Данная заявка испрашивает приоритет заявки на патент (Корея) №10-2013-0135659, поданной 8 ноября 2013 года в Корейское Ведомство по Интеллектуальной собственности.
Настоящее изобретение относится к устройству приведения в действие мотора (двигателя) и к машине для стирки белья, включающей в себя его, а более конкретно, к устройству приведения в действие мотора, которое допускает эффективное определение напряжения, приложенного к мотору в бездатчиковой машине для стирки белья, которая не имеет датчика позиции для того, чтобы считывать позицию ротора мотора, и к машине для стирки белья, включающей в себя его.
В общем, машина для стирки белья стирает белье с использованием силы трения между баком для стирки, вращаемым посредством движущей силы мотора, и бельем для стирки в состоянии, в котором белье для стирки содержится в баке для стирки вместе с моющим средством и промывочной водой. Следовательно, можно стирать белье для стирки без порчи белья для стирки и спутывания белья для стирки.
Машина для стирки белья, в общем, включает в себя датчик позиции для того, чтобы считывать позицию ротора мотора.
Тем не менее, разрабатывается машина для стирки белья, которая не использует датчик позиции, с тем чтобы уменьшать затраты на изготовление машины для стирки белья. В этом случае, также изучается способ точной оценки позиции ротора мотора без датчика позиции.
Задача настоящего изобретения заключается в том, чтобы предоставлять устройство приведения в действие мотора, которое допускает эффективное определение напряжения, приложенного к мотору в бездатчиковой машине для стирки белья, и машину для стирки белья, включающую в себя его.
Вышеуказанная задача настоящего изобретения решается посредством признаков, заданных в независимых пунктах формулы изобретения. Дополнительно, предпочтительные признаки изложены в зависимых пунктах формулы изобретения.
В соответствии с аспектом настоящего изобретения, вышеуказанные и другие задачи могут быть решены посредством предоставления машины для стирки белья, включающей в себя бак для стирки, мотор для того, чтобы вращать бак для стирки, и модуль приведения в действие для того, чтобы приводить в действие мотор, при этом модуль приведения в действие включает в себя инвертор для того, чтобы преобразовывать постоянное напряжение в переменное напряжение и выводить переменное напряжение в мотор, модуль определения выходного напряжения для того, чтобы определять выходное напряжение, приложенное к мотору, и контроллер инвертора для того, чтобы управлять инвертором таким образом, чтобы приводить в действие мотор на основе выходного напряжения, при этом модуль определения выходного напряжения включает в себя резистор, электрически подключенный между инвертором и мотором, и компаратор для того, чтобы сравнивать напряжение, определенное посредством резистора, с опорным напряжением и определять выходное напряжение на основе широтно-импульсной модуляции (PWM).
В соответствии с другим аспектом настоящего изобретения, предусмотрено устройство приведения в действие мотора, включающее в себя инвертор для того, чтобы преобразовывать постоянное напряжение в переменное напряжение и выводить переменное напряжение в мотор, модуль определения выходного напряжения для того, чтобы определять выходное напряжение, приложенное к мотору, и контроллер инвертора для того, чтобы управлять инвертором таким образом, чтобы приводить в действие мотор на основе выходного напряжения, при этом модуль определения выходного напряжения включает в себя резистор, электрически подключенный между инвертором и мотором, и компаратор для того, чтобы сравнивать напряжение, определенное посредством резистора, с опорным напряжением и определять выходное напряжение на основе PWM.
Вышеуказанные и другие задачи, признаки и другие преимущества настоящего изобретения должны становиться более понятными из последующего подробного описания, рассматриваемого в связи с прилагаемыми чертежами, на которых:
Фиг. 1 является общим видом, показывающим машину для стирки белья согласно варианту осуществления настоящего изобретения;
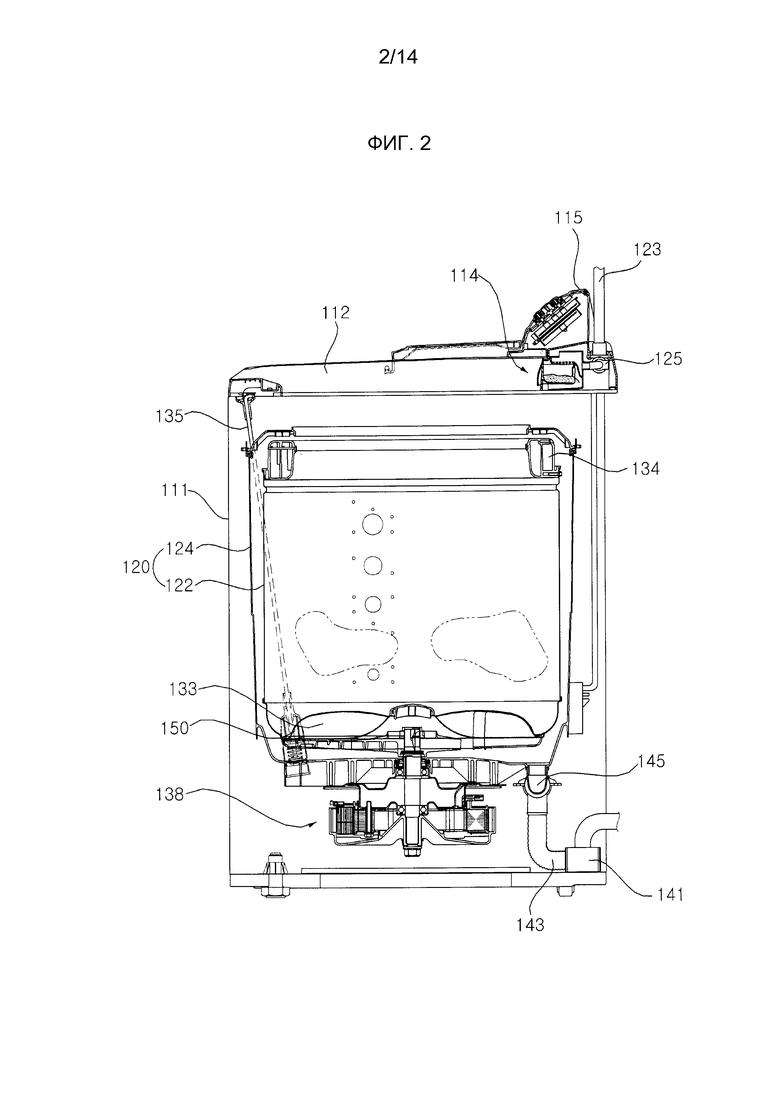
Фиг. 2 является видом сбоку в сечении машины для стирки белья, показанной на Фиг. 1;
Фиг. 3 является внутренней блок-схемой машины для стирки белья, показанной на Фиг. 1;
Фиг. 4 является внутренней принципиальной схемой модуля приведения в действие, показанного на Фиг. 3;
Фиг. 5A является внутренней блок-схемой контроллера инвертора, показанного на Фиг. 4;
Фиг. 5B является внутренней блок-схемой модуля оценки, показанного на Фиг. 5A;
Фиг. 6 является видом, показывающим пример переменного тока, поданного в мотор, показанный на Фиг. 4;
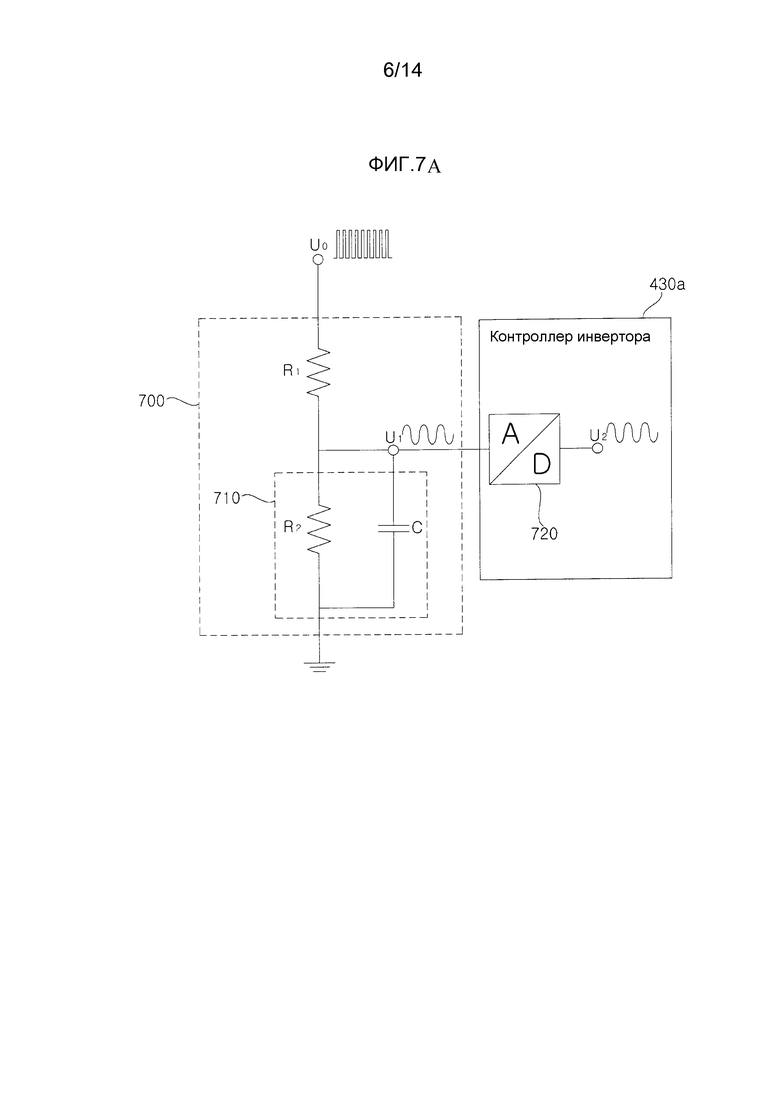
Фиг. 7A является принципиальной схемой, примерно показывающей модуль определения выходного напряжения машины для стирки белья;
Фиг. 7B и 7C являются опорными видами, иллюстрирующими работу модуля определения выходного напряжения, показанного на Фиг. 7A;
Фиг. 8A является принципиальной схемой, примерно показывающей модуль определения выходного напряжения машины для стирки белья согласно варианту осуществления настоящего изобретения;
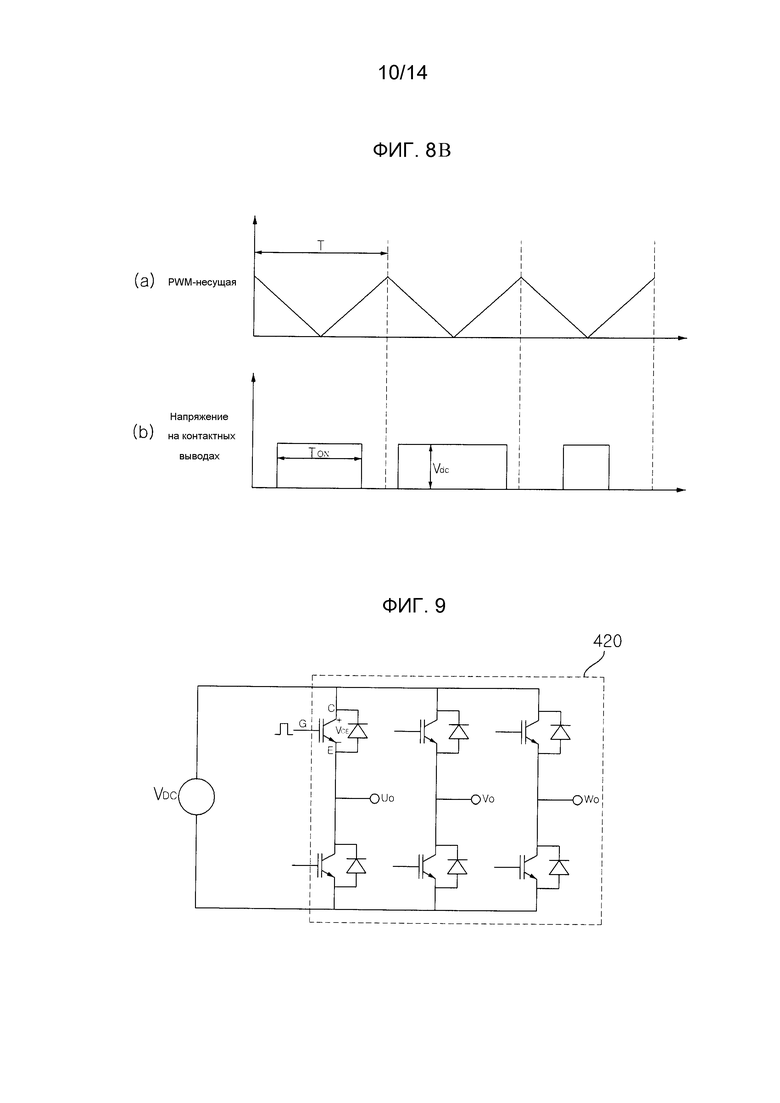
Фиг. 8B является опорным видом, иллюстрирующим работу модуля определения выходного напряжения, показанного на Фиг. 8A;
Фиг. 9 является видом, показывающим инвертор в модуле приведения в действие машины для стирки белья согласно варианту осуществления настоящего изобретения;
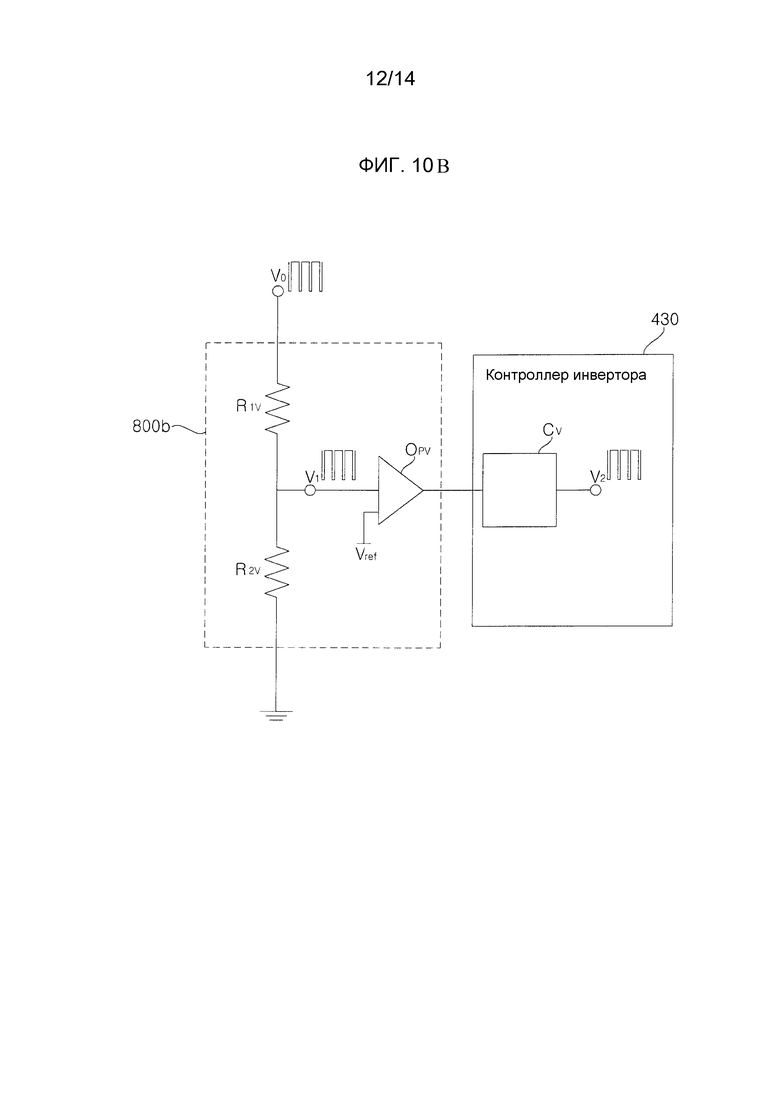
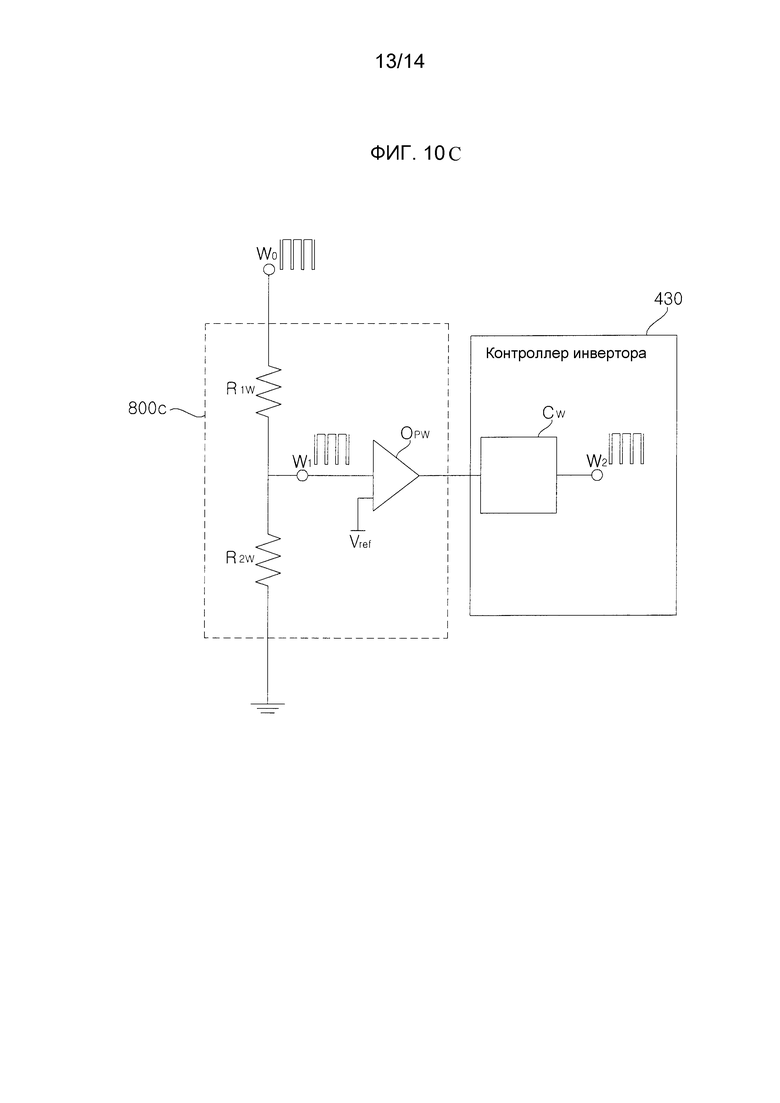
Фиг. 10A-10C являются видами, примерно показывающими модули определения выходного напряжения для соответствующих фаз инвертора, показанного на Фиг. 9; и
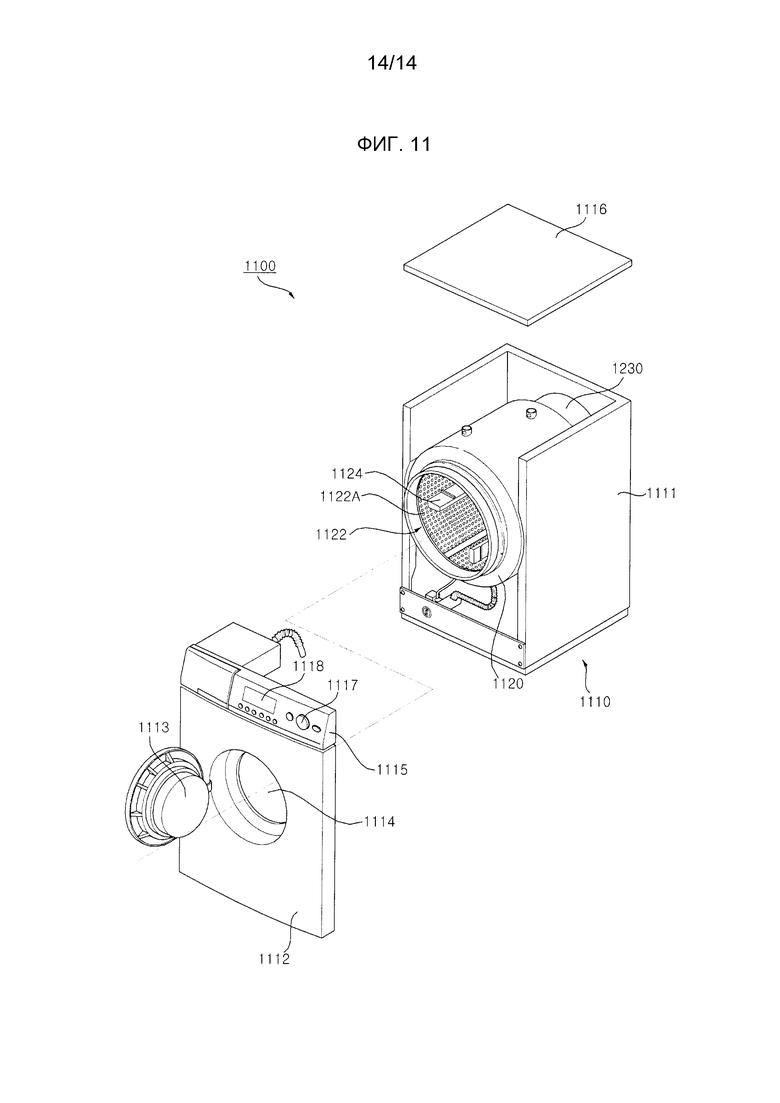
Фиг. 11 является общим видом, показывающим другой пример машины для стирки белья согласно другому варианту осуществления, настоящего изобретения.
Далее приводится подробное описание предпочтительных вариантов осуществления настоящего изобретения, примеры которых проиллюстрированы на прилагаемых чертежах.
Термины "модуль" и "блок" при присоединении к названиям компонентов используются в данном документе для того, чтобы помогать в понимании компонентов, и в силу этого они не должны рассматриваться как имеющие конкретные значения или роли. Соответственно, термины "модуль" и "блок" могут использоваться взаимозаменяемо.
Машина для стирки белья, описанная в этом подробном описании, представляет собой машину для стирки белья, которая допускает оценку позиции ротора мотора, чтобы вращать бак для стирки, без предоставления модуля считывания позиции для считывания позиции ротора мотора, т.е. в бездатчиковом режиме. Далее описывается бездатчиковая машина для стирки белья.
Фиг. 1 является общим видом, показывающим машину для стирки белья согласно варианту осуществления настоящего изобретения, а Фиг. 2 является видом сбоку в сечении машины для стирки белья, показанной на Фиг. 1.
Ссылаясь на Фиг. 1 и 2, машина 100 для стирки белья согласно варианту осуществления настоящего изобретения представляет собой машину для стирки белья с вертикальной загрузкой, выполненную таким образом, что белье для стирки вводится в бак для стирки сверху. Машина для стирки белья с вертикальной загрузкой включает в себя стиральную машину, которая стирает, полощет и сушит с отжимом белье для стирки, введенное в нее, и сушильную машину, которая сушит влажное белье для стирки, введенное в нее. В дальнейшем в этом документе описание приводится на основе стиральной машины.
Стиральная машина 100 включает в себя кожух 110, формирующий внешний вид стиральной машины 100, панель 115 управления, включающую в себя функциональные клавиши для предоставления возможности пользователю вводить различные команды управления, и дисплей для отображения информации, связанной с рабочим режимом стиральной машины 100, для предоставления пользовательского интерфейса, и дверцу 113, шарнирно закрепленную на кожухе 110 для открытия и закрытия отверстия для загрузки, через которое загружается и извлекается белье для стирки.
Кожух 110 может включать в себя основной корпус 111, задающий пространство, в котором принимаются различные компоненты стиральной машины 100, и верхнюю крышку 112, предоставленную на верхней стороне основного корпуса 111, причем верхняя крышка 112 задает отверстие для загрузки белья для стирки, через которое белье для стирки вводится во внутренний бак 122.
Хотя кожух 110 описывается как включающий в себя основной корпус 111 и верхнюю крышку 112, настоящее изобретение не ограничено этим. Например, кожух 110 может просто формировать внешний вид стиральной машины 100.
Между тем, хотя опорный стержень 135 описывается как соединенный с одним из компонентов, составляющих кожух 110, например, с верхней крышкой 112, настоящее изобретение не ограничено этим. Например, опорный стержень 135 может соединяться с любой неподвижной частью кожуха 110.
Панель 115 управления включает в себя функциональные клавиши 117 для предоставления возможности пользователю управлять рабочим режимом стиральной машины 100 и дисплей 118, расположенный на одной стороне функциональных клавиш 117 для отображения рабочего режима стиральной машины 100.
Дверца 113 открывает и закрывает отверстие для загрузки белья для стирки (не указан посредством ссылки с номером), сформированное в верхней крышке 112. Дверца 113 может включать в себя прозрачный элемент, к примеру, закаленное стекло, через которое пользователь может видеть внутреннюю часть основного корпуса 111.
Стиральная машина 100 может включать в себя бак 120 для стирки. Бак 120 для стирки может включать в себя внешний бак 124 для хранения промывочной воды и внутренний бак 122, смонтированный с возможностью вращения во внешнем баке 124 для приема белья для стирки. В верхней части бака 120 для стирки может монтироваться балансир 134 для компенсации эксцентриситета бака 120 для стирки, сформированного в ходе вращения бака 120 для стирки.
Между тем, стиральная машина 100 может включать в себя пульсатор 133, смонтированный с возможностью вращения в нижней части бака 120 для стирки.
Устройство 138 приведения в действие предоставляет движущую силу, необходимую для вращения внутреннего бака 122 и/или пульсатора 133. Стиральная машина 100 может включать в себя муфту (не показана) для избирательной передачи движущей силы устройства 138 приведения в действие на внутренний бак 122 и пульсатор 133, так что вращается только внутренний бак 122, вращается только пульсатор 133, либо вращаются как внутренний бак 122, так и пульсатор 133.
Между тем, устройство 138 приведения в действие работает за счет модуля 220 приведения в действие, т.е. схемы приведения в действие, показанной на Фиг. 3, которая описывается далее со ссылкой на Фиг. 3 и нижеприведенные чертежи.
Между тем, верхняя крышка 112 содержит съемный ящик 114 для моющего средства для приема различных добавок, таких как моющее средство, кондиционер для белья и/или отбеливатель. Промывочная вода, введенная через канал 123 подачи воды, подается во внутренний бак 122 через ящик 114 для моющего средства.
Внутренний бак 122 содержит множество отверстий (не показаны), через которые промывочная вода, поданная во внутренний бак 122, протекает во внешний бак 124. Стиральная машина 100 может включать в себя клапан 125 подачи воды для управления каналом 123 подачи воды.
Промывочная вода может сливаться из внешнего бака 124 через сливной канал 143. Стиральная машина 100 может включать в себя сливной клапан для управления сливным каналом 143 и сливной насос 141 для откачки промывочной воды.
Внешний бак 124 подвешивается в кожухе 110 посредством опорного стержня 135. Один конец опорного стержня 135 соединяется с кожухом 110, а другой конец опорного стержня 135 соединяется с внешним баком 124 через подвеску 150.
Подвеска 150 поглощает вибрацию внешнего бака 124 в ходе работы стиральной машины 100. Например, внешний бак 124 может вибрировать за счет вибрации, формируемой из внутреннего бака 122 в ходе вращения внутреннего бака 122. Подвеска 150 может поглощать вибрацию, формируемую из внешнего бака 124 вследствие различных причин, таких как эксцентриситет белья для стирки, принимаемого во внутреннем баке 122, скорость вращения внутреннего бака 122 или резонансные характеристики внутреннего бака 122, в ходе вращения внутреннего бака 122.
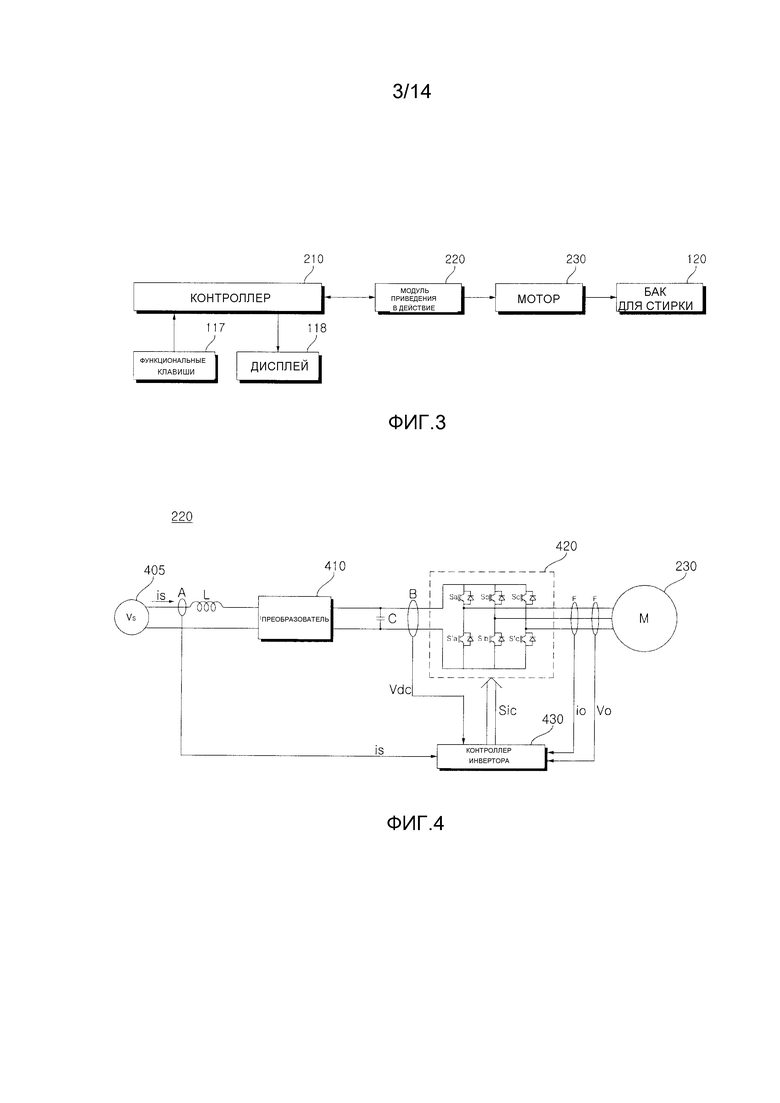
Фиг. 3 является внутренней блок-схемой машины для стирки белья, показанной на Фиг. 1.
Ссылаясь на Фиг. 3, модуль 220 приведения в действие машины 100 для стирки белья управляется посредством контроллера 210. Модуль 220 приведения в действие приводит в действие мотор 230. Как результат, бак 120 для стирки вращается посредством мотора 230.
Контроллер 210 работает согласно управляющему сигналу из функциональных клавиш 117. Как результат, могут выполняться циклы стирки, полоскания и сушки с отжимом машины 100 для стирки белья.
Помимо этого, контроллер 210 может управлять дисплеем 118 таким образом, что он отображает режим стирки, время стирки, время сушки с отжимом, время полоскания или текущий рабочий режим.
Между тем, контроллер 210 может управлять модулем 220 приведения в действие таким образом, чтобы обеспечивать работу мотора 230. Модуль считывания позиции для считывания позиции ротора мотора не предоставляется внутри или за пределами мотора 230. Иными словами, модуль 220 приведения в действие управляет мотором 230 в бездатчиковом режиме.
Модуль 220 приведения в действие приводит в действие мотор 230. Модуль 220 приведения в действие может включать в себя инвертор (не показан), контроллер инвертора (не показан), модуль E определения выходного тока (см. Фиг. 4) для определения выходного тока io, протекающего в моторе 230, и модуль F определения выходного напряжения (см. Фиг. 4) для определения выходного напряжения Vo, приложенного к мотору 230. Помимо этого, модуль 220 приведения в действие дополнительно может включать в себя преобразователь для подачи постоянного напряжения для ввода в инвертор (не показан).
Например, контроллер 430 инвертора (см. Фиг. 4) модуля 220 приведения в действие оценивает позицию ротора мотора 230 на основе выходного тока io и выходного напряжения Vo и управляет мотором 230 таким образом, что он вращается на основе оцененной позиции ротора.
В частности, контроллер 430 инвертора (см. Фиг. 4) формирует сигнал Sic управления коммутацией на основе широтно-импульсной модуляции (PWM) (см. Фиг. 4) на основе выходного тока io и выходного напряжения Vo и выводит сформированный сигнал Sic управления коммутацией в инвертор (не показан). Инвертор (не показан) выполняет операцию высокоскоростной коммутации, чтобы подавать переменное напряжение с предварительно определенной частотой в мотор 230. Мотор 230 вращается посредством переменного напряжения с предварительно определенной частотой.
Далее описывается модуль 220 приведения в действие со ссылкой на Фиг. 4.
Между тем, контроллер 210 может считывать количество белья для стирки на основе выходного тока io, определенного посредством модуля E определения выходного тока. Например, контроллер 210 может считывать количество белья для стирки на основе значения тока io мотора 230 в ходе вращения бака 120 для стирки.
С другой стороны, контроллер 210 может считывать эксцентрическую величину бака 120 для стирки, т.е. разбалансировку (UB) бака 120 для стирки. Эксцентрическая величина бака 120 для стирки может считываться на основе компонента пульсации выходного тока io, определенного посредством модуля E определения выходного тока, либо величины изменения скорости вращения бака 120 для стирки.
Фиг. 4 является внутренней принципиальной схемой модуля приведения в действие, показанного на Фиг. 3.
Ссылаясь на Фиг. 4, модуль 220 приведения в действие согласно варианту осуществления настоящего изобретения приводит в действие бездатчиковый мотор. Модуль 220 приведения в действие может включать в себя преобразователь 410, инвертор 420, контроллер 430 инвертора, модуль B определения напряжения на контактных выводах постоянного тока, сглаживающий конденсатор C, модуль E определения выходного тока и модуль F определения выходного напряжения. Помимо этого, модуль 220 приведения в действие дополнительно может включать в себя модуль A определения входного тока и реактор L.
Реактор L располагается между источником 405 переменного напряжения сети общего пользования (Vs) и преобразователем 410 для выполнения коррекции коэффициента мощности или операции повышения напряжения. Помимо этого, реактор L может функционировать с возможностью ограничивать гармонический ток вследствие высокоскоростной коммутации преобразователя 410.
Модуль A определения входного тока может определять входной ток is, вводимый из источника 405 переменного напряжения сети общего пользования. С этой целью, трансформатор тока (CT) или шунтирующий резистор может использоваться в качестве модуля A определения входного тока. Определенный входной ток is, который представляет собой дискретный импульсный сигнал, может вводиться в контроллер 430 инвертора.
Преобразователь 410 преобразует напряжение, выводимое из источника 405 переменного напряжения сети общего пользования и проходящее через реактор L, в постоянное напряжение и выводит преобразованное постоянное напряжение. Хотя источник 405 переменного напряжения сети общего пользования показан как источник однофазного переменного напряжения на чертеже, источник 405 переменного напряжения сети общего пользования может представлять собой источник трехфазного переменного напряжения. Внутренняя конструкция преобразователя 410 изменяется на основе типа источника 405 переменного напряжения сети общего пользования.
Между тем, преобразователь 410 может включать в себя только диоды без переключающего устройства. В этом случае, преобразователь 410 может выполнять операцию выпрямления без дополнительной операции коммутации.
Например, четыре диода могут размещаться в форме моста для источника однофазного переменного напряжения, и шесть диодов могут размещаться в форме моста для источника трехфазного переменного напряжения.
Например, полумостовой преобразователь, включающий в себя два переключающих устройства и четыре диода, подключенные к переключающим устройствам, может использоваться в качестве преобразователя 410. С другой стороны, шесть переключающих устройств и шесть диодов могут использоваться для источника трехфазного переменного напряжения.
В случае если преобразователь 410 включает в себя переключающее устройство, повышение напряжения, повышение коэффициента мощности и преобразование постоянного напряжения могут выполняться согласно операции коммутации переключающего устройства.
Сглаживающий конденсатор C сглаживает входное напряжение и накапливает сглаженное напряжение. Хотя один сглаживающий конденсатор C показывается на чертеже, может предоставляться множество сглаживающих конденсаторов C, чтобы обеспечивать стабильность устройства.
Между тем, хотя сглаживающий конденсатор C показан как подключенный к выходному контактному выводу преобразователя 410 на чертеже, постоянное напряжение может непосредственно вводиться в сглаживающий конденсатор C. Например, постоянное напряжение из солнечного элемента может непосредственно вводиться в сглаживающий конденсатор C или может подвергаться преобразованию постоянного тока в постоянный ток и затем вводиться в сглаживающий конденсатор C. В дальнейшем в этом документе описание приводится на основе частей, показанных на чертеже.
Между тем, оба контактных вывода сглаживающего конденсатора C могут упоминаться в качестве контактных выводов постоянного тока или контактных выводов звена постоянного тока, поскольку постоянное напряжение накапливается в сглаживающем конденсаторе C.
Модуль B определения напряжения на контактных выводах постоянного тока может определять напряжение Vdc на контактных выводах постоянного тока, приложенное между обоими контактными выводами сглаживающего конденсатора C. С этой целью, модуль B определения напряжения на контактных выводах постоянного тока может включать в себя резистор и усилитель. Определенное напряжение Vdc на контактных выводах постоянного тока, которое представляет собой дискретный импульсный сигнал, может вводиться в контроллер 430 инвертора.
Инвертор 420 может включать в себя множество переключающих устройств инвертора. Инвертор 420 может преобразовывать сглаженное напряжение Vdc на контактных выводах постоянного тока в трехфазные переменные напряжения Va, Vb и Vc с предварительно определенными частотами согласно операциям включения/выключения переключающих устройств и выводить преобразованные трехфазные переменные напряжения Va, Vb и Vc в мотор 230 в качестве трехфазного синхронного мотора.
В инверторе 420 переключающие устройства Sa, Sb и Sc верхнего плеча и переключающие устройства S′a, S′b и S′c нижнего плеча последовательно подключены друг к другу в парах. Как результат, три пары переключающих устройств Sa и S′a, Sb и S′b и Sc и S′c верхнего и нижнего плеча параллельно подключаются друг к другу. Диод встречно-параллельно подключается к каждому из переключающих устройств Sa, S′a, Sb, S′b, Sc и S′c.
Переключающие устройства инвертора 420 включаются/отключаются на основе сигнала Sic управления коммутацией инвертора из контроллера 430 инвертора. С этой целью, трехфазные переменные напряжения с предварительно определенными частотами выводятся в трехфазный синхронный мотор 230.
Контроллер 430 инвертора может управлять операцией коммутации инвертора 420 в бездатчиковом режиме. С этой целью, контроллер 430 инвертора может принимать выходной ток io, определенный посредством модуля E определения выходного тока, и выходное напряжение Vo, определенное посредством модуля F определения выходного напряжения.
Контроллер 430 инвертора выводит сигнал Sic управления коммутацией инвертора в инвертор 420, с тем чтобы управлять операцией коммутации инвертора 420. Сигнал Sic управления коммутацией инвертора, который представляет собой сигнал управления коммутацией на основе PWM, формируется и выводится на основе выходного тока io, определенного посредством модуля E определения выходного тока, и выходного напряжения Vo, определенного посредством модуля F определения выходного напряжения. Далее подробно описывается вывод сигнала Sic управления коммутацией инвертора из контроллера 430 инвертора со ссылкой на Фиг. 5A и 5B.
Модуль E определения выходного тока определяет выходной ток io, протекающий между инвертором 420 и трехфазным синхронным мотором 230. Иными словами, модуль E определения выходного тока определяет ток, протекающий в моторе 230. Модуль E определения выходного тока может определять все трехфазные выходные токи ia, ib и ic. Альтернативно, модуль E определения выходного тока может определять двухфазные выходные токи с использованием трехфазного равновесия.
Модуль E определения выходного тока может быть расположен между инвертором 420 и мотором 230. Для того, чтобы определять ток, трансформатор тока (CT) или шунтирующий резистор может использоваться в качестве модуля E определения выходного тока.
В случае если используется множество шунтирующих резисторов, три шунтирующих резистора могут быть расположены между инвертором 420 и синхронным мотором 230, или один конец каждого из трех шунтирующих резисторов может подключаться к соответствующему одному из трех переключающих устройств S′a, S′b и S′c нижнего плеча инвертора 420. Альтернативно, могут использоваться два шунтирующих резистора на основе трехфазного равновесия. В случае если используется один шунтирующий резистор, с другой стороны, шунтирующий резистор может быть расположен между конденсатором C и инвертором 420.
Определенный выходной ток io, который представляет собой дискретный импульсный сигнал, может вводиться в контроллер 430 инвертора. Сигнал Sic управления коммутацией инвертора формируется на основе определенного выходного тока io. В нижеприведенном описании, определенный выходной ток io может соответствовать трехфазным выходным токам ia, ib и ic.
Модуль F определения выходного напряжения расположен между инвертором 420 и мотором 230 для определения выходного напряжения, приложенного из инвертора 420 к мотору 230. В случае если инвертор 420 работает согласно сигналу управления коммутацией на основе PWM, выходное напряжение может представлять собой импульсное напряжение на основе PWM.
Чтобы определять импульсное напряжение на основе PWM, модуль F определения выходного напряжения может включать в себя резистор, электрически подключенный между инвертором 420 и мотором 230, и компаратор, подключенный к одному концу резистора. Далее подробно описывается модуль F определения выходного напряжения со ссылкой на Фиг. 8A.
Между тем, определенное выходное напряжение Vo на основе PWM, которое представляет собой дискретный импульсный сигнал, может прикладываться к контроллеру 430 инвертора. Сигнал Sic управления коммутацией инвертора формируется на основе определенного выходного напряжения Vo. В нижеприведенном описании, определенное выходное напряжение Vo может соответствовать трехфазным переменным напряжениям Va, Vb и Vc.
Между тем, трехфазный синхронный мотор 230 может включать в себя статоры и ротор. Все трехфазные переменные напряжения с предварительно определенными частотами прикладываются к катушкам всех трехфазных (A-фаза, B-фаза и C-фаза) статоров для того, чтобы вращать ротор.
Например, мотор 230 может включать в себя смонтированный на поверхности синхронный мотор с постоянными магнитами (SMPMSM) и внутренний синхронный мотор с постоянными магнитами (IPMSM), и реактивный синхронный мотор (SynRM). SMPMSM и IPMSM представляют собой синхронные моторы с постоянными магнитами (PMSM), имеющие постоянный магнит, тогда как SynRM представляет собой мотор, не имеющий постоянный магнит.
Между тем, в случае если преобразователь 410 включает в себя переключающее устройство, контроллер 430 инвертора может управлять операцией коммутации переключающего устройства преобразователя 410. С этой целью, контроллер 430 инвертора может принимать входной ток is, определенный посредством модуля A определения входного тока. Помимо этого, контроллер 430 инвертора может выводить сигнал Scc управления коммутацией преобразователя в преобразователь 410, с тем чтобы управлять операцией коммутации преобразователя 410. Сигнал Scc управления коммутацией преобразователя, который представляет собой сигнал управления коммутацией на основе PWM, формируется и выводится на основе входного тока is, определенного посредством модуля A определения входного тока.
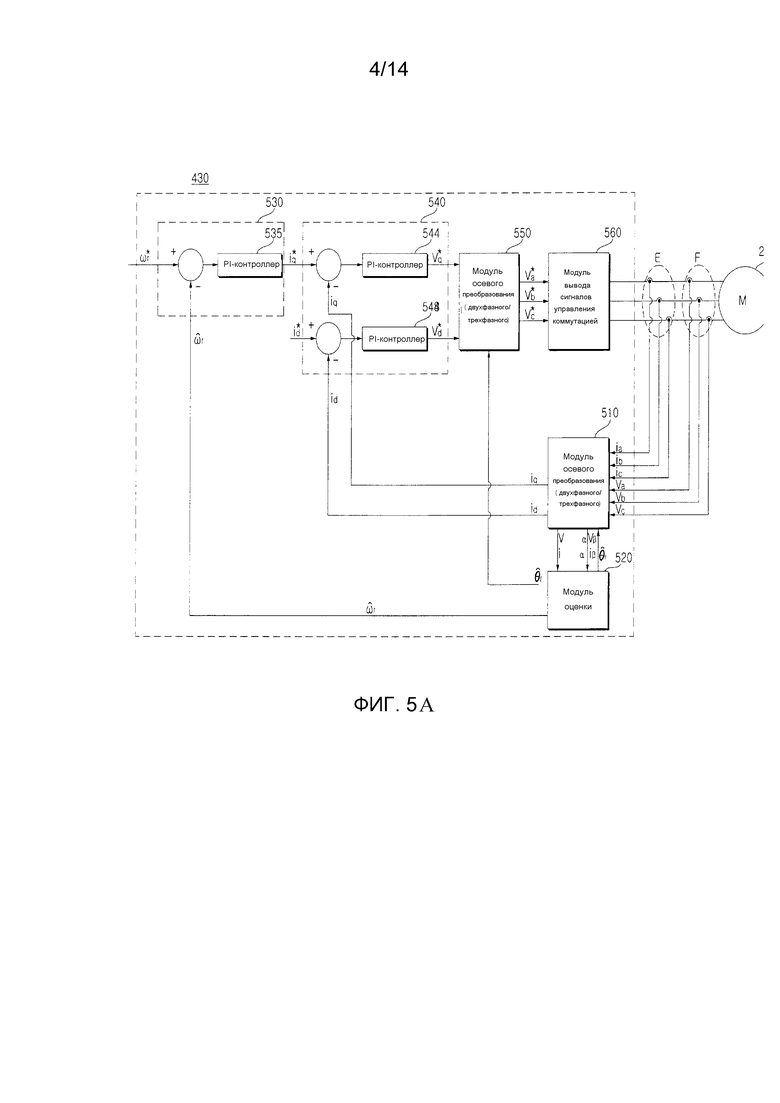
Фиг. 5A является внутренней блок-схемой контроллера инвертора, показанного на Фиг. 4, а Фиг. 5B является внутренней блок-схемой модуля оценки, показанного на Фиг. 5A.
Ссылаясь на Фиг. 5A, контроллер 430 инвертора может включать в себя модуль 510 осевого преобразования, модуль 520 оценки, модуль 530 формирования команд управления током, модуль 540 формирования команд управления напряжением, модуль 550 осевого преобразования и модуль 560 вывода сигналов управления коммутацией.
Модуль 510 осевого преобразования может принимать выходные токи ia, ib и ic, определенные посредством модуля E определения выходного тока, и преобразовывать принимаемые выходные токи ia, ib и ic в двухфазные токи iα и iβ неподвижной системы координат и двухфазные токи id и iq вращающейся системы координат.
Между тем, модуль 510 осевого преобразования принимает выходные напряжения Va, Vb и Vc на основе PWM, определенные посредством модуля F определения выходного напряжения для того, чтобы вычислять скважность, и вычисляет полюсное напряжение Vpn на основе вычисленной скважности. Нижеприведенное уравнение 1 показывает способ вычисления полюсного напряжения.
Уравнение 1
 ,
,
где Vdc указывает напряжение на контактных выводах постоянного тока, определенное посредством модуля B определения напряжения на контактных выводах постоянного тока, T указывает период времени управления, т.е. единичный период времени несущего сигнала для формирования PWM-сигнала управления коммутацией, и Ton указывает время включения, т.е. скважность, в пределах единичного периода T времени.
Между тем, модуль 510 осевого преобразования вычисляет трехфазные полюсные напряжения Vun, Vvn и Vwn в ответ на трехфазные выходные напряжения Va, Vb и Vc на основе PWM.
Помимо этого, модуль 510 осевого преобразования может вычислять напряжение Voffset смещения с использованием трехфазных полюсных напряжений Vun, Vvn и Vwn, как представлено посредством уравнения 2.
Уравнение 2

Помимо этого, модуль 510 осевого преобразования может вычислять трехфазные напряжения Vas, Vbs и Vcs, приложенные к соответствующим фазам мотора 230, с использованием трехфазных полюсных напряжений Vun, Vvn и Vwn и напряжения Voffset смещения, как представлено посредством уравнения 3.
Уравнение 3
Помимо этого, модуль 510 осевого преобразования может вычислять двухфазные напряжения Vα и Vβ неподвижной системы координат с использованием трехфазных напряжений Vas, Vbs и Vcs, как представлено посредством уравнения 4. С другой стороны, модуль 510 осевого преобразования может преобразовывать двухфазные напряжения Vα и Vβ неподвижной системы координат в двухфазные напряжения Vd и Vq вращающейся системы координат.
Уравнение 4
Между тем, модуль 510 осевого преобразования может выводить преобразованные двухфазные токи iα и iβ неподвижной системы координат, преобразованные двухфазные напряжения Vα и Vβ неподвижной системы координат, преобразованные двухфазные токи id и iq вращающейся системы координат и преобразованные двухфазные напряжения Vd и Vq вращающейся системы координат наружу.
Модуль 520 оценки может принимать двухфазные токи iα и iβ после осевого преобразования неподвижной системы координат и двухфазные напряжения Vα и Vβ после осевого преобразования неподвижной системы координат из модуля 510 осевого преобразования для того, чтобы оценивать позицию θ ротора и частоту ω вращения мотора 230.
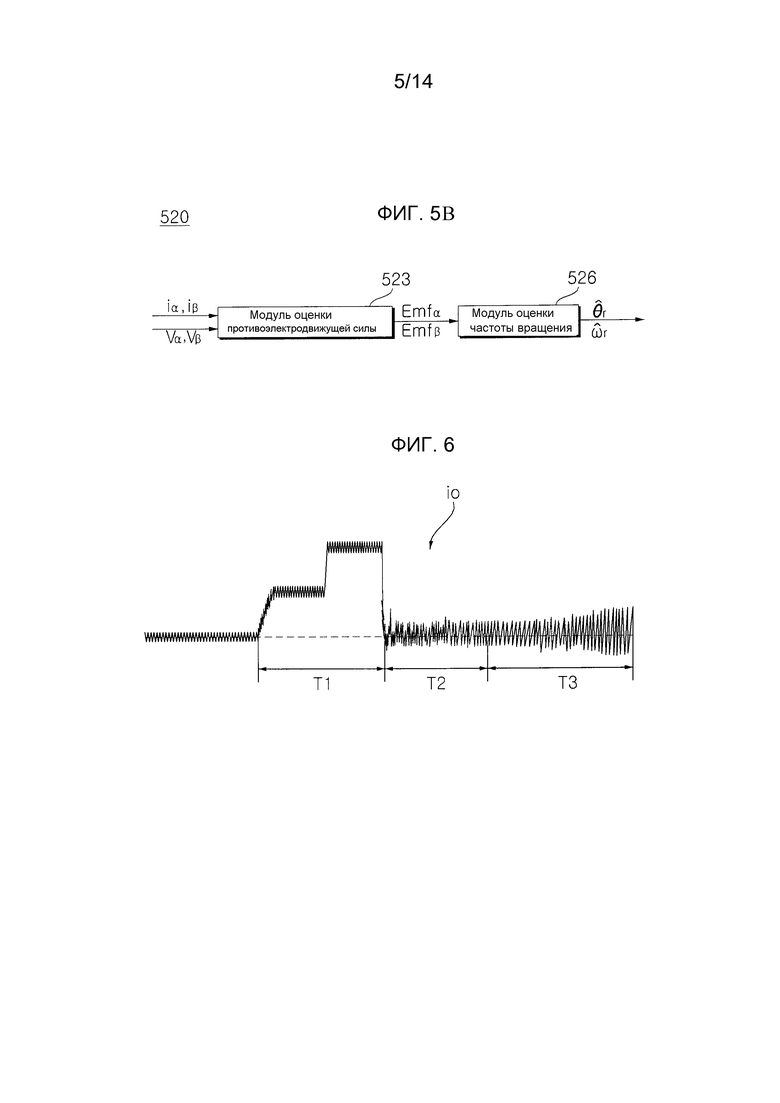
В частности, ссылаясь на Фиг. 5B, модуль 520 оценки может включать в себя модуль 523 оценки противоэлектродвижущей силы для оценки противоэлектродвижущей силы, вызываемой в моторе 230, и модуль 526 оценки частоты вращения для оценки позиции  ротора и частоты
ротора и частоты  вращения мотора 230.
вращения мотора 230.
Модуль 523 оценки противоэлектродвижущей силы может принимать двухфазные токи iα и iβ неподвижной системы координат и двухфазные напряжения Vα и Vβ неподвижной системы координат из модуля 510 осевого преобразования для того, чтобы оценивать двухфазные противоэлектродвижущие силы Emfα и Emfβ неподвижной системы координат с использованием модуля наблюдения противоэлектродвижущей силы, на основе неподвижной системы координат.
Между тем, двухфазные противоэлектродвижущие силы Emfα и Emfβ неподвижной системы координат могут выражаться как функция для частоты вращения и позиции ротора мотора, как представлено посредством уравнения 5.
Уравнение 5
 ,
,
где ωr указывает частоту вращения мотора, θr указывает позицию ротора мотора, а λ указывает наблюдаемый магнитный поток.
Между тем, модуль 526 оценки частоты вращения может оценивать позицию ротора мотора 230 через арктангенциальное вычисление с использованием оцененных противоэлектродвижущих сил Emfα и Emfβ, как представлено посредством уравнения 6.
Уравнение 6
Между тем, модуль 526 оценки частоты вращения может оценивать позицию ротора и частоту вращения мотора 230 с использованием модуля наблюдения частоты вращения во всех измерениях после арктангенциального вычисления.
Как результат, модуль 520 оценки может выводить оцененную позицию и оцененную частоту вращения на основе входных двухфазных токов iα и iβ неподвижной системы координат и входных двухфазных напряжений Vα и Vβ неподвижной системы координат.
Между тем, модуль 530 формирования команд управления током формирует значение i*q команды управления током на основе оцененной частоты вращения и значения ω*r команды управления частотой вращения. Например, PI-контроллер 535 модуля 530 формирования команд управления током может выполнять PI-управление на основе разности между оцененной частотой вращения и значением ω*r команды управления частотой вращения таким образом, чтобы формировать значение i*q команды управления током. Хотя значение i*q команды управления током q-оси показано как значение команды управления током на чертеже, можно формировать значение i*d команды управления током d-оси вместе со значением i*q команды управления током q-оси. Значение i*d команды управления током d-оси может задаваться равным 0.
Между тем, модуль 530 формирования команд управления током дополнительно может включать в себя модуль ограничения (не показан) для ограничения уровня значения i*q команды управления током таким образом, что значение i*q команды управления током не превышает допустимый диапазон.
Модуль 540 формирования команд управления напряжением может формировать значения V*d и V*q команды управления напряжением d-оси и q-оси на основе токов id и iq d-оси и q-оси после осевого преобразования в двухфазную вращающуюся систему координат посредством модуля осевого преобразования и значения i*d и i*q команды управления током, сформированного посредством модуля 530 формирования команд управления током. Например, PI-контроллер 544 модуля 540 формирования команд управления напряжением может выполнять PI-управление на основе разности между током iq q-оси и значением i*q команды управления током q-оси таким образом, чтобы формировать значение V*q команды управления напряжением q-оси. Помимо этого, PI-контроллер 548 модуля 540 формирования команд управления напряжением может выполнять PI-управление на основе разности между током id d-оси и значением i*d команды управления током d-оси таким образом, чтобы формировать значение V*d команды управления напряжением d-оси. Значение V*d команды управления напряжением d-оси может задаваться равным 0 в ответ на случай, в котором значение i*d команды управления током d-оси задается равным 0.
Между тем, модуль 540 формирования команд управления напряжением дополнительно может включать в себя модуль ограничения (не показан) для ограничения уровней значений V*d и V*q команды управления напряжением d-оси и q-оси таким образом, что значения V*d и V*q команды управления напряжением d-оси и q-оси не превышают допустимые диапазоны.
Между тем, сформированные значения V*d и V*q команды управления напряжением d-оси и q-оси вводятся в модуль 550 осевого преобразования.
Модуль 550 осевого преобразования принимает оцененную позицию и значения V*d и V*q команды управления напряжением d-оси и q-оси из модуля 520 оценки для того, чтобы выполнять осевое преобразование.
Во-первых, модуль 550 осевого преобразования выполняет преобразование из двухфазной вращающейся системы координат в двухфазную неподвижную систему координат. В это время, может использоваться позиция , оцененная посредством модуля 520 оценки.
Затем, модуль 550 осевого преобразования выполняет преобразование из двухфазной неподвижной системы координат в трехфазную неподвижную систему координат. Как результат, модуль 550 осевого преобразования выводит значения V*a, V*b и V*c команды управления трехфазным выходным напряжением.
Модуль 560 вывода сигналов управления коммутацией формирует и выводит сигнал Sic управления коммутацией инвертора на основе PWM на основе значений V*a, V*b и V*c команды управления трехфазным выходным напряжением.
Выходной сигнал Sic управления коммутацией инвертора может преобразовываться в сигнал возбуждения затвора посредством модуля возбуждения затвора (не показан) и затем вводиться в затвор каждого переключающего устройства инвертора 420. Как результат, соответствующие переключающие устройства Sa, S′a, Sb, S′b, Sc и S′c инвертора 420 могут выполнять операции коммутации.
Фиг. 6 является видом, показывающим пример переменного тока, поданного в мотор, показанный на Фиг. 4.
Согласно операции коммутации инвертора 420, ток протекает в моторе 230, как показано на Фиг. 6.
В частности, период времени работы мотора 230 может разделяться на начальный период T1 времени работы, который представляет собой первоначальный период времени работы, и нормальные периоды T2 и T3 времени работы.
Начальный период T1 времени работы может упоминаться в качестве периода времени совмещения мотора, в течение которого неизменяющийся ток подается в мотор 230. Иными словами, для того чтобы совмещать ротор мотора 230 в стационарном состоянии в предварительно определенной позиции, одно из трех переключающих устройств верхнего плеча инвертора 420 включается, и другие два переключающих устройства нижнего плеча, которые не составляют пары с включенным переключающим устройством верхнего плеча, включаются.
В течение начального периода T1 времени работы ротор мотора 230 остается стационарным в предварительно определенной позиции. Следовательно, можно определять значение Rs сопротивления статора мотора 230 с использованием информации, связанной с выходным напряжением и выходным током в это время.
Тем не менее, в случае если присутствует ошибка ΔV напряжения, упомянутое определенное значение сопротивления может иметь ошибку ΔR сопротивления.
Чтобы разрешать эту проблему, контроллер 430 инвертора может управлять неизменяющимся током первого уровня и неизменяющимся током второго уровня таким образом, что они последовательно подаются в мотор в течение начального периода T1 времени работы.
Иными словами, можно исключать ошибку ΔR сопротивления посредством последовательной подачи неизменяющегося тока первого уровня и неизменяющегося тока второго уровня в мотор. Следовательно, можно точно определять значение Rs сопротивления статора.
После начального периода T1 времени работы, постепенно увеличивается частота вращения мотора, так что в итоге мотор приводится в действие в нормальном рабочем режиме. Между тем, нормальные периоды T2 и T3 времени работы могут разделяться на период T2 времени работы при низкой частоте вращения и период T3 времени работы при высокой частоте вращения.
Согласно способу бездатчиковой оценки позиции, описанному в этом подробном описании, позиционная ошибка увеличивается в случае, если позиция ротора мотора оценивается на основе только выходного тока, определенного посредством модуля E определения выходного тока без использования модуля F определения выходного напряжения, в течение периода T2 времени работы при низкой частоте вращения, который составляет период времени от 0 до 100 об/мин. С другой стороны, позиционная ошибка не увеличивается в течение периода T3 времени работы при высокой частоте вращения, который составляет период времени для более 100 об/мин.
Следовательно, в настоящем изобретении модуль F определения выходного напряжения используется в дополнение к модулю E определения выходного тока.
Фиг. 7A является принципиальной схемой, примерно показывающей модуль определения выходного напряжения машины для стирки белья, а Фиг. 7B и 7C являются опорными видами, иллюстрирующими работу модуля определения выходного напряжения, показанного на Фиг. 7A.
Ссылаясь на Фиг. 7A, модуль 700 определения выходного напряжения, который представляет собой модуль определения нормального напряжения, включает в себя резисторы R1 и R2 и конденсатор C.
Резисторы R1 и R2 и конденсатор C модуля 700 определения выходного напряжения подключаются к любому из трехфазных контактных выводов Uo, Vo и Wo инвертора 420.
Резистор R2 и конденсатор C модуля 700 определения выходного напряжения формируют RC-фильтр для выполнения фильтрации нижних частот. Как результат, форма импульсного сигнала, определенная из каждого из трехфазных контактных выводов, преобразуется в аналоговый сигнал через фильтрацию нижних частот. Контроллер 430a инвертора принимает фильтрованный по нижним частотам аналоговый сигнал. По этой причине, необходимо, чтобы контроллер 430a инвертора включал в себя аналого-цифровой преобразователь 720 для преобразования аналогового сигнала в дискретный сигнал.
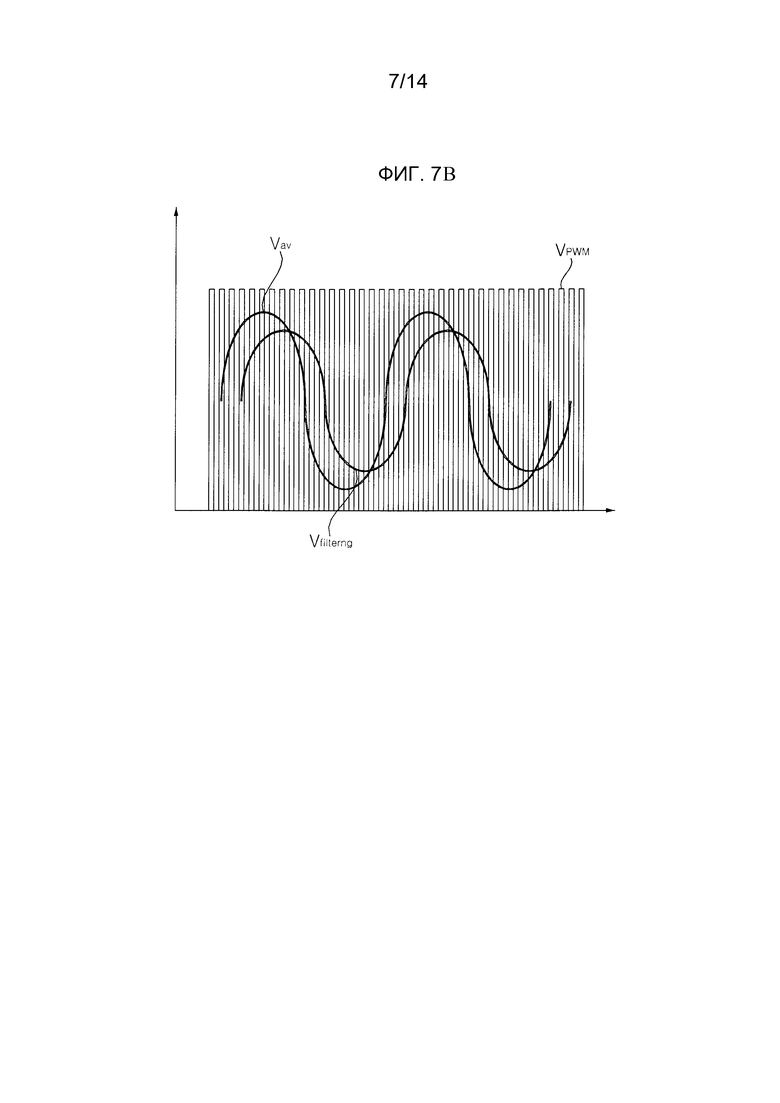
Фиг. 7B показывает сравнение между средним напряжением Vav реальных выходных напряжений, определенных посредством модуля 700 определения выходного напряжения по Фиг. 7A, и фильтрованным по нижним частотам напряжением Vfiltering в качестве напряжения контактного вывода U1 по Фиг. 7A.
Амплитуда и фаза упомянутого определенного среднего PWM-напряжения имеют ошибку вследствие фильтра нижних частот по Фиг. 7A. Кроме того, по мере того, как возрастает рабочая частота, также увеличивается ошибка информации напряжения, так что в итоге может снижаться производительность работы в бездатчиковом режиме.
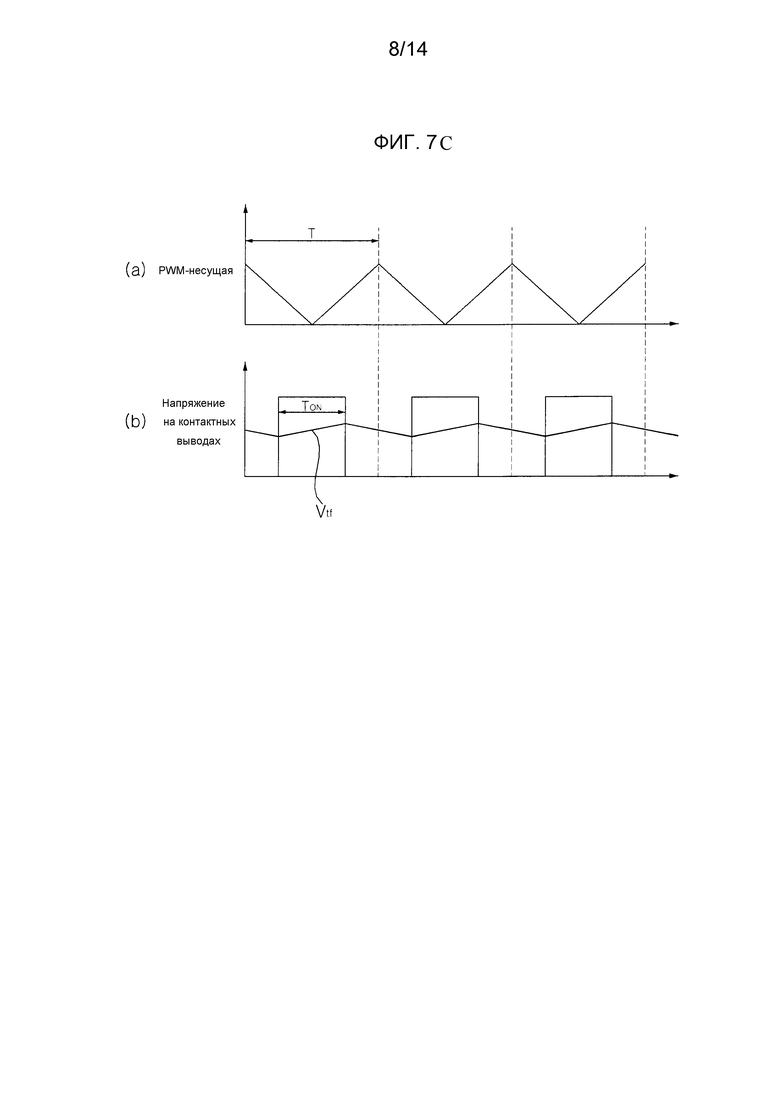
Фиг. 7C является опорным видом, иллюстрирующим получение полюсного напряжения в контроллере 430a инвертора. В случае если используется модуль 700 определения выходного напряжения по Фиг. 7A, необходимо дополнительно предоставлять аналого-цифровой преобразователь 720. По этой причине, абсолютная величина информации упомянутого определенного напряжения может иметь ошибку согласно времени инициирования ADC.
Чтобы разрешать вышеуказанную проблему, настоящее изобретение предлагает модуль определения выходного напряжения, который допускает непосредственное определение выходного импульсного напряжения на основе PWM без дополнительного преобразования в аналоговый сигнал с использованием резисторов и компаратора.
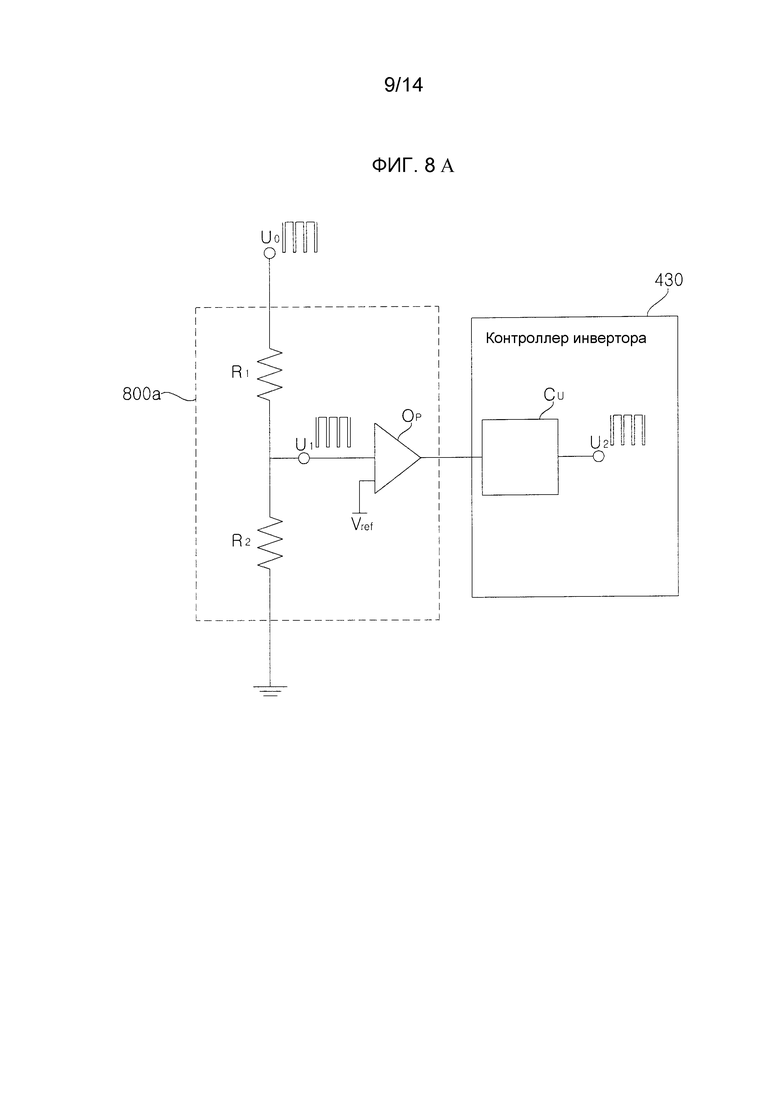
Фиг. 8A является принципиальной схемой, примерно показывающей модуль определения выходного напряжения машины для стирки белья согласно варианту осуществления настоящего изобретения, а Фиг. 8B является опорным видом, иллюстрирующим работу модуля определения выходного напряжения, показанного на Фиг. 8A.
Со ссылкой на чертежи, модуль 800a определения выходного напряжения включает в себя резисторы R1 и R2 и компаратор Op.
Первый резистор R1 электрически подключен между инвертором 420 и мотором 230. В частности, первый резистор R1 электрически подключен к любому Uo из выходных контактных выводов Uo, Vo и Wo инвертора 420.
Второй резистор R2 подключается между первым резистором R1 и землей. Иными словами, первый резистор R1 и второй резистор R2 последовательно подключены друг к другу. Как результат, выходное напряжение, выводимое из выходного контактного вывода Uo инвертора 420, делится посредством первого резистора R1 и второго резистора R2.
Между тем, компаратор Op подключается между узлом U1, расположенным между первым резистором R1 и вторым резистором R2, и контроллером 430 инвертора.
Выходное напряжение, деленное посредством второго резистора R2, вводится в компаратор Op. Компаратор Op сравнивает деленное выходное напряжение с опорным напряжением Vref и выводит результирующее значение.
В случае если выходное импульсное напряжение на основе PWM выводится из выходного контактного вывода Uo инвертора 420, выходное напряжение делится посредством резисторов R1 и R2 модуля 800a определения выходного напряжения по Фиг. 8A, и деленное импульсное напряжение непосредственно вводится в компаратор Op. Импульсное напряжение выводится только в случае, если импульсное напряжение равно или превышает опорное напряжение Vref.
Следовательно, контроллер 430 инвертора может принимать упомянутое определенное выходное импульсное напряжение без дополнительного аналого-цифрового преобразователя. Между тем, контроллер 430 инвертора может непосредственно захватывать упомянутое определенное выходное импульсное напряжение с использованием модуля Cu захвата и затем сразу выполнять вычисление скважности.
Фиг. 8B (a) примерно показывает единичный период T времени несущего сигнала для формирования PWM-сигнала управления коммутацией, а Фиг. 8B (b) примерно показывает скважность на основе упомянутого определенного выходного импульсного напряжения.
Иными словами, как показано на Фиг. 8B, время включения, т.е. скважность, может вычисляться в пределах единичного периода T времени несущего сигнала на основе упомянутого определенного выходного импульсного напряжения. Помимо этого, среднее полюсное напряжение Vpn может вычисляться с использованием скважности Ton, напряжения Vdc на контактных выводах постоянного тока и единичного периода T времени несущего сигнала, как указано в уравнении 1, описанном выше.
Как результат, модуль 800a определения выходного напряжения по Фиг. 8A может быстро определять выходное импульсное напряжение через регулировку уровня на основе деления напряжения без дополнительного преобразования, к примеру, фильтрации нижних частот. Помимо этого, контроллеру 430 инвертора не требуется дополнительный аналого-цифровой преобразователь, так что в итоге может точно вычисляться время включения, т.е. скважность. Между тем, сравнение между выходным напряжением и опорным напряжением выполняется посредством компаратора Op, так что в итоге можно удалять компонент шума.
После вычисления среднего полюсного напряжения Vpn контроллер 430 инвертора может вычислять напряжение Voffset смещения, трехфазные напряжения Vas, Vbs и Vcs, двухфазные напряжения Vα и Vβ неподвижной системы координат, оцененные противоэлектродвижущие силы Emfα и Emfβ, оцененную позицию и оцененную частоту вращения с использованием уравнений 2-6, как описано выше.
На основе вышеприведенного вычисления, контроллер 430 инвертора может выводить сигнал управления коммутацией для управления таким образом, чтобы точно управлять мотором в бездатчиковом режиме.
Между тем, модуль 800a определения выходного напряжения по Фиг. 8A может применяться для определения выходного напряжения из соответствующих выходных контактных выводов Uo, Vo и Wo инвертора 420.
Фиг. 9 является видом, показывающим инвертор в модуле приведения в действие машины для стирки белья согласно варианту осуществления настоящего изобретения, а Фиг. 10A-10C являются видами, примерно показывающими модули определения выходного напряжения для соответствующих фаз инвертора, показанного на Фиг. 9.
Фиг. 9 примерно показывает то, что инвертор 420 включает в себя множество трехфазных переключающих устройств. Помимо этого, соответствующие выходные контактные выводы Uo, Vo и Wo инвертора 420 примерно показаны на Фиг. 9.
Фиг. 10A примерно показывает первый модуль 800a определения выходного напряжения, электрически подключенный к первому выходному контактному выводу Uo из соответствующих выходных контактных выводов Uo, Vo и Wo инвертора 420, как показано на Фиг. 8A, Фиг. 10B примерно показывает второй модуль 800b определения выходного напряжения, электрически подключенный ко второму выходному контактному выводу Vo из соответствующих выходных контактных выводов Uo, Vo и Wo инвертора 420, а Фиг. 10C примерно показывает третий модуль 800c определения выходного напряжения, электрически подключенный к третьему выходному контактному выводу Wo из соответствующих выходных контактных выводов Uo, Vo и Wo инвертора 420.
Второй модуль 800b определения выходного напряжения включает в себя резисторы R1v и R2v, электрически подключенные ко второму выходному контактному выводу Vo, и компаратор Opv для сравнения напряжения, определенного посредством резистора R2v, с опорным напряжением Vref, чтобы определять выходное напряжение на основе PWM.
Третий модуль 800c определения выходного напряжения включает в себя резисторы R1w и R2w, электрически подключенные к третьему выходному контактному выводу Wo, и компаратор Opw для сравнения напряжения, определенного посредством резистора R2w, с опорным напряжением Vref, чтобы определять выходное напряжение на основе PWM.
Выходные напряжения на основе PWM, соответствующие надлежащим выходным контактным выводам, определенным посредством первого-третьего модулей 800a, 800b и 800c определения выходного напряжения, вводятся в контроллер 430 инвертора, как показано на чертежах.
Между тем, бездатчиковая машина для стирки белья согласно настоящему изобретению может применяться к машине для стирки белья типа с фронтальной загрузкой, помимо машины для стирки белья с вертикальной загрузкой по Фиг. 1.
Фиг. 11 является общим видом, показывающим другой пример машины для стирки белья согласно другому варианту осуществления, настоящего изобретения.
Ссылаясь на Фиг. 11, машина 1100 для стирки белья согласно другому варианту осуществления настоящего изобретения представляет собой машину для стирки белья типа с фронтальной загрузкой, выполненную таким образом, что белье для стирки вводится в бак для стирки спереди. Машина для стирки белья типа с фронтальной загрузкой может работать в бездатчиковом режиме, как описано выше со ссылкой на Фиг. 1-10. В частности, модуль 800a определения выходного напряжения, как показано на Фиг. 8A, может применяться к машине для стирки белья типа с фронтальной загрузкой по Фиг. 11.
В дальнейшем в этом документе приводится описание машины для стирки белья типа с фронтальной загрузкой по Фиг. 11.
Ссылаясь на Фиг. 11, машина 1100 для стирки белья, которая представляет собой барабанную машину для стирки белья, включает в себя кожух 1110, формирующий внешний вид машины 1100 для стирки белья, бак 1120, расположенный в кожухе 1110 таким образом, что бак 1120 поддерживается посредством кожуха 1110, барабан 1122, расположенный в баке 1120 для стирки белья, мотор 1130 для приведения в действие барабана 1122, устройство подачи промывочной воды (не показано), расположенное за пределами корпуса 1111 кожуха для подачи промывочной воды в кожух 1110, и устройство слива (не показано), расположенное на нижней стороне бака 1120 для слива промывочной воды наружу.
Барабан 1122 может содержать множество сквозных отверстий 1122A, через которые протекает промывочная вода. Помимо этого, барабан 1122 может содержать на внутренней окружности толкатели 1124 для подъема белья для стирки на предварительно определенную высоту, так что белье для стирки опускается вследствие силы тяжести в ходе вращения барабана 1122.
Кожух 1110 включает в себя корпус 1111 кожуха, крышку 1112 кожуха, расположенную впереди корпуса 1111 кожуха в состоянии, в котором крышка 1112 кожуха соединяется с корпусом 1111 кожуха, панель 1115 управления, расположенную на верхней стороне крышки 1112 кожуха в состоянии, в котором панель 1115 управления соединяется с корпусом 1111 кожуха, и верхнюю пластину 1116, расположенную на верхней стороне панели 1115 управления в состоянии, в котором верхняя пластина 1116 соединяется с корпусом 1111 кожуха.
Крышка 1112 кожуха включает в себя отверстие 1114 для загрузки белья для стирки, через который белье для стирки вводится в барабан 1122, и дверцу 1113, горизонтально шарнирно закрепленную на крышке 1112 кожуха для открытия и закрытия отверстия 1114 для загрузки белья для стирки.
Панель 1115 управления включает в себя функциональные клавиши 1117 для предоставления возможности пользователю управлять рабочим режимом машины 1100 для стирки белья и дисплей 1118, расположенный на одной стороне функциональных клавиш 1117 для отображения рабочего режима машины 1100 для стирки белья.
Функциональные клавиши 1117 и дисплей 1118 панели 1115 управления электрически подключены к контроллеру (не показан). Контроллер (не показан) электрически управляет компонентами машины 1100 для стирки белья.
Между тем, барабан 1122 может содержать автоматический балансир (не показан). Автоматический балансир (не показан) функционирует с возможностью уменьшать вибрацию, формируемую из барабана 1122 вследствие эксцентриситета белья для стирки, принимаемого в барабане 1122. Жидкий балансир или шариковый балансир может использоваться в качестве автоматического балансира (не показан).
Между тем, хотя не показано, машина 1100 для стирки белья дополнительно может включать в себя датчик вибрации для измерения вибрации барабана 1122 или кожуха 1110.
Устройство приведения в действие мотора и машина для стирки белья, включающая в себя его согласно вариантам осуществления настоящего изобретения, не могут ограниченно применяться к конструкции и способу вариантов осуществления, как описано выше; тем не менее, все или некоторые варианты осуществления могут быть избирательно комбинированы, чтобы достигать различных модификаций.
Между тем, способ приведения в действие мотора или способ работы машины для стирки белья согласно вариантам осуществления настоящего изобретения может быть реализован в качестве кода, который является читаемым посредством процессора, включенного в устройство приведения в действие мотора или машину для стирки белья, на носителях записи, читаемых посредством процессора. Носители записи, читаемые посредством процессора, включают в себя все виды устройств записи для того, чтобы сохранять данные, которые являются читаемыми посредством процессора.
Как очевидно из вышеприведенного описания, устройство приведения в действие мотора и машина для стирки белья, включающая в себя его согласно вариантам осуществления настоящего изобретения, представляют собой бездатчиковое устройство приведения в действие мотора, которое не имеет датчика позиции для того, чтобы считывать позицию ротора мотора, и машину для стирки белья, включающую в себя его. В устройстве приведения в действие мотора и в машине для стирки белья, включающей в себя его согласно вариантам осуществления настоящего изобретения, используются резистор, электрически подключенный между инвертором и мотором, и компаратор для того, чтобы сравнивать напряжение, определенное посредством резистора, с опорным напряжением и определять выходное напряжение на основе PWM. Следовательно, можно эффективно и точно определять выходное напряжение, приложенное к мотору.
В частности, выходное импульсное напряжение может быть быстро определено через регулировку уровня на основе деления напряжения без дополнительного преобразования, к примеру, фильтрации нижних частот. Помимо этого, контроллеру инвертора не требуется дополнительный аналого-цифровой преобразователь, так что в итоге может точно вычисляться время включения, т.е. скважность. Между тем, сравнение между выходным напряжением и опорным напряжением выполняется посредством компаратора, так что в итоге можно удалять компонент шума.
В частности, определяется выходное напряжение на основе PWM, оцениваются позиция ротора и частота вращения мотора на основе определенного выходного напряжения, и выводится сигнал управления коммутацией для управления инвертором на основе оцененной позиции ротора и частоты вращения мотора. Следовательно, можно точно управлять мотором в бездатчиковом режиме.
Между тем, неизменяющийся ток первого уровня и неизменяющийся ток второго уровня последовательно подаются в мотор в ходе начала работы мотора. Следовательно, можно точно оценивать сопротивление статора мотора.
Хотя предпочтительные варианты осуществления настоящего изобретения раскрыты для целей иллюстрации, специалисты в данной области техники должны принимать во внимание, что различные модификации, дополнения и замены возможны без отступления от объема изобретения, раскрытого в прилагаемой формуле изобретения.


Раскрываются устройство приведения в действие мотора и машина для стирки белья, включающая в себя его. Машина для стирки белья включает в себя бак для стирки, мотор для того, чтобы вращать бак для стирки, и модуль приведения в действие для того, чтобы приводить в действие мотор, при этом модуль приведения в действие включает в себя инвертор для того, чтобы преобразовывать постоянное напряжение в переменное напряжение и выводить переменное напряжение в мотор, модуль определения выходного напряжения для того, чтобы определять выходное напряжение, приложенное к мотору, и контроллер инвертора для того, чтобы управлять инвертором таким образом, чтобы приводить в действие мотор на основе выходного напряжения, при этом модуль определения выходного напряжения включает в себя резистор, электрически подключенный между инвертором и мотором, и компаратор для того, чтобы сравнивать напряжение, определенное посредством резистора, с опорным напряжением и определять выходное напряжение на основе широтно-импульсной модуляции (PWM). Следовательно, в бездатчиковой машине для стирки белья, которая не имеет датчика позиции для того, чтобы считывать позицию ротора мотора, можно эффективно определять напряжение, приложенное к мотору. 2 н. и 15 з.п. ф-лы, 11 ил.
1. Машина для стирки белья, содержащая:
- бак (120) для стирки;
- мотор (230) для того, чтобы вращать бак для стирки; и
- модуль (220) приведения в действие для того, чтобы приводить в действие мотор,
при этом модуль (220) приведения в действие содержит:
- инвертор (420) для того, чтобы преобразовывать постоянное напряжение в переменное напряжение и выводить переменное напряжение в мотор;
- модуль (F) определения выходного напряжения для того, чтобы определять выходное напряжение, приложенное к мотору; и
- контроллер (430) инвертора для того, чтобы управлять инвертором таким образом, чтобы приводить в действие мотор на основе выходного напряжения, при этом:
модуль (F) определения выходного напряжения содержит:
- резистор (R2), электрически подключенный между инвертором и мотором; и
- компаратор (Ор) для того, чтобы сравнивать напряжение, определенное посредством резистора, с опорным напряжением и выводить импульсное выходное напряжение на основе широтно-импульсной модуляции (PWM),
причем контроллер инвертора включает в себя модуль захвата для захвата импульсного выходного напряжения на основе широтно-импульсной модуляции (PWM) из компаратора и определяет скважность упомянутого определенного импульсного выходного напряжения на основе PWM с использованием модуля захвата и вычисляет фазное напряжение мотора на основании вычисленной скважности.
2. Машина для стирки белья по п. 1, в которой контроллер (430) инвертора выполнен с возможностью оценивать позицию ротора и частоту вращения мотора на основе упомянутого определенного импульсного выходного напряжения на основе PWM и выводить сигнал управления коммутацией для управления инвертором на основе оцененной позиции ротора и частоты вращения мотора.
3. Машина для стирки белья по любому из пп. 1 или 2, дополнительно содержащая:
- модуль (Е) определения выходного тока для того, чтобы определять выходной ток, протекающий в моторе, при этом
контроллер (430) инвертора выполнен с возможностью оценивать позицию ротора мотора на основе упомянутого определенного выходного тока и упомянутого определенного импульсного выходного напряжения на основе PWM и выводить сигнал управления коммутацией инвертора для управления инвертором на основе оцененной позиции ротора мотора.
4. Машина для стирки белья по п. 3, в которой контроллер (430) инвертора содержит:
- модуль (520) оценки для того, чтобы оценивать позицию ротора и частоту вращения мотора на основе упомянутого определенного выходного тока и упомянутого определенного импульсного выходного напряжения на основе PWM;
- модуль (530) формирования команд управления током для того, чтобы формировать значение команды управления током на основе оцененной частоты вращения мотора и значения команды управления частотой вращения;
- модуль (540) формирования команд управления напряжением для того, чтобы формировать значение команды управления напряжением на основе значения команды управления током и упомянутого определенного выходного тока; и
- модуль (550) вывода сигналов управления коммутацией для того, чтобы выводить сигнал управления коммутацией для приведения в действие инвертора на основе значения команды управления напряжением.
5. Машина для стирки белья по п. 4, в которой модуль (520) оценки содержит:
- модуль (523) оценки противоэлектродвижущей силы для того, чтобы оценивать противоэлектродвижущую силу, генерируемую из мотора, на основе упомянутого определенного выходного тока и упомянутого определенного импульсного выходного напряжения на основе PWM; и
- модуль (526) оценки частоты вращения для того, чтобы оценивать позицию ротора и частоту вращения мотора на основе оцененной противоэлектродвижущей силы.
6. Машина для стирки белья по любому из предшествующих пунктов, в которой контроллер (430) инвертора выполнен с возможностью управлять инвертором (420) таким образом, чтобы последовательно подавать неизменяющийся ток первого уровня и неизменяющийся ток второго уровня в мотор в ходе начала работы мотора.
7. Устройство приведения в действие мотора, содержащее:
- инвертор (420) для того, чтобы преобразовывать постоянное напряжение в переменное напряжение и выводить переменное напряжение в мотор;
- модуль (F) определения выходного напряжения для того, чтобы определять выходное напряжение, приложенное к мотору; и
- контроллер (430) инвертора для того, чтобы управлять инвертором таким образом, чтобы приводить в действие мотор на основе выходного напряжения, при этом
модуль (F) определения выходного напряжения содержит:
- резистор (R2), электрически подключенный между инвертором и мотором; и
- компаратор (Ор) для того, чтобы сравнивать напряжение, определенное посредством резистора, с опорным напряжением и определять импульсное выходное напряжение на основе PWM,
причем контроллер инвертора включает в себя модуль захвата для захвата импульсного выходного напряжения на основе широтно-импульсной модуляции (PWM) из компаратора и определяет скважность упомянутого определенного импульсного выходного напряжения на основе PWM с использованием модуля захвата и вычисляет фазное напряжение мотора на основании вычисленной скважности.
8. Устройство приведения в действие мотора по п. 7, в котором контроллер (430) инвертора выполнен с возможностью оценивать позицию ротора и частоту вращения мотора на основе упомянутого определенного импульсного выходного напряжения на основе PWM и выводить сигнал управления коммутацией для управления инвертором на основе оцененной позиции ротора и частоты вращения мотора.
9. Устройство приведения в действие мотора по п. 7 или 8, в котором контроллер (430) инвертора выполнен с возможностью вычислять скважность упомянутого определенного импульсного выходного напряжения на основе PWM и вычислять фазное напряжение мотора на основе вычисленной скважности.
10. Устройство приведения в действие мотора по любому из пп. 7-9, дополнительно содержащее:
- модуль (Е) определения выходного тока для того, чтобы определять выходной ток, протекающий в моторе, при этом
контроллер (430) инвертора выполнен с возможностью оценивать позицию ротора мотора на основе упомянутого определенного выходного тока и упомянутого определенного импульсного выходного напряжения на основе PWM и выводить сигнал управления коммутацией инвертора для управления инвертором на основе оцененной позиции ротора мотора.
11. Устройство приведения в действие мотора по п. 10, в котором контроллер (430) инвертора содержит:
- модуль (520) оценки для того, чтобы оценивать позицию ротора и частоту вращения мотора на основе упомянутого определенного выходного тока и упомянутого определенного импульсного выходного напряжения на основе PWM;
- модуль (530) формирования команд управления током для того, чтобы формировать значение команды управления током на основе оцененной частоты вращения мотора и значения команды управления частотой вращения;
- модуль (540) формирования команд управления напряжением для того, чтобы формировать значение команды управления напряжением на основе значения команды управления током и упомянутого определенного выходного тока; и
- модуль (550) вывода сигналов управления коммутацией для того, чтобы выводить сигнал управления коммутацией для приведения в действие инвертора на основе значения команды управления напряжением.
12. Устройство приведения в действие мотора по п. 11, в котором модуль (520) оценки содержит:
- модуль (523) оценки противоэлектродвижущей силы для того, чтобы оценивать противоэлектродвижущую силу, генерируемую из мотора, на основе упомянутого определенного выходного тока и упомянутого определенного импульсного выходного напряжения на основе PWM; и
- модуль (526) оценки частоты вращения для того, чтобы оценивать позицию ротора и частоту вращения мотора на основе оцененной противоэлектродвижущей силы.
13. Устройство приведения в действие мотора по любому из предшествующих пунктов, в котором контроллер (430) инвертора выполнен с возможностью управлять инвертором (420) таким образом, чтобы последовательно подавать неизменяющийся ток первого уровня и неизменяющийся ток второго уровня в мотор в ходе начала работы мотора.
14. Машина для стирки белья по п. 1, в которой контроллер инвертора вычисляет среднее полюсное напряжение с использованием вычисленной скважности, напряжения на контактных выводах постоянного тока, соответствующего постоянному напряжению в инверторе, и единичного периода времени несущего сигнала.
15. Машина для стирки белья по п. 14, в которой после вычисления среднего полюсного напряжения контроллер инвертора вычисляет напряжение смещения, трехфазные напряжения, двухфазные напряжения неподвижной системы координат, оцененную противоэлектродвижущую силу, оцененную позицию и оцененную частоту вращения.
16. Устройство приведения в действие мотора по п. 8, в котором контроллер инвертора вычисляет среднее полюсное напряжение с использованием вычисленной скважности, напряжения на контактных выводах постоянного тока, соответствующего постоянному напряжению в инверторе, и единичного периода времени несущего сигнала.
17. Устройство приведения в действие мотора по п. 16, в котором после вычисления среднего полюсного напряжения контроллер инвертора вычисляет напряжение смещения, трехфазные напряжения, двухфазные напряжения неподвижной системы координат, оцененную противоэлектродвижущую силу, оцененную позицию и оцененную частоту вращения.
| JP 20011238480 A, 31.08.2001 | |||
| US 7330011 B2, 12.02.2008 | |||
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ЭЛЕКТРОЭНЕРГИИ | 2009 |
|
RU2462806C1 |

