Нижеследующее описание, в общем, касается визуализации реконструированных данных изображения и представлено применительно к компьютерной томографии (CT). Однако приведенное ниже описание может найти применение и в других технологиях.
Радиологи обучаются прочтению изображений, имеющих определенный внешний вид вследствие шума, который используется в качестве индикатора определенных характеристик изображения. Например, шум может предоставить эксперту уровень достоверности в отношении структур, форм и/или контуров на изображении. Например, более высокий визуальный шум может свидетельствовать о более низкой вероятности того, что визуализированные структуры, формы и контуры представляют подлинные структуры, формы и контуры, а более низкий визуальный шум может указывать на более высокую вероятность того, что визуализированные структуры, формы и контуры представляют подлинные структуры, формы и контуры.
В другом примере текстура изображения свидетельствует о базовом пространственном разрешении изображения. Например, «неравномерно окрашенный» шум может говорить о более низком разрешении, а «чистый» шум может являться показателем более высокого разрешения. В еще одном примере вид шума на подучастке области ткани, визуализированной в одном и том же диапазоне шкалы серого цвета, может свидетельствовать о том, что эта область включает в себя различные ткани. Например, диапазон может находиться лишь в пределах шума одной ткани, что приводит к определенным пикселям серого цвета, и за пределами шума другой ткани, что позволяет эксперту провести различия между двумя тканями, не прибегая к необходимости сдвига диапазона шкалы серого цвета.
Для снижения шума в реконструированных данных изображения использовались алгоритмы шумоподавления (в области проекций и/или изображения), а также новейшие технологии реконструкции изображений. Однако снижение шума также устраняет (частично или полностью, в зависимости от алгоритма шумоподавления) рассмотренные выше зрительные признаки, которые эксперты используют для определения уровня достоверности и/или разрешения, и/или распознавания другой ткани. К сожалению, это может побудить радиолога отказаться от применения алгоритма реконструкции с шумоподавлением, поскольку конечные реконструированные изображения могут иметь иные характеристики по сравнению с изображениями, анализу которых они обучены.
Аспекты, представленные в настоящем описании, направлены на решение вышеуказанных и других проблем.
Ниже описан подход, при котором реконструированные данные изображения, реконструированное изображение с пониженным шумом (или с шумоподавлением) и/или сочетание таковых одновременно визуально представляются наблюдателю, что позволяет визуально представить и/или наблюдать зрительные признаки, которые предоставляют шум, и/или наблюдать данные изображения (установленные по умолчанию или заданные пользователем) с пониженным уровнем шума, что может лучше продемонстрировать искомые признаки, которые иначе могли бы быть скрыты при устранении шума.
В одном аспекте способ включает в себя обработку проекционных данных с помощью первого алгоритма реконструкции, а также реконструкцию первых реконструированных данных объемного изображения, при этом первые реконструированные данные объемного изображения обладают первой 3D шумовой функцией. Способ дополнительно включает в себя обработку тех же проекционных данных с помощью второго, отличного алгоритма реконструкции, а также реконструкцию вторых реконструированных данных объемного изображения, при этом вторые реконструированные данные объемного изображения обладают второй 3D шумовой функцией, отличной от первой 3D шумовой функции. Способ дополнительно включает в себя визуальное представление первых или вторых реконструированных данных объемного изображения в главном демонстрационном окне. Способ дополнительно включает в себя визуальное представление подучастка других из числа первых и вторых реконструированных данных объемного изображения в исследуемой области, наложенной на подучасток главного демонстрационного окна.
В другом аспекте способ включает в себя обработку проекционных данных с помощью первого алгоритма реконструкции, а также реконструкцию первых реконструированных данных объемного изображения, при этом первые реконструированные данные объемного изображения обладают первой 3D шумовой функцией. Способ дополнительно включает в себя обработку тех же проекционных данных с помощью второго, отличного алгоритма реконструкции, а также реконструкцию вторых реконструированных данных объемного изображения, при этом вторые реконструированные данные объемного изображения обладают второй 3D шумовой функцией, которая отличается от первой шумовой функции. Способ дополнительно включает в себя получение исследуемого уровня шума. Способ дополнительно включает в себя объединение первых и вторых данных объемного изображения и создание объединенных первых и вторых данных объемного изображения на основе исследуемого уровня шума. Способ дополнительно включает в себя визуальное отображение объединенных данных объемного изображения.
В другом аспекте система включает в себя устройство для реконструкции, которое реконструирует один и тот же набор проекционных данных с использованием неодинаковых алгоритмов реконструкции, генерируя первые и вторые реконструированные данные изображения. Один из алгоритмов реконструкции представляет собой алгоритм реконструкции с шумоподавлением. Устройство для реконструкции, по меньшей мере, визуально отображает первые или вторые реконструированные данные изображения с использованием наложения, включающего подучасток реконструированных данных изображения с подавленным шумом и наложенного поверх подучастка визуально отображенных данных изображения, либо объединяет первые и вторые реконструированные данные изображения на основе входного уровня шума, создавая объединенные данные изображения, а также визуально отображает объединенные данные изображения.
Изобретение может быть реализовано с использованием различных компонентов и схем расположения компонентов, а также различных этапов и схем чередования этапов. Чертежи приведены лишь в целях иллюстрации предпочтительных вариантов осуществления и не должны рассматриваться как ограничивающие изобретение.
На ФИГУРЕ 1 схематично показана визуализирующая система, включающая в себя устройство для реконструкции.
На ФИГУРЕ 2 показан один неограничивающий пример устройства для реконструкции, представленного на ФИГУРЕ 1.
На ФИГУРЕ 3 показан пример способа реконструкции одних и тех же проекционных данных с использованием двух неодинаковых алгоритмов реконструкции, при этом один из них - алгоритм реконструкции с шумоподавлением, и одновременного отображения реконструированных данных изображения, полученных по обоим алгоритмам реконструкции.
На ФИГУРЕ 4 показан пример способа реконструкции одних и тех же проекционных данных с использованием двух неодинаковых алгоритмов реконструкции, при этом один из них - алгоритм реконструкции с шумоподавлением, объединения реконструированных данных изображения, полученных по обоим алгоритмам реконструкции на основе исследуемого уровня шума, а также отображения объединенных реконструированных данных изображения.
Ниже описан подход, в котором реконструированные данные изображения с непониженным шумом, реконструированное изображение с пониженным шумом и/или сочетание таковых визуально представлены наблюдателю, что позволяет визуально представить и/или наблюдать зрительные признаки, которые предоставляет шум, и/или наблюдать данные изображения (установленные по умолчанию или заданные пользователем) с пониженным уровнем шума, что может лучше продемонстрировать искомые признаки, которые иначе могли бы быть скрыты при устранении шума.
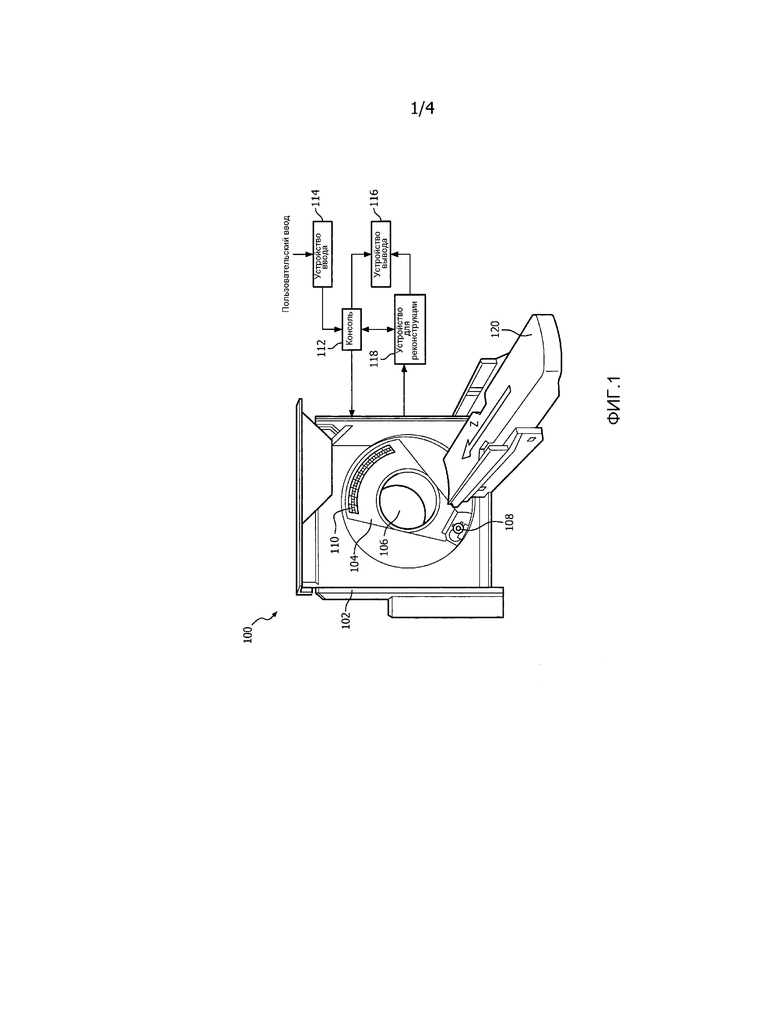
На ФИГУРЕ 1 показана визуализирующая система 100, такая как сканер компьютерного томографа (CT).
Визуализирующая система 100 включает в себя в общем стационарный гантри 102 и поворотный гантри 104. Поворотный гантри 104 поддерживается с возможностью вращения стационарным гантри 102 и осуществляет вращение вокруг области обследования вокруг продольной или z-оси.
Опора 120 пациента, такая как кушетка, служит опорой объекту или субъекту, например пациенту, в области обследования. Опора 120 выполнена с возможностью перемещения объекта или субъекта для загрузки, сканирования и/или выгрузки объекта или субъекта. Источник 108 излучения, такой как рентгеновская трубка, поддерживается с возможностью вращения поворотным гантри 104. Источник 108 излучения совершает вращение вместе с поворотным гантри 104 и испускает излучение, пересекающее область 106 обследования.
Чувствительная к излучению матрица 110 детекторов охватывает угловую дугу противоположно источнику 108 излучения на другой стороне области 106 обследования. Матрица 110 детекторов включает в себя один или более рядов детекторов, продолжающихся вдоль направления по z-оси, детектирует излучение, пересекающее область 106 обследования, и генерирует проекционные данные, которые содержат о нем информацию.
Вычислительная система или компьютер общего назначения служит операторной консолью 112 и включает в себя устройство (устройства) 114 ввода, такое как манипулятор типа «мышь», клавиатура и/или т.п., устройство (устройства) 116 вывода, такое как монитор устройства отображения, устройство вывода на пленку (filmer) и т.п. Консоль 112 позволяет оператору управлять работой системы 100. Это включает в себя выбор одного или более алгоритмов реконструкции, таких как обратное проецирование с фильтрацией, шумоподавление, сочетание таковых и/или иной алгоритм реконструкции, активацию и позиционирование подвижного наложения исследуемой области (ROI) поверх подучастка первой реконструкции для отображения вторых, отличных реконструированных данных изображения в ROI и/или связанном с ней демонстрационном окне, указание уровня шума для реконструкции и т.д.
Устройство 118 для реконструкции обрабатывает проекционные данные и реконструирует данные объемного изображения. Как подробнее описано ниже, в одном примере устройство 118 для реконструкции воспроизводит реконструированные данные объемного изображения без шумоподавления, реконструированное объемное изображение с пониженным шумом (шумоподавлением) и/или сочетание таковых. Конечные данные объемного изображения могут быть визуально представлены, что позволяет визуализировать подсказки, предоставляемые шумом в данных объемного изображения. Реконструированные данные объемного изображения с пониженным шумом и/или комбинированные могут отображаться одновременно и/или по отдельности. Эти данные лучше демонстрируют искомые признаки, которые иначе были бы скрыты при устранении шума. Данные могут отображаться посредством одного или нескольких мониторов устройства (устройств) 116 вывода.
Как дополнительно подробнее показано ниже, устройство 118 для реконструкции может использовать реконструкцию с обратным проецированием с фильтрацией (FBP), алгоритм реконструкции с пониженным шумом (в пространстве изображений и/или пространстве проекций) (например, итеративной реконструкции) и/или иной алгоритм. Следует понимать, что устройство 118 для реконструкции может быть реализовано посредством микропроцессора (микропроцессоров), исполняющего машиночитаемую инструкцию (машиночитаемые инструкции), закодированную или внедренную на машиночитаемый носитель информации, такой как физическая память или иной энергонезависимый носитель. Дополнительно или в качестве альтернативы микропроцессор (микропроцессоры) может выполнять машиночитаемую инструкцию (машиночитаемые инструкции), переносимую несущей волной, сигналом и другим промежуточным (или энергонезависимым) носителем.
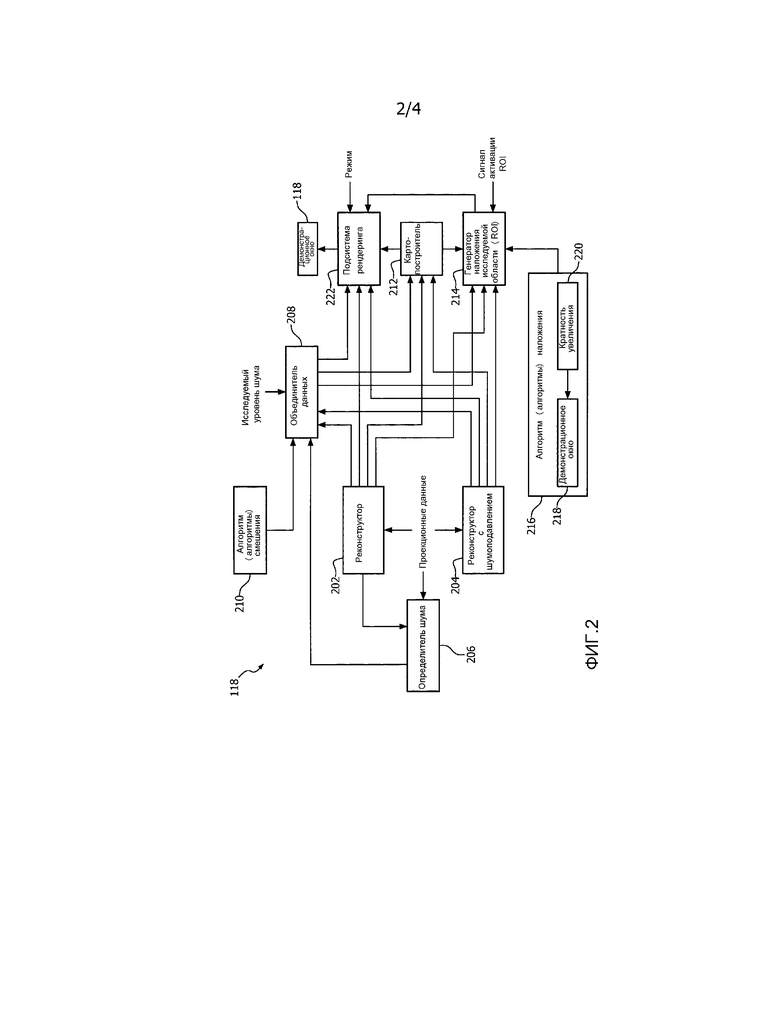
На ФИГУРЕ 2 схематично показан пример устройства 118 для реконструкции.
Средство реконструкции (реконструктор) 202 обрабатывает проекционные данные, которые могут генерироваться визуализирующей системой 100 и/или другой визуализирующей системой, а также могут быть получены из визуализирующей системы и/или архива данных, такого как система архивации и передачи изображений (PACS), рентгенологическая информационная система (RIS), больничная информационная система (HIS) и/или другого архива данных. Представленный реконструктор 202 использует обратное проецирование с фильтрацией, алгоритм реконструкции в конических пучках и/или иной алгоритм реконструкции без шумоподавления или с шумоподавлением. Реконструктор 202 обрабатывает проекционные данные и генерирует реконструированные данные объемного изображения.
Реконструктор 204 с шумоподавлением обрабатывает те же проекционные данные. Однако реконструктор 202 использует алгоритм реконструкции с понижением шума, который может включать в себя итеративный и/или иной алгоритм реконструкции с понижением шума. Реконструктор 202 с шумоподавлением генерирует реконструированные данные объемного изображения с пониженным шумом (шумоподавлением), имеющие уровень шума (например, стандартное отклонение по всему изображению или его подучастку) ниже уровня шума соответствующей области реконструированных данных объемного изображения, сгенерированных реконструктором 202.
В представленном варианте осуществления реконструктор 202 и реконструктор 204 с шумоподавлением показаны в виде двух разных реконструкторов. Однако, как вариант, реконструктор 202 и реконструктор 204 с шумоподавлением представляют собой один и тот же реконструктор, реконструирующий одни и те же проекционные данные с использованием двух разных алгоритмов реконструкции и генерирующий два разных набора реконструированных данных изображения, а именно реконструированные данные изображения с непониженным шумом и реконструированные данные изображения с пониженным шумом.
Средство определения (определитель) 206 шума определяет шум (например, 3D функцию, среднее значение и т.д.) для реконструированных данных объемного изображения и/или их подучастка, и/или реконструированных данных объемного изображения с пониженным шумом и/или их подучастка. В представленном варианте осуществления определитель 206 шума может дополнительно или в качестве альтернативы определять шум на основе проекционных данных. Дополнительно или в качестве альтернативы оценки шума могут основываться на различии между реконструированными данными объемного изображения и реконструированными данными объемного изображения с пониженным шумом. Данное описание предполагает существование и других подходов.
Средство объединения (объединитель) 208 данных объединяет реконструированные данные объемного изображения с непониженным шумом и реконструированные данные объемного изображения с пониженным шумом, создавая объединенные данные объемного изображения. В представленном варианте осуществления объединитель 208 данных объединяет реконструированные данные объемного изображения с непониженным шумом и реконструированные данные объемного изображения с пониженным шумом на основе алгоритма (алгоритмов) 210 смешения, используя величину шума для каждого воксела реконструированного объемного изображения с непониженным шумом и воксела реконструированного объемного изображения с пониженным шумом, а также целевой уровень шума. Целевой уровень шума может быть задан по умолчанию и/или установлен пользователем (например, определяемый входным сигналом исследуемого уровня шума, содержащим информацию об исследуемом уровне шума (например, стандартное отклонение, дисперсию и т.д.)).
Средство соотнесения (картопостроитель) 212 осуществляет построение физической карты или соотносит вокселы реконструированных данных объемного изображения с непониженным шумом, реконструированных данных объемного изображения с пониженным шумом и/или объединенных данных объемного изображения. Например, карта соотносит каждый воксел (x,y,z) реконструированных данных объемного изображения с непониженным шумом, реконструированных данных объемного изображения с пониженным шумом и/или объединенных данных объемного изображения с вокселом других реконструированных данных объемного изображения с непониженным шумом, реконструированных данных объемного изображения с пониженным шумом и/или объединенных данных объемного изображения.
Средство генерации (генератор) 214 наложения исследуемой области (ROI), будучи активированным, генерирует наложение ROI, которая накладывается на предоставленные данные объемного изображения и может перемещаться относительно них, на основе алгоритма (алгоритмов) 216 наложения. Активация может осуществляться в ответ на получение входного сигнала активации ROI, свидетельствующего об активации пользователем средства управления (например, физической кнопки, нажатие кнопки мыши, прикосновение к сенсорному экрану, распознавание голосового сообщения и т.д.), инициирующего активацию. Щелчок мышью и/или область прикосновения могут быть выполнены в виде кнопки, наборного диска, ползунка, ниспадающего меню и т.д. Без активации или по завершении активации генератор 214 наложения исследуемой области (ROI) удаляет любую наложенную ROI с дисплея. Завершение может инициироваться посредством активации пользователем того же и/или другого средства управления.
В общем случае, наложение ROI, будучи нанесенным или наложенным поверх первых отображенных реконструированных данных объемного изображения, идентифицирует область предоставленных первых отображенных данных объемного изображения, в которой визуально представлены вторые данные объемного изображения, реконструированные с использованием второго, отличного алгоритма реконструкции. Вторые данные объемного изображения, визуально представленные в наложении ROI, соответствуют тому же местоположению в первых отображенных реконструированных данных объемного изображения, что и первые отображенные реконструированные данные объемного изображения позади наложения ROI. Карта картопостроителя 212 обеспечивает данное картирование. Наложение ROI может выбираться из набора заданных форм (например, кольцевой, эллиптической, прямоугольной, неправильной и т.д.), нарисованной от руки пользователем и/или созданной иначе. Кроме того, наложение ROI может изменяться по размеру, форме и/или подвергаться иным манипуляциям.
В качестве опции, может отображаться высвечиваемое на экране демонстрационное окно 218, расположенное поверх участка первых отображенных реконструированных данных объемного изображения и/или в области, не наложенной на первые отображенные реконструированные данные объемного изображения. Демонстрационное окно 218 может аналогичным образом активироваться и/или закрываться. Демонстрационное окно 218 обычно имеет более крупную зону обзора по сравнению с наложением ROI и отображает ту же самую информацию, когда кратность увеличения 220 соответствует различию или соотношению между геометрией областей наложения ROI и зоны обзора демонстрационного окна. Повышение кратности увеличения 220 может соответственно увеличить зону обзора демонстрационного окна и/или увеличить изображение, не показывая области по наружному периметру. Когда демонстрационное окно 218 активировано, наложение ROI может визуально представлять первые реконструированные данные объемного изображения (такие как область за пределами наложения ROI) или вторые реконструированные данные объемного изображения (такие как демонстрационное окно 218).
Подсистема 222 рендеринга визуализирует данные посредством дисплейного монитора из состава устройства (устройств) 116 вывода. Это включает в себя рендеринг одного или более реконструированных данных объемного изображения с непониженным шумом, реконструированных данных объемного изображения с пониженным шумом и/или объединенных реконструированных данных изображения. В качестве опции, подсистема 222 рендеринга может визуализировать наложение ROI. В качестве опции, подсистема 222 рендеринга может визуализировать высвечиваемое на экране демонстрационное окно 218. Ввод данных, указывающих на режим работы, определяет, что именно визуализирует подсистема 222 рендеринга.
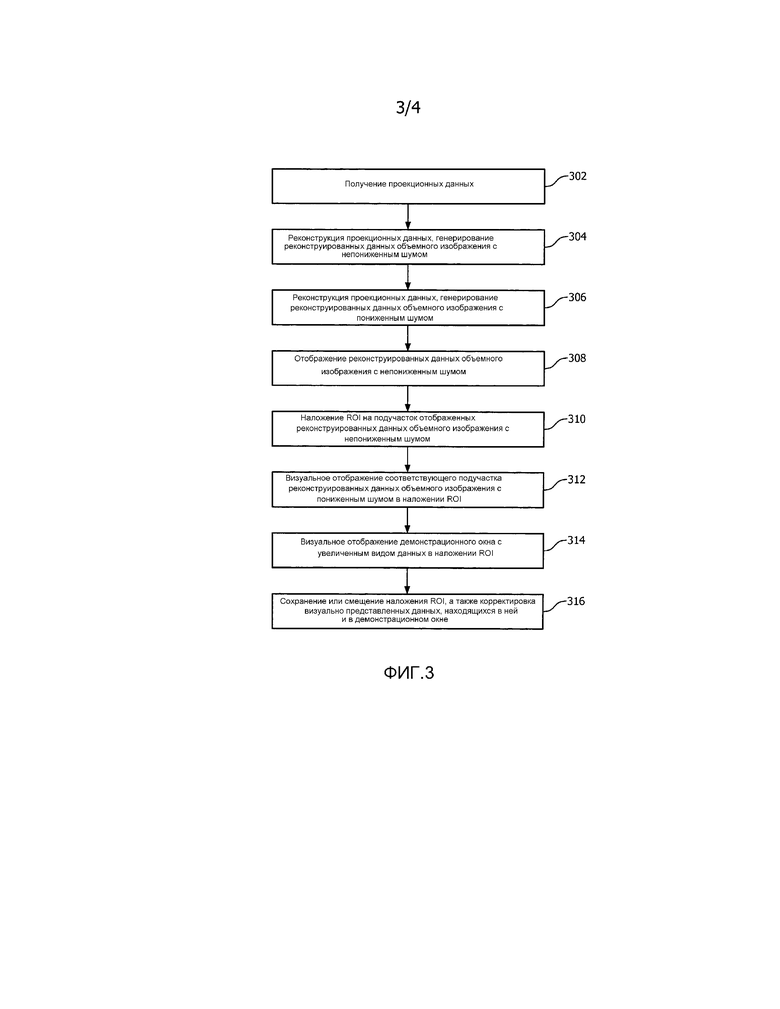
На ФИГУРЕ 3 показан пример способа, в котором подвижное наложение ROI и возможное демонстрационное окно наложены на визуализированные реконструированные данные объемного изображения.
Следует понимать, что последовательность действий в способе не является ограничивающей. В этой связи предполагается возможность и других порядков действий. Кроме того, одно или несколько действий могут быть исключены и/или одно или более дополнительных действий могут быть добавлены.
На этапе 302 получают проекционные данные.
На этапе 304 реконструктор реконструирует проекционные данные, генерируя реконструированные данные объемного изображения с непониженным шумом.
На этапе 306 тот же или другой реконструктор реконструирует проекционные данные, генерируя реконструированные данные объемного изображения с пониженным шумом (шумоподавлением).
На этапе 308 реконструированные данные объемного изображения с непониженным шумом отображаются в основной области отображения.
На этапе 310 наложение ROI осуществляется на подучасток отображаемых реконструированных данных объемного изображения с непониженным шумом.
На этапе 312 подучасток реконструированных данных объемного изображения с пониженным шумом, соответствующих реконструированным данным объемного изображения с непониженным шумом, отображается в наложении ROI.
На этапе 314, будучи активированным, высвечиваемое на экране демонстрационное окно также отображается и включает в себя те же данные, что и в наложении ROI, но в увеличенном виде.
На этапе 316 наложение ROI сохраняется или смещается, если визуально представленные данные подвергаются корректировке в наложении ROI и демонстрационном окне для отражения местоположения.
Вышеописанные действия могут быть реализованы посредством машиночитаемых инструкций, закодированных или внедренных на машиночитаемый носитель информации, которые при выполнении процессором (процессорами) компьютера заставляют процессор (процессоры) осуществлять описанные действия. Дополнительно или в качестве альтернативы, по меньшей мере, одна из машиночитаемых инструкций выполняется с помощью сигнала, несущей волны или другого промежуточного носителя.
В одном варианте вышесказанного реконструированные данные объемного изображения с пониженным шумом отображаются в области отображения, а реконструированные данные объемного изображения с непониженным шумом или объединенные данные объемного изображения отображаются в наложении ROI. Реконструированные данные объемного изображения с пониженным шумом, реконструированные данные объемного изображения с непониженным шумом или объединенные данные объемного изображения отображаются в высвечиваемом на экране демонстрационном окне.
В другом варианте реконструированные данные объемного изображения с непониженным шумом отображаются в области отображения, а объединенные данные объемного изображения отображаются в наложении ROI. Реконструированные данные объемного изображения с пониженным шумом, реконструированные данные объемного изображения с непониженным шумом или объединенные данные объемного изображения отображаются в высвечиваемом на экране демонстрационном окне.
В еще одном варианте вышеописанного реконструированные данные объемного изображения с пониженным шумом отображаются в области отображения, а объединенные данные объемного изображения отображаются в наложении ROI. Реконструированные данные объемного изображения с пониженным шумом, реконструированные данные объемного изображения с непониженным шумом или объединенные данные объемного изображения отображаются в высвечиваемом на экране демонстрационном окне.
В еще одном варианте объединенные данные объемного изображения отображаются в области отображения, при этом либо реконструированные данные объемного изображения с непониженным шумом, либо реконструированные данные объемного изображения с пониженным шумом отображаются в наложении ROI. Реконструированные данные объемного изображения с пониженным шумом, реконструированные данные объемного изображения с непониженным шумом или объединенные данные объемного изображения отображаются в высвечиваемом на экране демонстрационном окне.
В любом из вышеперечисленных вариантов данные объемного изображения, отображаемые в наложении исследуемой области, могут переключаться между реконструированными данными объемного изображения с непониженным шумом, реконструированными данными объемного изображения с пониженным шумом или объединенными данными объемного изображения.
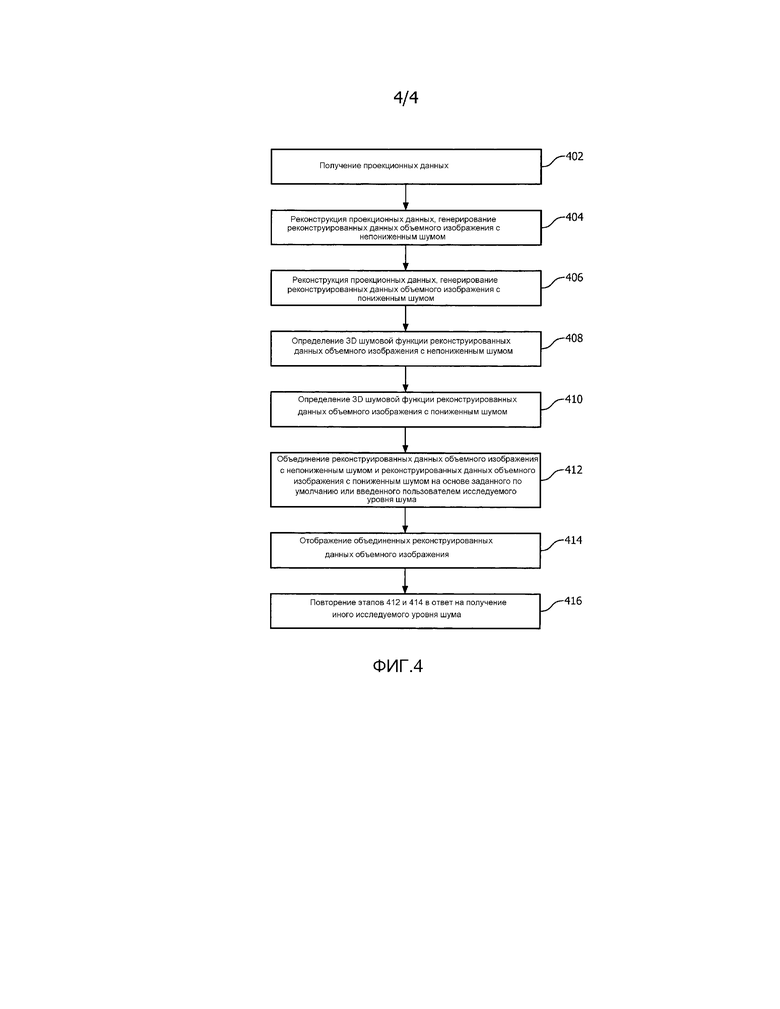
На ФИГУРЕ 4 показан пример способа, в котором генерируются и отображаются объединенные данные объемного изображения с непониженным шумом и с пониженным шумом.
Следует понимать, что последовательность действий в способах не является ограничивающей. В этой связи предполагается возможность и других порядков действий. Кроме того, одно или несколько действий могут быть исключены и/или одно или более дополнительных действий могут быть добавлены.
На этапе 402 получают проекционные данные.
На этапе 404 реконструктор реконструирует проекционные данные, генерируя реконструированные данные объемного изображения с неподавленным шумом.
На этапе 406 тот же или другой реконструктор реконструирует проекционные данные, генерируя реконструированные данные объемного изображения с пониженным шумом (шумоподавлением).
На этапе 408 определяется 3D шумовая функция реконструированных данных объемного изображения. На этапе 410 определяется 3D шумовая функция реконструированных данных объемного изображения с пониженным шумом.
На этапе 412 реконструированные данные объемного изображения с непониженным шумом и реконструированные данные объемного изображения с пониженным шумом объединяются на основе заданной по умолчанию или введенной пользователем исследуемой величины шума.
В одном примере исследуемая величина шума определяется посредством наложения ROI и/или демонстрационного окна по ФИГУРЕ 3.
На этапе 414 отображаются объединенные реконструированные данные объемного изображения.
На этапе 416 в ответ на получение иной исследуемой величины шума действия 412 и 414 повторяются.
Вышеописанные действия могут быть реализованы посредством машиночитаемых инструкций, закодированных или внедренных на машиночитаемый носитель информации, которые при их исполнении процессором (процессорами) компьютера заставляют процессор (процессоры) осуществлять описанные действия. Дополнительно или в качестве альтернативы, по меньшей мере, одна из машиночитаемых инструкций выполняется с помощью сигнала, несущей волны или другого промежуточного носителя.
Вышеописанное может применяться в связи с прочтением радиологом изображений субъекта, сканируемого в текущий момент времени. В качестве альтернативы вышеописанное может применяться в связи с прочтением радиологом изображений одного или более субъектов, просканированных ранее. Последнее может включать в себя доступ к базе данных ранее просканированных субъектов с предоставлением радиологу возможности просмотра результатов, полученных при различных реконструкциях с шумоподавлением, а также результатов, полученных при различных комбинациях на основе различных уровней шума.
Последнее может также использоваться применительно к визуальным потенциальным эффектам снижения дозы для получения скана. Это может включать в себя сначала определение и/или нахождение зависимости между шумом и дозой, затем предоставление либо искомой дозы, либо исследуемого шума, отображение соответствующего шума или соответствующей дозы, a также обработку и демонстрацию реконструированных данных объемного изображения. В данном случае пользователь может иметь возможность динамически изменять параметры дозы и/или шума и визуализировать эффекты с помощью последующих реконструкций.
Изобретение описано со ссылкой на предпочтительные варианты осуществления. Специалисты смогут предложить модификации и изменения, изучив настоящее описание. Предполагается, что изобретение включает все такие модификации и изменения в той мере, в которой они подпадают под объем притязаний прилагаемой формулы изобретения и ее эквивалентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИЗУАЛИЗАЦИЯ ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ В КОМБИНАЦИИ С ДВУМЕРНЫМИ ПРОЕКЦИОННЫМИ ИЗОБРАЖЕНИЯМИ | 2007 |
|
RU2471239C2 |
| ОПРЕДЕЛЕНИЕ ПРЕДСТАВЛЯЮЩЕЙ ИНТЕРЕС ОБЛАСТИ ПРИ ВИЗУАЛИЗАЦИИ СЕРДЦА | 2011 |
|
RU2562898C2 |
| 4D КОМПЬЮТЕРНАЯ ТОМОГРАФИЯ С КОНТРАСТНЫМ УСИЛЕНИЕМ (КТ) | 2012 |
|
RU2595476C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОБРАБОТКИ ПРОЕКЦИОННЫХ ДАННЫХ | 2010 |
|
RU2541860C2 |
| РЕДАКТИРОВАНИЕ МЕДИЦИНСКИХ ИЗОБРАЖЕНИЙ | 2015 |
|
RU2711140C2 |
| СПОСОБ УМЕНЬШЕНИЯ АРТЕФАКТОВ В ИЗОБРАЖЕНИЯХ КОНУСНО-ЛУЧЕВОЙ КОМПЬЮТЕРНОЙ ТОМОГРАФИИ | 2010 |
|
RU2543547C2 |
| ЛОКАЛЬНАЯ ПОЗИТРОННАЯ ЭМИССИОННАЯ ТОМОГРАФИЯ | 2008 |
|
RU2471204C2 |
| ИТЕРАТИВНОЕ ШУМОПОДАВЛЕНИЕ С ОБРАТНОЙ СВЯЗЬЮ ДЛЯ SENSE | 2013 |
|
RU2631404C2 |
| ТОМОГРАФИЧЕСКИЙ АППАРАТ И СПОСОБ РЕКОНСТРУКЦИИ ЕГО ТОМОГРАФИЧЕСКОГО ИЗОБРАЖЕНИЯ | 2015 |
|
RU2655091C2 |
| МНОГОМОДУЛЬНАЯ КОМПАКТНАЯ ТУННЕЛЬНАЯ СИСТЕМА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2011 |
|
RU2596010C2 |
Группа изобретений относится к медицинской технике, а именно к средствам визуализации реконструированных данных изображения применительно к компьютерной томографии. Способ содержит этапы, на которых обрабатывают проекционные данные с помощью первого алгоритма реконструкции и реконструируют первые реконструированные данные объемного изображения, при этом первые реконструированные данные объемного изображения обладают первой 3D шумовой функцией, обрабатывают те же проекционные данные с помощью второго, отличающегося алгоритма реконструкции и реконструируют вторые реконструированные данные объемного изображения, при этом вторые реконструированные данные объемного изображения обладают второй 3D шумовой функцией, отличающейся от первой 3D шумовой функции, выполняют визуальное представление первых или вторых реконструированных данных объемного изображения в главном демонстрационном окне и выполняют визуальное представление подучастка других из первых и вторых реконструированных данных объемного изображения в исследуемой области, наложенной на подучасток главного демонстрационного окна. Система для визуализации реконструированных данных изображения содержит устройство для реконструкции, которое выполнено с возможностью реконструировать один и тот же набор проекционных данных с использованием неодинаковых алгоритмов реконструкции и осуществлять визуальное отображение первых или вторых реконструированных данных изображения с использованием наложения, включающего в себя подучасток реконструированных данных изображения с подавленным шумом и наложенного поверх подучастка визуально отображаемых данных изображения. Использование изобретений позволяет повысить чувствительность диагностирования. 2 н. и 13 з.п. ф-лы, 4 ил.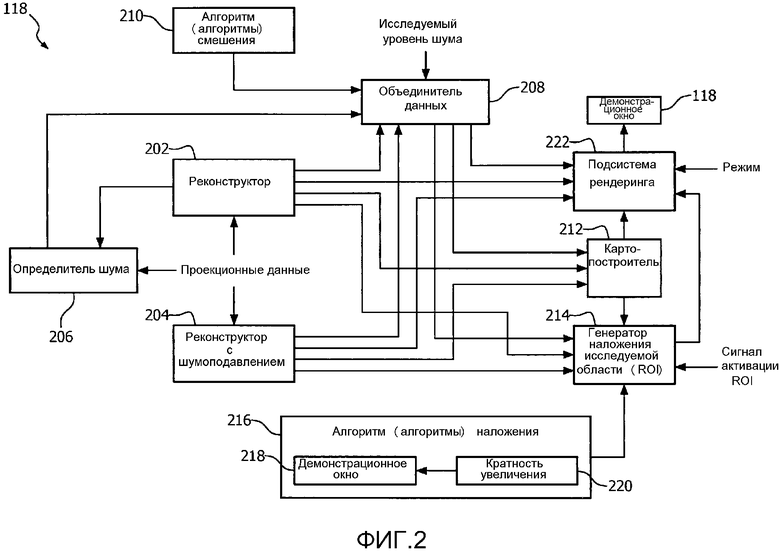
1. Способ визуализации реконструированных данных изображения, содержащий этапы, на которых:
обрабатывают проекционные данные с помощью первого алгоритма реконструкции и реконструируют первые реконструированные данные объемного изображения, при этом первые реконструированные данные объемного изображения обладают первой 3D шумовой функцией;
обрабатывают те же проекционные данные с помощью второго, отличающегося алгоритма реконструкции и реконструируют вторые реконструированные данные объемного изображения, при этом вторые реконструированные данные объемного изображения обладают второй 3D шумовой функцией, отличающейся от первой 3D шумовой функции;
выполняют визуальное представление первых или вторых реконструированных данных объемного изображения в главном демонстрационном окне; и
выполняют визуальное представление подучастка других из первых и вторых реконструированных данных объемного изображения в исследуемой области, наложенной на подучасток главного демонстрационного окна.
2. Способ по п.1, в котором наложение исследуемой области имеет первую зону обзора, при этом способ дополнительно содержит этап, на котором выполняют визуальное представление высвечиваемого на экране демонстрационного окна, имеющего вторую зону обзора, превышающую первую зону обзора, причем высвечиваемое на экране демонстрационное окно визуально представляет тот же подучасток упомянутых других из первых и вторых реконструированных данных объемного изображения, визуально представляемых в исследуемой области, но увеличенный на основе соотношения второй зоны обзора к первой зоне обзора.
3. Способ по п.1, в котором первые реконструированные данные объемного изображения представляют собой реконструированные данные объемного изображения с непониженным шумом, а вторые реконструированные данные объемного изображения представляют собой реконструированные данные объемного изображения с пониженным шумом.
4. Способ по п.1, в котором первые реконструированные данные объемного изображения представляют собой реконструированные данные объемного изображения с непониженным шумом, а вторые реконструированные данные объемного изображения представляют собой сочетание реконструированных данных объемного изображения с непониженным шумом и реконструированных данных объемного изображения с пониженным шумом.
5. Способ по п.1, дополнительно содержащий этапы, на которых:
принимают сигнал, указывающий на изменение положения наложения исследуемой области;
перемещают наложение исследуемой области в положение, указанное в данном сигнале; и
обновляют данные объемного изображения, отображаемые в наложении исследуемой области, на основе упомянутого положения.
6. Способ по п.1, дополнительно содержащий этап, на котором переключают данные объемного изображения, отображаемые в наложении исследуемой области, между первыми реконструированными данными объемного изображения и вторыми реконструированными данными объемного изображения.
7. Способ по п.1, дополнительно содержащий этап, на котором идентифицируют исследуемый уровень шума на основе данных объемного изображения, отображаемых в наложении исследуемой области.
8. Способ по п.7, дополнительно содержащий этапы, на которых:
объединяют первые и вторые данные объемного изображения, создавая объединенные данные объемного изображения, на основе идентифицированного исследуемого уровня шума; и
выполняют визуальное отображение объединенных данных объемного изображения.
9. Способ по п.1, дополнительно содержащий этапы, на которых:
получают исследуемый уровень шума, заданный пользователем;
объединяют первые и вторые данные объемного изображения, создавая объединенные данные объемного изображения, на основе исследуемого уровня шума, заданного пользователем; и
выполняют визуальное отображение объединенных данных объемного изображения.
10. Способ по п.9, дополнительно содержащий этапы, на которых:
получают изменение в исследуемом уровне шума, заданном пользователем;
перекомбинируют первые и вторые данные объемного изображения, создавая вторые объединенные данные объемного изображения, на основе измененного исследуемого уровня шума, заданного пользователем; и
выполняют визуальное отображение вторых объединенных данных объемного изображения.
11. Система (100) для визуализации реконструированных данных изображения, содержащая:
устройство (118) для реконструкции, которое выполнено с возможностью реконструировать один и тот же набор проекционных данных с использованием неодинаковых алгоритмов реконструкции и генерировать первые и вторые реконструированные данные изображения, причем один из алгоритмов реконструкции представляет собой алгоритм реконструкции с шумоподавлением, при этом устройство для реконструкции выполнено с возможностью осуществлять визуальное отображение первых или вторых реконструированных данных изображения с использованием наложения, включающего в себя подучасток реконструированных данных изображения с подавленным шумом и наложенного поверх подучастка визуально отображаемых данных изображения.
12. Система по п.11, в которой устройство для реконструкции выполнено с возможностью визуального отображения высвечиваемого на экране демонстрационного окна с увеличенным видом подучастка реконструированных данных изображения с подавленным шумом в наложении.
13. Система по п.11, в которой наложение является подвижным, при этом устройство для реконструкции выполнено с возможностью обновления данных в наложении и в высвечиваемом на экране демонстрационном окне в ответ на перемещение наложения в иное местоположение поверх визуально отображаемых данных изображения.
14. Система по п.11, в которой устройство для реконструкции выполнено с возможностью получать исследуемый уровень шума в виде пользовательского ввода и объединять первые и вторые реконструированные данные изображения на основе полученного исследуемого уровня шума.
15. Система по п.13, в которой устройство для реконструкции выполнено с возможностью получать изменение в исследуемом уровне шума в виде последующего пользовательского ввода и объединять первые и вторые реконструированные данные изображения на основе изменения в исследуемом уровне шума.
| WO2011036624 A1, 31.03.2011 | |||
| P | |||
| SAKELLAROPOULOS et al, An image visualization tool in mammography, Medical Informatics & The Internet in Medicine, 1999, vol | |||
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| WO 20073034342 A2, 29.03.2007 | |||
| СПОСОБ ИССЛЕДОВАНИЯ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ ГОЛОВНОГО МОЗГА, УСТРОЙСТВО ДЛЯ ИССЛЕДОВАНИЯ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ ГОЛОВНОГО МОЗГА И СПОСОБ ИЗМЕРЕНИЯ ПОДЭЛЕКТРОДНОГО СОПРОТИВЛЕНИЯ | 2003 |
|
RU2252692C2 |

