Нижеследующее описание относится в общем к устранению шума в данных восстановленного изображения, которое имеет конкретное применение в сканере для компьютерной томографии (CT), но также пригодно и для других сканеров, например, для гибридной PET/CT системы, цифровой рентгеновской системы и/или для другого визуализирующего сканера.
Сканер многосрезовой компьютерной томографии (CT) включает в себя рентгеновскую трубку, установленную на поворотном гентри, который поворачивается вокруг обследуемой области относительно продольной оси, или оси Z. Рентгеновская трубка испускает излучение, которое проходит через обследуемую область и, соответственно, через субъекта или предмет. Двумерная детекторная матрица опоясывает угловую дугу, находящуюся на противоположной стороне обследуемой области относительно рентгеновской трубки. Детекторная матрица включает в себя множество рядов детекторов, которые выровнены относительно друг друга и вытянуты вдоль оси Z. Детекторы регистрируют излучение, которое проходит через обследуемую область и соответствующего субъекта или предмет, и создают характеризующие его проекционные данные. Устройство восстановления изображения обрабатывает проекционные данные и восстанавливает характеризующие его данные объемного изображения.
Обычно данные изображения включают в себя некоторый уровень шума изображения, например, вследствие установленных параметров получения изображений и/или из-за детектора системы сбора данных и/или из-за другой электроники. Такой шум может ухудшить диагностическое значение данных изображения и, таким образом, процедуру визуализации, подвергая субъекта ионизирующему излучению, которое может в том числе увеличить риск онкологического заболевания для субъекта. Итерационная реконструкция (IR) была предложена для улучшения качества изображения как традиционное фильтрование реконструкции обратной проекции (FBP) и может быть использована для снижения дозы, подаваемой субъекту и/или для повышения ясности данных изображения для данной дозы.
Некоторые IR алгоритмы нацелены на то, чтобы максимизировать функцию стоимости, которая включает в себя вероятностное выражение, с которым сравниваются измеренные данные, и выражение штрафной функции, которое основано на функции Хьюбера. Примеры таких IR алгоритмов включают в себя H. Erdogan, J.A. Fessler, “Monotonic algorithms for transmission tomography”, IEEE Trans. Med. Imag., vol. 18, no. 9, pp. 801-814, 1999 и J.A. Fessler, “Statistical Imaging Reconstruction Methods”, в “Handbook of Medical Imaging Vol. 2: Medical Imaging Processing and Analysis”, SPIE 2000. К сожалению, такие IR алгоритмы в вычислительном отношении дороги вследствие переключения назад и вперед между областью изображения и проекционной областью при каждой итерации алгоритма реконструкции.
Также предлагались алгоритмы устранения шума только в области изображения. Такие алгоритмы были нацелены на улучшение качества изображения, удаляя шум из данных изображения, не возвращаясь к проекционной области. Такие алгоритмы устранения шума в области изображения обычно намного быстрее, чем вышеупомянутые IR алгоритмы, но они не обязательно предоставляют результаты, которые по меньшей мере согласуются с таковыми для IR алгоритмов. Например, часто используемый алгоритм снижения шума на двумерных изображениях представляет собой алгоритм минимизации с полной вариацией, описанный в главе 4.5.5. учебного пособия T. Chan, J. Shen, “Image Processing And Analysis” SIAM 2005). Этот алгоритм эффективен при удалении шума из объема изображения при сохранении краев, но результаты ограничены в соответствии с ограничением полной вариации штрафной функции.
Описываемые здесь аспекты направлены на вышеупомянутые и другие проблемы. В одном аспекте элемент обработки данных изображения включает в себя устройство памяти алгоритма, включающего в себя один или более итерационных алгоритмов устранения шума только в областях изображения на основании минимизации штрафной функции Хьюбера, и процессор, который устраняет шум в данных восстановленного изображения исключительно в области изображения на основании по меньшей мере одного из алгоритмов итерационной минимизации штрафной функции Хьюбера.
В другом аспекте способ включает в себя устранение шума, исключительно в области изображения посредством процессора, в восстановленных данных изображения итерационным алгоритмом устранения шума только в области изображения, который основан на минимизации штрафной функции Хьюбера.
В другом аспекте машиночитаемый носитель данных включает в себя закодированные или загружаемые машиночитаемые команды, которые при выполнении процессором вычислительной системы побуждают процессор: устранять шум посредством процессора и исключительно в области изображения, в данных восстановленного изображения с итерационным алгоритмом устранения шума, который основан на минимизации штрафной функции Хьюбера.
Изобретение может быть реализовано в различных элементах и конфигурациях элементов и в различных этапах и конфигурациях этапов. Чертежи приводятся лишь в целях демонстрации предпочтительных вариантов выполнения и не должны рассматриваться как ограничение изобретения.
Фиг. 1 схематично изображает пример системы визуализации в соединении с элементом обработки данных изображения.
Фиг. 2 - схема примера элемента обработки данных изображения.
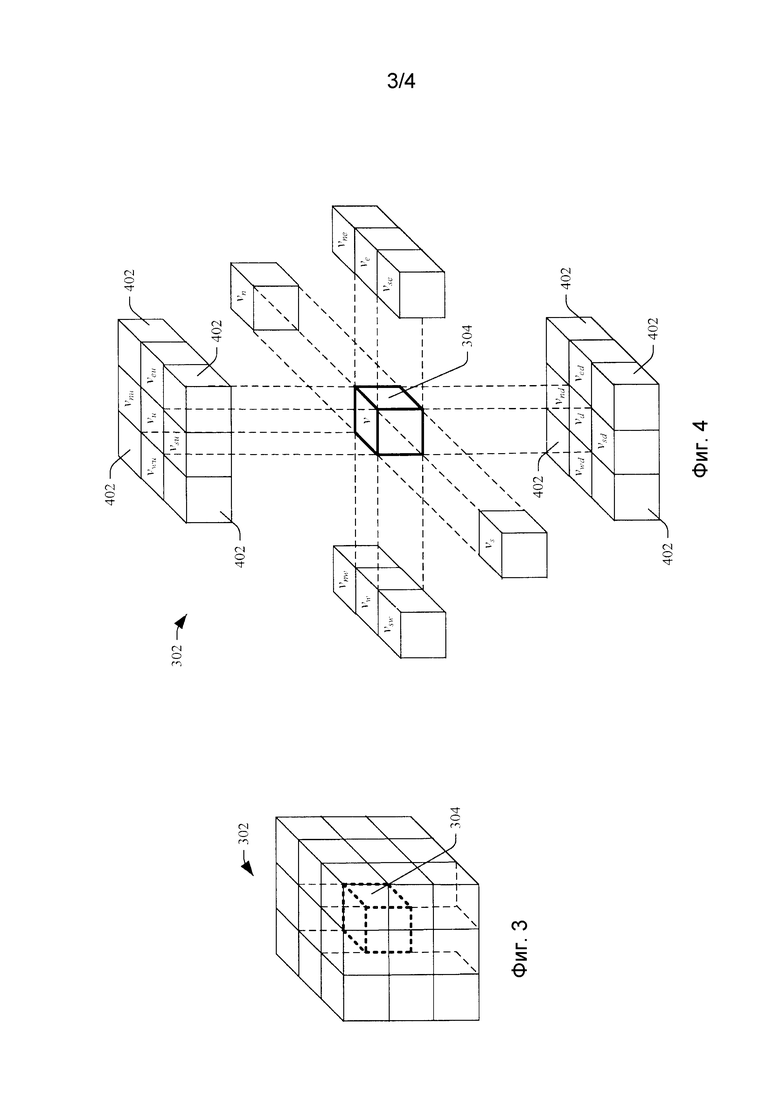
Фиг. 3 и 4 - схема блока вокселя, включающая в себя воксель, в котором устраняют шум, и соседние воксели, используемые для устранения шума в вокселе.
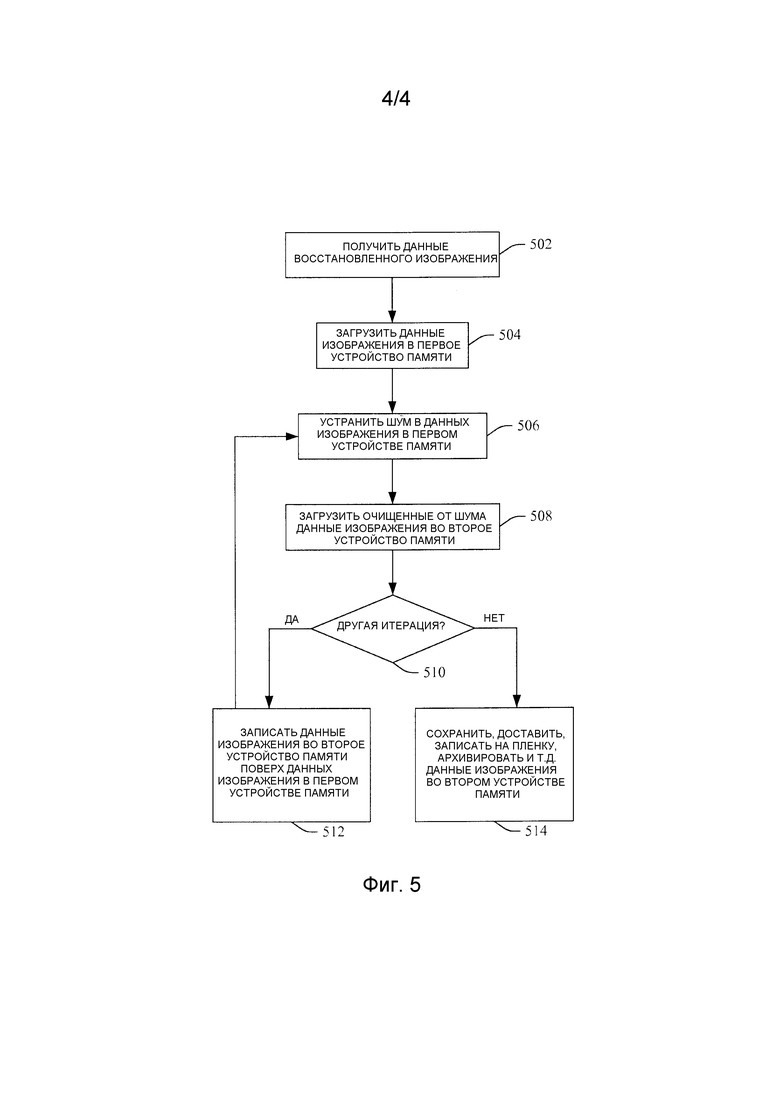
Фиг. 5 - способ устранения шума в данных восстановленного изображения на основании на штрафной функции Хьюбера.
На Фиг. 1 схематично показана система 100 визуализации, подобная компьютерному томографическому (CT) сканеру. Система 100 визуализации включает в себя в общем стационарный гентри 102 и вращающийся гентри 104. Вращающийся гентри 104 имеет возможность поворота при поддержке стационарного гентри 102 и поворачивается относительно обследуемой области 106 вокруг продольной оси, или оси Z.
Источник 110 излучения, такой как рентгеновская трубка, поддерживается при вращении, и вращается с вращающимся гентри 104, и испускает излучение, которое пересекает обследуемую область 106. Одно- или двумерная чувствительная к излучению детекторная матрица 112 стягивает угловую дугу напротив источника 110 излучения поперек обследуемой области 106 и детектирует излучение, пересекающее обследуемую область 106, создавая характеризующие ее проекционные данные.
Устройство 116 восстановления изображения восстанавливает проекционные данные и создает характерные трехмерные (3D) данные объемного изображения. Устройство 116 восстановления изображения может использовать обычный алгоритм восстановления фильтрованной обратной проекции, алгоритм восстановления конического луча, алгоритм итерационного восстановления и/или другой алгоритм восстановления. Поддержка 118 пациента, например кушетка, поддерживает предмет или субъекта, например пациента, в обследуемой области 106.
Универсальная вычислительная система или компьютер служат операторской консолью 120. Процессор консоли 120 выполняет машиночитаемые команды на консоли 126, что позволяет оператору управлять работой системы 100, например, выбором протокола визуализации, включающего в себя протокол радиологического обследования полной дозы или низкой дозы, активизируя устранения шума в данных изображения, инициализируя сканирование, и т.д.
Элемент 122 обработки данных изображения обрабатывает данные восстановленного изображения. Как описано подробнее ниже, в одном случае, элемент 122 использует алгоритм, который итерационно устраняет шум в данных восстановленного изображения в области изображения (то есть без непосредственного проецирования данных изображения в проекционную область), на основании штрафной функции Хьюбера. Это может позволить снижение шума изображения в данных изображения, относительно не затратное в вычислительном отношении, по сравнению с IR алгоритмом с выражением регуляризации Хьюбера, который находит оптимальный объем изображения посредством переключения назад и вперед между проекцией и областями изображения для каждой итерации. Когда проекционные данные первыми очищаются от шума в проекционной области, прежде чем быть восстановленными, очищенные от шума данные восстановленного изображения могут быть близким приближением к объему изображения, произведенному с использованием IR алгоритма с регуляризацией Хьюбера. Следует отметить, что в отличие от алгоритма снижения шума T. Chan, J. Shen, рассмотренного вначале, который является полной вариационной (TV) минимизацией для двумерных (2D) изображений, элемент 122 обработки данных изображения использует трехмерный (3D) алгоритм, который содержит в себе штрафную функцию Хьюбера из IR алгоритмов (а не полную вариационную штрафную функцию).
Дополнительный элемент 124 машинного обучения может быть использован для записи значений одного или более параметров, используемых элементом 122 обработки данных изображения, которые были введены и/или установлены радиологом, технологом и/или другим уполномоченным лицом, и использует эту информацию для рекомендации значений параметра для радиолога, технолога и/или другого уполномоченного лица, и/или для автоматической загрузки рекомендованных значений параметра в элемент 122 обработки данных визуализации для последующего устранения шума в данных изображения. Радиолог, технолог и/или другое уполномоченное лицо могут принять и/или модифицировать одно или более рекомендованных и/или автоматически загруженных значений параметра. Прошлые и/или текущие значения, и/или изменения значений параметров, могут быть визуально отображены, или представлены, например, через графический пользовательский интерфейс (GUI) или иначе, с монитором отображения консоли 120, элементом 122 обработки данных изображения, дополнительным элементом 124 машинного обучения и/или другим устройством. Обычно элемент 124 может использовать алгоритмы, которые позволяют элементу 124 анализировать данные с помощью индуктивного заключения, распознавания образа, классификации, статистики и т.д. из входных данных и предсказать будущие данные на этом основании.
На Фиг. 2 схематично показан пример элемента 122 обработки данных изображения.
Первое устройство 202 памяти используется для сохранения очищаемых от шума данных восстановленного изображения. В одном случае, такие данные изображения представляют собой данные изображения, которые еще не были очищены от шума элементом 122. В другом случае, такие данные изображения представляют собой данные изображения, которые были очищены от шума элементом 122 при одной или более итераций и снова очищаются от шума. В любом случае, в данных изображения может быть предварительно устранен шум в проекционной области и/или в приближении устранения шума в области изображения. Второе устройство 204 памяти используется для сохранения данных изображения, которые были очищены от шума элементом 122 при по меньшей мере одной итерации устранения шума. Следует отметить, что первое и второе устройства 202 и 204 памяти могут быть частью той же самой физической памяти или другой физической памяти.
Микропроцессор или устройство 206 устранения шума итерационно устраняет шум в данных изображения. Это включает в себя устранение шума в данных изображения, сохраняемых в первом устройстве 202 памяти, и сохранение этих очищенных от шума данных изображения во втором устройстве 204 памяти для итерации. Для последующей итерации устройство 206 устранения шума заменяет данные изображения в первом устройстве 202 памяти очищенными от шума данными изображения во втором устройстве 204 памяти и устраняет шум во вновь сохраненных данных изображения (то есть предварительно очищенных от шума данных изображения) в первом устройстве 202 памяти, сохраняя новые очищенные от шума данные изображения во втором устройстве 204 памяти. Когда дополнительные итерации устранения шума не выполняются, очищенные от шума данные изображения сохраняются, и/или переносятся, и/или извлекаются из второго устройства 204 памяти.
Модуль 208 памяти критерия остановки включает в себя один или более нескольких критериев 210 остановки для прекращения устранения шума устройством 206 устранения шума. Примеры подходящего критерия остановки включают в себя, не ограничиваясь, заданное число итераций, заданную допустимую ошибку между данными от последовательных итераций, заданную продолжительность времени и т.д. Такой критерий может быть значением по умолчанию и/или определяемым пользователем и может зависеть от протокола радиологического обследования, от пользователя, от читающего радиолога, от средства визуализации и/или от другой информации.
Модуль 212 памяти алгоритмов включает в себя один или более алгоритмов 214 устранения шума, которые используют устройство 206 устранения шума для устранения шума в данных изображения. Не ограничивающий пример подходящего алгоритма может быть получен из дифференциального уравнения в частных производных, которое показано в УРАВНЕНИИ 1:
где u представляет очищенный от шума объем изображения (то есть решение УРАВНЕНИЯ 1), u0 представляет начальные, очищаемые от шума, зашумленные данные изображения, w представляет статистическое взвешивание, и δ и β представляют подгоночные параметры, символ ∇ обозначает оператор градиента и div - оператор дивергенции. Обычно, выражение  представляет собой выражение штрафной функции шума, которая соответствует штрафной функции Хьюбера, и выражение
представляет собой выражение штрафной функции шума, которая соответствует штрафной функции Хьюбера, и выражение  представляет ограничения на данные изображения.
представляет ограничения на данные изображения.
Не ограничивающий пример подходящего статистического взвешивания w приведен в УРАВНЕНИИ 2:
УРАВНЕНИЕ 2:
где y0 представляет соответствующие проекционные данные, выраженные как число зарегистрированных рентгеновских фотонов, и bp(y0) представляет число обратно спроецированных зарегистрированных рентгеновских фотонов. В УРАВНЕНИИ 2, величина w обратно пропорциональна шуму в изображении, которое может быть получено распространением модели проекционных данных шума в область изображения, используя модифицированную отфильтрованную обратную проекцию или посредством измерения шума из данных изображения.
Обычно, w определяет энергичность устранения шума.
Подгоночные параметры δ и β представляют собой свободные переменные (которые являются строго положительными действительными скалярными величинами), которые могут быть установлены как значения по умолчанию и/или как определяемые пользователем значения, как значения, определяемые элементом 124 машинного обучения, и/или как другие значения, и в некоторых случаях могут быть изменены пользователем и/или компьютером. Параметр δ обычно определяет уровень устранения шума, и параметр β обычно определяет однородность устранения шума (то есть являются ли конечные, очищенные от шума, данные изображения более однородными или находящимися ближе к начальным зашумленным данным u0 изображения). Модуль 216 памяти параметра сохраняет один или более параметров 218, например одну или более переменных δ и β, и/или другой параметр(-ы).
Не ограничивающий пример устранения шума в вокселе данных CT изображения на основании УРАВНЕНИЯ 1 рассматривается ниже в связи с Фиг. 3 и 4.
Следует отметить, что устранение шума может быть распространено, последовательно и/или одновременно, на один или более других вокселей данных изображения. Объем изображения выбирается сеткой объемных элементов (вокселей), и каждый воксель имеет размер dx×dy×dz на единицу длины. На Фиг. 3 показан подблок три на три на три (3×3×3) (или трехмерный (3D)) вокселей 302 данных изображения, включающий в себя воксель 304, в котором устраняют шум, который на Фиг. 3 является вокселем, расположенным в центре подблока вокселей 302. Показанный пример использует подучасток вокселей подблока вокселей 302 при устранении шума в вокселе 304. В других вариантах реализации, воксели в дополнение к, и/или как альтернатива вокселям подблока вокселей 302, включающего в себя двумерный (2D) подблок вокселей, могут быть использованы для обновления вокселя 304 каждой итерации устранения шума.
На Фиг. 4 показано элементное изображение подблока вокселей 302. На Фиг. 4 воксель 304 обозначается v и имеет координаты ui,j,k, и соседние воксели, используемые в этом примере для устранения шума, идентифицированы как:

 и
и  где n, s, e, w, u и d представляют относительные положения, соответствующие северу, югу, востоку, западу, верху и низу относительно вокселя v. Поскольку обновленная схема может включать в себя воксели с индексами, которые выходят за пределы, воксели в этих местоположениях экстраполируются или заполняются. Угловые воксели 402 не используются в этом примере для устранения шума, но могут быть использованы в других вариантах реализации.
где n, s, e, w, u и d представляют относительные положения, соответствующие северу, югу, востоку, западу, верху и низу относительно вокселя v. Поскольку обновленная схема может включать в себя воксели с индексами, которые выходят за пределы, воксели в этих местоположениях экстраполируются или заполняются. Угловые воксели 402 не используются в этом примере для устранения шума, но могут быть использованы в других вариантах реализации.
Для этого примера, УРАВНЕНИЕ 1 дискретизируется на основании УРАВНЕНИЯ 3:
УРАВНЕНИЕ 3:

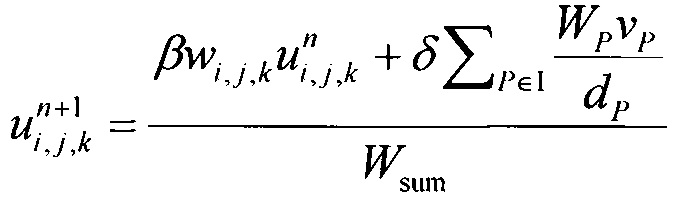
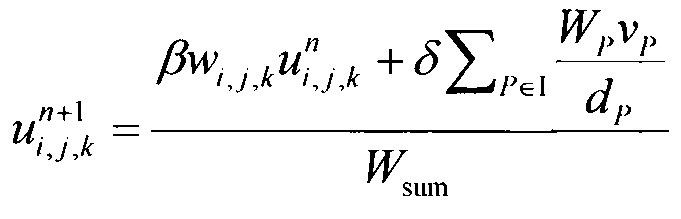
и решается для обновленного выражения  для вокселя v, как показано в УРАВНЕНИИ 4:
для вокселя v, как показано в УРАВНЕНИИ 4:
УРАВНЕНИЕ 4:
где n+l представляет итерацию устранения шума (от n=0 до Niter, что является максимальным числом итераций),  представляет воксель, в котором устраняется шум, δ и β таковы, как определено выше и, соответственно, представляют параметр степени устранения шума и параметр однородности устранения шума, =n, s, e, w, u и d, P представляют индекс, vP представляет соседние воксели, WP представляет веса для соседних вокселей, Wsum представляет сумму весов WP и dP представляет размер вокселя в данном направлении: dn и ds=dx, dw и de=dy и du и dd=dz.
представляет воксель, в котором устраняется шум, δ и β таковы, как определено выше и, соответственно, представляют параметр степени устранения шума и параметр однородности устранения шума, =n, s, e, w, u и d, P представляют индекс, vP представляет соседние воксели, WP представляет веса для соседних вокселей, Wsum представляет сумму весов WP и dP представляет размер вокселя в данном направлении: dn и ds=dx, dw и de=dy и du и dd=dz.
Значение Wsum может быть определено так, как показано в УРАВНЕНИИ 5:
УРАВНЕНИЕ 5:
и WP может быть определено так, как показано в УРАВНЕНИИ 6:
УРАВНЕНИЕ 6:
DP может быть определено так, как показано в УРАВНЕНИЯХ 7-12:
УРАВНЕНИЕ 7:

УРАВНЕНИЕ 8:

УРАВНЕНИЕ 9:

УРАВНЕНИЕ 10:

УРАВНЕНИЕ 12:

УРАВНЕНИЕ 13:

Другие подходы к вычислению Wsum, WP и/или DP также предполагаются в настоящем документе.
Устройство 206 устранения шума использует УРАВНЕНИЕ 4 каждой итерации для устранения шума в вокселе 304. В этом примере устройство 206 устранения шума устраняет шум с использованием УРАВНЕНИЯ 4, пока не будет достигнуто значение Niter. Следует отметить, что устранение шума также может быть закончено на основании заданной ошибки между последовательными наборами данных изображения, истечения заданного времени, посредством ручного прерывания пользователем и/или иначе.
На Фиг. 5 показан примерный способ устранения шума в восстановленных данных изображения на основании минимизации штрафной функции Хьюбера.
Следует отметить, что порядок действий в описанных здесь способах не ограничен. Другие порядки действий также здесь предполагаются. Кроме того, одно или более действий могут быть опущены и/или одно или более дополнительных действий могут быть включены.
На этапе 502 получаются данные восстановленного изображения.
На этапе 504 данные восстановленного изображения загружаются в первое устройство 202 памяти.
На этапе 506 в данных восстановленного изображения в первом устройстве 202 памяти устраняют шум на основании УРАВНЕНИЯ 4, как описано здесь. Это может быть сделано на каждом вокселе, последовательно или параллельно.
На этапе 508 очищенные от шума данные изображения сохраняются во втором устройстве 204 памяти.
На этапе 510 определяется, выполняется ли другая итерация устранения шума. Как описано здесь, критерии остановки могут быть основанными на одном или более заданных числах итераций, истечении заданного периода времени и т.д.
Если так, то на этапе 512 очищенные от шума данные изображения во втором устройстве 204 памяти записываются поверх данных изображения в первом устройстве 202 памяти, и действия 506-510 повторяются.
Если нет, то на этапе 514 очищенные от шума данные изображения отображаются, переносятся на другое устройство, записываются на пленку, архивируются и т.д.
Все вышеупомянутое может быть осуществлено с помощью процессора, выполняющего одну или более машиночитаемых команд, закодированных или введенных в машиночитаемый носитель данных, например физическую память. Такой процессор может быть частью элемента 122 обработки данных изображения, консоли 120 и/или другого вычислительного устройства. В качестве дополнения или альтернативы процессор может выполнить по меньшей мере одну из машиночитаемых команд, переносимую несущим сигналом, сигналом или другим не машиночитаемым носителем данных, таким как среда переноса данных.
Изобретение было описано в отношении предпочтительных вариантов реализации. После чтения и понимания приведенного подробного описания могут быть предусмотрены изменения и вариации. Предполагается, что изобретение включает в себя все такие изменения и вариации, поскольку они находятся в пределах объема приложенной формулы изобретения или их эквивалентов.


Изобретение относится к области устранения шума в данных изображения. Технический результат – обеспечение устранения шума в данных изображения. Элемент обработки данных восстановленного объемного изображения от формирующего изображение сканера содержит: память алгоритмов, включающую в себя один или более итерационных алгоритмов устранения шума только в области изображения на основании минимизации штрафной функции Хьюбера; процессор, устраняющий шум в данных восстановленного объемного изображения исключительно в области изображения на основании одного из алгоритмов итерационной минимизации штрафной функции Хьюбера, который включает в себя первый параметр, который является свободной переменной и в первом выражении определяет уровень устранения шума, и второй параметр, который является свободной переменной и во втором выражении определяет однородность устранения шума; при этом алгоритм включает в себя первое выражение, которое основано на минимизации штрафной функции Хьюбера и которое включает в себя произведение первого параметра и взвешенной суммы соседних вокселей по отношению к вокселю, отрегулированному в отношении размера, который определяет уровень устранения шума. 2 н. и 12 з.п. ф-лы, 5 ил.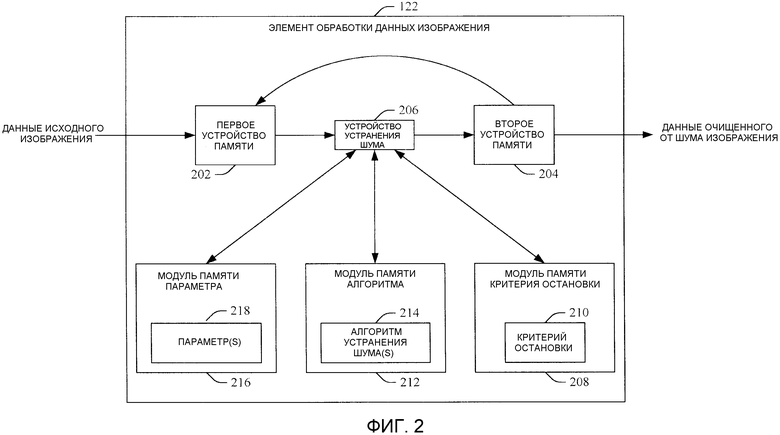
1. Элемент (122) обработки данных изображения для обработки данных восстановленного объемного изображения от формирующего изображение сканера, содержащий:
память (212) алгоритмов, включающую в себя один или более итерационных алгоритмов (214) устранения шума только в области изображения на основании минимизации штрафной функции Хьюбера;
процессор (206), который устраняет шум в данных восстановленного объемного изображения исключительно в области изображения на основании одного из алгоритмов итерационной минимизации штрафной функции Хьюбера, который включает в себя первый параметр, который является свободной переменной и в первом выражении определяет уровень устранения шума, и второй параметр, который является свободной переменной и во втором выражении определяет однородность устранения шума; и
при этом по меньшей мере один алгоритм включает в себя первое выражение, которое основано на минимизации штрафной функции Хьюбера и которое включает в себя произведение первого параметра и взвешенной суммы соседних вокселей по отношению к вокселю, отрегулированному в отношении размера, который определяет уровень устранения шума.
2. Элемент обработки данных изображения по п. 1, в котором значения первого параметра и второго параметра являются строго положительными скалярными величинами, определяемыми из пользовательского ввода.
3. Элемент обработки данных изображения по п. 1, в котором по меньшей мере один алгоритм одновременно устраняет шум в отдельных вокселях.
4. Элемент обработки данных изображения по п. 1, в котором по меньшей мере один алгоритм включает в себя функцию, которая устраняет шум в вокселе в данных восстановленного изображения посредством
 ,
,
где n+1 представляет итерацию устранения шума,  представляет воксель, в котором устраняется шум, δ является первым параметром, β является вторым параметром, I = n, s, е, w, u и d, которые представляют трехмерные относительные положения по отношению к вокселю, в котором устраняется шум, wi,j,k представляет статистическое взвешивание, Р представляет индекс, vP представляет соседние воксели, WP представляет веса для соседних вокселей, Wsum представляет сумму весов WP и dP представляет размер вокселя в данном направлении: dn и ds=dx, dw и de=dy и du и dd=dz.
представляет воксель, в котором устраняется шум, δ является первым параметром, β является вторым параметром, I = n, s, е, w, u и d, которые представляют трехмерные относительные положения по отношению к вокселю, в котором устраняется шум, wi,j,k представляет статистическое взвешивание, Р представляет индекс, vP представляет соседние воксели, WP представляет веса для соседних вокселей, Wsum представляет сумму весов WP и dP представляет размер вокселя в данном направлении: dn и ds=dx, dw и de=dy и du и dd=dz.
5. Элемент обработки данных изображения по п. 1, дополнительно включающий в себя элемент машинного обучения, который определяет по меньшей мере одно рекомендованное значение первого и второго параметров.
6. Элемент обработки данных изображения по п. 1, в котором по меньшей мере один алгоритм включает в себя суммирование первого и второго выражений и первое выражение является произведением первого параметра и взвешенной суммы соседних вокселей по отношению к вокселю, отрегулированному в отношении размера, и второе выражение является произведением второго параметра и предыдущего значения упомянутого вокселя.
7. Элемент обработки данных изображения по любому из пп. 1-3, в котором процессор итерационно устраняет шум в данных восстановленного объемного изображения, пока не будет достигнуто одно из заданных чисел итераций, не истечет заданный период времени или не будет удовлетворена заданная допустимая ошибка для разностного значения между данными, произведенными последовательными итерациями.
8. Элемент обработки данных изображения по любому из пп. 1-3, в котором упомянутый по меньшей мере один алгоритм не проецирует вперед данные восстановленного объемного изображения в проекционную область для любой итерации устранения шума.
9. Элемент обработки данных изображения по любому из пп. 1-3, в котором данные восстановленного объемного изображения создаются с проекционными данными, очищенными от шума исключительно в проекционной области.
10. Способ обработки данных изображения, содержащий этапы, на которых:
устраняют шум исключительно в области изображения посредством процессора (206) в данных восстановленного объемного изображения итерационным алгоритмом (214) устранения шума только в области изображения, который основан на минимизации штрафной функции Хьюбера, который включает в себя первый параметр, который является свободной переменной и в первом выражении определяет уровень устранения шума, и второй параметр, который является свободной переменной и во втором выражении определяет однородность устранения шума; и
при этом первое выражение включает в себя произведение первого параметра и взвешенной суммы соседних вокселей по отношению к вокселю, отрегулированному в отношении размера, который определяет уровень устранения шума.
11. Способ по п. 10, дополнительно содержащий этап, на котором устраняют шум в данных восстановленного изображения на основе отдельных вокселей.
12. Способ по п. 10, в котором по меньшей мере один алгоритм включает в себя функцию, которая устраняет шум в вокселе в данных восстановленного изображения посредством
 ,
,
где n+1 представляет итерацию устранения шума,  представляет воксель, в котором устраняется шум, δ является первым параметром, β является вторым параметром, I=n, s, е, w, u и d, которые представляют трехмерные относительные положения по отношению к вокселю, в котором устраняется шум, wi,j,k представляет статистическое взвешивание, Р представляет индекс, vP представляет соседние воксели, WP представляет веса для соседних вокселей, Wsum представляет сумму весов WP и dP представляет размер вокселя в данном направлении: dn и ds=dx, dw и de=dy и du и dd=dz.
представляет воксель, в котором устраняется шум, δ является первым параметром, β является вторым параметром, I=n, s, е, w, u и d, которые представляют трехмерные относительные положения по отношению к вокселю, в котором устраняется шум, wi,j,k представляет статистическое взвешивание, Р представляет индекс, vP представляет соседние воксели, WP представляет веса для соседних вокселей, Wsum представляет сумму весов WP и dP представляет размер вокселя в данном направлении: dn и ds=dx, dw и de=dy и du и dd=dz.
13. Способ по п. 11, дополнительно содержащий этап, на котором параллельно устраняют шум в двух или более из отдельных вокселей.
14. Способ по п. 11, дополнительно содержащий этап, на котором устраняют шум в упомянутом отдельном вокселе на основании заданного набора соседних вокселей.
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| ABDEL DOUIRI et al., "Enhanced detection in CT Colonoscopy using adaptive diffusion filtering", 2009, 5 c | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| СПОСОБ АДАПТИВНОГО УЛУЧШЕНИЯ ФАКСИМИЛЬНЫХ ИЗОБРАЖЕНИЙ ДОКУМЕНТОВ | 2008 |
|
RU2365993C1 |

