, в котором блок определения разности адаптирован для определения разностей посредством вычитания друг из друга соответствующего собранного значения проекции и смоделированного значения проекции, соответствующего соответствующему собранному значению проекции, для генерации результатов вычитания и низкочастотной фильтрации результатов вычитания.
4. Устройство обработки значений проекции по п.1, в котором блок определения разности адаптирован для определения разностей посредством вычитания друг из друга соответствующего собранного значения проекции и смоделированного значения проекции, соответствующего соответствующему собранному значению проекции, для генерации результатов вычитания, реконструкции изображения вычитания по результатам вычитания, определенным для собранных значений проекции, и моделирования проекции через реконструированное изображение вычитания.
5. Устройство обработки значений проекции по п.1, в котором блок (15) определения расхождения дополнительно содержит блок (17) взвешивания шума для определения значения шума для собранного значения проекции и для взвешивания определенной разности с обратным значением определенного значения шума, при этом блок (15) определения расхождения адаптирован для определения значения расхождения для собранного значения проекции на основе взвешенной разности.
6. Устройство обработки значений проекции по п.5, в котором блок (15) определения расхождения адаптирован для возведения в квадрат взвешенной разности и определения значения расхождения на основе возведенной в квадрат взвешенной разности.
7. Устройство обработки значений проекции по п.1, в котором собранные значения проекции были назначены моментам времени сбора, при этом устройство (10) обработки значений проекции дополнительно содержит блок (18) определения сигнала временного расхождения посредством назначения моментов времени сбора значениям расхождения, определенным для собранных значений проекции соответствующего момента времени сбора.
8. Устройство обработки значений проекции по п.1, в котором устройство обработки значений проекции дополнительно содержит блок (19) определения изображения расхождения для генерации изображения (28) расхождения, при этом для элемента изображения из изображения (28) расхождения добавляют значения расхождения, которые вносят вклад в соответствующий элемент изображения.
9. Устройство обработки значений проекции по п.8, в котором устройство (10) обработки значений проекции дополнительно содержит блок (20) наложения для наложения реконструированного первого изображения и изображения расхождения.
10. Устройство обработки значений проекции по п.1, в котором блок (13) реконструкции адаптирован для реконструкции второго изображения объекта по собранным значениям проекции и определенным значениям расхождения для уменьшения артефактов изображения, вызванных расхождениями между собранными значениями проекции и реконструкционным допущением.
11. Система формирования изображения для формирования изображения интересующей области, причем система (1) формирования изображения содержит:
- блок сбора значений проекции для сбора значений проекции интересующей области, и
- устройство (10) обработки значений проекции для обработки собранных значений проекции по п.1.
12. Способ обработки значений проекции для обработки собранных значений проекции, причем способ обработки значений проекции содержит этапы, на которых:
- предоставляют собранные значения проекции,
- реконструируют первое изображение по собранным значениям проекции при рассмотрении реконструкционного допущения,
- определяют смоделированные значения проекции посредством моделирования проекции через реконструированное первое изображение при рассмотрении реконструкционного допущения,
- определяют значения расхождения для собранных значений проекции, при этом значение расхождения указывает степень расхождения соответствующего собранного значения проекции с реконструкционным допущением, посредством сравнения собранных значений проекции и смоделированных значений проекции,
при этом разности между собранными значениями проекции и смоделированными значениями проекции определяют так, что высокочастотная составляющая разностей подавляется больше, чем низкочастотная составляющая разностей, и при этом значения расхождения для собранных значений проекции определяют на основе определенных разностей.
13. Способ формирования изображения для формирования изображения интересующей области, при этом способ формирования изображения содержит следующие этапы, на которых:
- собирают значения проекции интересующей области, и
- обрабатывают собранные значения проекции по п.12.
14. Считываемый компьютером носитель для обработки собранных значений проекции, при этом считываемый компьютером носитель содержит компьютерную программу, содержащую средства программного кода для побуждения устройства обработки значений проекции по п.1 выполнять этапы способа обработки значений проекции по п.12, когда компьютерную программу запускают на компьютере, управляющем устройством обработки значений проекции.
15. Считываемый компьютером носитель для формирования изображения интересующей области, при этом считываемый компьютером носитель содержит компьютерную программу, содержащую средства программного кода для побуждения системы формирования изображения по п.11 выполнять этапы способа формирования изображения по п.13, когда компьютерную программу запускают на компьютере, управляющем системой формирования изображения.
| US20090074278 A1, 19.03.2009 | |||
| US2008240335 A1, 02.10.2008 | |||
| US20050259780 A1, 24.11.2005 | |||
| US6915005 B1, 05.07.2005 | |||
| СПОСОБ ПОЛУЧЕНИЯ ТОМОГРАФИЧЕСКОГО ИЗОБРАЖЕНИЯ ТЕЛА И ЭЛЕКТРОИМПЕДАНСНЫЙ ТОМОГРАФ | 1996 |
|
RU2127075C1 |

