Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству для управления перегрузочным устройством на уборочной машине, причем перегрузочное устройство расположено на небольшом расстоянии от части или элемента корпуса уборочной машины с возможностью поворота вокруг вертикальной оси, а также с возможностью поворота вокруг горизонтальной оси для изменения его высотной установки, при этом устройство содержит средства ограничения области поворота, которые ограничивают максимальную допустимую область поворота перегрузочного устройства вокруг вертикальной оси в направлении части или элемента корпуса во избежание столкновения с элементом корпуса. Кроме того, изобретение относится также к уборочной машине, оснащенной таким устройством, и к соответствующему способу управления перегрузочным устройством на уборочной машине.
Уровень техники
Самоходные уборочные машины, такие как полевые измельчители, зерноуборочные комбайны, машины для уборки сахарной свеклы и подобные агрегаты, обычно оснащены перегрузочным устройством, например выгрузным или разгрузочным отводом, разгрузочной трубой зернового бункера, конвейерной цепью, транспортерной лентой, с помощью которых убранная масса перегружается из уборочной машины на транспортное средство. В тех случаях, когда убираемая масса во время уборки должна перегружаться непрерывно в процессе уборки, как это необходимо, например, при работе полевого измельчителя, транспортное средство должно следовать параллельно рядом с уборочной машиной или за ней во время рабочего движения. При этом перегрузочное устройство может быть позиционировано путем поворота вокруг вертикальной и горизонтальной оси таким образом, что выбрасываемый или выходящий поток убранной массы падает в желаемое место на транспортном средстве.
Известна, например, пневматическая зерноуборочная машина по патенту RU 2097959 от 10.12.1997 г., в которой зерновой элеватор сообщается с выгрузным шнеком, закрепленным на раме шарниром с возможностью отклонения в горизонтальной плоскости на 90°.
Известно также устройство для управления перегрузочным устройством на уборочной машине по заявке на выдачу патента РФ №99122213, опубл. 27.10.2001. В этом документе описано перегрузочное устройство, расположенное поблизости корпуса уборочной машины с возможностью поворота вокруг вертикальной оси, а также с возможностью поворота вокруг горизонтальной оси для изменения его высотного положения. Указанное устройство содержит также средства ограничения области поворота, которые ограничивают максимальную допустимую область поворота перегрузочного устройства вокруг вертикальной оси в направлении корпуса во избежание столкновения с корпусом. Это устройство является наиболее близким к заявляемому и принято в качестве прототипа. В этом же документе раскрыт наиболее близкий способ управления вышеописанным перегрузочным устройством на уборочной машине, в котором определяют максимальную допустимую область поворота перегрузочного устройства вокруг вертикальной оси в направлении корпуса и осуществляют регулирование поворота.
За счет поворота вокруг горизонтальной оси координируют высотное положение перегрузочного устройства в соответствии с различной высотой транспортных средств, а также компенсируют увеличение высоты слоя убранной массы в транспортном средстве. За счет поворота вокруг вертикальной оси перегрузочное устройство переводят из транспортного положения, в котором оно ориентировано назад и уложено на транспортном седле, в соответствующее боковое рабочее положение при параллельном движении уборочной машины и транспортного средства. В этих случаях при уборке поля рядами или полосами перегрузочное устройство должно периодически разворачиваться вправо или влево, так как транспортное средство должно всегда следовать по уже убранному участку поля и, соответственно, находиться то справа, то слева от уборочной машины. Кроме того, поворот перегрузочного устройства вокруг вертикальной оси используется для равномерной загрузки транспортного средства. Когда транспортное средство в одной позиции достаточно заполнено, водитель уборочной машины может повернуть перегрузочное устройство таким образом, чтобы поток убранной массы падал в другое место в транспортном средстве.
Поворот вокруг вертикальной оси обычно производится с помощью турели или поворотного круга, посредством которого перегрузочное устройство связано с уборочной машиной. Однако в большинстве уборочных машин невозможен полный поворот перегрузочного устройства по всему кругу, так как такие части и элементы машины как, например, кабина водителя, выступают вверх выше плоскости поворотного круга. Для того чтобы избежать столкновения с частями корпуса машины, в известных уборочных машинах на поворотном круге имеются механические упоры, которые своевременно останавливают поворотное движение перегрузочного устройства вокруг вертикальной оси перед элементами корпуса.
Это ограничение области поворота особенно неблагоприятно для полевых измельчителей, в которых перегрузочное устройство обычно представляет собой разгрузочную трубу, расположенную на близком расстоянии за кабиной водителя. Из-за этого близкого расположения перегрузочного устройства за кабиной водителя область поворота перегрузочного устройства в таких машинах, как правило, не превышает 190°. Это означает, что разгрузочная труба может поворачиваться, по существу, только в задней области полевого измельчителя и выходить за ее пределы вперед максимум на 10° от перпендикулярного машине положения. Это резкое ограничение области поворота перегрузочного устройства ведет к затруднению наблюдения со стороны водителя за перегрузочным устройством. Для наблюдения за перегрузочным устройством и управления им водитель должен направлять взгляд на область перегрузки. С другой стороны, он должен постоянно наблюдать за областью приема убранной массы в направлении движения. Для этого при параллельном следовании водитель переводит перегрузочное устройство предпочтительно в положение как можно ближе к задней стенке кабины, то есть к переднему упору. При этом обе подлежащие наблюдению области наиболее приближены друг к другу. Однако при той максимальной области поворота, которая возможна в настоящее время, расстояние между областями наблюдения остается слишком большим, так что водитель должен постоянно поворачивать голову или использовать зеркало, установленное соответствующим образом.
Поскольку конструктивные параметры и расположение разгрузочной трубы на полевом измельчителе предварительно заданы по критериям оптимального потока убранной массы, эти параметры не так просто могут быть изменены для расширения области поворота. Это же относится к изменению положения кабины водителя, и в особенности нежелательно уменьшение высоты или глубины кабины, так как это ухудшало бы условия работы водителя или вело бы к другим недостаткам.
Сущность изобретения
Соответственно, задачей, на решение которой направлено изобретение, является создание устройства и способа управления перегрузочным устройством на уборочной машине указанного типа, которые обеспечивают для водителя комфортные условия управления и наблюдения за перегрузочным устройством, а также уборочной машины с таким устройством.
В соответствии с изобретением решение поставленной задачи обеспечивается за счет устройства согласно пункту 1 формулы изобретения и способа согласно пункту 14 формулы изобретения, а также уборочной машины по п.13.
В предлагаемом устройстве для управления перегрузочным устройством на уборочной машине, в котором перегрузочное устройство расположено на расстоянии вблизи элемента корпуса уборочной машины с возможностью поворота вокруг вертикальной оси и вокруг горизонтальной оси для изменения его высотного положения, при этом указанное устройство содержит средства ограничения области поворота, которые ограничивают максимальную допустимую область поворота перегрузочного устройства вокруг вертикальной оси в направлении элемента корпуса во избежание столкновения с этим элементом корпуса, согласно изобретению средства ограничения области поворота выполнены и/или расположены с возможностью определения допустимой области поворота в зависимости от высотного положения перегрузочного устройства.
Соответственно, способ согласно изобретению предусматривает, что в устройстве для управления перегрузочным устройством вышеуказанного типа допустимую область поворота определяют в зависимости от высотного положения перегрузочного устройства.
При этом в соответствии с изобретением, в отличие от известных решений уровня техники, не предусмотрена максимальная область поворота, общая для всех высотных положений перегрузочного устройства. Вместо этого допустимая область поворота изменяется в зависимости от действительного или мгновенного высотного положения перегрузочного устройства. При этом область поворота может быть точно скоординирована с формой части корпуса, препятствующей свободному повороту, и с формой перегрузочного устройства и расширена по меньшей мере в определенных высотных положениях перегрузочного устройства. За счет этого водитель может при адекватно выбранном высотном положении повернуть перегрузочное устройство дальше вперед в пределах предварительно заданных для этого положения границ области поворота, например даже в положение над крышей кабины.
При этом перегрузочное устройство может быть выполнено из нескольких секций, соединенных между собой посредством горизонтальных осей. В этом случае расширение области поворота может осуществляться путем индивидуальной регулировки высотного положения отдельных секций.
За счет данных расширенных возможностей регулировки снижается нагрузка водителя при управлении и наблюдении за областью перегрузки. Кроме того, за счет более широкой области поворота возможно более гибкое приспособление перегрузочного устройства к параллельно следующему транспортному средству.
Изобретение дает особые преимущества при использовании на полевых измельчителях. В этих машинах, с одной стороны, несмотря на узкое расстояние между разгрузочной трубой и кабиной водителя, за счет криволинейной формы разгрузочной трубы в определенных высотных положениях разгрузочной трубы возможно значительное расширение области поворота. С другой стороны, именно в этих машинах требуется непрерывная перегрузка убранной массы в транспортное средство, так как они в отличие от зерноуборочных комбайнов не имеют промежуточных емкостей для хранения убранной массы. Кроме того, изобретение может использоваться с получением преимуществ также и во всех других уборочных машинах с соответствующим поворотным перегрузочным устройством и частями корпуса, выступающими в область его поворота.
В зависимых пунктах формулы изобретения защищены особенно предпочтительные примеры выполнения и модификации.
В одном особенно предпочтительном примере выполнения средства ограничения области поворота выполнены и/или расположены таким образом, что перегрузочное устройство при повороте в направлении части или элемента корпуса за пределы максимальной допустимой области поворота, установленной для определенного высотного положения, автоматически поворачивается по меньшей мере вокруг одной горизонтальной оси, то есть в определенных примерах выполнения также по секциям, в вертикальном направлении в более высокое положение. Это означает, что поворотное движение перегрузочного устройства не останавливается по достижении граничного угла данной максимальной области поворота. Вместо этого допускается поворот за пределы области поворота, соответствующей исходному положению перегрузочного устройства, но при этом одновременно перегрузочное устройство поворачивается выше таким образом, что выдерживаются границы области поворота, соответствующие данным отдельным высотным положениям, и надежно устраняется риск столкновения с частью корпуса. В тех случаях, когда он при достижении текущих границ области поворота для водителя желателен дальнейший поворот вперед, водитель не должен предварительно вручную производить регулировку в другое высотное положение, а должен только с помощью обычного пользовательского интерфейса задать желаемое поворотное движение вокруг вертикальной оси, и требуемая для этого поворотного движения регулировка высотного положения производится полностью автоматически.
В этом примере выполнения средства ограничения области поворота могут быть выполнены и/или расположены таким образом, что при увеличении высотного положения перегрузочного устройства максимальная допустимая область поворота расширяется непрерывно. В альтернативном варианте при увеличении высотного положения перегрузочного устройства максимальная допустимая область поворота может расширяться ступенчато. Соответственно, автоматический подъем перегрузочного устройства при повороте к ограничивающей область поворота части корпуса может производиться как непрерывно, так и таким образом, что поворотное движение вокруг вертикальной оси периодически прерывается, после чего перегрузочное устройство вначале автоматически поднимается в более высокое положение и затем продолжает поворачиваться вокруг вертикальной оси с дальнейшим повторением этих циклов.
В одном из наиболее экономичных примеров выполнения устройство снабжено средствами для определения величины, которая представляет высотное положение перегрузочного устройства. Они могут представлять собой датчики на перегрузочном устройстве, которые в зависимости от высотного положения вырабатывают соответствующий сигнал. Эти средства могут также представлять собой запоминающее устройство или промежуточное запоминающее устройство, предназначенное для того, чтобы регистрировать и временно записывать управляющие команды или соответствующие сигналы регулировки, задающие определенное положение. Кроме того, устройство снабжено пользовательским интерфейсом для создания управляющей команды для поворота разгрузочного устройства вокруг вертикальной оси. И наконец, устройство содержит устройство управления, которое на основе величины высотного положения определяет граничные величины соответствующей ей максимальной допустимой области поворота и на основе управляющей команды с учетом определенных граничных величин области поворота выдает сигнал регулировки на регулировочное устройство для соответствующего поворота перегрузочного устройства вокруг вертикальной оси. При этом устройство управления образует "электронный упор", который при достижении граничных величин области поворота останавливает поворотное движение, то есть оно больше не выдает на регулировочное устройство сигнала регулировки для поворота вокруг вертикальной оси, а вместо этого, например, сигнализирует водителю о достижении границы области поворота.
В особенно предпочтительном варианте этого примера выполнения устройство управления дополнительно снабжено средствами, предназначенными для того, чтобы в этом случае выдавать дальнейший сигнал на регулировочное устройство для поворота перегрузочного устройства вокруг горизонтальной оси для перевода перегрузочного устройства в другое высотное положение с большей областью поворота. При этом перегрузочное устройство поворачивается вверх до тех пор, пока оно не достигнет высотного положения с достаточной областью поворота или пока не будет исчерпана возможность расширения области поворота путем регулировки высотного положения. В качестве альтернативы устройство управления может также после того, как определен угол поворота вокруг вертикальной оси в соответствии с управляющей командой, произвести поиск подходящего высотного положения, в котором этот угол поворота лежит в пределах граничных величин области поворота. В этом случае производится непосредственная регулировка для установки перегрузочного устройства в это оптимальное высотное положение.
Устройство управления может быть выполнено, например, в виде программного обеспечения в вычислительном блоке устройства по изобретению, предназначенного для управления перегрузочным устройством.
Помимо такого чисто электронного осуществления изобретения, возможно также выполнение устройства в основном механическими средствами.
Для этого средства ограничения области поворота могут содержать, например, кулису, например, с подъемным скосом, а также взаимодействующее с ней контактное устройство. Тогда, по меньшей мере в тех случаях, когда перегрузочное устройство находится в одной определенной области высотных положений, при повороте перегрузочного устройства вокруг вертикальной оси это контактное устройство перемещается по меньшей мере вдоль участка кулисы. За счет перемещения контактного устройства вдоль кулисы перегрузочное устройство в определенных областях поворота при повороте вокруг вертикальной оси в направлении элемента корпуса принудительно поворачивается также вверх вокруг горизонтальной оси.
Это может осуществляться чисто механическим путем. В этом примере на корпусе машины в концевых областях максимальной области поворота, например, справа и слева за кабиной водителя, вместо известных неподвижных упоров расположены подъемные скосы. На них наезжают жестко укрепленные на перегрузочном устройстве контактные или упорные элементы, такие как ролики, пальцы и подобные элементы, и принудительно поднимают вверх перегрузочное устройство механическим путем. В качестве примера контактные или упорные элементы могут быть расположены на укрепленном на уборочной машине конце гидроцилиндра, который предназначен для поворота перегрузочного устройства вокруг горизонтальной оси и известен сам по себе.
Однако в целях повышения устойчивости, в особенности для устранения колебаний перегрузочного устройства вокруг горизонтальной оси, предпочтительно использование регулировочного устройства, которое обычно применяется для поворота. Для этого контактное устройство содержит соответствующий управляющий элемент, например гидравлический клапан или потенциометр, связанный с контактным элементом, который перемещается вдоль кулисы.
В другом примере выполнения средства ограничения области поворота при установке отличной (другой), более широкой области поворота содержат несколько ступенчато расположенных механических упоров и/или концевых выключателей. Расположение этих упоров и/или концевых выключателей выбрано таким образом, что перегрузочное устройство при повороте вокруг вертикальной оси в направлении части или элемента корпуса в различных отрегулированных высотных положениях движется до упорного контакта с различными упорами и/или концевыми выключателями.
При этой модификации также возможен автоматический поворот перегрузочного устройства в более высокое положение при достижении границ области поворота. Для этого, например, часть концевого выключателя связана с регулировочным устройством для поворота перегрузочного устройства вокруг горизонтальной оси. При повороте перегрузочного устройства до упорного контакта с концевым выключателем приводится в действие регулировочное устройство для поворота вокруг горизонтальной оси, и перегрузочное устройство поворачивается вверх на определенную величину.
В особенно предпочтительном примере выполнения перегрузочное устройство снабжено регулируемой отбойной заслонкой или разгрузочным дефлектором на своей разгрузочной стороне, то есть на удаленном от уборочной машины конце. Такие разгрузочные дефлекторы обычно монтируются на конце разгрузочной трубы полевого измельчителя. За счет отрегулированной установки разгрузочного дефлектора регулируется дальность разгрузки, то есть расстояние между входным концом разгрузочной трубы и точкой падения потока убранной массы на транспортное средство. Если разгрузочный дефлектор поворачивают вниз, дальность разгрузки становится меньше при том же отрегулированном высотном положении разгрузочной трубы, чем при повернутом вверх разгрузочном дефлекторе.
Задача изобретения решена также в устройстве для управления перегрузочным устройством, расположенным на уборочной машине с возможностью поворота вокруг вертикальной и/или горизонтальной оси и снабженным на своей разгрузочной стороне разгрузочным дефлектором, причем оно содержит средства управления, предназначенные для того, чтобы при повороте перегрузочного устройства вокруг вертикальной и/или горизонтальной оси автоматически управлять разгрузочным дефлектором таким образом, что расстояние перегрузки, отрегулированное перед поворотом, остается постоянным.
В данном варианте средства управления обеспечивают при повороте перегрузочного устройства вокруг вертикальной и/или горизонтальной оси автоматическое управление разгрузочным дефлектором в зависимости от достигаемого высотного положения и достигаемого угла поворота относительно вертикальной оси таким образом, чтобы расстояние перегрузки, отрегулированное перед поворотом, оставалось постоянным. При этом под термином "расстояние перегрузки" имеется в виду расстояние между точкой падения потока убранной массы, лежащей в определенной горизонтальной плоскости падения, например точкой падения в пределах плоскости, заданной кромками бортов транспортного средства, и линией, проходящей через вертикальную ось поворота перегрузочного устройства в продольном направлении, то есть в направлении движения уборочной машины.
Соответственно, задача изобретения решена в способе управления перегрузочным устройством, расположенным на уборочной машине с возможностью поворота вокруг вертикальной и/или горизонтальной оси и снабженным на своей разгрузочной стороне разгрузочным дефлектором, причем согласно изобретению при повороте перегрузочного устройства вокруг вертикальной и/или горизонтальной оси регулируют положение разгрузочного дефлектора таким образом, что расстояние перегрузки, отрегулированное перед поворотом, остается постоянным.
За счет такого управления разгрузочным дефлектором обеспечивается тот эффект, что, несмотря на высотную регулировку и или поворот перегрузочного устройства вокруг вертикальной оси, точка падения остается на линии, проходящей параллельно уборочной машине. При этом надежно устраняется риск того, что при повороте перегрузочного устройства вперед, в особенности в сочетании с его подъемом над кабиной, поток убранной массы начнет внезапно падать мимо транспортного средства. Следовательно, водитель может комфортным образом путем ввода простой команды достигнуть поворота вперед без необходимости одновременно точно контролировать точку падения и производить координирующую регулировку других параметров, в особенности регулировку положения разгрузочного дефлектора, для попадания потока убранной массы в транспортное средство.
Такое устройство с автоматической регулировочной подстройкой разгрузочного дефлектора при повороте перегрузочного устройства вокруг вертикальной и/или горизонтальной оси с обеспечением постоянного расстояния перегрузки, отрегулированного перед поворотом, даже независимо от предусмотренного изобретением расширения области поворота, дает общее преимущество в том, что значительно снижает нагрузку на водителя. Дополнительное преимущество состоит в снижении до минимума потерь убранной массы.
Для того, чтобы обеспечить водителю уборочной машины возможность независимо от предусмотренной автоматической регулировки производить любую установку отдельных регулировочных устройств, и в частности изменять также расстояние перегрузки, предпочтительно предусмотрена возможность отключения всех функций автоматической регулировки или наложения на них приоритетного ручного регулирования.
Задача изобретения решена также в уборочной машине с поворотно-установленным на ней перегрузочным устройством, оснащенной устройством для управления перегрузочным устройством, описанным выше.
Перечень Фигур чертежей
Примеры осуществления настоящего изобретения будут подробнее описаны ниже со ссылками на прилагаемые чертежи, на которых:
фиг.1 изображает на виде сверху полевой измельчитель с параллельно движущимся транспортным средством в процессе уборки,
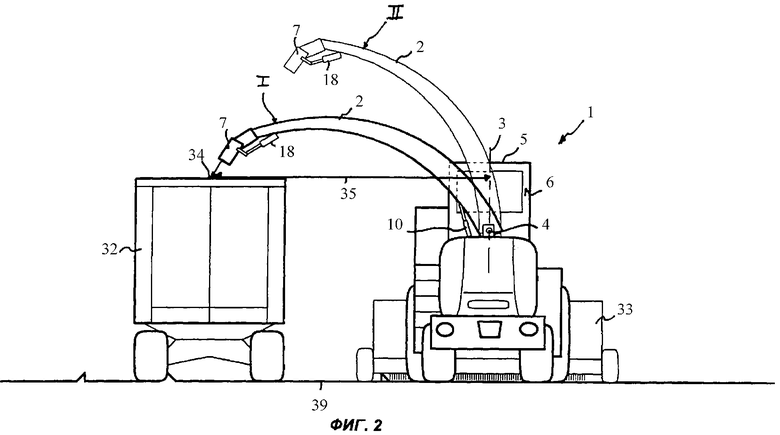
фиг.2 изображает на виде сзади полевой измельчитель и транспортное средство,
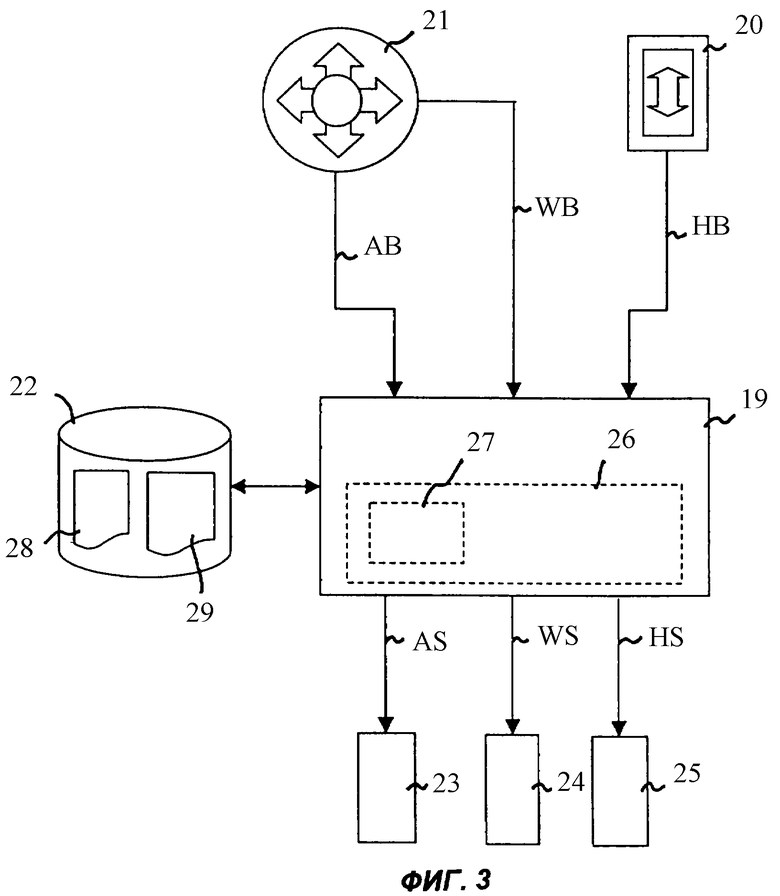
фиг.3 изображает блок-схему существенных компонентов в электронном примере выполнения устройства в соответствии с изобретением, предназначенного для управления разгрузочной трубой,
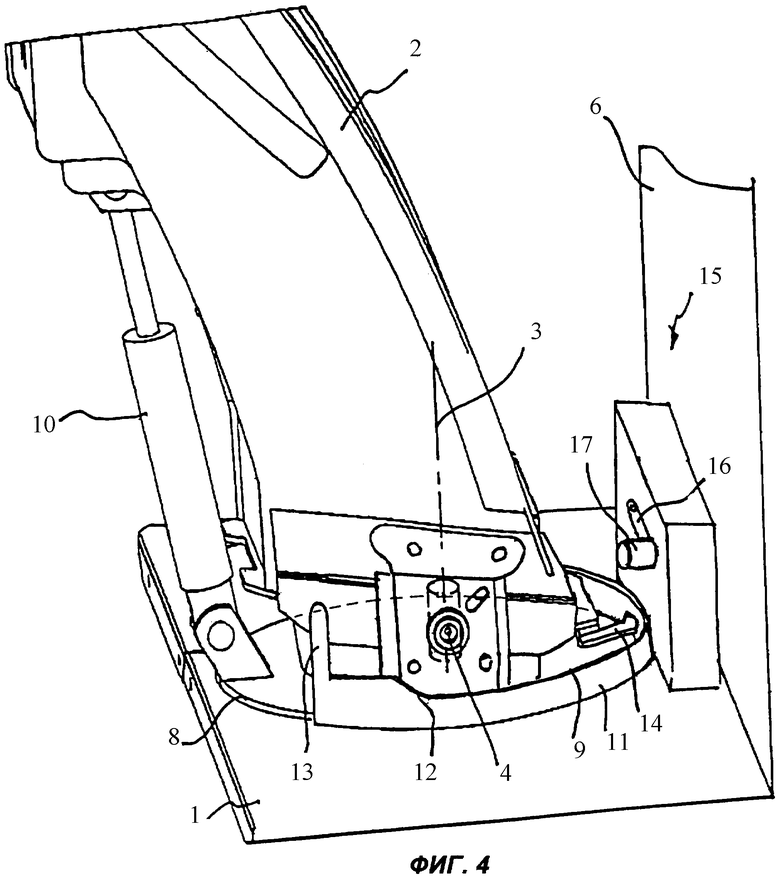
фиг.4 подробно изображает на виде в перспективе сбоку разгрузочную трубу полевого измельчителя в области поворотного круга и устройство управления в соответствии с изобретением в электромеханическом примере выполнения,
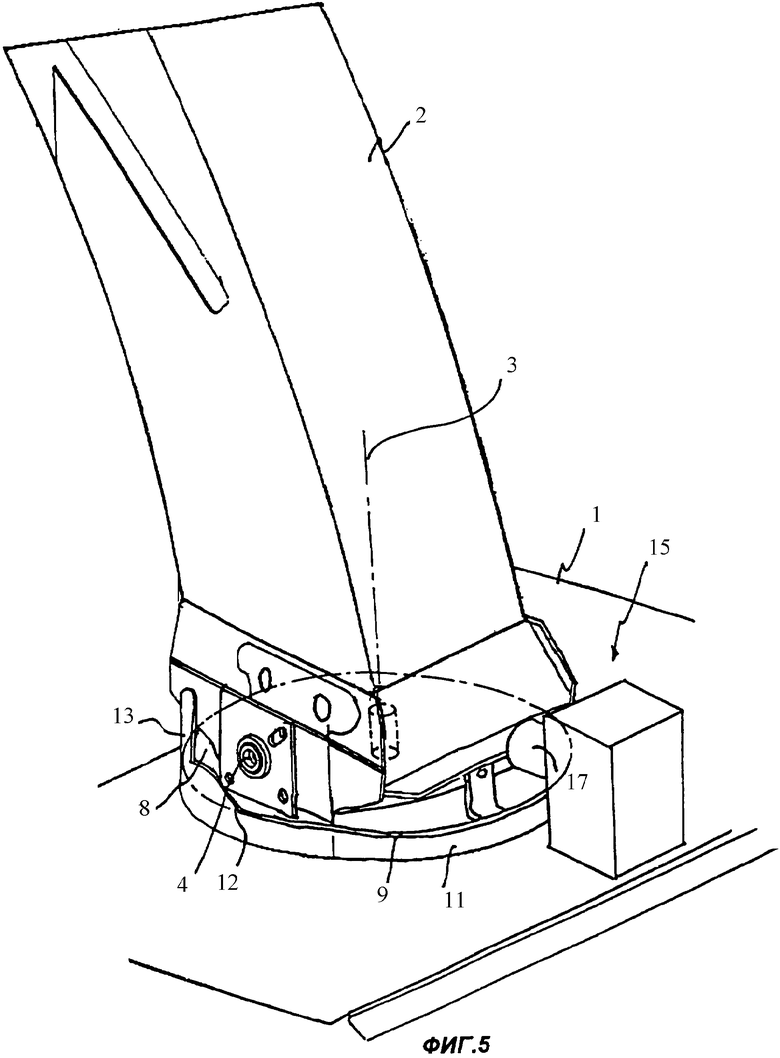
фиг.5 подробно изображает на другом виде в перспективе сзади нижнюю часть разгрузочной трубы по фиг.4.
Осуществление изобретения
В примерах выполнения изобретения, представленных на фиг.1 и 2, уборочная машина представляет собой полевой измельчитель 1, который посредством переднего подборщика 33 производит непрерывный подбор травяного валка 38. Трава измельчается в полевом измельчителе и посредством разгрузочной трубы 2 перегружается в параллельно движущееся транспортное средство 30. В данном случае транспортное средство представляет собой тягач 31, который тянет транспортный прицеп 32 рядом с полевым измельчителем 1. Разгрузочная труба 2 расположена известным образом непосредственно за кабиной 5 водителя полевого измельчителя 1 и установлена с возможностью поворота вокруг вертикальной оси 3 поворота и для целей изменения высотного положения с возможностью поворота вокруг горизонтальной оси 4.
На фиг.1 и 2 разгрузочная труба 2 представлена в двух различных положениях I и II. В первом положении I разгрузочная труба 2 занимает более низкое высотное положение, так что разгрузочный конец разгрузочной трубы 2 находится непосредственно над бортом транспортного прицепа 32. В этом положении I разгрузочная труба 2 повернута полностью вперед по отношению к задней стенке 6 кабины 5 водителя. Как показано на фиг.2, дальнейший поворот разгрузочной трубы 2 вперед в этом высотном положении невозможен. В известных полевых измельчителях в области поворотного круга обычно расположены неподвижные механические упоры, которые препятствуют дальнейшему повороту разгрузочной трубы вперед, независимо от ее высотного положения.
На фиг.1 видно, что водитель уборочной машины должен одновременно следить за областью уборки в направлении 37 движения машины и за областью разгрузки в точке 34 падения потока убранной массы в транспортный прицеп 32. Таким образом, водитель должен попеременно смотреть вперед в направлении движения и оглядываться косо назад на место перегрузки, что является для него дополнительной нагрузкой. В соответствии с изобретением полевой измельчитель 1 оснащен устройством управления разгрузочной трубой 2, которое работает с не жестко зафиксированными границами области поворота. Вместо этого в данном решении средства ограничения области поворота выполнены таким образом, что максимальная допустимая область поворота определяется в зависимости от высотного положения разгрузочной трубы 2.
Как ясно видно на фиг.2, при криволинейной форме разгрузочной трубы 2 существует возможность при некотором высотном положении разгрузочной трубы 2 повернуть ее вокруг вертикальной оси 3 дальше вперед без ее столкновения с кабиной 5 водителя. Поэтому при данном высотном положении область поворота может быть выбрана большей, так что разгрузочная труба 2 может быть повернута дальше вперед во второе положение II, показанное на фиг.1 и 2. В этом втором положении II точка 34 падения выгружаемого потока убранной массы в транспортный прицеп 32 находится значительно дальше спереди по сравнению с этой точкой при первом положении I разгрузочной трубы 2. При этом область перегрузки находится ближе к постоянно наблюдаемой водителем области уборки. За счет этого водитель получает возможность без больших поворотов головы во время ведения машины наблюдать боковым зрением за областью перегрузки. Соответственно, упрощается постоянный контроль за этой областью перегрузки в процессе движения уборочной машины.
На фиг.3 показан пример электронного выполнения устройства по изобретению, предназначенного для управления разгрузочной трубой 2. Центральная часть устройства образована вычислительным блоком 19, например микроконтроллером, который получает через устройства 21, 20 пользовательского интерфейса (далее - устройства интерфейса) вводимые пользователем управляющие команды АВ, WB, НВ для регулировки высотного положения разгрузочной трубы 2, поворота разгрузочной трубы 2 вокруг вертикальной оси 3 и для регулировки положения разгрузочного дефлектора 7, установленного на выпускном конце разгрузочной трубы 2.
В устройствах 20, 21 интерфейса предусмотрена нажимная клавиша 20 для регулировки высотного положения разгрузочной трубы 2. В зависимости от того, вверх или вниз переводит пользователь эту клавишу 20, на вычислительный блок 19 передается соответствующая управляющая команда НВ. Кроме того, в устройствах 20, 21 интерфейса предусмотрена многопозиционная клавиша 21, которая может наклоняться в 4-х направлениях. Эта многопозиционная клавиша 21 может быть соединена, например, с многофункциональной ручкой (типа джойстика), так что водитель может просто управлять ею с помощью большого пальца руки. При смещении вправо или влево вырабатывается соответствующая управляющая команда WB для поворота разгрузочной трубы 2 вправо или влево вокруг вертикальной оси 3. При смещении многопозиционной клавиши 21 вверх или вниз вырабатывается соответствующая управляющая команда АВ для регулировки разгрузочного дефлектора 7 со смещением вверх или вниз. Расположение направлений на переключающей клавише 20 и многопозиционной клавише 21 выбирают таким образом, что водитель интуитивно смещает ее в нужном направлении.
Выходящие от устройств 20, 21 интерфейса управляющие команды АВ, WB, НВ вначале обрабатываются в вычислительном блоке 19. Затем вычислительный блок 19 выдает соответствующий сигнал AS, WS, HS регулировки на устройство 25 регулировки высотного положения, устройство 24 регулировки угла поворота или устройство 23 регулировки положения разгрузочного дефлектора. В данном случае устройство 25 регулировки высотного положения и устройство 23 регулировки положения разгрузочного дефлектора выполнены в виде гидравлических клапанов, которые управляют гидроцилиндрами 10, 18 поворота разгрузочной трубы 2 вокруг горизонтальной оси 4 и поворота разгрузочного дефлектора 7 относительно разгрузочной трубы 2 соответственно. Эти два гидроцилиндра 10, 18 для регулировки высотного положения разгрузочной трубы 2 и регулировки разгрузочного дефлектора 7 на конце разгрузочной трубы 2 хорошо видны на фиг.2. Что касается устройства 24 регулировки угла поворота для поворота разгрузочной трубы 2 вокруг горизонтальной оси 3, оно как правило представляет собой гидронасос с электрогидравлическим управлением, который передает на гидравлический двигатель определенное количество масла. В свою очередь гидравлический двигатель с помощью червячного колеса зацепляется с турелью или поворотным кругом 8 разгрузочной трубы 2 и таким путем поворачивает разгрузочную трубу 2. При этом направление поворота задается направлением вращения гидромотора. Однако вместо гидромотора может использоваться также шаговый двигатель или подобное устройство, которое управляется непосредственно поступающими электрическими сигналами.
Само собой разумеется, что выходные сигналы AS, WS, HS регулировки от вычислительного блока 19 до поступления их на соответствующие регулировочные устройства 23, 24, 25 должны быть преобразованы, например, из цифровой в аналоговую форму. То же самое относится к поступающим от устройств 20, 21 интерфейса управляющим командам АВ, WB, НВ, которые должны быть преобразованы для вычислительного блока 19 из аналоговой в цифровую форму. Требуемые для этого устройства здесь не представлены для большей ясности. Они могут быть частями в составе вычислительного блока 19 или же частями устройств 20, 21 интерфейса или регулировочных устройств 23, 24, 25. Может идти речь также об отдельных устройствах, включенных в схему между устройствами 20, 21 интерфейса, вычислительным блоком 19 и соответствующими регулировочными устройствами 23, 24,25.
Собственно устройство 26 управления как таковое, которое на основе задаваемых пользователем управляющих команд АВ, WB, HB управляет отдельными регулировочными устройствами 23, 24, 25, может быть выполнено в форме программного обеспечения в вычислительном блоке 19. Поэтому на фиг.3 оно представлено в виде программного модуля 26, показанного штриховыми линиями. На основе предварительно заданных управляющих команд АВ, WB, НВ и/или посредством совместного протоколирования выходных сигналов AS, WS, HS регулировки в устройстве 26 управления в каждый момент времени известно, в каком точно положении находятся разгрузочная труба 2 и разгрузочный дефлектор 7. При этом текущие данные положения получают и временно записывают в память чисто программными средствами. Альтернативно возможно также размещение в соответствующих местах разгрузочной трубы 2 и разгрузочного дефлектора 7 датчиков (не представлены), которые регистрируют текущие положения и связаны с вычислительным блоком 19 для передачи на него соответствующих сигналов положения.
Для управления разгрузочной трубой 2 устройство 26 управления по фиг.3 действует следующим образом.
На основе известного высотного положения разгрузочной трубы 2 вначале устройством управления 26 определяются граничные величины области поворота. Это может осуществляться, например, путем считывания таблицы 28, которая записана в запоминающем устройстве 22, связанном с вычислительным блоком 19. В этой таблице для каждого возможного высотного положения указаны граничные величины области поворота. Таблица может просматриваться устройством 26 управления любым образом. При этом могут быть определены не только граничные величины области поворота для определенного высотного положения, но также может быть установлено, каким должно быть высотное положение для получения определенных граничных величин области поворота.
Когда водитель через многопозиционную клавишу 21 вводит управляющую команду WB для поворота разгрузочной трубы 2 вокруг вертикальной оси 3, на основе этой управляющей команды WB вначале устройством 26 управления устанавливается, лежит ли заданный угол поворота разгрузочной трубы 2 в пределах граничных величин области поворота для данного высотного положения. Если ответ положителен, то на регулировочное устройство 24 регулировки угла поворота выдается сигнал WS регулировки угла поворота. Если же в противоположность этому установлено, что заданный угол поворота находится за пределами граничных величин области поворота для данного высотного положения, имеются две различные возможности.
Одна из них состоит в том, что устройство 26 управления с помощью таблицы 28 может найти наиболее близкое высотное положение, которое имеет достаточно большую область поворота. В этом случае устройство 26 управления выдает соответствующий сигнал WS регулировки на устройство 24 регулировки угла поворота и сигнал HS на устройство 25 регулировки высотного положения, так что будет обеспечен желаемый водителем угол поворота, и при этом одновременно разгрузочная труба будет повернута вверх на требуемое расстояние во избежание столкновения с кабиной 5 водителя. При этом изменение высотного положения может производиться непрерывно или ступенчато. Во втором варианте указанных возможностей эта функция не предусмотрена, и сигнал WS на устройство 24 регулировки угла поворота выдается до тех пор, пока разгрузочная труба 2 не достигнет граничной величины угла поворота, предварительно установленной для данного высотного положения. В этом варианте автоматическая регулировка высотного положения посредством устройства 26 управления не осуществляется.
В предпочтительном исполнении устройство 26 управления можно переводить в различные режимы управления. Так например, при нормальных условиях эксплуатации может производиться автоматическая координация регулировки высотного положения для достижения желаемого угла поворота, но водитель может намеренно отключать этот режим в определенных обстоятельствах. Так, при неблагоприятных ветровых условиях и уборке сухой массы, чтобы избежать потерь, водитель может предпочесть удерживать разгрузочную трубу 2 как можно ближе над кромкой борта транспортного средства 30 за счет отказа от оптимального положения области наблюдения за перегрузкой.
С вычислительным блоком 19 могут быть связаны также другие элементы устройств интерфейса, а также дополнительные вычислительные компоненты, регулировочные устройства, индикаторные и тому подобные средства для управления другими функциями уборочной машины и/или переключения между различными режимами эксплуатации. Эти компоненты из соображений наглядности не представлены на фиг.3.
В примере выполнения по фиг.3 устройство 26 управления оснащено автоматическим устройством 27 управления разгрузочным дефлектором. Это устройство обеспечивает, чтобы при повороте разгрузочной трубы 2 вокруг вертикальной и/или горизонтальной осей 3, 4 оставалось постоянным предварительно отрегулированное расстояние 36 перегрузки между полевым измельчителем 1 и точкой 34 падения потока убранной массы в транспортное средство 30. Указанное устройство 27 управления разгрузочным дефлектором выполнено в данном примере в виде программного модуля 27 в вычислительном блоке 19, например в виде подпрограммы устройства 26 управления. Для пояснения необходимо вернуться к фиг.1, где графически представлены дальность 35 разгрузки и расстояние 36 перегрузки. Дальность 35 разгрузки определена здесь как расстояние от вертикальной оси 3 поворота разгрузочной трубы 2 до точки 34 падения потока убранной массы в пределах площади падения, определяемой высотой кромок бортов транспортного прицепа 32. По сравнению с ним расстояние 36 перегрузки определено здесь как расстояние от точки 34 падения до продольной оси полевого измельчителя 1, проходящей через вертикальную ось 3 поворота разгрузочной трубы 2. Таким образом, расстояние 36 перегрузки представляет расстояние, на котором транспортный прицеп 32 должен следовать параллельно полевому измельчителю 1. Представленная на чертежах точка 34 падения или служащая для определения точки 34 падения плоскость падения на высоте кромок бортов транспортного прицепа 32 выбирается произвольно. Может быть также выбрана точка падения на поле 39 или на любой произвольно выбранной плоскости. Таким же образом расстояние 36 перегрузки может быть определено относительно любой линии или точки на полевом измельчителе 1.
Как видно из фиг.1, при повороте разгрузочной трубы 2 из первого положения I во второе положение II дальность 35 разгрузки должна быть значительно увеличена, чтобы сохранить расстояние 36 перегрузки. Частично это осуществляется за счет принудительного поворота разгрузочной трубы 2 в новое высотное положение. В остальном координация дальности 35 разгрузки должна производиться поворотом разгрузочного дефлектора 7 на выпускном конце разгрузочной трубы 2.
Для выполнения этой координации в запоминающем устройстве 22 заложено поле 29 данных, в котором указаны величины расстояния перегрузки в зависимости от возможных положений дефлектора 7, углов поворота и высотных положений разгрузочной трубы 2. Поскольку в распоряжении устройства 26 управления в каждый момент времени имеются данные текущего положения разгрузочной трубы 2 и дефлектора 7, как это было описано выше, на основе поля 29 данных в любой момент может быть определено расстояние 36 перегрузки. И наоборот, при предварительно заданной величине расстояния 36 перегрузки, а также при известном изменении угла установки и высотного положения разгрузочной трубы 2 с помощью поля 29 данных может быть определено необходимое положение разгрузочного дефлектора 7, чтобы достигнуть предварительно заданной величины расстояния 36 перегрузки. В функции устройства 26 управления может входить выдача соответствующего сигнала AS регулировки положения дефлектора от вычислительного блока 19 на устройство 23 регулировки положения разгрузочного дефлектора.
Предпочтительно эта функция автоматического устройства 27 управления разгрузочным дефлектором также может быть отключена водителем в любой момент, так что он путем подъема разгрузочной трубы может по своему желанию изменять расстояние 36 перегрузки 2 без его автоматической корректировки посредством сопутствующего управления разгрузочным дефлектором 7. Кроме того, в любой момент времени с помощью многопозиционной клавиши 21 может производиться приоритетное ручной управление разгрузочным дефлектором 7, при этом такое ручное изменение положения разгрузочного дефлектора 7 вызывает изменение величины расстояния 36 перегрузки. Новое расстояние 36 перегрузки в этом случае служит основой для последующей автоматической подстройки.
На фиг.4 и 5 показан электромеханический вариант выполненного в соответствии с изобретением автоматического управления регулировкой высотного положения разгрузочной трубы 2 в зависимости от отрегулированного угла поворота вокруг вертикальной оси 3.
Для этого на нижнем конце поворотной вокруг горизонтальной оси 4 разгрузочной трубы 2 расположена кулиса 11, окружающая поворотный круг 8 по дуге, примерно равной 3/4 окружности. Кулиса 11 соединена с нижним концом разгрузочной трубы 2 с помощью соединительной тяги 14 и направляется на поворотном круге 8 таким образом, что при повороте разгрузочной трубы 2 вокруг горизонтальной оси 4 вниз кулиса 11 принудительно смещается параллельно поворотному кругу 8 вверх, а при повороте разгрузочной трубы 2 вокруг вертикальной оси 3 кулиса 11 поворачивается вместе с ней. Кулиса 11 снабжена на своем конце упором 13 и кроме того имеет подъемный скос 12 на некотором расстоянии от упора 13. В области центральной оси полевого измельчителя 1 непосредственно за задней стенкой 6 кабины водителя жестко укреплено щуповое или контактное устройство 15 с контактным роликом 17, который посредством рычага 16 связан с регулировочной осью поворотного потенциометра, расположенного внутри корпуса (на чертеже не показан). При повороте своей регулировочной оси этот поворотный потенциометр выдает сигнал регулировки на гидравлический клапан (также не показан), управляющий гидроцилиндром 10 поворота разгрузочной трубы 2 вокруг горизонтальной оси 4. Рычаг 16 подпружинен и удерживается в показанном на фиг.4 положении покоя.
Устройство по фиг.4 и 5 действует таким образом, что при опускании разгрузочной трубы 2 в нижнее положение кулиса 11 автоматически поднимается настолько, что контактный ролик 17 контактного устройства 15 следует по верхнему краю кулисы 11. Далее, когда разгрузочная труба 2 поворачивается вокруг вертикальной оси 3 с помощью поворотного круга 8, контактный ролик 17 катится по кулисе 11 до того примерного положения, пока разгрузочная труба 2 не достигнет прямого угла установки относительно оси полевого измельчителя 1. В этом положении разгрузочной трубы 2 контактный ролик 17 наезжает на подъемный скос 12 кулисы 1 и поднимается вверх, что вызывает автоматический поворот рычага 16 вверх против усилия пружины и соответствующий поворот регулировочной оси поворотного потенциометра. При этом выдается соответствующий сигнал управления для поворота разгрузочной трубы 2 вверх гидроцилиндром 10 до тех пор, пока контактный ролик 17 следует по подъемному скосу 12. Таким образом, посредством поворота разгрузочной трубы 2 с изменением ее высотного положения может быть значительно расширена область ее поворота до того, как контактный ролик 17 не упрется в упор 13 на кулисе 11. Контактное устройство 15 выполнено таким образом, что при упоре контактного ролика в упор 13 вырабатывается сигнал остановки поворота разгрузочной трубы 2 вокруг вертикальной оси 3. Это означает, что контактное устройство 15 выполняет одновременно функцию концевого выключателя.
Следует еще раз отметить, что показанные на чертежах примеры выполнения изобретения не являются ограничивающими, и специалист в данной области может внести в них различные изменения. Так, например, вместо поворотного потенциометра в контактное устройство 15 может быть непосредственно встроен гидравлический клапан, управляемый рычагом 16. Далее, кулиса может быть жестко укреплена на корпусе уборочной машины, а соответствующее контактное устройство укреплено на подвижной части разгрузочной трубы. Разгрузочная труба может состоять из нескольких соединенных друг с другом секций, которые в данном случае для изменения их высотного положения могут поворачиваться отдельно вокруг горизонтальных осей, которые соединяют их с соседними секциями или с уборочной машиной. При этом исполнении секции могут быть повернуты отдельно для изменения отрегулированного высотного положения с целью расширения области поворота. И наконец, возможны различные модификации в электронном варианте осуществления изобретения. В частности, возможны комбинации элементов и особенностей различных примеров выполнения в электронном и механическом вариантах.
Изобретения относятся к вариантам устройства и способа управления перегрузочным устройством на уборочной машине и к уборочной машине с таким устройством. Устройство для управления перегрузочным устройством на уборочной машине содержит средства ограничения области поворота, ограничивающие максимальную допустимую область поворота перегрузочного устройства вокруг вертикальной оси в направлении элемента корпуса, выполненные и/или расположенные с возможностью определения допустимой области поворота в зависимости от высотного положения перегрузочного устройства. Во втором варианте устройство для управления перегрузочным устройством содержит средства управления, предназначенные для того, чтобы при повороте перегрузочного устройства вокруг вертикальной и/или горизонтальной оси автоматически управлять разгрузочным дефлектором с обеспечением постоянства расстояния перегрузки, отрегулированного перед поворотом. В способе управления перегрузочным устройством на уборочной машине допустимую область поворота перегрузочного устройства вокруг вертикальной оси в направлении элемента корпуса определяют в зависимости от высотного положения перегрузочного устройства. Во втором варианте при повороте перегрузочного устройства вокруг вертикальной и/или горизонтальной оси регулируют положение разгрузочного дефлектора таким образом, что расстояние перегрузки, отрегулированное перед поворотом, остается постоянным. Техническим результатом изобретений является создание устройства и способа управления перегрузочным устройством на уборочной машине указанного типа, которые обеспечивают для водителя комфортные условия управления и наблюдения за перегрузочным устройством, а также уборочной машины с таким устройством, снижение нагрузки водителя при управлении и наблюдении за областью перегрузки, кроме того, более гибкое приспособление перегрузочного устройства к параллельно следующему транспортному средству. 5 н. и 12 з.п. ф-лы, 5 ил.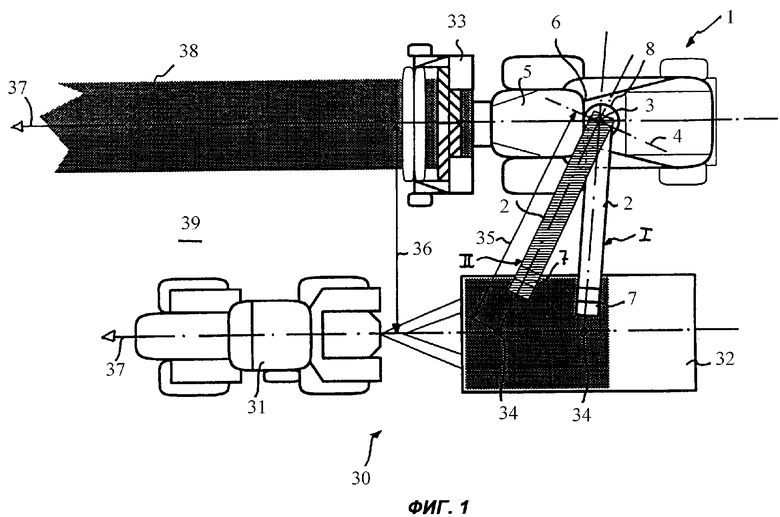
средства для определения величины, которая представляет высотное положение перегрузочного устройства (2),
устройство (21) интерфейса для создания управляющей команды (WB) регулировки угла поворота для поворота разгрузочного устройства (2) вокруг вертикальной оси (3) и
устройство (26) управления, которое на основе указанной величины, представляющей высотное положение, определяет граничные величины соответствующей ей максимальной допустимой области поворота и на основе управляющей команды (WB) регулировки угла поворота и с учетом граничных величин области поворота выдает сигнал (WS) регулировки на устройство (24) регулировки угла поворота для соответствующего поворота перегрузочного устройства (2) вокруг вертикальной оси (3).
| Распылитель жидкости | 1984 |
|
SU1219153A1 |
| US 5749783 А, 12.05.1998 | |||
| Устройство для пайки волной припоя | 1976 |
|
SU666018A1 |
| JP 10000015 A, 06.01.1998 | |||
| Хомут для крепления к уголкам конструкций при навеске монтажных приспособлений | 1983 |
|
SU1151652A1 |

