Область техники, к которой относится изобретение
Изобретение относится к устройству, способу и компьютерной программе для определения свойств для определения свойства объекта. Кроме того изобретение относится к устройству для воздействия на объект, содержащему устройство определения свойств, к соответствующему способу воздействия на объект и к соответствующей компьютерной программе для воздействия на объект.
Уровень техники
US 2005/0283074 A1 раскрывает способ обнаружения образования пузырьков в ходе процедуры абляции ткани. В частности, для обнаружения образования пузырьков и для управления процедурой абляции используют ультразвуковую визуализацию. Обнаруженное образование пузырьков может быть измерено, чтобы помочь в управлении и диагностировании в ходе процедуры абляции, при этом сигналы могут быть сформированы на основе обнаружения изменений в характеристиках пузырьков. Например, устройство может быть выполнено с возможностью обнаруживать определенный тип образования пузырьков и формировать предупреждающий звуковой или видеосигнал, зависящий от обнаруженного типа образования пузырьков. В другом примере устройство может быть выполнено с возможностью переключать формирование управляющего сигнала для увеличения, уменьшения или прекращения подачи энергии абляции в зависимости от обнаруженного типа образования пузырьков.
WO 2006/064495 A1 раскрывает способ мониторинга теплового повреждения ткани во время операции абляции теплом. При абляции определенной части ткани обнаруживают ультразвуковые изображения соседних частей ткани, и из этих ультразвуковых изображений извлекают параметр, который служит признаком биологической реакции соседних частей ткани на тепло. В варианте осуществления параметром является накопление пузырьков, и повреждение соседних частей ткани определяется на основании этого параметра. Цель этого способа мониторинга состоит в определении нежелательных повреждений соседних частей ткани. Следовательно, способ мониторинга отслеживает возможное повреждение ткани посредством наблюдения пространственных и временных изменений в ультразвуковых изображениях и посредством связывания этих изменений с образованием пузырьков. Этот мониторинг приводит к неточностям в определении возможных повреждений ткани, поскольку образование пузырьков отражает только высокую температуру в ткани, но не связано непосредственно со степенью повреждения ткани.
Раскрытие изобретения
Задача настоящего изобретения состоит в создании устройства определения свойств, при этом свойство объекта может быть определено с повышенной точностью. Дополнительная задача настоящего изобретения состоит в создании устройства воздействия на объект, содержащего устройство определения свойств, и создании соответствующих способов и компьютерных программ.
В первом аспекте настоящего изобретения представлено устройство определения свойств для определения свойства биологического объекта, при этом устройство определения свойств содержит:
- модуль обеспечения ультразвуковых сигналов для обеспечения ультразвукового сигнала, формируемого посредством:
- отправки ультразвукового импульса в объект,
- приема последовательности эхо-сигналов из объекта, и
- формирования ультразвукового сигнала в зависимости от принимаемой последовательности эхо-сигналов,
- модуль определения рассеяния для определения по меньшей мере одного значения рассеяния, указывающего на рассеяние ультразвукового импульса посредством перфузии объекта жидкостью, при этом модуль определения рассеяния выполнен с возможностью определять по меньшей мере одно значение рассеяния в зависимости от ультразвукового сигнала,
- модуль определения свойств для определения свойства объекта, которое связано с перфузией объекта жидкостью, в зависимости по меньшей мере от одного значения рассеяния.
Поскольку модуль определения рассеяния определяет по меньшей мере одно значение рассеяния, указывающее на рассеяние ультразвукового импульса жидкостью, и поскольку модуль определения свойств выполнен с возможностью определять свойство объекта в зависимости по меньшей мере от одного значения рассеяния, свойство, которое связано с перфузией жидкостью, может быть определено непосредственно на основании по меньшей мере одного значения рассеяния. Таким образом, необязательно использовать весьма косвенный показатель, такой как определение образования пузырьков, который отражает высокую температуру в ткани, но который не связан непосредственно, например, со степенью повреждения ткани, для определения свойства объекта. Это повышает точность определения свойства объекта.
Модуль определения рассеяния может быть выполнен с возможностью определять несколько значений рассеяния, при этом модуль определения свойств может быть выполнен с возможностью определять свойство на основании нескольких значений рассеяния.
Модуль обеспечения ультразвуковых сигналов может быть модулем хранения, в котором уже сохранен ультразвуковой сигнал, или модуль обеспечения ультразвуковых сигналов может быть модулем приема данных, таким как проводное или беспроводное соединение для передачи данных для приема измеренного ультразвукового сигнала. Кроме того, модуль обеспечения ультразвуковых сигналов может формироваться посредством одного или нескольких ультразвуковых преобразователей для формирования ультразвукового сигнала, при этом идентичный ультразвуковой преобразователь может отправлять ультразвуковые импульсы и принимать последовательность эхо-сигналов, или первый ультразвуковой преобразователь может отправлять ультразвуковые импульсы, а другой, второй ультразвуковой преобразователь может принимать последовательность эхо-сигналов.
Модуль обеспечения ультразвуковых сигналов предпочтительно выполнен с возможностью обеспечения ультразвукового сигнала для различных времен и различных глубин в объекте. Обеспечиваемым ультразвуковым сигналом предпочтительно является изображение M-режима.
Объектом предпочтительно является орган человека или животного, при этом орган перфузируется телесной жидкостью, такой как кровь. В частности, объектом предпочтительно является сердце, при этом ткань сердца перфузируется кровью. Кроме того, предпочтительно, чтобы устройство определения свойств было выполнено с возможностью определять степень перфузии, в частности, капиллярной перфузии объекта жидкостью в качестве свойства на основании по меньшей мере одного значения рассеяния. В частности, модуль определения свойств выполнен с возможностью определять то, какая часть объекта перфузируется, а какая часть объекта не перфузируется. Поскольку по меньшей мере одно значение рассеяния служит признаком рассеяния ультразвукового импульса жидкостью, степень перфузии объекта, в частности, то, перфузируется или не перфузируется объект либо часть объекта, может быть определена на основании по меньшей мере одного значения рассеяния, т.е. если объект не перфузируется жидкостью, модуль определения рассеяния может определять значение рассеяния, указывающее на отсутствие жидкости, и модуль определения свойств может определять, например, что объект не перфузируется, а если объект перфузируется жидкостью, модуль определения рассеяния может определять значение рассеяния, указывающее на наличие жидкости, и модуль определения свойств может определять, например, что объект перфузируется.
Объектом является биологический объект, такой как сердце или другой орган, содержащий ткань, при этом модуль определения свойств может быть выполнен с возможностью определять то, содержит часть ткани аблированную ткань или неаблированную ткань, на основании по меньшей мере одного значения рассеяния в качестве свойства объекта. В частности, модуль определения свойств выполнен с возможностью определять то, какая часть ткани аблирована, а какая часть ткани не аблирована. Посредством абляции перфузия объекта может быть модифицирована, при этом модификация перфузии может модифицировать рассеяние ультразвукового импульса жидкостью и, таким образом по меньшей мере одно значение рассеяния. Модификация по меньшей мере одного значения рассеяния, следовательно, может использоваться для определения степени абляции. Например, посредством измерений, проводимых для калибровки, можно определять то, какие значения рассеяния или какие изменения значений рассеяния после того, как операция абляции начата, соответствуют каким степеням абляции, при этом значения рассеяния определяют, тогда как степень абляции известна. Эти определенные значения рассеяния могут рассматриваться в качестве значений, используемых для калибровки, при этом значения, используемые для калибровки, затем могут использоваться для определения степени абляции в зависимости от фактически определенных значений рассеяния.
Средство для улучшения перфузии через ткань может применяться к ткани. Таким средством является, например, сосудорасширяющее средство, к примеру, изопротеренол. Если перфузия улучшается, различия в рассеянии ультразвукового импульса посредством аблированной ткани и рассеянии ультразвукового импульса посредством неаблированной ткани могут быть увеличены, поскольку перфузия неаблированной ткани и соответствующее рассеяние жидкостью неаблированной ткани будут увеличиваться, тогда как поскольку аблированная ткань не перфузируется или только незначительно перфузируется, рассеивание в области аблированной ткани не будет увеличиваться или увеличивается незначительно. Это дополнительно повышает точность различения между аблированной тканью и неаблированной тканью.
Кроме того, предпочтительно, чтобы модуль определения свойств был выполнен с возможностью определять то, какая часть ткани является аблированной тканью, а какая часть ткани является неаблированной тканью, и определять глубину абляции в зависимости от этих определенных частей ткани. Поскольку после того, как определено то, какая часть ткани является аблированной тканью, а какая часть ткани является неаблированной тканью, пространственное распределение аблированных и неаблированных областей в ткани известно, глубина абляции может легко быть определена из определенных аблированных и неаблированных частей ткани.
Кроме того, предпочтительно, чтобы обеспечиваемый ультразвуковой сигнал представлял рассеяние жидкостью по меньшей мере в одном из a) различных глубин в объекте и b) различных моментов времени, причем ультразвуковой сигнал дискретизируют посредством окон дискретизации, соответствующих по меньшей мере одному из a) различных глубин и b) различных моментов времени, при этом модуль определения значений рассеяния выполнен с возможностью определять значения рассеяния для окон дискретизации, причем для соответствующего окна дискретизации по меньшей мере одно значение рассеяния определяют на основании части ультразвукового сигнала, который соответствует надлежащему окну дискретизации, при этом модуль определения свойств выполнен с возможностью определять свойство для соответствующего окна дискретизации на основании по меньшей мере одного значения рассеяния, определенного для соответствующего окна дискретизации. Если, например, ультразвуковым сигналом является изображение M-режима, изображение M-режима может быть дискретизировано посредством нескольких окон дискретизации, соответствующих определенным диапазонам глубин и определенным диапазонам времени. Для каждого из окон дискретизации может быть определено по меньшей мере одно значение рассеяния, при этом для каждого из окон дискретизации свойство, в частности, то, аблирована или не аблирована ткань в соответствующем окне дискретизации, может быть определено на основании по меньшей мере одного значения рассеяния, определенного для соответствующего окна дискретизации. Это дает возможность мониторинга свойства во времени и на различных глубинах. В частности, свойство может отслеживаться в реальном времени. Например, глубина абляции может отслеживаться в реальном времени.
Окна дискретизации предпочтительно перекрываются, поскольку в таком случае разрешение определения свойства объекта может быть увеличено без уменьшения размера окна дискретизации. Тем не менее, окна дискретизации также могут быть неперекрывающимися.
Кроме того, предпочтительно, чтобы каждое из окон дискретизации соответствовало нескольким ультразвуковым интенсивностям ультразвукового сигнала, при этом модуль определения рассеяния выполнен с возможностью определять по меньшей мере одно значение рассеяния для окна дискретизации в зависимости от гистограммы ультразвуковых интенсивностей в соответствующем окне дискретизации. Таким образом, предпочтительно, для каждого из окон дискретизации по меньшей мере одно значение рассеяния определяют в зависимости от гистограммы ультразвуковых интенсивностей соответствующего окна дискретизации. В частности, модуль определения рассеяния выполнен с возможностью определять по меньшей мере одно значение рассеяния на основании по меньшей мере одного из гистограммы первого порядка и гистограммы второго порядка. Также может использоваться статистика высшего порядка для определения по меньшей мере одного значения рассеяния, например, может использоваться подход на основании фильтрации Габора для определения по меньшей мере одного значения рассеяния.
Кроме того, предпочтительно, чтобы модуль определения рассеяния был выполнен с возможностью определять по меньшей мере одно из следующих значений в качестве по меньшей мере одного значения рассеяния: среднее значение первого порядка гистограммы первого порядка, дисперсию первого порядка гистограммы первого порядка, энтропию первого порядка гистограммы первого порядка, энтропию второго порядка гистограммы второго порядка, энергию второго порядка гистограммы второго порядка, однородность второго порядка гистограммы второго порядка, контрастность второго порядка гистограммы второго порядка, тенденцию кластеризации второго порядка гистограммы второго порядка, форму второго порядка гистограммы второго порядка, корреляцию второго порядка гистограммы второго порядка и корреляционную производную второго порядка гистограммы второго порядка.
В варианте осуществления, каждое из окон дискретизации соответствует нескольким ультразвуковым интенсивностям ультразвукового сигнала, при этом модуль определения рассеяния выполнен с возможностью определять по меньшей мере одно значение рассеяния для окна дискретизации в зависимости от суммирования ультразвуковых интенсивностей в соответствующем окне дискретизации. Таким образом, в дополнение или альтернативно использованию значений рассеяния на основании гистограммы, также могут быть использованы значения рассеяния, которые зависят от суммирования ультразвуковых интенсивностей в соответствующем окне дискретизации. Например, значение рассеяния может быть суммой по всем ультразвуковым интенсивностям в соответствующем окне дискретизации или суммой по произведениям ультразвуковых интенсивностей, при этом по меньшей мере одна из ультразвуковых интенсивностей каждой пары находится в соответствующем окне дискретизации, и при этом каждое произведение содержит ультразвуковые интенсивности, которые соответствуют временам обнаружения, которые разделены периодом сердечного цикла объекта, если объектом является сердечная ткань. Если значения рассеяния на основании гистограммы и те значения рассеяния на основании суммирования, которые предпочтительно не основаны на гистограмме, используются вместе для определения свойства объекта, может быть дополнительно повышена точность определения свойства объекта.
Кроме того, предпочтительно, чтобы модуль определения свойств был выполнен с возможностью применять кластерный анализ к окнам дискретизации, при этом окна дискретизации кластеризуют в зависимости по меньшей мере от одного значения рассеяния, определенного для соответствующего окна дискретизации, и назначать свойства кластерам окон дискретизации. Модуль определения свойств может быть выполнен с возможностью осуществлять алгоритм кластеризации, такой как кластеризация методом k-средних для группировки значений рассеяния. Если для каждого окна дискретизации определено только одно значение рассеяния, алгоритм кластеризации применяют к одним значениям рассеяния, а если для каждого окна дискретизации определены несколько значений рассеяния, значения рассеяния, которые определены для одного окна дискретизации, формируют многомерный вектор признаков, и алгоритм кластеризации применяют к многомерным векторам признаков, определенным для нескольких окон дискретизации. Алгоритм кластеризации может приводить к первому кластеру значений рассеяния или многомерных векторов признаков, соответственно, и, таким образом, к соответствующему первому кластеру окон дискретизации и ко второму кластеру значений рассеяния или многомерных векторов признаков, соответственно, и, таким образом, к соответствующему второму кластеру окон дискретизации. Первый кластер окон дискретизации может представлять аблированную ткань, а второй кластер окон дискретизации может представлять неаблированную ткань. То, представляет кластер аблированную или неаблированную ткань, может быть определено в зависимости от сравнения с пороговым значением, которое может быть определено посредством измерений, проводимых для калибровки. Таким образом, назначение свойств объекта кластеру окон дискретизации может быть выполнено посредством пороговой обработки. Также возможно то, что кластерный анализ применяют сначала до того, как начинается абляция, приводя к первой группе кластеров, представляющих неаблированную ткань. Затем кластерный анализ непрерывно применяют в то время, когда выполняется операция абляции. Если кластерный анализ приводит к новым кластерам, которые не принадлежат первой группе кластеров, свойство «аблированная ткань» может быть назначено этим новым кластерам.
Модуль определения свойств может быть выполнен с возможностью определять свойство на основании сравнения по меньшей мере одного значения рассеяния по меньшей мере с одним пороговым значением. Например, ультразвуковой сигнал может быть дискретизирован посредством использования вышеуказанных окон дискретизации, и для каждого окна дискретизации может быть определено по меньшей мере одно значение рассеяния. Может быть задано, что если значение рассеяния окна дискретизации превышает пороговое значение, ткань, которая соответствует окну дискретизации, не аблирована, и что если значение рассеяния ниже порогового значения, ткань, которая соответствует этому окну дискретизации, аблирована. Если несколько значений рассеяния определены для идентичного окна дискретизации, для каждого значения рассеяния может быть обеспечено пороговое значение, и для каждого значения рассеяния можно определять, превышает или ниже соответствующее значение рассеяния соответствующего порогового значения. Если, например, большинство значений рассеяния окна дискретизации превышает соответствующее пороговое значение, может быть задано, что ткань, которая соответствует окну дискретизации, не аблирована, а если, например, большинство значений рассеяния ниже соответствующего порогового значения, может быть задано, что ткань, которая соответствует окну дискретизации, аблирована. Одно или несколько пороговых значений могут быть определены посредством, например, измерений, проводимых для калибровки. Если для окна дискретизации определены несколько значений рассеяния, они могут быть комбинированы в многомерный вектор признаков, т.е. для каждого окна дискретизации может быть задан многомерный вектор признаков, при этом многомерный вектор признаков может сравниваться с вектором пороговых значений для определения того, соответствует надлежащий интервал дискретизации аблированной ткани или неаблированной ткани.
Кроме того, предпочтительно, чтобы модуль обеспечения ультразвуковых сигналов был выполнен с возможностью обеспечения ультразвукового сигнала, формируемого путем использования ультразвуковых волн с частотой, превышающей 10 МГц. Ультразвуковые волны предпочтительно имеют частоту в диапазоне частот 20-40 МГц, в частности, частоту в 30 МГц. Использование этих относительно высоких ультразвуковых частот приводит к увеличенному разрешению ультразвукового сигнала. Поскольку разрешение ультразвукового сигнала увеличено, структуры ультразвукового сигнала, обусловленные рассеянием ультразвукового импульса жидкостью, могут лучше распознаваться в ультразвуковом сигнале. Следовательно, повышается извлечение по меньшей мере одного значения рассеяния из ультразвукового сигнала и таким образом качество определенного свойства.
Кроме того, предпочтительно, чтобы модуль обеспечения ультразвуковых сигналов был ультразвуковым преобразователем, интегрированным в катетер или иглу. Это позволяет использовать устройство определения свойств для определения свойства, например, сердца или другого органа пациента, при этом по меньшей мере ультразвуковой преобразователь может быть введен внутрь пациента.
Модуль определения свойств также может быть выполнен с возможностью определять то, содержит или нет определенная часть объекта сосуд, в частности, артерию или жилу, на основании определенного по меньшей мере одного значения рассеяния. В частности по меньшей мере одно значение рассеяния может сравниваться с предварительно заданным диапазоном значений рассеяния, ассоциированным с сосудом, при этом если по меньшей мере одно значение рассеяния находится в предварительно заданном диапазоне значений рассеяния, определяется то, что частью объекта является сосуд. Также предварительно заданный диапазон значений рассеяния может быть определен посредством измерений, проводимых для калибровки, при этом значения рассеяния определяются, тогда как тип объекта известен.
В другом аспекте настоящего изобретения представлено устройство воздействия на объект для воздействия на биологический объект, при этом устройство воздействия на объект содержит модуль воздействия на объект для воздействия на объект и устройство определения свойств по пункту 1 формулы. Устройством воздействия на объект предпочтительно является устройство для абляции для абляции органа человека или животного такого как сердце. Модуль воздействия на объект предпочтительно содержит электрод для абляции и источник энергии, который подключен к электроду для абляции, для нагрева объекта посредством, например, радиочастотной (RF) энергии. Вместо выполнения с возможностью проведения операции RF-абляции, устройство для абляции также может быть выполнено с возможностью проводить другой вид абляции, такой как оптическая абляция, криоабляция, ультразвуковая абляция, микроволновая абляция и т.д.
Устройство воздействия на объект предпочтительно содержит модуль управления для управления модулем воздействия на объект, при этом модуль управления выполнен с возможностью управлять модулем воздействия на объект в зависимости от свойства объекта, которое определяют посредством модуля определения свойств из устройства определения свойств. Как уже упомянуто выше, свойством объекта является, например, глубина абляции. Если устройством воздействия на объект является устройство для абляции, которым управляют в зависимости от глубины абляции, устройство для абляции может управляться таким образом, что может достигаться требуемая глубина абляции. Кроме того, можно определять то, находится или нет сосуд, в частности, артерия или жила, впереди электрода для абляции, в качестве свойства объекта. Устройство для абляции, например, может управляться таким образом, что абляция не начинается, или абляция останавливается, если определен сосуд впереди электрода для абляции. В общем, посредством управления абляцией объекта в зависимости от определенного свойства объекта может быть усовершенствована абляция объекта.
В другом аспекте настоящего изобретения представлен способ определения свойств для определения свойства биологического объекта, при этом способ определения свойств содержит:
- обеспечение ультразвукового сигнала, формируемого путем:
- отправку ультразвукового импульса в объект,
- прием последовательности эхо-сигналов от объекта, и
- формирование ультразвукового сигнала в зависимости от принимаемой последовательности эхо-сигналов,
- определение по меньшей мере одного значения рассеяния, указывающего на рассеяние ультразвукового импульса за счет перфузии объекта жидкостью, при этом по меньшей мере одно значение рассеяния определяют в зависимости от ультразвукового сигнала,
- определение свойства объекта, которое связано с перфузией объекта жидкостью, в зависимости по меньшей мере от одного значения рассеяния.
В другом аспекте настоящего изобретения представлен способ воздействия на объект для воздействия на объект, при этом способ воздействия на объект содержит воздействие на объект и этапы вышеупомянутого способа определения свойств. Предпочтительно, способ воздействия на объект содержит этап управления воздействием на объект в зависимости от определенного свойства объекта. Способом воздействия на объект предпочтительно является способ абляции для абляции объекта, при этом предпочтительно абляцией объекта управляют в зависимости от определенного свойства объекта, в частности, в зависимости от определенной глубины абляции. Глубина абляции может быть определена в реальном времени, чтобы управлять абляцией объекта, в то время как объект аблирован.
В другом аспекте настоящего изобретения представлена компьютерная программа для определения свойств для определения свойства биологического объекта, при этом компьютерная программа для определения свойств содержит программное кодовое средство, побуждающее устройство определения свойств по пункту 1 выполнять следующие этапы, когда компьютерная программа выполняется на компьютере, управляющем устройством определения свойств:
- обеспечения ультразвукового сигнала, формируемого путем:
- отправки ультразвукового импульса в объект,
- приема последовательности эхо-сигналов из объекта, и
- формирования ультразвукового сигнала в зависимости от принимаемой последовательности эхо-сигналов,
- определения по меньшей мере одного значения рассеяния, указывающего на рассеяние ультразвукового импульса жидкостью, перфузирующей объект, при этом по меньшей мере одно значение рассеяния определяют в зависимости от ультразвукового сигнала,
- определения свойства объекта, которое связано с перфузией объекта жидкостью, в зависимости от по меньшей мере одного значения рассеяния.
В другом аспекте настоящего изобретения представлена компьютерная программа для воздействия на объект для воздействия на биологический объект, при этом компьютерная программа для воздействия на объект содержит программное кодовое средство, побуждающее устройство воздействия на объект по пункту 11 выполнять воздействие на объект и следующие этапы, когда компьютерная программа выполняется на компьютере, управляющем устройством воздействия на объект:
- обеспечения ультразвукового сигнала, формируемого путем:
- отправки ультразвукового импульса в объект,
- приема последовательности эхо-сигналов из объекта, и
- формирования ультразвукового сигнала в зависимости от принимаемой последовательности эхо-сигналов,
- определения по меньшей мере одного значения рассеяния, указывающего на рассеяние ультразвукового импульса жидкостью, перфузирующей объект, при этом по меньшей мере одно значение рассеяния определяют в зависимости от ультразвукового сигнала,
- определения свойства объекта, которое связано с перфузией объекта жидкостью, в зависимости от по меньшей мере одного значения рассеяния.
Следует понимать, что устройство определения свойств по пункту 1 формулы, устройство воздействия на объект по пункту 11 формулы, способ определения свойств, способ воздействия на объект, компьютерная программа для определения свойств по пункту 12 формулы и компьютерная программа для воздействия на объект по пункту 13 формулы имеют аналогичные и/или идентичные предпочтительные варианты осуществления, в частности, как определено в зависимых пунктах формулы изобретения.
Следует понимать, что предпочтительный вариант осуществления изобретения также может быть любой комбинацией зависимых пунктов формулы изобретения с соответствующим независимым пунктом формулы изобретения.
Эти и другие аспекты изобретения должны становиться очевидными и должны истолковываться со ссылкой на описанные далее варианты осуществления.
Краткое описание чертежей
На следующих чертежах:
Фиг. 1 схематично и примерно показывает вариант осуществления устройства для абляции для абляции объекта,
Фиг. 2 схематично и примерно показывает вариант осуществления наконечника катетера из устройства для абляции,
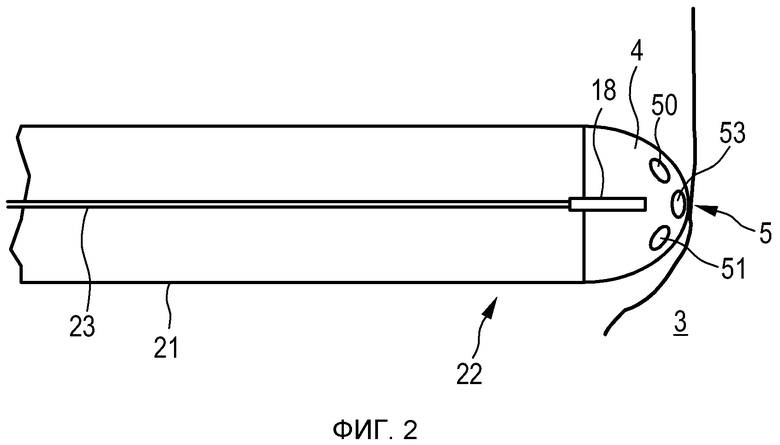
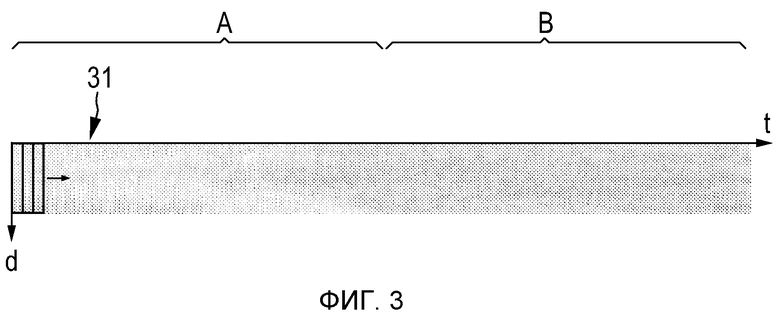
Фиг. 3 примерно показывает изображение M-режима ткани, содержащей аблированную ткань и неаблированную ткань,
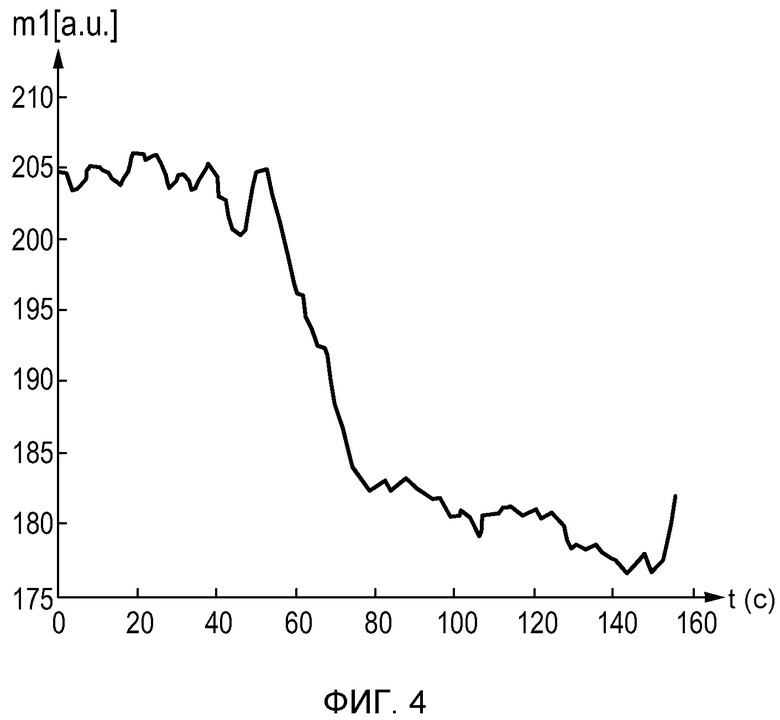
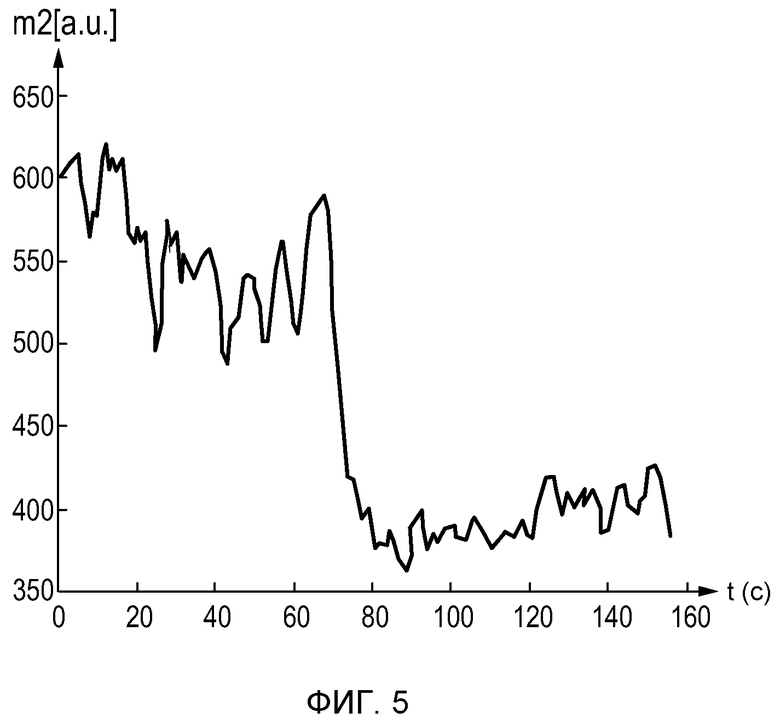
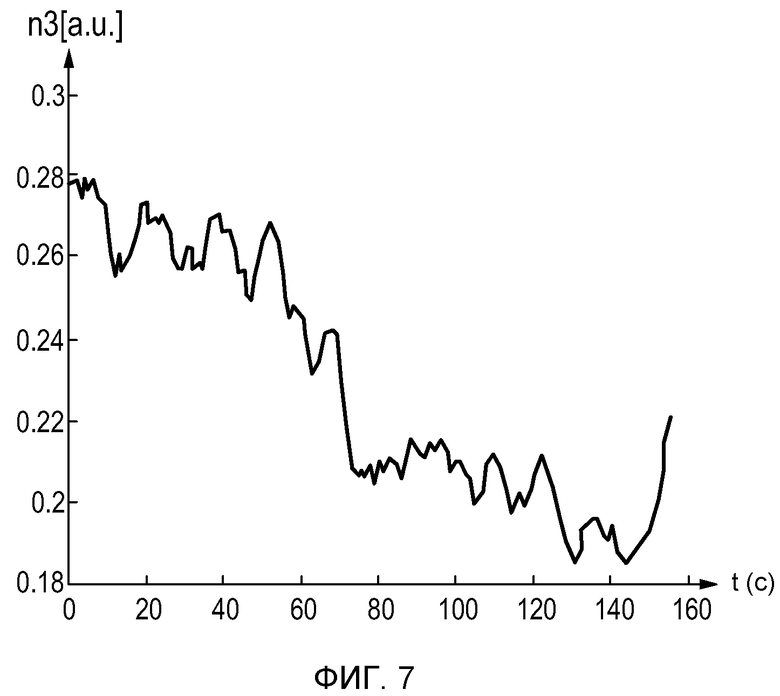
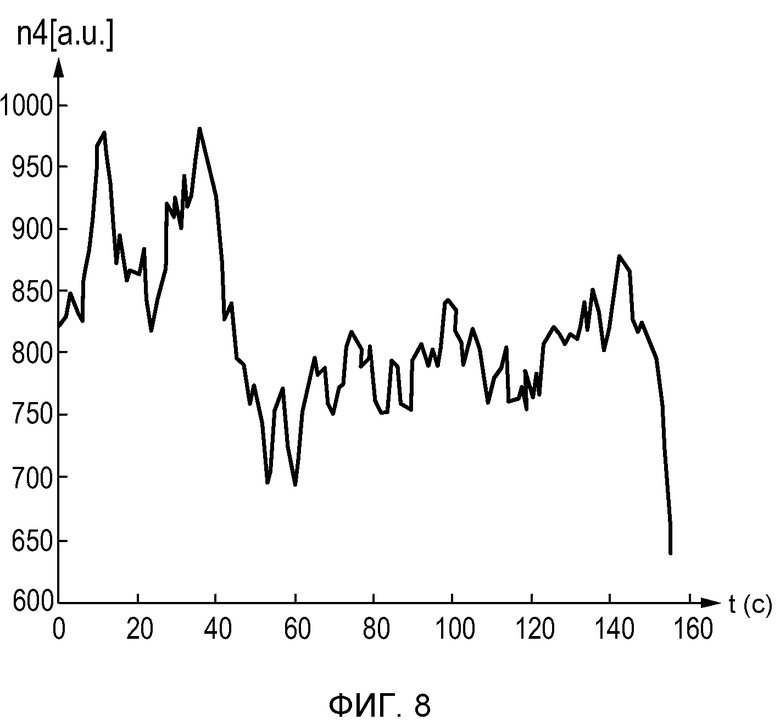
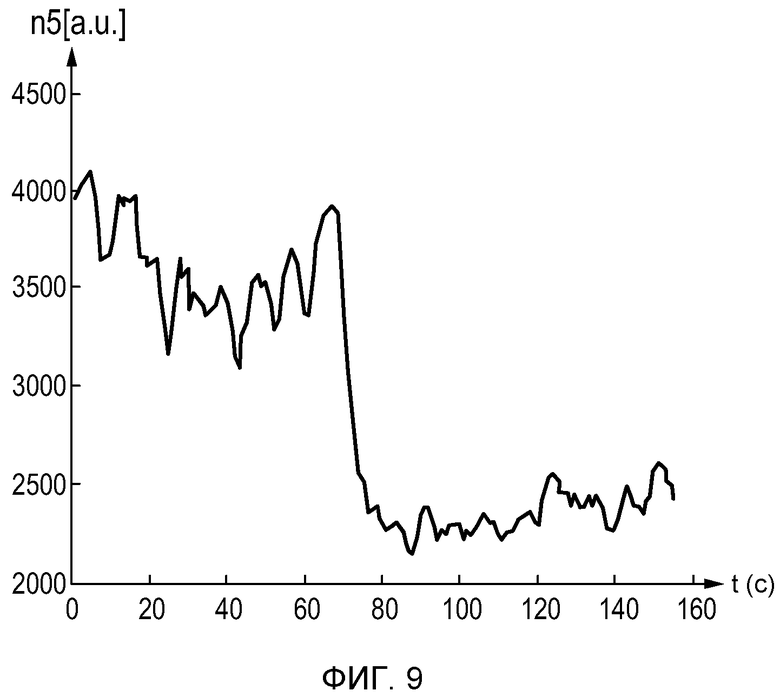
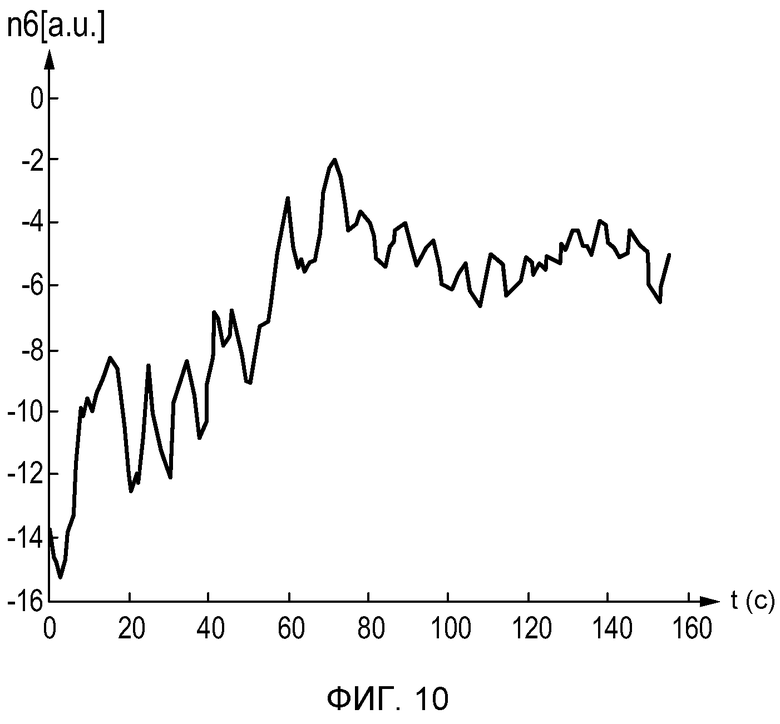
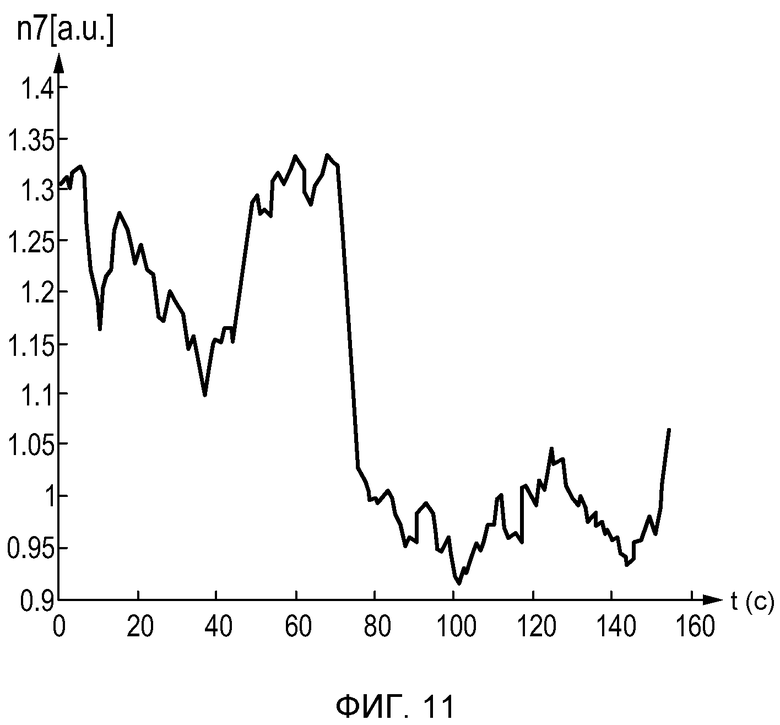
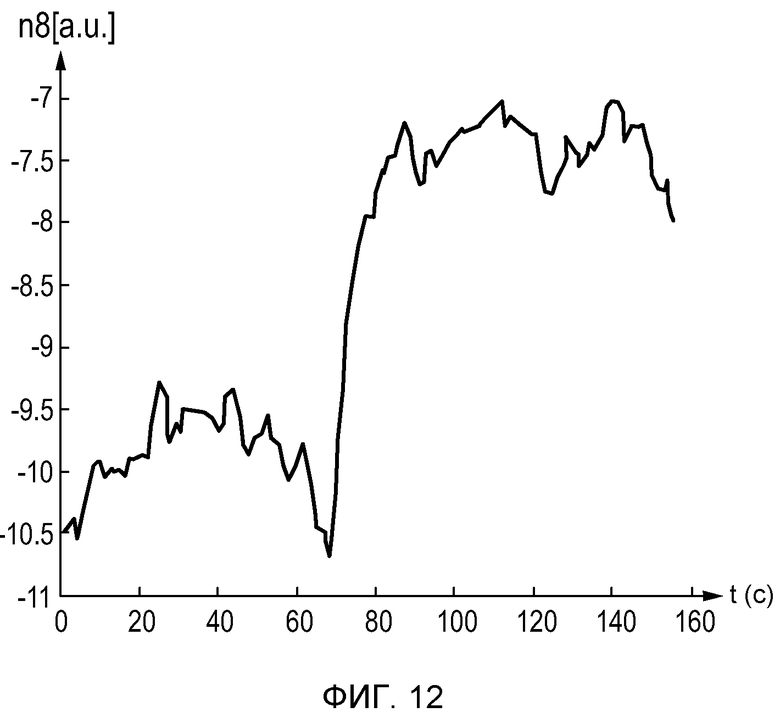
Фиг. 4-13 показывают несколько значений рассеяния в зависимости от времени,
Фиг. 14-16 примерно показывают несколько изображений M-режима объекта и соответствующие результаты кластеризации,
Фиг. 17 и 18 показывают блок-схемы последовательности операций способа, примерно иллюстрирующие алгоритм кластеризации,
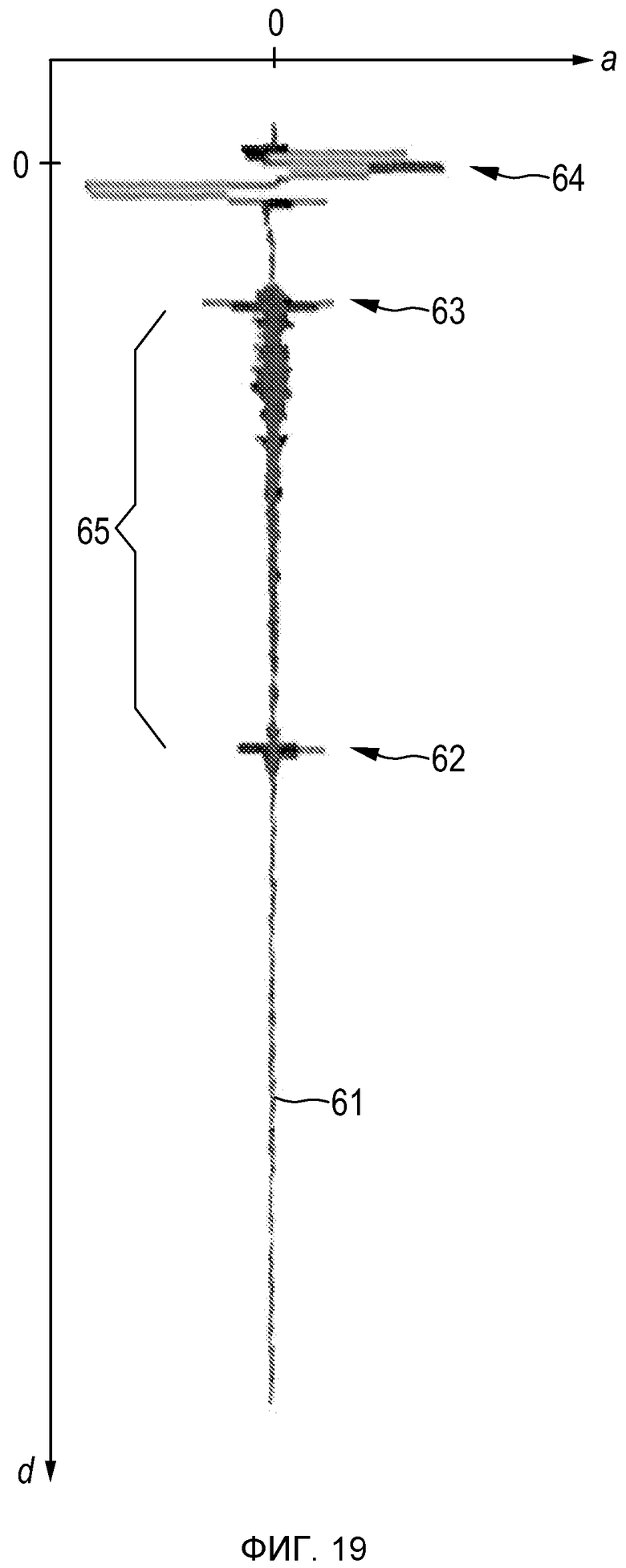
Фиг. 19 показывает A-линию изображения M-режима,
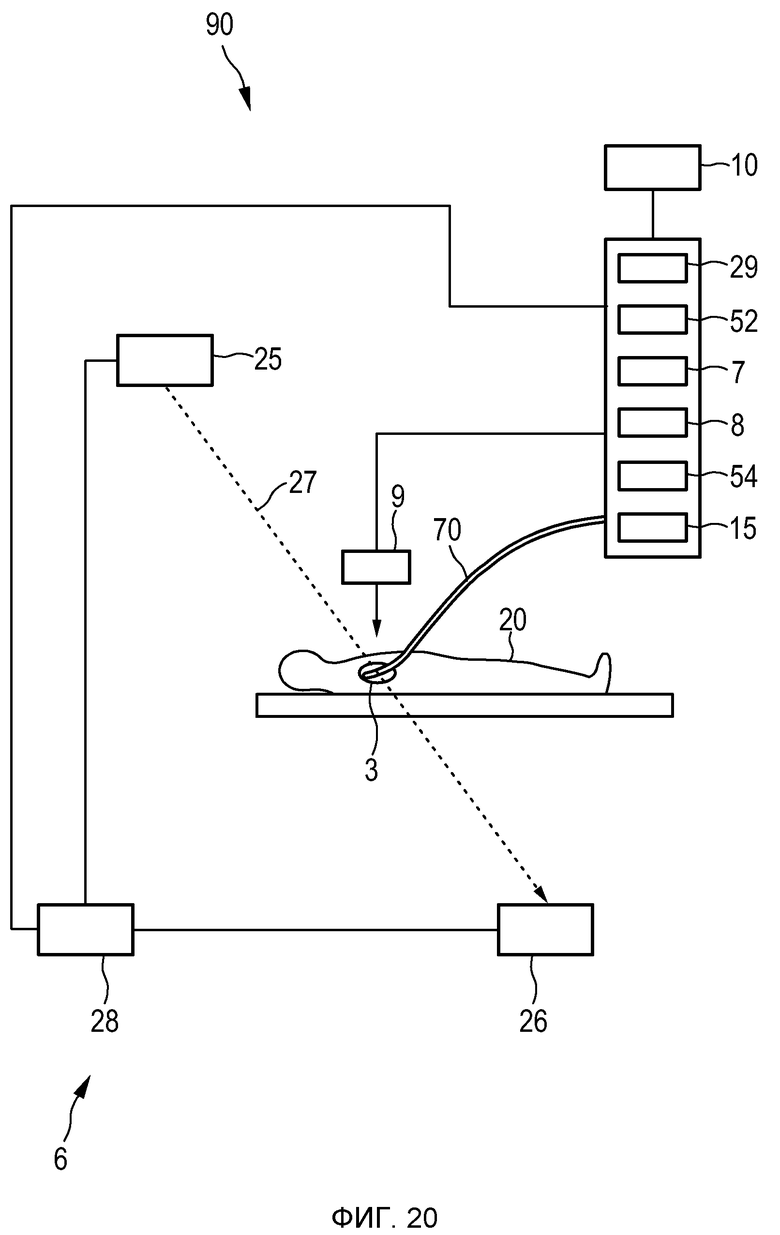
Фиг. 20 схематично и примерно показывает вариант осуществления устройства определения свойств для определения свойства объекта,
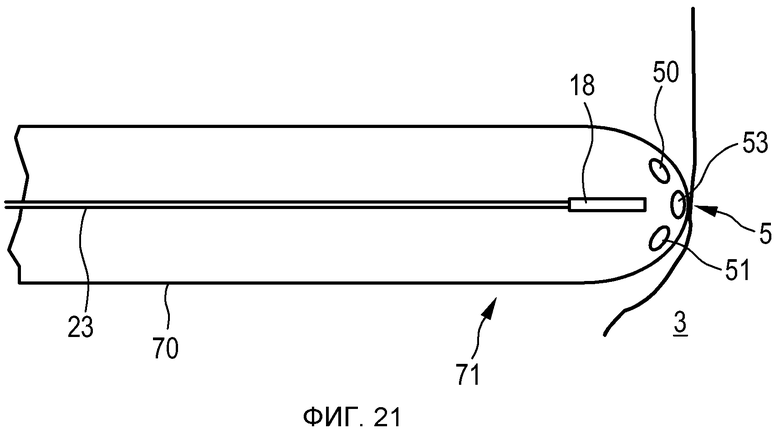
Фиг. 21 схематично и примерно показывает вариант осуществления наконечника катетера из устройства определения свойств,
Фиг. 22 показывает блок-схему последовательности операций, примерно иллюстрирующую вариант осуществления способа определения свойств для определения свойства объекта,
Фиг. 23 показывает блок-схему последовательности операций, примерно иллюстрирующую способ абляции для абляции объекта, и
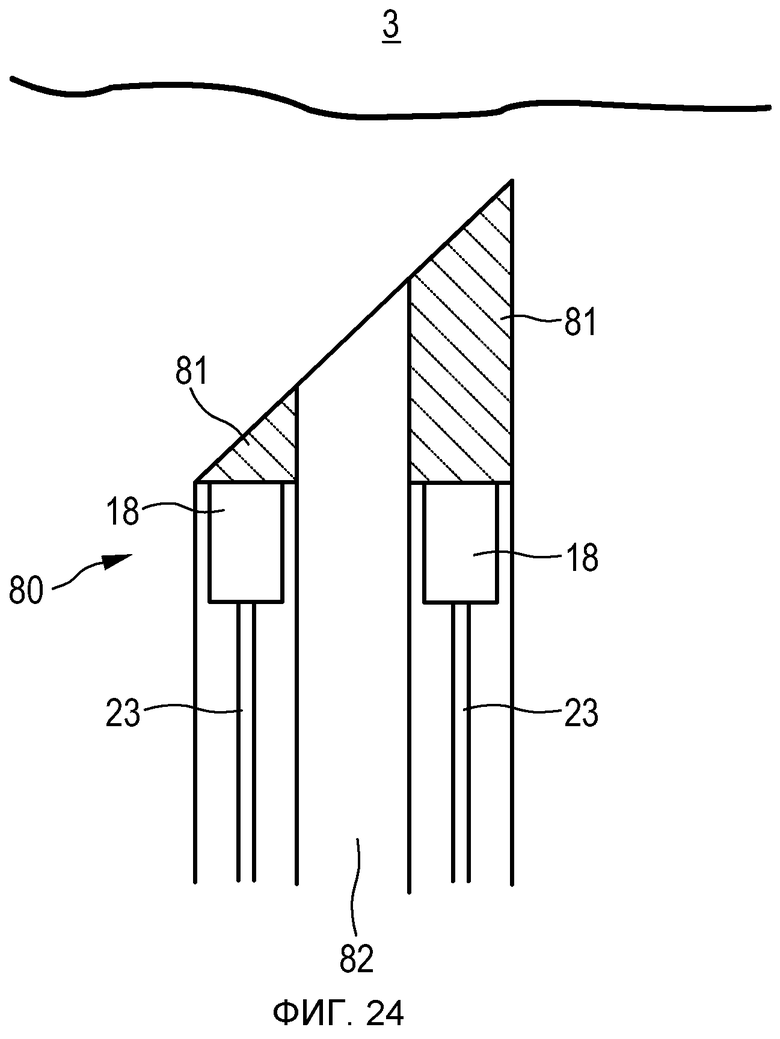
Фиг. 24 схематично и примерно показывает вариант осуществления наконечника биопсийной иглы.
Осуществление изобретения
Фиг. 1 схематично и примерно показывает устройство 1 абляции для абляции объекта.
Устройство 1 для абляции содержит модуль 2 обеспечения изображений для обеспечения изображения объекта 3, которым в этом варианте осуществления является сердце человека 20. Устройство 1 для абляции дополнительно содержит катетер 21 для применения энергии к внутренней стенке сердца 3. Наконечник 22 катетера 21 схематично и примерно показан на фиг. 2. Наконечник 22 катетера содержит электрод 4 для абляции для применения энергии к стенке сердца 3 в местоположении 5 для абляции стенки.
Электрод 4 для абляции соединен с источником 24 энергии через электрическое соединение 23 для обеспечения электроэнергии в местоположение 5. Предпочтительно, источник 24 энергии, электрическое соединение 23 и электрод 4 для абляции выполнены с возможностью применять радиочастотную (RF) энергию к сердцу 3 в местоположении 5. Электрическим соединением 23 предпочтительно является провод. Электрод 4 для абляции, электрическое соединение 23 и источник 24 энергии формируют модуль воздействия на объект.
Наконечник 22 катетера дополнительно содержит модуль 18 обеспечения ультразвуковых сигналов для обеспечения ультразвукового сигнала. Модуль 18 обеспечения ультразвуковых сигналов является ультразвуковым преобразователем, выполненным с возможностью отправки ультразвукового импульса в объект, приема последовательности эхо-сигналов из объекта и формирования ультразвукового сигнала в зависимости от принимаемой последовательности эхо-сигналов. В этом варианте осуществления, модуль 18 обеспечения ультразвуковых сигналов выполнен с возможностью формировать изображение M-режима, которое представляет ультразвуковые свойства сердечной ткани в местоположении 5 на различных глубинах и в различные моменты времени.
Ультразвуковой преобразователь 18 выполнен с возможностью обеспечения ультразвукового сигнала, т.е. изображения M-режима, путем использования ультразвуковых волн с частотой, превышающей 10 МГц. Ультразвуковые волны предпочтительно имеют частоту в диапазоне частот 20-40 МГц, в частности, частоту в 30 МГц.
Наконечник катетера содержит оросительные отверстия 50, 51, 53 для обеспечения возможности выхода оросительной жидкости из наконечника катетера. Оросительная жидкость обеспечивается модулем 52 обеспечения оросительной жидкости. Оросительную жидкость, обеспечиваемую модулем 52 обеспечения оросительной жидкости, вводят в катетер 21, направляют в наконечник 22 катетера и выводят из наконечника 22 катетера через оросительные отверстия 50, 51, 53. Оросительная жидкость используется не только для целей орошения, но также и в качестве акустической передающей среды, задающей акустический тракт для ультразвукового импульса и последовательности эхо-сигналов. Ультразвуковой импульс и последовательность эхо-сигналов предпочтительно передаются через оросительное отверстие 53. Вместо обеспечения оросительного отверстия 53 также может быть использован акустически прозрачный материал, такой как полиметилпентен.
Модуль 2 обеспечения изображений предпочтительно выполнен с возможностью обеспечения электроанатомической карты сердца 3. В этом варианте осуществления, модуль 2 обеспечения изображений является модулем хранения, в котором сохранена электроанатомическая карта. Электроанатомическая карта может быть сформирована посредством формирования трехмерного изображения сердца 3, например, посредством использования системы компьютерной томографии, системы магнитно-резонансной визуализации, системы визуализации на основании ядерных излучений или системы ультразвуковой визуализации либо посредством импедансного, магнитного или электромагнитного отслеживания положения наконечника катетера и посредством измерения электрического свойства сердца в различных местоположениях на стенке сердца, при этом измеренные электрические свойства визуализируются в соответствующих местоположениях в трехмерном изображении сердца.
Например, электроанатомическая карта может быть активационной картой, отражающей активационную последовательность анатомического субстрата. Из этой активационной карты могут извлекаться проводящие структуры, указывающие, например, на зоны поздней активации или замкнутых волн. Информация из активационной карты может быть использована для того, чтобы идентифицировать цели абляции, к которым должна применяться энергия.
Устройство 1 для абляции дополнительно содержит модуль 6, 7 локализации для локализации электрода 4 для абляции в различных местоположениях. Модуль локализации содержит систему 6 рентгеновской флуороскопии с источником 25 рентгеновского излучения и детектором 26 рентгеновского излучения. Источник 25 рентгеновского излучения испускает пучок 27 рентгеновских лучей, который проходит по сердцу 3, в том числе и по наконечнику 22 катетера 21. Пучок рентгеновских лучей, который проходит по сердцу 3, определяется посредством детектора 26 рентгеновского излучения. Детектор 26 рентгеновского излучения формирует электрические сигналы в зависимости от определенного пучка рентгеновских лучей, и электрические сигналы используются посредством модуля 28 управления флуороскопией для формирования рентгеновского проецируемого изображения. Модуль 28 управления флуороскопией также выполнен с возможностью управлять источником 25 рентгеновского излучения и детектором 26 рентгеновского излучения. Источник 25 рентгеновского излучения и детектор 26 рентгеновского излучения могут быть выполнены с возможностью вращения вокруг пациента 20 для обеспечения возможности системе 6 рентгеновской флуороскопии формировать рентгеновские проецируемые изображения в различных направлениях. Системой рентгеновской флуороскопии является, например, система флуороскопии на основании компьютерной томографии или система флуороскопии с использованием C-образной подвижной рамы. Рентгеновские проецируемые изображения вводятся в модуль 7 определения положения для определения положения наконечника 22 катетера, в частности, электрода 4 для абляции и/или ультразвукового преобразователя 18, в сердце 3. Для определения положения наконечника 22 катетера в сердце 3 на основании обеспечиваемых рентгеновских проецируемых изображений могут быть использованы известные способы определения положения. Например, наконечник 22 катетера может быть распознан в различных рентгеновских проецируемых изображениях, что дает возможность модулю определения положения определять траектории рентгеновских лучей, которые вызывают соответствующую проекцию наконечника 22 катетера. Модуль 7 определения положения может быть выполнен с возможностью определять положение наконечника 22 катетера в сердце 3 из пересечения этих траекторий. Альтернативно, трехмерное изображение наконечника 22 катетера в сердце 3 может быть сформировано из рентгеновских проецируемых изображений, например, посредством использования алгоритма обратной проекции, при этом модуль 7 определения положения может быть выполнен с возможностью определять положение наконечника 22 катетера в сердце 3 посредством распознавания наконечника 22 катетера в сердце 3 в сформированном трехмерном изображении. Модуль 7 определения положения также может быть выполнен с возможностью определять ориентацию наконечника 22 катетера.
В других вариантах осуществления, модуль локализации может содержать другое средство, такое как система магнитно-резонансной визуализации или датчики местоположения в наконечнике 22 катетера для определения положения и необязательно также ориентации наконечника 22 катетера в сердце 3. Модуль локализации может быть выполнен с возможностью обеспечивать локализацию наконечника 22 катетера в реальном времени.
Устройство 1 для абляции дополнительно содержит навигационный модуль 29 для обеспечения возможности перемещения катетера 21, в частности, наконечника 22 катетера в требуемое местоположение в объекте 3. Навигационный модуль 29 может быть выполнен с возможностью разрешать пользователю перемещать катетер 21 полностью вручную или полуавтоматически в зависимости от определенного положения и предпочтительно ориентации наконечника 22 катетера. Катетер 22 содержит встроенное направляющее средство (не показано на фиг. 1), которое может управляться посредством навигационного модуля 29. Катетер 29, например, может управляться и перемещаться посредством использования управляющих проводов, чтобы направлять наконечник 22 катетера в требуемое местоположение в объекте 3.
Устройство 1 для абляции дополнительно содержит модуль 8 определения рассеяния для определения по меньшей мере одного значения рассеяния, указывающего на рассеяние ультразвукового импульса кровью в сердечной ткани, при этом модуль 8 определения рассеяния выполнен с возможностью определять по меньшей мере одно значение рассеяния в зависимости от ультразвукового сигнала. Фиг. 3 схематично и примерно показывает ультразвуковой сигнал 30, являющийся изображением M-режима. Изображение M-режима показывает ультразвуковые интенсивности ультразвукового сигнала в зависимости от различных глубин d в ткани в зависимости от времени t. В первом временном интервале, указываемом посредством A, ткань перфузируется кровью, а во втором временном интервале, указываемом посредством B, ткань не перфузируется кровью. Ткань с перфузией крови соответствует неаблированной ткани, а ткань без перфузии крови соответствует аблированной ткани. Изображение M-режима дискретизируется посредством окон 31 дискретизации, которые являются неперекрывающимися и которые идут вдоль всего диапазона глубин изображения M-режима. Модуль 8 определения значений рассеяния выполнен с возможностью определять несколько значений рассеяния для каждого из окон 31 дискретизации в зависимости от гистограммы ультразвуковых интенсивностей в соответствующем окне 31 дискретизации. В частности, модуль 8 определения рассеяния выполнен с возможностью определять значения рассеяния на основании по меньшей мере одного из гистограммы первого порядка и гистограммы второго порядка. Тем не менее, также может использоваться статистика высшего порядка для определения значений рассеяния, например, может использоваться подход на основании фильтрации Габора для определения по меньшей мере одного значения рассеяния.
Модуль 8 определения рассеяния может быть выполнен с возможностью определять несколько из следующих значений в качестве значений рассеяния соответствующего окна 31 дискретизации: среднее значение 











Гистограмма первого порядка является стандартной гистограммой, при этом для различных ультразвуковых интенсивностей, т.е. для различных элементов выборки ультразвуковой интенсивности определяется число 


Дисперсия 



В уравнениях (1)-(3), суммирование выполняется по различным ультразвуковым интенсивностям 
Значения второго порядка предпочтительно основаны на так называемых матрицах смежности, которые, например, раскрыты в книге "Pattern Recognition" авторов S. Theodoridis и др., Academic Press, 2003 год. Значения второго порядка также рассматривают относительные положения ультразвуковых интенсивностей в изображении M-режима и основаны на гистограмме второго порядка, которая может быть задана посредством следующего уравнения:

 , (4)
, (4)
P(i, j)=число пар пикселов на данном расстоянии с интенсивностями i и j/общее число возможных пар,
где переменные 

Энтропия 















Если не указано иное, в уравнениях (5)-(13), суммирование выполняется по ультразвуковым интенсивностям 

Значения рассеяния второго порядка представляют собой значения, указывающие на характеристики структур изображения M-режима, которые связаны с пространственным расположением пикселов изображения M-режима, вместо только контрастности. Эта статистика второго порядка описывает характеристики случайности, регулярности и ориентации структур.
Следует отметить, что модуль 8 определения рассеяния не обязательно определяет все вышеуказанные значения первого порядка и значения второго порядка. Предпочтительно, модуль определения рассеяния выполнен с возможностью определять только виды значений рассеяния, которые дают возможность определения требуемого свойства объекта. Виды значений рассеяния, которые могут использоваться для определения требуемого свойства объекта, могут быть определены посредством измерений, проводимых для калибровки, при этом определяются несколько видов значений рассеяния, тогда как свойство объекта известно. В варианте осуществления, измерение, проводимое для калибровки, раскрывает, что значения 



Модуль 8 определения рассеяния дополнительно может быть выполнен с возможностью определять по меньшей мере одно значение рассеяния для окна дискретизации в зависимости от суммы ультразвуковых интенсивностей в соответствующем окне дискретизации, а не в зависимости от гистограммы. Например, это по меньшей мере одно значение рассеяния может быть суммой по всем ультразвуковым интенсивностям в соответствующем окне дискретизации. По меньшей мере, одно значение рассеяния также может быть задано посредством следующего уравнения:
где 






Устройство для абляции дополнительно содержит модуль 15 определения свойств для определения свойства объекта 3 в зависимости от значений рассеяния, определенных посредством модуля 8 определения рассеяния. В этом варианте осуществления, модуль 15 определения свойств выполнен с возможностью определять то, является часть ткани аблированной тканью или неаблированной тканью, на основании значений рассеяния в качестве свойства объекта. Посредством абляции перфузия ткани может быть модифицирована, при этом модификация перфузии модифицирует рассеяние ультразвукового импульса и, таким образом, значения рассеяния. Значения рассеяния, следовательно, могут использоваться для определения того, аблирована или не аблирована ткань.
В этом варианте осуществления модуль 15 определения свойств выполнен с возможностью определять для каждого из значений рассеяния окна дискретизации мажоритарную выборку для аблированной ткани или неаблированной ткани. Для каждого из этих значений мажоритарная выборка выполняется посредством сравнения соответствующего значения с предварительно заданным пороговым значением, т.е. для каждого из значений выполняется двоичная пороговая обработка для того, чтобы определять для каждого значения мажоритарную выборку. Модуль 15 определения свойств выполнен с возможностью определять окончательный результат, т.е. то, аблирована или не аблирована ткань, которая соответствует надлежащему окну дискретизации, на основании большинства мажоритарных выборок. Это означает то, что если для окна дискретизации определено больше мажоритарных выборок для абляции, чем для не абляции, окончательный результат состоит в том, что ткань, которая соответствует надлежащему окну дискретизации, аблирована, и наоборот. Предварительно заданные пороговые значения могут быть определены посредством, например, измерений, проводимых для калибровки.
Модуль определения свойств также может быть выполнен с возможностью комбинировать несколько значений рассеяния в многомерный вектор признаков, т.е. для каждого окна дискретизации может быть задан многомерный вектор признаков, при этом многомерный вектор признаков может сравниваться с предварительно заданным вектором пороговых значений для определения того, соответствует надлежащий интервал дискретизации аблированной ткани или неаблированной ткани. Также этот предварительно заданный вектор пороговых значений может быть определен посредством, например, измерений, проводимых для калибровки.
Модуль определения свойств также может быть выполнен с возможностью применять кластерный анализ к окнам дискретизации, при этом окна дискретизации кластеризуются в зависимости от многомерных векторов признаков, и назначать свойства кластерам окон дискретизации. Например, кластерный анализ может приводить к двум кластерам окон дискретизации, при этом свойство «аблированная ткань» назначается одному из этих кластеров, а свойство «неаблированная ткань» назначается другому из кластеров. То, представляет ли кластер аблированную или неаблированную ткань, может быть определено в зависимости от сравнения с пороговым значением, при этом, например, многомерные векторы признаков кластера могут быть усреднены для формирования среднего вектора, и при этом средний вектор кластера может сравниваться с вектором пороговых значений, который может быть определен посредством измерений, проводимых для калибровки. Таким образом, назначение свойств объекта окнам дискретизации может быть выполнено посредством пороговой обработки. Также возможно то, что кластерный анализ применяется сначала до того, как начинается абляция, приводя к первой группе кластеров, представляющих неаблированную ткань. Затем, кластерный анализ может непрерывно применяться в то время, когда выполняется операция абляции. Если кластерный анализ приводит к новым кластерам, которые не принадлежат первой группе кластеров, свойство «аблированная ткань» может назначаться этим новым кластерам.
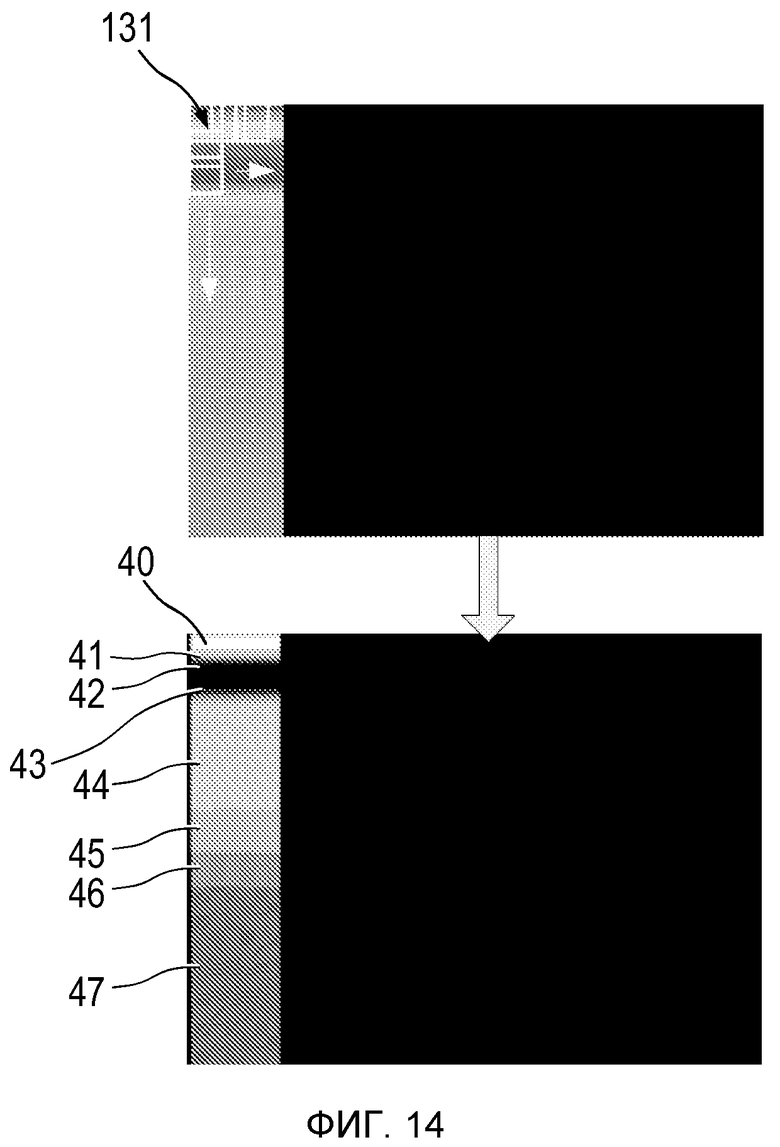
В варианте осуществления, модуль определения свойств выполнен с возможностью применять следующую технологию кластерного анализа для определения того, какая часть ткани аблирована, а какая часть ткани не аблирована. Технология кластерного анализа описывается со ссылкой на фиг. 14-18, при этом на фиг. 14-16 верхняя часть показывает изображение M-режима, а нижняя часть показывает результат технологии кластерного анализа, и при этом фиг. 17 и 18 показывают блок-схемы последовательности операций способа, иллюстрирующие несколько этапов технологии кластерного анализа.
Модуль определения рассеяния определяет значения рассеяния для нескольких окон 131 дискретизации. Окна 131 дискретизации дискретизируют все изображение M-режима и перекрываются. Перекрытие окон 131 дискретизации увеличивает разрешение конечного результата кластеризации. Окна дискретизации соответствуют определенным диапазонам глубин и определенным диапазонам времени. Окна 131 дискретизации могут иметь идентичную ширину и идентичную длину, либо ширина и длина окон дискретизации может отличаться. Кроме того, изображение M-режима может быть дискретизировано посредством различных окон дискретизации, имеющих различные размеры и/или различные формы. Предпочтительно, ширина окна охватывает по меньшей мере один цикл сердечного сокращения, при этом окна дискретизации могут совмещаться относительно сердечного сокращения. Например, каждое окно дискретизации может начинать одновременно сдвиг относительно соответствующего цикла сжатия. В варианте осуществления, размер окон дискретизации в направлении глубины составляет приблизительно 0,2 мм.
Первая технология кластерного анализа выполняется до того, как начинается абляция, при этом соответствующее изображение M-режима показывается в верхней части по фиг. 14. Эта первая технология кластерного анализа описывается далее со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 17.
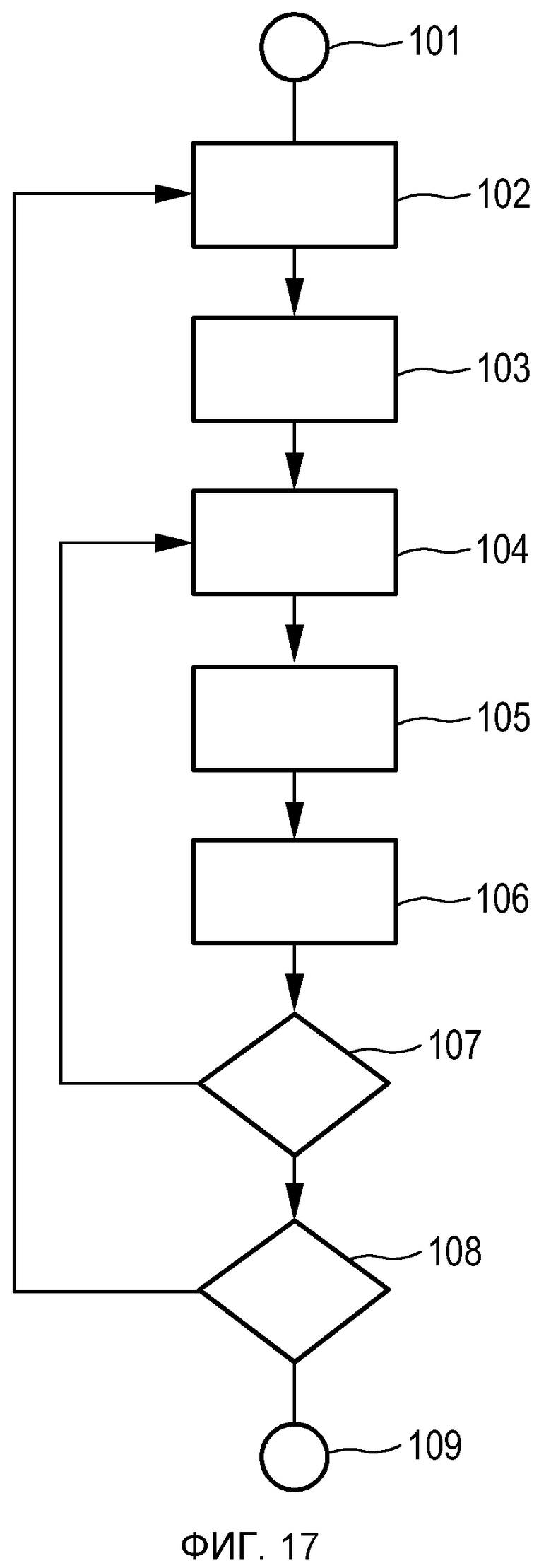
Первая технология кластерного анализа инициализируется на этапе 101 посредством обеспечения изображения M-режима, показывающего ткань до того, как начинается абляция, посредством дискретизации изображения M-режима с окнами дискретизации и посредством определения для каждого из окон дискретизации многомерного вектора признаков, содержащего значения рассеяния.
На этапе 102 выбирается окно дискретизации и, таким образом, соответствующий начальный вектор признаков. Этот выбор может быть выполнен произвольно. На этапе 103, начальный вектор признаков и, таким образом, выбранное окно дискретизации назначается первому кластеру. На этапе 104, определяется то, какие векторы признаков размещаются в области вокруг начального вектора признаков в пространстве многомерных векторов признаков, содержащем многомерные векторы признаков. Областью предпочтительно является круг, если вектор признаков представляет собой двумерный вектор, или гиперсфера, если вектор признаков имеет размерность, превышающую два. Размер области может быть определен посредством измерений, проводимых для калибровки.
На этапе 105, определенные векторы признаков, которые находятся в области вокруг начального вектора признаков, назначаются первому кластеру, а на этапе 106, векторы признаков в первом кластере усредняются для вычисления среднего вектора первого кластера. На этапе 107, определяется то, удовлетворяется или нет критерий прекращения. Критерий прекращения, например, представляет собой то, достигнуто уже или нет предварительно заданное число итераций, либо то, удовлетворен или нет критерий схождения. Критерий схождения, например, представляет собой то, что разность между начальным вектором признаков и средним вектором признаков или разность между фактически определенным средним вектором признаков и ранее определенным средним вектором признаков ниже предварительно заданного порогового значения. Если критерий прекращения не удовлетворяется, кластерный анализ снова выполняет этапы 104-107, при этом теперь вместо начального вектора признаков используется фактически определенный средний вектор признаков, т.е. на этапе 104 векторы признаков определяются в области вокруг фактически определенного среднего вектора признаков, на этапе 105 векторы признаков в области вокруг фактического среднего вектора, которые еще не назначены первому кластеру, назначаются первому кластеру, а на этапе 106 новый средний вектор признаков вычисляется посредством усреднения векторов признаков первого кластера.
Если на этапе 107 критерий прекращения удовлетворяется, первый кластер определен, и способ переходит этапу 108. На этапе 108 определяется то, назначены или нет все векторы признаков и, таким образом, все окна дискретизации кластеру. Если не все векторы признаков назначены кластеру, этапы 102-107 выполняются на основании оставшихся векторов признаков, которые не назначены кластеру, чтобы определять дополнительный кластер. Этапы 102-108, следовательно, выполняются до тех пор, пока все векторы признаков и, таким образом, окна дискретизации не назначены кластеру. После того, как все векторы признаков назначены кластеру, первая технология кластерного анализа завершается на этапе 109. Поскольку первая технология кластерного анализа применяется к изображению M-режима, которое показывает ткань до того, как начинается абляция, кластеры, которые определены посредством выполнения этапов 101-109, соответствуют неаблированной ткани.
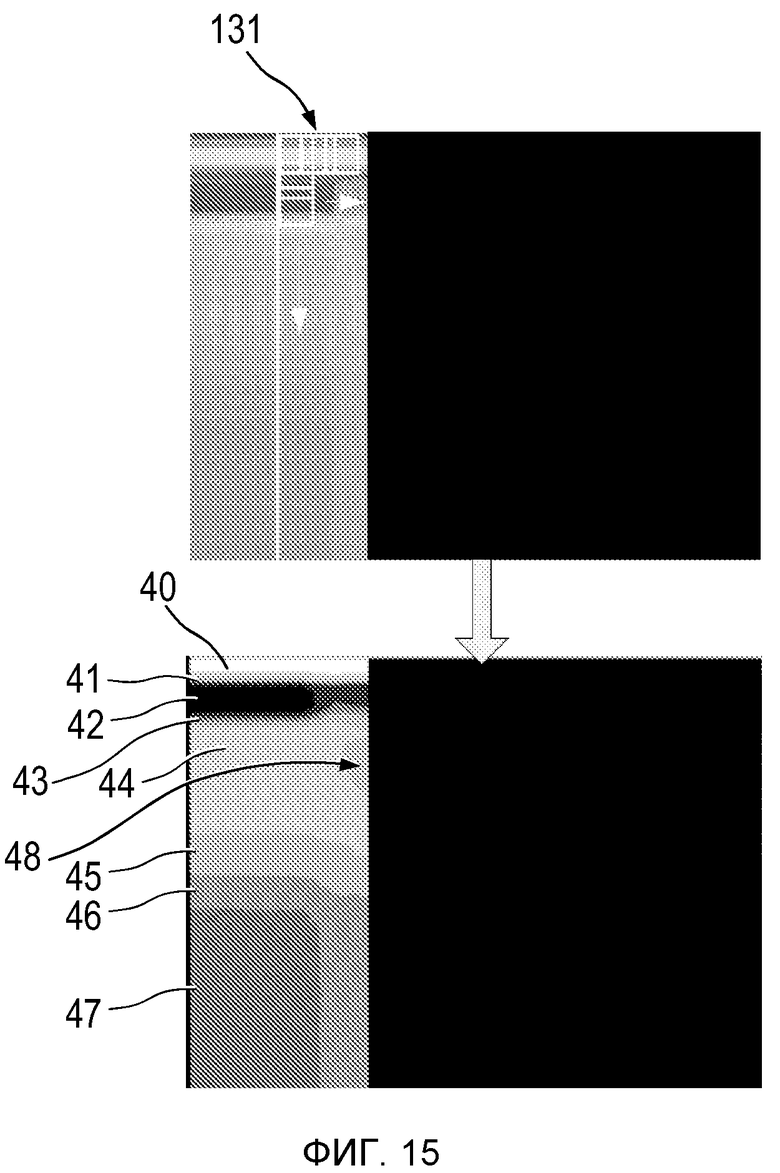
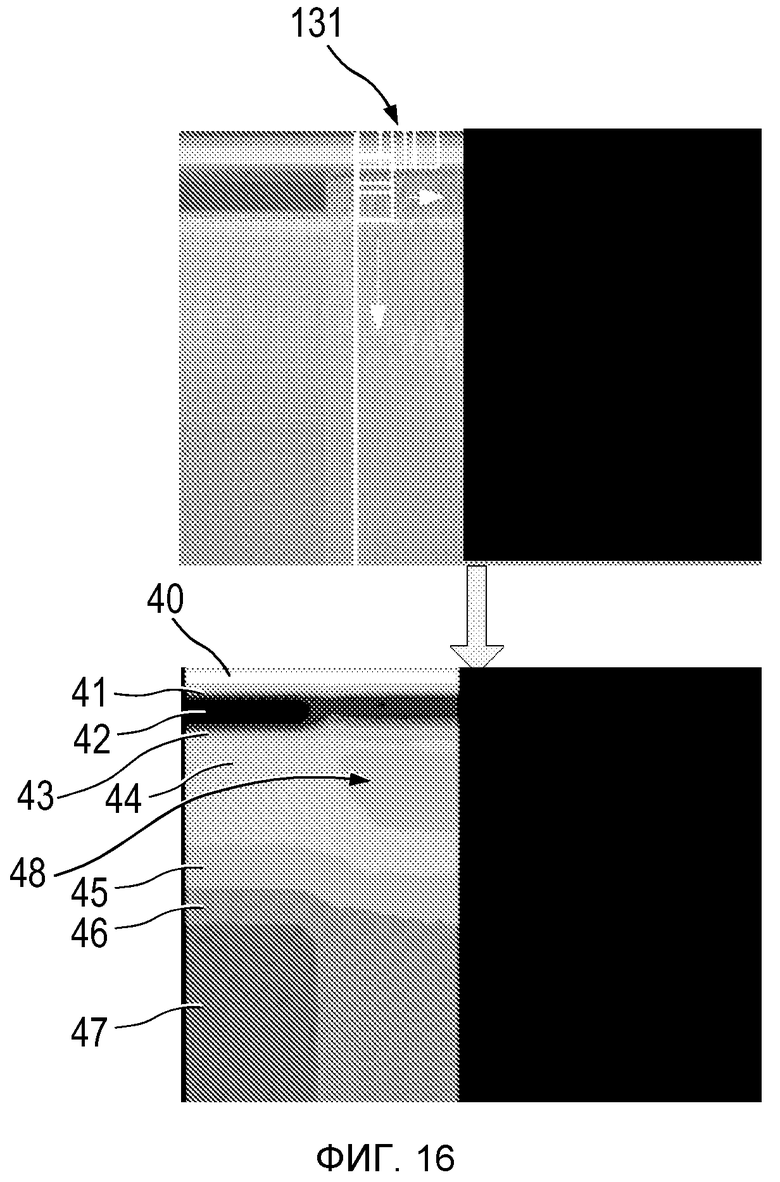
Фиг. 15 и 16 показывают изображения M-режима, которые иллюстрируют ткань не только до того, как начинается абляция, но также и после того, как абляция начата. В то время, когда выполняется абляция, ультразвуковой сигнал непрерывно формируется и дискретизируется. Таким образом, окна дискретизации непрерывно обнаруживаются, и для каждого окна дискретизации вычисляется вектор признаков, т.е. непрерывно определяются векторы признаков, при этом новые непрерывно определенные векторы признаков кластеризуются в соответствии со второй технологией кластерного анализа, которая описывается далее со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 18.
На этапе 201, показатель подобия применяется к фактически определенному вектору признаков и к каждому из средних векторов уже определенных кластеров. Показателем подобия является, например, абсолютная разность между фактически определенным вектором признаков и соответствующим средним вектором признаков, причем если эта абсолютная разность ниже предварительно заданного порогового значения, фактически определенный вектор признаков рассматривается как подобный соответствующему среднему вектору признаков. Если фактически определенный вектор признаков является подобным среднему вектору признаков определенного кластера, фактически определенный вектор признаков назначается определенному кластеру на этапе 202, при этом на этапе 203 вычисляется новый средний вектор признаков для этого определенного кластера с учетом нового назначенного фактически определенного вектора признаков.
Если, на этапе 201 определяется то, что фактически определенный вектор признаков не является подобным ни одному из средних векторов признаков существующих кластеров, способ переходит к этапу 204. На этапе 204, фактически определенный вектор признаков, который не может назначаться существующему кластеру, задает новый кластер, и фактически определенный вектор признаков задается как средний вектор признаков этого нового кластера.
Как можно примерно видеть в нижней части по фиг. 14, до того как начинается абляция, присутствуют несколько кластеров 40, …, 47 которые могут принадлежать различным структурам неаблированной ткани. В нижних частях фиг. 15 и 16 можно видеть новый кластер 48, который формируют после того, как абляция начата. Следовательно, модуль определения свойств назначает этот новый кластер 48 «аблированной ткани», а другие кластеры 40, …, 47 - «неаблированной».
Устройство 1 для абляции дополнительно содержит дисплей 10 для показа определенного свойства. В частности, дисплей 10 выполнен с возможностью показывать, какие части ткани аблированы, а какие части ткани не аблированы.
Модуль определения свойств предпочтительно также выполнен с возможностью определять глубину абляции в зависимости от определенных аблированных частей и неаблированных частей. Поскольку из изображения M-режима известны положения аблированных частей и неаблированных частей, может быть легко определена глубина абляции, т.е. глубина, до которой аблирована ткань, начиная с внешней поверхности ткани. Дисплей 10 также может быть выполнен с возможностью показывать эту глубину абляции.
Устройство 1 для абляции дополнительно содержит модуль 54 определения толщины сердечной стенки для определения толщины сердечной стенки в зависимости от A-линии изображения M-режима. A-линия задается посредством ультразвуковых интенсивностей изображения M-режима, которые представляют амплитуды ультразвукового сигнала, в фиксированное время 


Области A-линии 61, обозначаемые посредством 62 и 63, соответствуют передней и задней поверхностям сердечной стенки. Область 64 непосредственно сформирована посредством ультразвукового импульса.
A-линия 61, показанная на фиг. 19, дает возможность определения положения передней и задней поверхностей 62, 63 относительно положения ультразвукового преобразователя 18, который испускает ультразвуковой импульс и принимает эхо-сигналы. Первая измеренная амплитуда в области 64 задает положение ультразвукового модуля. После области 64 идет область, содержащая практически нулевую амплитуду, и через некоторое время амплитуда снова увеличивается в области 63, отмечая первое отражение в объекте, т.е. отмечая переднюю поверхность объекта. Область 65, содержащая небольшие амплитуды, которые соответствуют отражениям в ткани сердечной стенки, идет далее, и затем в области 62 амплитуда снова значительно увеличивается, тем самым отмечая заднюю поверхность сердечной стенки. Таким образом, A-линия 61 дает возможность определения положений передней и задней поверхностей на основании областей 62 и 63. Модуль определения толщины сердечной стенки предпочтительно выполнен с возможностью определять положение увеличивающейся амплитуды в области 63 после области, содержащей практически нулевое значение амплитуды, в качестве положения передней поверхности объекта. Затем, амплитуда существенно снижается в области 65, и положение следующего значительного увеличения амплитуды (область 62) определяется в качестве положения задней поверхности сердечной стенки. Другими словами, после прямого вызова преобразователя ультразвукового модуля в области 64 в результате возникает «период молчания». Этот период молчания затем завершается посредством отражения в области 63, которая ассоциирована с передней поверхностью. После этого отражения в области 63 возникает период 65, который помечается посредством быстрых и небольших изменений температуры в ультразвуковой интенсивности. В частности, огибающая сигнала в период 65 имеет тенденцию иметь экспоненциальное снижение интенсивности. В конце периода 65 снова наблюдается сильное отражение в области 62, которая ассоциирована с задней поверхностью. Пороговые значения могут предварительно задаваться, в частности, относительные пороговые значение могут предварительно задаваться, при этом передняя поверхность определяется, если отражение после «периода молчания» превышает соответствующее предварительно заданное пороговое значение, и при этом задняя поверхность определяется, если в конце периода 65 сигнал превышает соответствующее пороговое значение. Пороговые значения могут предварительно задаваться посредством измерений, проводимых для калибровки, со стенками, имеющими известные положения передней поверхности и задней поверхности.
В варианте осуществления, модуль определения свойств также может быть выполнен с возможностью определять степень трансмуральности сердечной стенки в зависимости от определенной глубины абляции и определенных положений передней поверхности и задней поверхности сердечной стенки.
Устройство 1 для абляции дополнительно содержит модуль 11 управления для управления абляцией объекта в зависимости от свойства объекта, которое определяется посредством модуля определения свойств. В частности, модуль 11 управления может быть выполнен с возможностью управлять абляцией ткани объекта в зависимости от определенных аблированных частей и неаблированных частей ткани объекта. Например, если определенная часть ткани объекта должна быть аблирована, модуль 11 управления может управлять абляцией ткани объекта таким образом, что RF-энергия применяется до тех пор, пока соответствующие части 1 не аблированы полностью. Для выполнения этого управления операцией абляции, аблированные части ткани и неаблированная часть ткани предпочтительно определяются в реальном времени. Модуль 11 управления также может быть выполнен с возможностью управлять абляцией сердечной стенки в зависимости от степени трансмуральности. В частности, модуль 11 управления может быть выполнен с возможностью управлять абляцией так, что сердечная стенка полностью аблируется без абляции подслойной ткани, т.е. модуль управления может быть выполнен с возможностью управлять устройством для абляции так, что достигается трансмуральность в 100 процентов.
Модули и элементы устройства 1 для абляции, которые используются для определения свойства объекта, в частности, для определения аблированных частей и неаблированных частей объекта, формируют устройство определения свойств, которое интегрировано в устройство для абляции. Тем не менее, устройство определения свойств также может быть отдельным устройством, которое не интегрировано в устройство для абляции.
Отдельное устройство определения свойств схематично и примерно показывается на фиг. 20. Элементы и модули устройства 90 определения свойств, показанной на фиг. 20, являются аналогичными соответствующим элементам и модулям, описанным выше со ссылкой на фиг. 1, и обозначаются посредством аналогичных ссылочных позиций. Для подробного описания устройства 90 определения свойств поэтому следует обратиться к вышеприведенному описанию по фиг. 1.
Фиг. 21 схематично и примерно показывает вариант осуществления наконечника 71 катетера для катетера 70 устройства 90 определения свойств. Элементы и модули наконечника 71 катетера для катетера из устройства 90 определения свойств являются аналогичными соответствующим элементам и модулям, описанным выше со ссылкой на фиг. 2, и, следовательно, обозначаются посредством аналогичных ссылочных позиций. Для подробного описания этих элементов и модулей поэтому следует обратиться к описанию, приведенному выше со ссылкой на фиг. 2. В отличие от наконечника катетера из устройства для абляции, наконечник катетера из устройства 90 определения свойств не содержит электрод для абляции.
Далее примерно описывается вариант осуществления способа определения свойств со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 22.
На этапе 301, ультразвуковой сигнал обеспечивают путем отправки ультразвукового импульса в объект 3, приема последовательности эхо-сигналов из объекта 3 и формирования ультразвукового сигнала в зависимости от принимаемой последовательности эхо-сигналов. Ультразвуковой сигнал, являющийся изображением M-режима, обеспечивает ультразвуковой преобразователь 18. На этапе 302 по меньшей мере одно значение рассеяния, указывающее на рассеяние ультразвукового импульса жидкостью объекта 3, определяется в зависимости от обеспечиваемого ультразвукового сигнала. На этапе 303 в зависимости от одного или нескольких значений рассеяния определяются свойства объекта, в частности, аблированные части объекта и неаблированные части объекта.
Далее примерно описывается вариант осуществления способа абляции для абляции объекта со ссылкой на блок-схему последовательности операций способа, показанную на фиг. 23. На этапе 301 обеспечивают ультразвуковой сигнал, на этапе 302 определяют по меньшей мере одно значение рассеяния на основании обеспечиваемого ультразвукового сигнала; и на этапе 303 определяют свойство объекта в зависимости по меньшей мере от одного значения рассеяния. Этапы 301-303 являются аналогичными этапам, описанным выше со ссылкой на фиг. 22, и выполняются в цикле, чтобы непрерывно определять то, какая часть объекта аблирована, а какая часть объекта не аблирована. Эту информацию по абляции обеспечивают в модуль 11 управления устройства 1 для абляции, при этом абляция объекта на этапе 304, в частности, применение RF-энергии через электрод 4 для абляции, управляется посредством управления источником 24 энергии в зависимости от определенной информации по абляции. Таким образом, информация по абляции непрерывно определяется и используется для управления операцией абляции.
Одним основным недостатком в известных операциях абляции катетера для аритмий сердца является отсутствие достоверной информации по качеству поражения в момент, когда оно создается. Кроме того, посредством использования известных способов очень трудно снова находить старые поражения при повторном проведении операций абляции. В настоящее время, врач основывается на своих собственных знаниях и опыте для того, чтобы определять оптимальные параметры для абляции, к примеру, мощность, температуру и длительность. Тем не менее, эти настройки варьируются в значительной степени, например, вследствие различий у одного пациента и между пациентами, например, толщины локальной сердечной стенки, локального охлаждения посредством кровотока, контакта между катетером и тканью и т.д.
В предшествующем уровне техники, две основных связанных с терапией проблемы являются следствием либо недогрева, либо перегрева участка. В случае недогрева ткань недостаточно коагулируется, чтобы формировать блокирующее аритмию поражение, требуемое врачом. Это может приводить к постоянным или рецидивирующим симптомам у пациента и необходимости последующего лечения, более длительным периодам госпитализации и большим рискам инсульта и эмболии. Другая крайность, перегрев, либо вызывает разрыв ткани на участке проведения лечебных процедур, высвобождение потенциально опасных для жизни частиц в кровоток, либо вызывает повреждение соседних органов и тканей.
Устройство для абляции в соответствии с изобретением обеспечивает улучшенное управление. Оно обеспечивает обратную связь по развитию поражения в ткани, может обеспечивать информацию о глубине поражения относительно толщины ткани на участке проведения лечебных процедур и может предотвращать травмы и смерть вследствие недогрева и перегрева при операциях абляции с помощью катетера.
Во время абляции сосудистые структуры и тем самым капиллярная перфузия, в общем, полностью уничтожаются посредством коагуляционного некроза. Напротив, капиллярная перфузия с клетками крови питает здоровую ткань, которая не аблирована, кислородом и метаболитами. Следовательно, аблированная ткань, в общем, не содержит капиллярной перфузии, либо капиллярная перфузия по меньшей мере значительно уменьшается, и неаблированная ткань содержит обычную капиллярную перфузию, которая, в общем, не уменьшается. По меньшей мере, одно значение рассеяния предпочтительно служит признаком рассеяния ультразвукового импульса посредством клеток крови, которая перфузирует ткань, и следовательно, также служит признаком информации по абляции, в частности, того, является ткань аблированной тканью или неаблированной тканью. Таким образом, модуль определения свойств может определять то, является ткань аблированной тканью или неаблированной тканью, на основании по меньшей мере одного значения рассеяния, как подробнее описано выше.
Как уже упомянуто выше, движение (красных) клеток крови способствует рассеянию ультразвука, в частности, при более высоких ультразвуковых (US) частотах (>10 МГц). Следовательно, обусловленное абляцией изменение в движении клеток крови вследствие либо изменения скорости потока, либо полного отсутствия движения вследствие уничтоженной сосудистой сети влияет на рассеяние US. Эта функция может быть использована в качестве маркера для повреждения ткани.
В варианте осуществления, модуль определения свойств выполнен с возможностью идентифицировать кровеносные сосуды. Поскольку по меньшей мере одно значение рассеяния может служить признаком рассеяния ультразвукового импульса посредством клеток крови, модуль определения свойств может быть выполнен с возможностью идентифицировать кровеносные сосуды, в частности, артерии или жилы, в зависимости по меньшей мере от одного значения рассеяния. Например, посредством измерений, проводимых для калибровки, можно определять то, какие значения рассеяния соответствуют кровеносным сосудам, и модуль определения свойств может идентифицировать кровеносный сосуд, если фактически определяется значение рассеяния, которое соответствует, как определено посредством калибровки, кровеносному сосуду. Модуль управления устройства для абляции может быть приспособлен таким образом, что он формирует оповещение на дисплее или на другом модуле вывода, таком как модуль акустического вывода, если модуль определения свойств идентифицирует кровеносный сосуд в местоположении, в котором должна начинаться или продолжаться операция абляции. Таким образом, врач может быть уведомлен, когда электрод для абляции размещается поверх или очень близко к кровеносному сосуду, и можно не допускать применения операции абляции на кровеносном сосуде. Применения операции абляции на кровеносном сосуде следует не допускать, поскольку оно может вызывать, например, ишемию.
Устройство для абляции и устройство определения свойств обеспечивают автоматический способ анализа и количественного определения изменения структуры рассеяния для перфузированных кровью и неперфузированных кровью тканей. Как упомянуто выше, эта разность структур обеспечивает важную информацию для различения здоровой сердечной ткани перед абляцией и коагулированной аблированной ткани вследствие абляции. Разность структур предпочтительно основана на статистическом анализе свойств текстуры ультразвуковых изображений M-режима в реальном времени, в частности, на статистических свойствах второго порядка, которые дают четкое различие между этими двумя состояниями. Это обеспечивает различение здоровой и коагулированной ткани, предпочтительно, только на основании статистического анализа и, следовательно, может использоваться для целей мониторинга поражений, в частности, для управления глубиной поражения, во время и/или после абляции.
По меньшей мере, одно значение рассеяния предпочтительно определяется из ультразвуковых необработанных данных, поскольку они сохраняют высокочастотную информацию, которая используется для различения структур рассеяния. Таким образом, ультразвуковой сигнал, который используется для определения по меньшей мере одного значения рассеяния, предпочтительно представляется посредством ультразвуковых необработанных данных, которые не обработаны, например, которые не отфильтрованы.
Хотя в вышеописанных вариантах осуществления значения рассеяния определяются на основании, например, гистограмм первого порядка и второго порядка, значение рассеяния также может быть определено на базе другого анализа на основании текстуры, который может включать в себя статистику высшего порядка. Например, может быть использован подход на основании фильтрации Габора, при котором определенные полосы частот могут иметь возможность захватывать существенные отличия между аблированной тканью и неаблированной тканью.
Хотя в вышеописанных вариантах осуществления ультразвуковой преобразователь интегрируется в катетер, ультразвуковой преобразователь также может интегрироваться, например, в иглу.
Снова ссылаясь на фиг. 1, модуль 52 обеспечения оросительной жидкости может быть выполнен с возможностью добавлять сосудорасширяющее средство, такое как изопротеренол, в оросительной жидкости. Когда болюс сосудорасширяющего средства применяется непосредственно перед тем, как начинается абляция, увеличивается локальная перфузия целевого местоположения. Таким образом, разность в кровяном ультразвуковом рассеянии до и после абляции может улучшаться, тем самым упрощая анализ, т.е. упрощая отличение аблированной ткани от неаблированной ткани на основании по меньшей мере одного значения рассеяния посредством модуля определения свойств.
Хотя в вышеописанном варианте осуществления устройство определения свойств интегрировано в устройство для абляции, в других вариантах осуществления устройство определения свойств также может быть интегрировано в другое устройство воздействия на объект, например, в биопсийное устройство для выполнения биопсии. Биопсийное устройство содержит биопсийную иглу, при этом ультразвуковой преобразователь может быть интегрирован в наконечник биопсийной иглы. Биопсийное устройство может быть использовано, например, в онкологии и для отличения аблированных опухолей от неаблированных опухолей. Обычно опухоль отличается плотным скоплением коагулированной ткани, окруженной гиперперфузированной тканью. Эта окружающая ткань является тканью-мишенью, из которой следует брать биопсию. Ультразвуковые импульсы могут быть рассеяны посредством окружающей гиперперфузированной ткани, и может быть определено по меньшей мере одно значение рассеяния на основании полученного в результате ультразвукового сигнала. На основании этого по меньшей мере одного значения рассеяния можно определять, какая часть опухоли является плотным скоплением коагулированной ткани, а какая часть опухоли является гиперперфузированной тканью, из которой должна быть взята биопсия.
Фиг. 24 схематично и примерно показывает вариант осуществления наконечника 80 биопсийной иглы. Биопсийная игла содержит множество ультразвуковых преобразователей 18, расположенных во внешней области наконечника 80 биопсийной иглы. Эта внешняя область окружает центральную полость 82. Центральная полость используется для введения инструмента биопсии для забора части ткани 3 и для переноса этой части наружу по отношению к человеку. Ультразвуковые преобразователи 18 обеспечивают ультразвуковые сигналы путем отправки ультразвукового импульса в ткань, приема последовательности эхо-сигналов из ткани и формирования ультразвукового сигнала в зависимости от принимаемой последовательности эхо-сигналов. Ультразвуковой сигнал передается в модуль определения рассеяния через электрические соединения 23. Модуль определения рассеяния определяет по меньшей мере одно значение рассеяния, указывающее на рассеяние ультразвукового импульса жидкостью в ткани, при этом по меньшей мере одно значение рассеяния определяется в зависимости от ультразвукового сигнала, и модуль определения свойств определяет свойство ткани в зависимости по меньшей мере от одного значения рассеяния, как описано выше со ссылкой на фиг. 1 и 2. В частности, модуль определения свойств определяет то, какая часть опухоли является плотным скоплением коагулированной ткани, которая, касательно перфузии, соответствует аблированной ткани, а какая часть опухоли является гиперперфузированной тканью, из которой должна быть взята биопсия и которая, касательно перфузии, соответствует неаблированной ткани. Биопсийное устройство предпочтительно дополнительно содержит модуль 2 обеспечения изображений, модуль 6, 7 локализации и навигационный модуль 29, описанные выше со ссылкой на фиг. 1. Между дальним концом наконечника биопсийной иглы и ультразвуковыми преобразователями 18 предусмотрен акустически прозрачный материал 81, такой как полиметилпентен, для задания акустического тракта между ультразвуковыми преобразователями 18 и за пределы биопсийной иглы.
Хотя в вышеописанном варианте осуществления положения передней и задней поверхностей сердечной стенки определяются из амплитуды A-линии, в других вариантах осуществления эти положения могут быть определены другими способами. Например, положения передней и задней поверхностей сердечной стенки могут быть определены на основании спектрального анализа A-линии по глубине.
Устройство для абляции и устройство определения свойств могут быть использованы в визуализации ткани во время лечения, например, аритмии сердца и абляции опухоли. В этих операциях требуется следовать изменениям в образовании поражения во время операции.
Другие вариации в раскрытых вариантах осуществления могут пониматься и выполняться специалистами в данной области техники при применении на практике заявленного изобретения, из изучения чертежей, раскрытия сущности и прилагаемой формулы изобретения.
В формуле изобретения слово «содержащий» не исключает другие элементы или этапы, и неопределенный артикль не исключает множество.
Определения, такие как определение значения рассеяния и свойства объекта, выполняемые посредством одного или нескольких модулей или устройств, могут быть выполнены посредством любого другого числа модулей или устройств. Например, определение значения рассеяния и определение свойства объекта могут быть выполнены посредством одного модуля или посредством любого другого числа различных модулей. Определения и/или управление устройством для абляции в соответствии со способом абляции и/или управление устройством определения свойств в соответствии со способом определения свойств могут быть реализованы как программное кодовое средство компьютерной программы и/или как специализированные аппаратные средства.
Один модуль или устройство может удовлетворять функциям нескольких элементов, изложенных в формуле изобретения. Простой факт того, что определенные меры упомянуты в различных зависимых пунктах формулы изобретения, не означает того, чтобы комбинация этих мер не может быть использована с выгодой.
Все ссылочные позиции в формуле изобретения не должны рассматриваться как ограничивающие объем.
Изобретение относится к устройству определения свойств для определения свойства объекта, которым предпочтительно является сердце. Модуль обеспечения ультразвуковых сигналов обеспечивает ультразвуковой сигнал объекта, и модуль определения рассеяния определяет по меньшей мере одно значение рассеяния, указывающее на рассеяние ультразвукового импульса посредством перфузии объекта жидкостью в зависимости от ультразвукового сигнала. Модуль определения свойств определяет свойство объекта в зависимости по меньшей мере от одного значения рассеяния. В отличие от способов определения повреждений ткани на основании образования пузырьков, свойство объекта, связанное с перфузией, такое как то, аблирована или не аблирована ткань, может быть определено относительно непосредственно на основании рассеяния ультразвукового импульса жидкостью, тем самым повышая точность определения свойства объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФИЛЬТРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ФИЛЬТРАЦИИ УЛЬТРАЗВУКОВОГО СИГНАЛА | 2011 |
|
RU2597133C2 |
| МЕДИЦИНСКОЕ УЛЬТРАЗВУКОВОЕ УСТРОЙСТВО С ОПРЕДЕЛЕНИЕМ УСИЛИЯ | 2010 |
|
RU2556975C2 |
| УСТРОЙСТВО, СПОСОБ И КОМПЬЮТЕРНАЯ ПРОГРАММА ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК СЕРДЦА | 2010 |
|
RU2539010C2 |
| ОБЪЕДИНЕНИЕ АБЛЯЦИИ И ФОРМИРОВАНИЯ УЛЬТРАЗВУКОВЫХ ИЗОБРАЖЕНИЙ | 2011 |
|
RU2576440C2 |
| АППАРАТ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ | 2011 |
|
RU2588290C2 |
| СПОСОБ И СИСТЕМА ОЦЕНКИ ОЧАГА АБЛЯЦИИ | 2019 |
|
RU2760996C1 |
| СЛЕДЯЩЕЕ УСТРОЙСТВО ДЛЯ ТОКОВОЙ ЛОКАЛИЗАЦИИ | 2009 |
|
RU2527152C2 |
| УСТРОЙСТВО ВИЗУАЛИЗАЦИИ | 2010 |
|
RU2540090C2 |
| КАТЕТЕР ДЛЯ ИРРИГАЦИОННОЙ АБЛЯЦИИ ТКАНИ С НЕЗАМКНУТЫМ КОНТУРОМ | 2010 |
|
RU2544468C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПТИЧЕСКИХ СВОЙСТВ НАНОЧАСТИЦ | 2014 |
|
RU2586938C1 |


Изобретение относится к медицинской технике, а именно к устройствам для определения свойств биологического объекта воздействия на него. Устройство для определения свойств содержит модуль обеспечения ультразвуковых сигналов, приема последовательности эхо-сигналов из объекта и формирования ультразвукового сигнала в зависимости от принимаемой последовательности эхо-сигналов, модуль определения рассеяния, выполненный с возможностью определять значения рассеяния в зависимости от ультразвукового сигнала, и модуль определения свойств для определения свойства. Устройство воздействия на объект содержит модуль воздействия и устройство определения свойств. Использование группы изобретений обеспечивает повышение точности в определении возможных повреждений ткани. 2 н. и 9 з.п. ф-лы, 24 ил.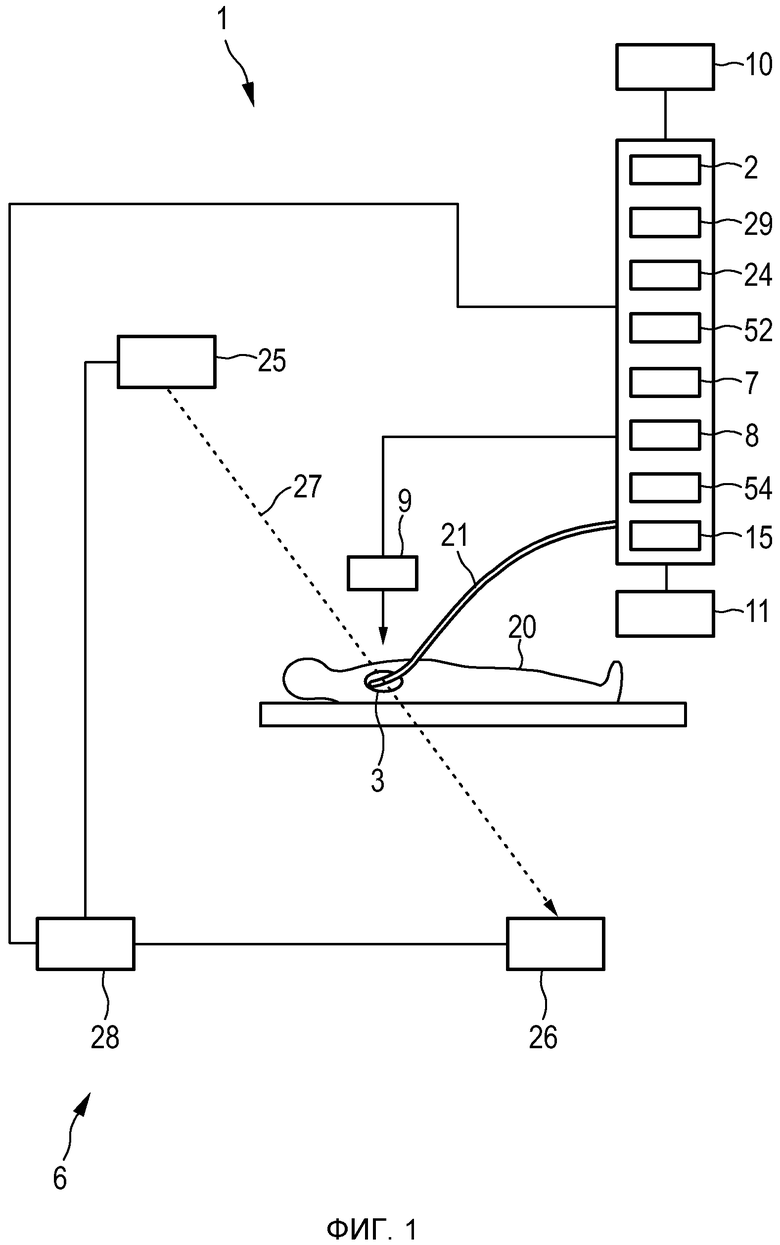
1. Устройство определения свойств для определения свойства биологического объекта, при этом устройство определения свойств содержит:
- модуль (18) обеспечения ультразвуковых сигналов для обеспечения ультразвукового сигнала, формируемого путем:
- отправки ультразвукового импульса в объект,
- приема последовательности эхо-сигналов из объекта, и
- формирования ультразвукового сигнала в зависимости от принимаемой последовательности эхо-сигналов, отличающееся тем, что устройство определения свойств дополнительно содержит:
- модуль (8) определения рассеяния для определения значений рассеяния по меньшей мере в одном из а) различных глубин в объекте и b) различных моментов времени, указывающих на рассеяние ультразвукового импульса текучей средой, перфузирующей объект, при этом модуль (8) определения рассеяния выполнен с возможностью определять значения рассеяния в зависимости от ультразвукового сигнала,
- модуль (15) определения свойств для определения свойства объекта, которое связано с перфузией объекта текучей средой, в зависимости от значений рассеяния.
2. Устройство определения свойств по п. 1, в котором биологический объект (3) содержит ткань, при этом модуль (15) определения свойств выполнен с возможностью определять, содержит ли часть ткани аблированную ткань или неаблированную ткань, на основании по меньшей мере одного значения рассеяния в качестве свойства объекта.
3. Устройство определения свойств по п. 1, в котором ультразвуковой сигнал дискретизируют посредством окон дискретизации, соответствующих по меньшей мере одному из а) различных глубин и b) различных моментов времени, при этом модуль (8) определения значений рассеяния выполнен с возможностью определять значения рассеяния для окон дискретизации, причем для соответствующего окна дискретизации по меньшей мере одно значение рассеяния определяют на основании части ультразвукового сигнала, который соответствует надлежащему окну дискретизации, и при этом модуль определения свойств выполнен с возможностью определять свойство для соответствующего окна дискретизации на основании по меньшей мере одного значения рассеяния, определенного для соответствующего окна дискретизации.
4. Устройство определения свойств по п. 3, в котором каждое из окон дискретизации соответствует нескольким ультразвуковым интенсивностям ультразвукового сигнала, при этом модуль определения рассеяния выполнен с возможностью определять по меньшей мере одно значение рассеяния для окна дискретизации в зависимости от гистограммы ультразвуковых интенсивностей в соответствующем окне дискретизации.
5. Устройство определения свойств по п. 4, в котором модуль определения рассеяния выполнен с возможностью определять по меньшей мере одно значение рассеяния на основании по меньшей мере одного из гистограммы первого порядка и гистограммы второго порядка.
6. Устройство определения свойств по п. 5, в котором модуль определения рассеяния выполнен с возможностью определять по меньшей мере одно из следующих значений в качестве по меньшей мере одного значения рассеяния: среднее значение первого порядка гистограммы первого порядка, дисперсию первого порядка гистограммы первого порядка, энтропию первого порядка гистограммы первого порядка, энтропию второго порядка гистограммы второго порядка, энергию второго порядка гистограммы второго порядка, однородность второго порядка гистограммы второго порядка, контрастность второго порядка гистограммы второго порядка, тенденцию кластеризации второго порядка гистограммы второго порядка, форму второго порядка гистограммы второго порядка, корреляцию второго порядка гистограммы второго порядка и корреляционную производную второго порядка гистограммы второго порядка.
7. Устройство определения свойств по п. 3, в котором каждое из окон дискретизации соответствует нескольким ультразвуковым интенсивностям ультразвукового сигнала, и при этом модуль определения рассеяния выполнен с возможностью определять по меньшей мере одно значение рассеяния для окна дискретизации в зависимости от суммирования ультразвуковых интенсивностей в соответствующем окне дискретизации.
8. Устройство определения свойств по п. 3, в котором модуль определения свойств выполнен с возможностью применять кластерный анализ к окнам дискретизации, при этом окна дискретизации кластеризуют в зависимости от по меньшей мере одного значения рассеяния, определенного для соответствующего окна дискретизации, и назначать свойства кластерам окон дискретизации.
9. Устройство определения свойств по п. 1, в котором модуль (18) обеспечения ультразвуковых сигналов выполнен с возможностью обеспечения ультразвукового сигнала, формируемого путем использования ультразвуковых волн с частотой, превышающей 10 МГц.
10. Устройство определения свойств по п. 1, в котором модуль (18) обеспечения ультразвуковых сигналов является ультразвуковым преобразователем, интегрированным в катетер или иглу.
11. Устройство воздействия на объект для воздействия на биологический объект, причем устройство воздействия на объект содержит модуль (4, 23, 24) воздействия на объект для воздействия на объект, отличающееся тем, что устройство воздействия на объект дополнительно содержит устройство определения свойств по п. 1.
| US 2005283074 A1, 22.12.2005WO 2006064495 A1, 22.06.2006Осипов Л.В | |||
| Ультразвуковые диагностические приборы, ВИДАР Москва 1999 |

