ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к фильтрующему устройству, способу фильтрации и компьютерной программе фильтрации для фильтрации ультразвукового сигнала. Изобретение также относится к ультразвуковому считывающему устройству, способу ультразвукового считывания и компьютерной программе ультразвукового считывания для считывания объекта.
УРОВЕНЬ ТЕХНИКИ
В патенте США 5,409,000 описывается абляционный катетер с ультразвуковым преобразователем и абляционным электродом. Ультразвуковые волны вводятся в сердечную ткань, и ультразвуковые эхо-сигналы, которые возвращаются от сердечной ткани, принимаются ультразвуковым преобразователем и визуализируются на экране. Врач, выполняющий процедуру абляции, может наблюдать результирующее ультразвуковое изображение на экране, чтобы выполнять абляционную процедуру в зависимости от этого ультразвукового изображения. Абляционная процедура выполняется путем подачи радиочастотного (РЧ) тока на абляционный электрод, расположенный на наконечнике абляционного катетера.
Недостатком РЧ абляции в сочетании с формированием ультразвукового изображения внутри одного и того же катетера является емкостная и/или кондуктивная связь РЧ сигнала с ультразвуковым сигналом, генерируемым ультразвуковым преобразователем и используемым для формирования ультразвукового изображения. Это снижает качество ультразвукового сигнала и тем самым ультразвукового изображения, используемого для отслеживания абляционной процедуры.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является обеспечение фильтрующего устройства, способа фильтрации и компьютерной программы фильтрации для фильтрации ультразвукового сигнала, в которых влияние электрического модуля, такого как РЧ абляционный электрод, может быть уменьшено. Дополнительной задачей настоящего изобретения является обеспечение ультразвукового считывающего устройства для считывания объекта, который содержит фильтрующее устройство, и соответствующего способа ультразвукового считывания и компьютерной программы ультразвукового считывания для считывания объекта.
В первом аспекте настоящего изобретения представлено фильтрующее устройство для фильтрации ультразвукового сигнала, причем ультразвуковой сигнал подвергается влиянию электрического модуля и содержит первую часть, содержащую информацию об объекте, от которого был принят ультразвуковой сигнал, и вторую часть, не содержащую информацию об объекте, при этом фильтрующее устройство содержит:
- модуль определения корректирующего сигнала для определения корректирующего сигнала, указывающего влияние электрического модуля на ультразвуковой сигнал, из второй части ультразвукового сигнала;
- корректирующий модуль для коррекции первой части ультразвукового сигнала на основе определенного корректирующего сигнала, чтобы отфильтровать влияние электрического модуля из ультразвукового сигнала.
Поскольку модуль определения корректирующего сигнала определяет корректирующий сигнал, указывающий влияние электрического модуля, которым является, например, РЧ абляционный электрод, на ультразвуковой сигнал, исходя из второй части, которая не содержит информацию об объекте, этот корректирующий сигнал обусловливается, например, нежелательными эффектами, такими как емкостная и/или кондуктивная связь электрического сигнала от электрического модуля с ультразвуковым сигналом. Первая часть ультразвукового сигнала содержит как информацию об объекте, так и информацию о нежелательных эффектах, таких как емкостная и/или кондуктивная связь. При коррекции первой части ультразвукового сигнала на основе определенного корректирующего сигнала, чтобы отфильтровать влияние электрического модуля из ультразвукового сигнала, желаемая информация об объекте становится более явной и легче извлекаемой из первой части ультразвукового сигнала. Поэтому, качество ультразвукового сигнала повышается.
Предпочтительно, электрическим модулем является электрод для подачи электрической энергии, в частности, РЧ энергии на объект, при этом влияние на ультразвуковой сигнал обусловливается емкостной и/или кондуктивной связью. В предпочтительном варианте осуществления электрическим модулем является РЧ абляционный электрод. Объектом преимущественно является сердце человека или животного, в частности, стенка сердца, и информация об объекте, которая содержится в ультразвуковом сигнале, преимущественно является информацией о сердечной ткани.
Ультразвуковой сигнал предпочтительно является сигналом А-линии, при этом первая часть А-линии содержит информацию об объекте, а вторая часть А-линии не содержит информацию об объекте.
Предпочтительно, чтобы корректирующий модуль был выполнен с возможностью вычитания определенного корректирующего сигнала из первой части ультразвукового сигнала для коррекции первой части ультразвукового сигнала.
Предпочтительно также, чтобы фильтрующее устройство содержало модуль обеспечения основной частоты для обеспечения основной частоты воздействия, оказываемого электрическим модулем, при этом модуль определения корректирующего сигнала выполняется с возможностью определения подчасти второй части ультразвукового сигнала, которая соответствует по меньшей мере одному циклу воздействия, оказываемого электрическим модулем, в зависимости от обеспеченной основной частоты, и определения корректирующего сигнала в зависимости от определенной подчасти второй части ультразвукового сигнала, и при этом корректирующий модуль выполняется с возможностью вычитания корректирующего сигнала из первой части ультразвукового сигнала для коррекции первой части. Такая коррекция первой части ультразвукового сигнала дополнительно повышает качество коррекции первой части. Например, последовательность определенных подчастей второй части ультразвукового сигнала может быть определена как корректирующий сигнал.
В предпочтительном варианте осуществления модуль обеспечения основной частоты выполнен с возможностью определения основной частоты посредством кросс-корреляции двух последовательных подчастей второй части ультразвукового сигнала. В частности, модуль обеспечения основной частоты предпочтительно выполнен с возможностью аппроксимации результата кросс-корреляции параболической функцией и определения основной частоты в зависимости от максимума параболической функции аппроксимации. Это позволяет определить основную частоту для текущего ультразвукового сигнала, в частности, для текущей А-линии, относительно простым образом. В другом варианте осуществления модуль обеспечения основной частоты может быть выполнен с возможностью приема основной частоты от управляющего модуля для управления электрическим модулем и для подачи принятой основной частоты в модуль определения корректирующего сигнала.
В предпочтительном варианте осуществления модуль определения корректирующего сигнала выполнен с возможностью повышающей дискретизации подчасти второй части. Предпочтительно, модуль определения корректирующего сигнала выполняется с возможностью повышающей дискретизации подчасти второй части с коэффициентом 2 (в два раза). Кроме того, предпочтительно, чтобы модуль определения корректирующего сигнала был выполнен с возможностью применения фильтра с бесконечной импульсной характеристикой (БИХ-фильтра) к дискретизованной с повышением подчасти второй части. В частности, модуль определения корректирующего сигнала выполняется с возможностью применения двунаправленного взаимного БИХ-фильтра к дискретизованной с повышением подчасти второй части.
Предпочтительно, чтобы модуль определения корректирующего сигнала был выполнен с возможностью многократного выполнения следующих этапов: а) повышающей дискретизации подчасти второй части с коэффициентом 2, и б) применение БИХ-фильтра к дискретизованной с повышением подчасти второй части. Повышающая дискретизация и применение БИХ-фильтра предпочтительно выполняется четыре раза, но могут также выполняться и более четырех раз. Повышающая дискретизация подчасти второй части и применение, например, двунаправленного взаимного БИХ-фильтра позволяет генерировать дискретизованную с повышением подчасть второй части таким образом, чтобы не возникало искажений информации и не оказывалось воздействия на подчасть второй части. Предпочтительное использование коэффициента 2 на каждом этапе повышающей дискретизации позволяет легко реализовать это на цифровых сигнальных процессорах, что может быть полезным при интеграции вычислений в микросхему.
Кроме того, предпочтительно, чтобы зависящее от времени усиление было применено к ультразвуковому сигналу, при этом модуль определения корректирующего сигнала выполняется с возможностью применения зависящего от времени усиления также и к корректирующему сигналу. Зависящее от времени усиление (TGC) позволяет компенсировать потери в интенсивности ультразвуковых импульсов из-за ослабления внутри объекта. Такая компенсация улучшает качество ультразвукового сигнала и, следовательно, результирующего отфильтрованного ультразвукового сигнала, который может быть использован для отслеживания абляционной процедуры, в частности, для определения глубины абляции внутри подвергаемого абляции объекта.
В другом аспекте настоящего изобретения представлено ультразвуковое считывающее устройство для считывания объекта, причем ультразвуковое считывающее устройство содержит:
- катетер, включающий в себя ультразвуковой модуль для генерации звукового сигнала, зависящего от ультразвуковых волн, принятых от объекта, и дополнительный модуль, являющийся электрическим модулем, при этом ультразвуковой модуль и электрический модуль выполнены с возможностью одновременной работы, причем генерируемый ультразвуковой сигнал подвергается воздействию электрического модуля и включает в себя первую часть, содержащую информацию об объекте, от которого был принят ультразвуковой сигнал, и вторую часть, не содержащую информацию об объекте;
- фильтрующее устройство по пункту 1 формулы изобретения, в котором модуль определения корректирующего сигнала выполнен с возможностью определения корректирующего сигнала, указывающего воздействие электрического модуля на генерируемый ультразвуковой сигнал, из второй части ультразвукового сигнала, и в котором корректирующий модуль выполнен с возможностью коррекции первой части ультразвукового сигнала на основе определенного корректирующего сигнала, чтобы отфильтровать влияние электрического модуля из первой части ультразвукового сигнала.
В другом аспекте настоящего изобретения представлен способ фильтрации ультразвукового сигнала, причем ультразвуковой сигнал подвергается воздействию электрического модуля и содержит первую часть, содержащую информацию об объекте, от которого принимается ультразвуковой сигнал, и вторую часть, не содержащую информацию об объекте, причем способ фильтрации содержит:
- определение корректирующего сигнала, указывающего влияние электрического модуля на ультразвуковой сигнал, из второй части ультразвукового сигнала, посредством модуля определения корректирующего сигнала;
- коррекцию, корректирующим модулем, первой части ультразвукового сигнала на основе определенного корректирующего сигнала, чтобы отфильтровать влияние электрического модуля из ультразвукового сигнала.
В другом аспекте настоящего изобретения представлен способ ультразвукового считывания для считывания объекта, причем способ ультразвукового считывания содержит:
- генерацию, ультразвуковым модулем, ультразвукового сигнала в зависимости от ультразвуковых волн, принятых от объекта, причем ультразвуковой модуль и дополнительный модуль, являющийся электрическим модулем, включены в состав катетера, причем ультразвуковой модуль и электрический модуль работают совместно и при этом генерируемый ультразвуковой сигнал подвергается воздействию электрического модуля и включает в себя первую часть, содержащую информацию об объекте, от которого был принят ультразвуковой сигнал, и вторую часть, не содержащую информацию об объекте;
- этапы фильтрации способа фильтрации по пункту 12 формулы изобретения, на которых модуль определения корректирующего сигнала определяет корректирующий сигнал, указывающий влияние электрического модуля на генерируемый ультразвуковой сигнал, из второй части ультразвукового сигнала, и на которых корректирующий модуль корректирует первую часть ультразвукового сигнала, чтобы отфильтровать влияние электрического модуля из первой части ультразвукового сигнала.
В другом аспекте настоящего изобретения представлена компьютерная программа фильтрации для фильтрации ультразвукового сигнала, причем компьютерная программа фильтрации содержит средства программного кода, побуждающие фильтрующее устройство по п. 1 формулы изобретения, выполнять этапы способа фильтрации по пункту 12, когда компьютерная программа фильтрации запущена на компьютере, управляющем фильтрующим устройством.
В другом аспекте настоящего изобретения представлена компьютерная программа ультразвукового считывания для считывания объекта, причем компьютерная программа ультразвукового считывания содержит средства программного кода, побуждающие ультразвуковое считывающее устройство по пункту 10 формулы изобретения, выполнять этапы способа ультразвукового считывания по пункту 13, когда компьютерная программа ультразвукового считывания запущена на компьютере, управляющем ультразвуковым считывающим устройством.
Должно быть понятно, что фильтрующее устройство по пункту 1 формулы изобретения, ультразвуковое считывающее устройство по пункту 12, способ ультразвукового считывания по пункту 13, компьютерная программа фильтрации по пункту 14 и компьютерная программа ультразвукового считывания по пункту 15 имеют подобные и/или идентичные предпочтительные варианты осуществления, которые определены в зависимых пунктах формулы изобретения.
Должно быть понятно, что предпочтительный вариант осуществления изобретения может также представлять собой любое сочетание зависимых пунктов формулы изобретения с соответствующим независимым пунктом формулы изобретения.
Эти и другие аспекты изобретения будут очевидны и пояснены со ссылками на описанные ниже варианты осуществления изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
НА ПРИЛАГАЕМЫХ ЧЕРТЕЖАХ:
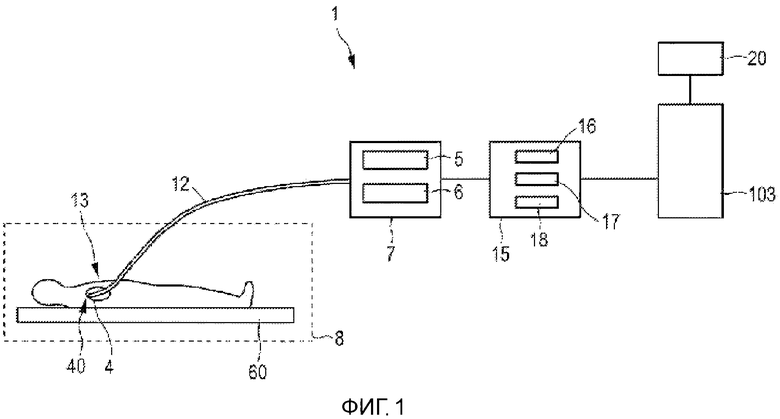
фиг. 1 - схематичное примерное представление варианта осуществления ультразвукового считывающего устройства для считывания объекта;
фиг. 2 - схематичное примерное представление наконечника катетера ультразвукового считывающего устройства;
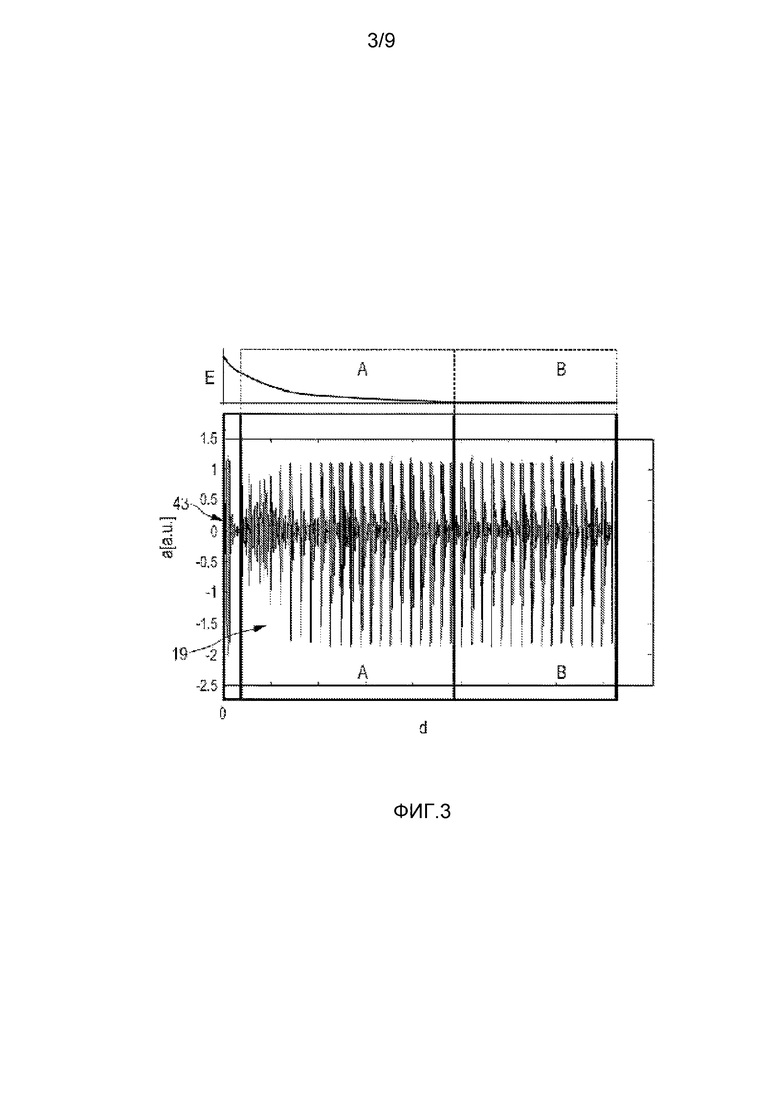
фиг. 3 - схематичное примерное представление зависимости ультразвуковой энергии от глубины ткани и соответствующего ультразвукового сигнала;
фиг. 4 - схематичное примерное представление нефильтрованной А-линии;
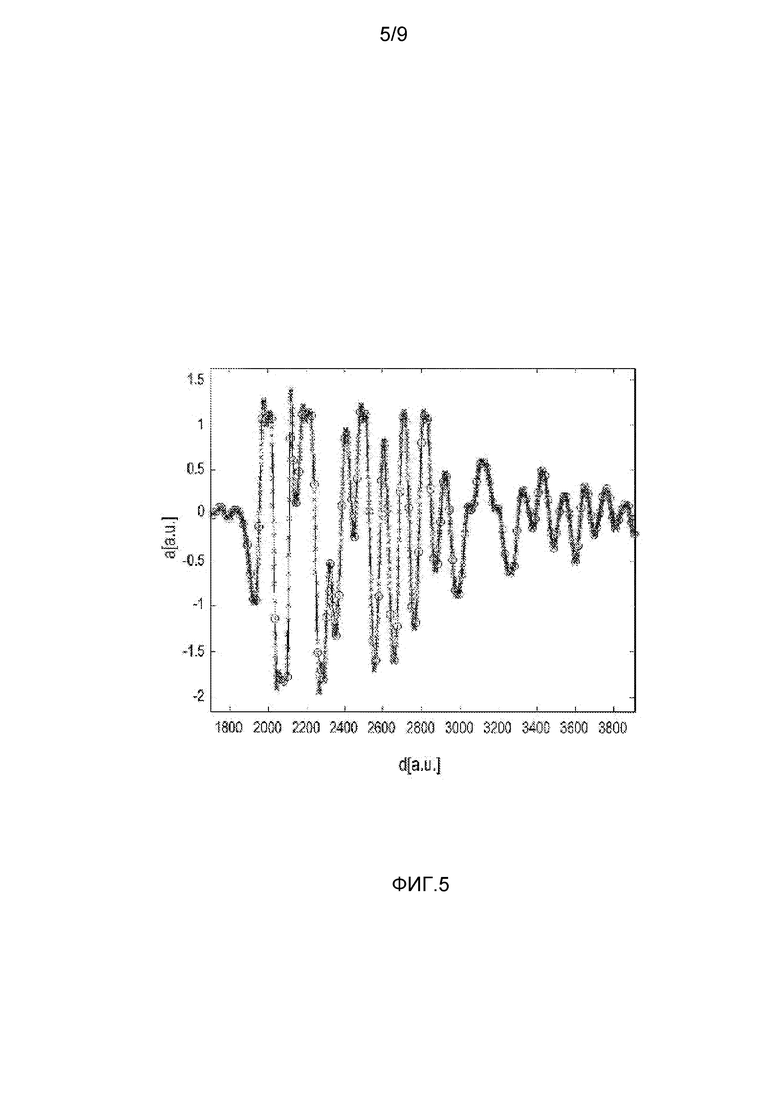
фиг. 5 - иллюстрация влияния повышающей дискретизации и фильтрации;
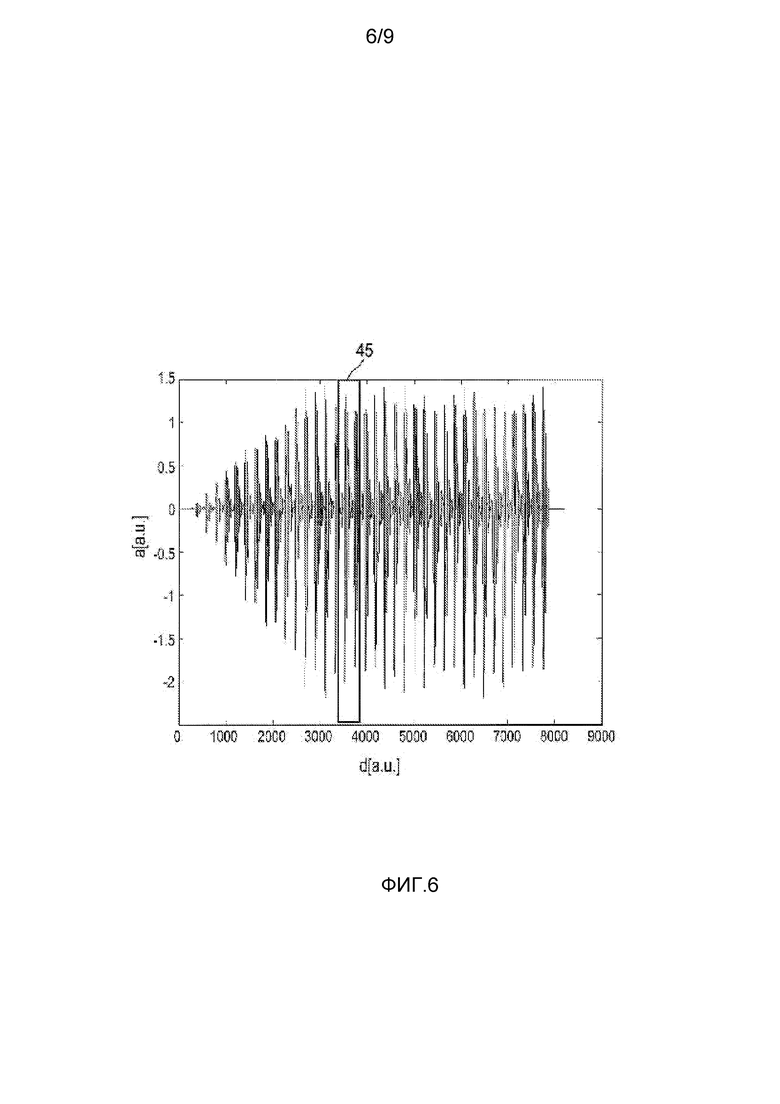
фиг. 6 - схематичное примерное представление корректирующего сигнала;
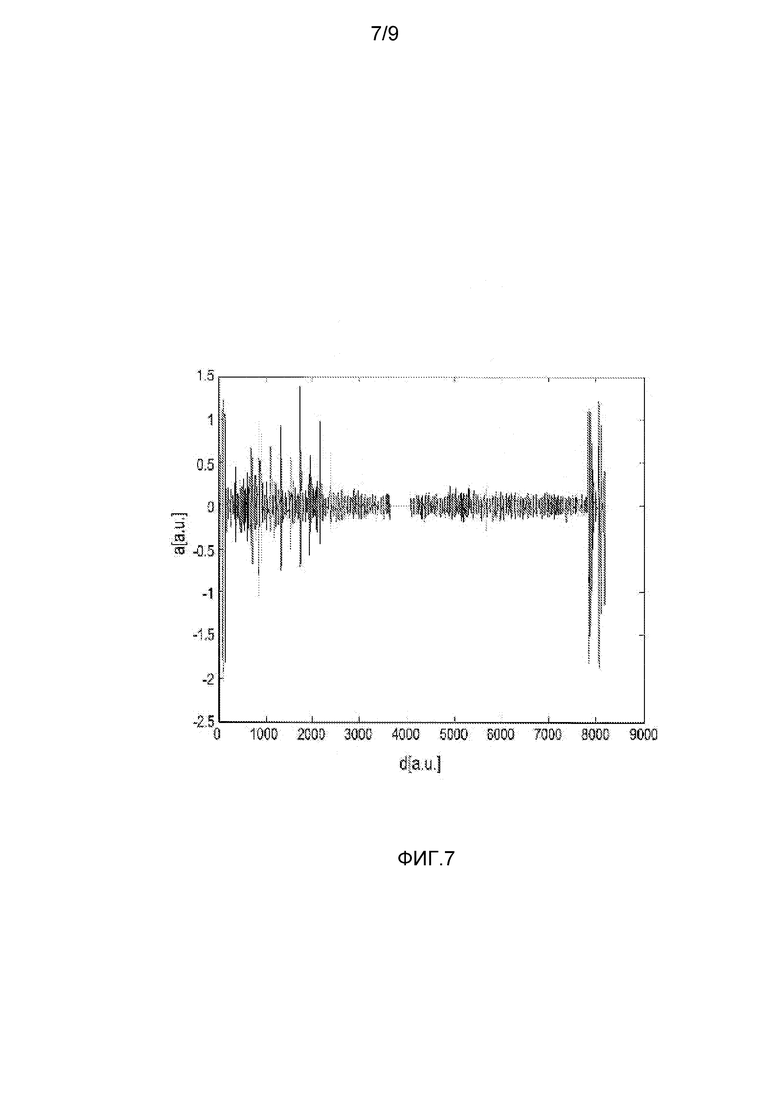
фиг. 7 - схематичное примерное представление скорректированной А-линии;
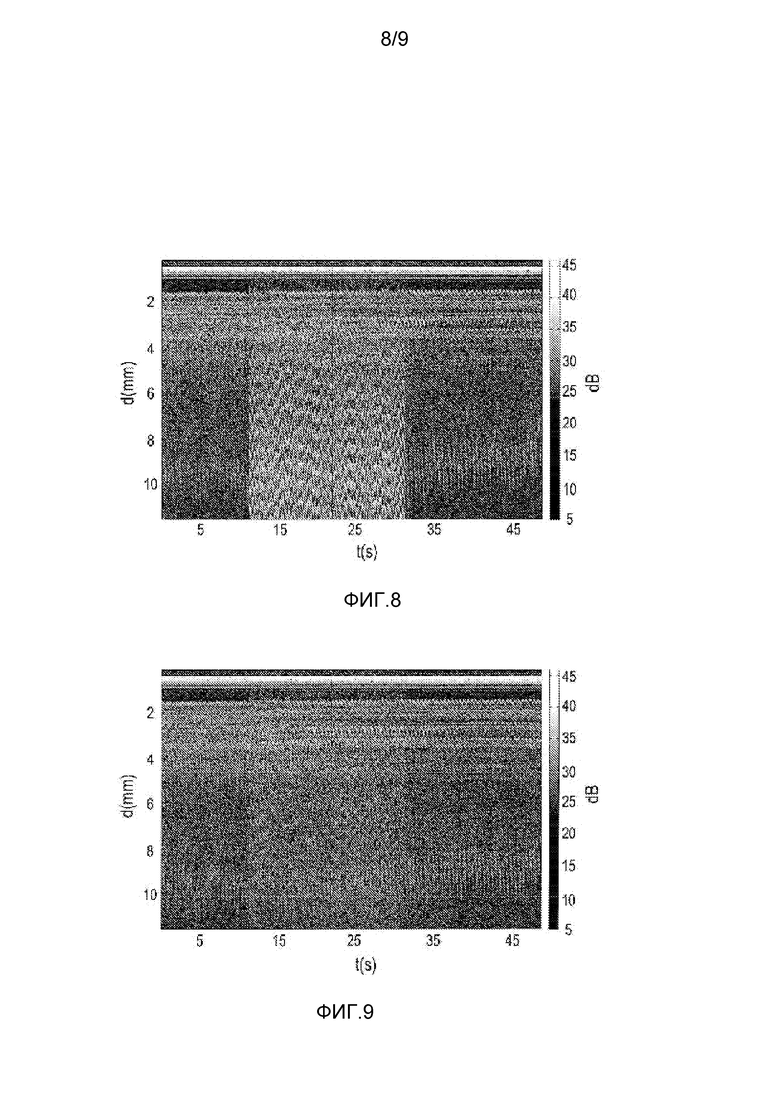
фиг. 8 - ультразвуковое изображение в М-режиме, содержащее нескорректированные А-линии;
фиг. 9 - ультразвуковое М-изображение, содержащее скорректированные А-линии;
фиг. 10 - блок-схема примерной последовательности операций, представляющая вариант осуществления способа фильтрации для фильтрации ультразвукового сигнала;
фиг. 11 - блок-схема примерной последовательности операций, представляющая вариант осуществления способа ультразвукового считывания для считывания объекта.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
На фиг. 1 схематично показано примерное ультразвуковое считывающее устройство 1 для считывания объекта 4. В этом варианте осуществления объект 4 является сердцем человека 13, расположенного на столе 60. В частности, объектом является сердечная ткань стенки сердца 4. Ультразвуковое считывающее устройство 1 содержит катетер 12 с наконечником 40 катетера, который схематически и примерно показан более подробно на фиг. 2.
Наконечник 40 катетера содержит ультразвуковой модуль 32 для генерации ультразвукового сигнала, зависящего от ультразвуковых волн, принятых от объекта 4. Наконечник 40 катетера также содержит дополнительный модуль 31, являющийся электрическим модулем. Электрический модуль 31 выполнен с возможностью подачи электрической энергии на сердечную ткань.
Ультразвуковой модуль 32 управляется ультразвуковым модулем 5 управления, причем ультразвуковой модуль 32 и ультразвуковой модуль 5 управления выполнены с возможностью посылки ультразвуковых импульсов в сердечную ткань, чтобы принимать серию динамических эхо-сигналов после отражения ультразвуковых импульсов сердечной тканью, и генерировать ультразвуковой сигнал, зависящий от принятой серии динамических эхо-сигналов. Ультразвуковой модуль 32 подсоединяется к ультразвуковому устройству 5 управления через электрическое соединение 23.
Подающий электрическую энергию модуль 31 является абляционным электродом для приложения РЧ энергии к сердечной ткани, причем абляционный электрод 31 подсоединен к вспомогательному устройству 6 управления через электрическое соединение 41, являющееся, например, кабелем для управления абляционным электродом 31. Абляционный электрод 31 является колпачковым электродом, расположенным на наконечнике 40 катетера 12 и содержит переднее центральное отверстие 42, позволяющее ультразвуковому элементу 32 осуществлять считывание сердечной ткани через отверстие 42.
Вспомогательный модуль 6 управления и ультразвуковой модуль 5 управления интегрированы в устройство 7 управления. В других вариантах осуществления эти модули управления могут быть отдельными модулями управления. Кроме того, вспомогательный модуль 6 управления предпочтительно выполняется дополнительно с возможностью управления наведением наконечника 40 и/или промыванием. В этом случае катетер дополнительно содержит наводящий модуль и/или промывающий модуль, соответственно, которые не показаны на фиг. 1 и фиг. 2. Разные функции управления могут выполняться любым числом модулей управления, например, одним модулем управления или же двумя или более чем двумя модулями управления.
Модуль 7 управления выполнен с возможностью управления ультразвуковым модулем 32 и электрическим модулем 31 одновременно, при этом генерируемый ультразвуковой сигнал испытывает воздействие, оказываемое электрическим модулем 31, то есть в этом варианте осуществления, оказываемое прилагаемой РЧ энергией. Генерируемый ультразвуковой сигнал 19 схематически и примерно показан на фиг. 3.
В верхней части фиг. 3 схематично и в качестве примера показан график зависимости ультразвуковой энергии Е от глубины d ткани. В нижней части фиг. 3 показан генерируемый ультразвуковой сигнал 19. В частности, ультразвуковой сигнал 19, показанный в нижней части фиг. 3, является А-линией, в которой амплитуда показана зависящей от глубины d ткани. Ультразвуковая энергия Е уменьшается с увеличением глубины ткани вследствие поглощения и рассеяния ее сердечной тканью. Первая часть А ультразвукового сигнала 19 соответствует ультразвуковой энергии Е, которая больше 0. Поэтому, первая часть А содержит информацию о сердечной ткани, от которой был принят ультразвуковой сигнал 19. Вторая часть В ультразвукового сигнала 19 соответствует ультразвуковой энергии Е, по существу равной 0. Поэтому вторая часть В ультразвукового сигнала 19 не содержит информации об объекте. В этом примере первая часть А содержит информацию о ткани, которая затенена радиочастотными (РЧ) помехами, а вторая часть В не содержит информации о ткани вследствие поглощения и рассеяния ультразвуковой энергии, и во второй части В видимы только РЧ помехи. К обеим частям ультразвукового сигнала было применено зависящее от времени усиление (TGC). Первая часть 43 ультразвукового сигнала 19 обусловливается прямым вызовом преобразователя.
Ультразвуковое считывающее устройство 1 дополнительно содержит фильтрующее устройство 15 для фильтрации генерируемого ультразвукового сигнала 19. Фильтрующее устройство 15 содержит модуль 16 обеспечения основной частоты для обеспечения основной частоты (частоты основной гармоники) воздействия, оказываемого РЧ абляционным электродом 31. В этом варианте осуществления модуль 16 обеспечения основной частоты выполнен с возможностью определения основной частоты посредством кросс-корреляции двух последовательных подчастей второй части В ультразвукового сигнала 19. Предпочтительно, модуль 16 обеспечения основной частоты выполнен с возможностью аппроксимации результата кросс-корреляции параболической функцией и определения основной частоты в зависимости от максимума параболической функции аппроксимации. Это будет более подробно описано ниже.
Полагается, что ультразвуковой сигнал содержит несколько выборок Sk, при этом первая подчасть Х может быть определена следующим уравнением:
X=[Si…j] (1)
где i означает первую выборку из второй части B ультразвукового сигнала, которая в этом примере может быть равна 3000 (i=3000), и где
j=i+N (2)
Переменная N выбирается так, чтобы она содержала по меньшей мере один полный РЧ цикл, который определяется вспомогательным модулем 6 управления, в частности, РЧ генератором вспомогательного модуля 5 управления, и в этом варианте осуществления составляет 460 кГц±20 кГц. Кроме того, в этом варианте осуществления ультразвуковой сигнал принимается на частоте 200 МГц. Таким образом, N=454 (200 МГц разделенные 440 кГц) выборки составляют один РЧ цикл. Поэтому, переменные могут быть определены как i=3000 и j=3454. Конечно, если в другом примере РЧ, определяемая РЧ генератором, будет другой, число выборок, составляющих полный РЧ цикл, должно быть соответственно изменено.
Вторая последующая подчасть второй части В ультразвукового сигнала может быть определена следующим уравнением:
Y=[Sk…l], (3)
где k=j+l и (4)
l=k+N (5)
Следующие друг за другом подчасти Х и Y подвергаются кросс-корреляции, аппроксимирующее параболическое уравнение подбирается к результату кросс-корреляции, и максимум параболического уравнения аппроксимации определяет основную частоту.
Другими словами, для каждой А-линии может быть извлечена основная РЧ частота посредством кросс-корреляции двух последовательных частей X=[St-2W-l…t-W-l] и Y=[St-W…t], при этом размер W окна оптимизируется, чтобы содержать по меньшей мере один полный период РЧ помех. Предварительное знание частоты и РЧ полосы частот, которое может быть получено из спецификации РЧ генератора, может повысить скорость вычисления кросс-корреляции, поскольку может быть определен адекватный размер окна, как описано выше. Переменная t предпочтительно выбирается так, что t-2W определяет выборку, представляющую только РЧ помехи, и не содержащую отражений от ткани.
В другом варианте осуществления подчасти, определенные уравнениями (1) и (3), могут быть повышающим образом дискретизированы, и дискретизированные с повышением подчасти могут быть подвергнуты кросс-корреляции. В этом случае основная РЧ частота предпочтительно определяется непосредственно из результата кросс-корреляции, без выполнения параболической аппроксимации.
Фильтрующее устройство 15 дополнительно содержит модуль 17 определения корректирующего сигнала для определения корректирующего сигнала, указывающего влияние электрического модуля 31 на ультразвуковой сигнал 19, исходя из второй части В ультразвукового сигнала 19. В частности, модуль 17 определения корректирующего сигнала выполнен с возможностью определения подчасти второй части ультразвукового сигнала, которая соответствует по меньшей мере одному циклу влияния, оказываемого электрическим модулем 31, в зависимости от обеспеченной основной частоты, и определения последовательности определенных подчастей второй части ультразвукового сигнала в качестве корректирующего сигнала. Подчасть второй части может рассматриваться как шаблонная РЧ структура из А-линии. Эта шаблонная РЧ структура выбирается таким образом, чтобы она обязательно находилась в зоне А-линии, в которой присутствуют только РЧ помехи и нет отражений от ткани. Например, при центральной частоте ультразвука в 20 МГц шаблонная РЧ структура может быть выбрана на относительно большой глубине ткани, превышающей, например, 15 мм.
Модуль 16 определения корректирующего сигнала предпочтительно выполняется с дополнительной возможностью повышающей дискретизации шаблонной РЧ структуры с коэффициентом 2, и применения двунаправленного взаимного БИХ-фильтра, который является интерполяционным фильтром, к дискретизированной с повышением шаблонной РЧ структуре. Такие повышающая дискретизация и фильтрация двунаправленным взаимным БИХ-фильтром предпочтительно выполняются несколько раз, в частности, пять раз. Повышающая дискретизация предпочтительно выполняется путем вставления 0 между каждой парой выборок шаблонной РЧ структуры, то есть шаблонной РЧ структуры. Двунаправленная взаимная БИХ-фильтрация, также известная как рекурсивная фильтрация в половинной полосе частот или рекурсивная фильтрация в М-полосе частот, описана, например, в работе “Эффективность многоскоростной и комплексной цифровой обработки сигналов”, A.W.M. van den Enden, ISBN 90-6674-650-5, глава 7.1, которая включена сюда посредством ссылки.
Двунаправленный взаимный БИХ-фильтр выполнен таким образом, что не наблюдается искажение информации и не оказывается влияние на шаблонную РЧ структуру. Повышающая дискретизация с коэффициентом 2 на одном этапе повышающей дискретизации, после которого выполняется фильтрация, является предпочтительной, потому что ее легче реализовать на цифровых сигнальных процессорах (ЦСП), что может быть очень полезным при интеграции в микросхему. В другом варианте осуществления повышающая дискретизация может также выполняться с другим коэффициентом умножения и/или может использоваться другой интерполяционный фильтр.
В описанном выше примере с дискретизацией на частоте 200 МГц полный РЧ цикл имеет 454 выборок, если полагается, что РЧ частота равна 460 кГц+/-20 кГц. Однако РЧ частота и ее гармоники могут изменяться во время абляции. Такое изменение не обязательно будет представлено целым числом выборок, то есть, например, РЧ частота может изменяться от 460000,000 Гц до 460000,005 Гц в пределах двух последовательных РЧ циклов внутри одной А-линии. Поэтому шаблон может не точно согласовываться с соответствующей подчастью части А, если корректирующий сигнал используется для коррекции первой части А. Поэтому для того чтобы улучшить точность согласования, может быть обеспечен небольшой сдвиг в выборках. Однако, если повышающая дискретизация выполняется с коэффициентом повышения, равным, например, 16, как описано выше, разрешающая способность увеличивается до 0,0625 выборок, то есть, если до повышающей дискретизации расстояние между последовательными выборками было равно единице, то теперь это расстояние равно 0,0625. Было обнаружено, что такое разрешение достаточно для компенсации изменения РЧ частоты внутри одной А-линии.
Модуль 17 определения корректирующего сигнала может быть дополнительно выполнен с возможностью пересчета РЧ основной частоты в дробную частоту в выборках. Например, если положение максимума полиномиально интерполированной корреляции известно из описанной выше аппроксимирующей процедуры, основная РЧ частота для соответствующей А-линии известна. Вычисление может выполняться таким образом, чтобы определенная РЧ основная частота укладывалась в повышающую дискретизацию с предпочтительным коэффициентом 16, которая достигалась, как описано выше, выполнением повышающей дискретизации с коэффициентом два четыре раза. РЧ основная частота может быть пересчитана в ближайшую выборку, то есть РЧ основная частота может быть округлена до ближайшей выборки. Например, если определенная РЧ основная частота составляет 454,05 выборок, то она может быть пересчитана в 454,0625 выборок.
Модуль 5 управления ультразвуковым модулем предпочтительно выполняется с возможностью приложения зависящего от времени усиления к ультразвуковому сигналу. Модуль 17 определения корректирующего сигнала, поэтому, предпочтительно выполняется с возможностью приложения того же самого зависящего от времени усиления к корректирующему сигналу. Поэтому, модуль 17 определения корректирующего сигнала предпочтительно выполняется с возможностью компенсации корректирующего сигнала, то есть дискретизированных с повышением и отфильтрованных шаблонных РЧ структур, для коррекции амплитуды.
Фильтрующее устройство 15 дополнительно содержит модуль 17 коррекции для коррекции первой части А ультразвукового сигнала 19 на основе определенного корректирующего сигнала, чтобы отфильтровать влияние электрического модуля 31 из ультразвукового сигнала 19. В частности, модуль 17 коррекции выполнен с возможностью вычитания определенного корректирующего сигнала из первой части А ультразвукового сигнала 19.
Вычитание корректирующего сигнала, то есть последовательности дискретизированных с повышением РЧ структур, из первой части А ультразвукового сигнала может быть описано следующим уравнением:

где

В уравнении (6) 
delay,delay+U,delay+2U, …, UR+delay,
где U означает общий коэффициент повышающей дискретизации, который в приведенном выше примере с четырехкратным осуществлением повышающей дискретизации с коэффициентом 2 равен 16. Таким образом, из шаблонной РЧ структуры берется только каждая U-я выборка, в соответствии с общим коэффициентом U повышающей дискретизации.
При этом корректирующий сигнал вычитается из исходных данных А-линии, содержащих как отраженные от ткани ультразвуковые данные, так и РЧ помехи.
На фиг. 4 схематично и в качестве примера показана одна А-линия с РЧ помехами. На фиг. 5 схематично и в качестве примера показана подчасть второй части В для иллюстрации повышающей дискретизации и фильтрации. Исходные выборки обозначены кружками, а выборки с повышающей дискретизацией обозначены крестиками. Подчасть, показанная на фиг. 4, содержит около 2000/16 выборок по отношению к исходной дискретизации, если общий коэффициент повышающей дискретизации равен 16, то есть, около четверти шаблона, имеющего 454 выборки, по отношению к исходной дискретизации в описанном выше варианте осуществления. На фиг. 5 высокая амплитуда между метками 2000 и 3000 представляет собой половину действительного цикла РЧ помех. Поскольку РЧ помехи возникают при пересечениях нуля, и РЧ цикл является синусоидой, существуют две почти одинаковые, но не полностью идентичные РЧ помехи на РЧ цикл.
На фиг. 6 схематично и в качестве примера показана восстановленная структура РЧ помех, то есть последовательность РЧ шаблонов, соответствующих А-линии, которая может быть вычтена из А-линии. Формирование последовательности РЧ шаблонов и вычитание предпочтительно выполняется только для первой части А ультразвукового сигнала. Одна шаблонная РЧ структура обведена рамкой 45. Последовательные структуры, образующие корректирующий сигнал, показанный на фиг. 6, изменяются, поскольку разные выборки дискретизированных с повышением шаблонных РЧ структур используются для вычитания в соответствии с уравнением (6).
Корректирующий сигнал вычитается в каждый момент времени в А-линии, по меньшей мере в первой части А в А-линии, где возникает РЧ помеха. Результирующие А-линии могут сцепляться друг с другом, образуя ультразвуковое изображение в М-режиме. На фиг. 8 показано такое ультразвуковое изображение в М-режиме без выполнения описанной выше коррекции, а на фиг. 9 показано ультразвуковое изображение в М-режиме после выполнения коррекции. Как можно ясно увидеть, в ультразвуковом изображении М-режима, показанном на фиг. 9, РЧ помехи уменьшены.
Согласно фиг. 1, ультразвуковое считывающее устройство 1 дополнительно содержит модуль 103 определения воздействия на объект для определения воздействия приложенной к объекту 4 энергии в зависимости от ультразвукового считывания объекта 4. В частности, модуль 31 приложения энергии выполнен с возможностью абляции объекта 4, при этом модуль 103 определения воздействия на объект выполнен с возможностью определения глубины абляции, которая может также рассматриваться как граница разрушения, в зависимости от ультразвукового считывания объекта 4. Поэтому модуль 103 определения воздействия на объект выполнен с возможностью приема ультразвукового сигнала от ультразвукового модуля 5 и определения глубины абляции в зависимости от принятого ультразвукового сигнала. Определение глубины абляции, а также толщины стенки сердца, основанное на ультразвуковом изображении в М-режиме, описано, например, в публикации WO 2010/082146 A1, включенной сюда посредством ссылки. Например, модуль 103 определения воздействия на объект может быть выполнен с возможностью определения положения передней поверхности и задней поверхности стенки сердца по ультразвуковому сигналу, и определения толщины стенки сердца в зависимости от этих положений, то есть, соответствующие положения по глубине могут быть вычтены друг из друга, чтобы определить толщину стенки сердца.
Вспомогательный модуль 6 управления предпочтительно выполняется с возможностью управления абляционным электродом 31 в зависимости от глубины абляции, определенной модулем 103 определения воздействия на объект. Например, величина и/или продолжительность приложения абляционной энергии к объекту 4 контролируется в зависимости от определенной глубины абляции. В частности, модуль 103 определения воздействия на объект может быть выполнен с возможностью определения толщины стенки сердца, и затем вспомогательный модуль 6 управления может быть выполнен с возможностью управления абляционным электродом 31 в зависимости от этой определенной толщины и определенной глубины абляции. Предпочтительно вспомогательный модуль 6 абляции выполняется с возможностью абляции ткани стенки сердца вплоть до достижения желаемой степени трансмуральности (пронизания) стенки сердца, в частности до тех пор, пока результирующее разрушение не станет трансмуральным.
Предпочтительно, ультразвуковое считывающее устройство 1 выполняется с возможностью определения толщины стенки сердца и глубины абляции неоднократно, при этом модуль 103 определения глубины абляции выполняется с возможностью повторного определения степени трансмуральности абляции по определенной толщине и определенной глубине абляции. В частности, ультразвуковое считывающее устройство 1 выполняется с возможностью прекращения процедуры абляции, если была достигнута заданная степень трансмуральности абляции.
Ультразвуковое считывающее устройство 1 дополнительно содержит модуль 20 визуализации для визуального наблюдения глубины абляции. В частности, модуль 20 визуализации выполнен с возможностью визуального наблюдения за продвижением к границе разрушения. Визуализация предпочтительно осуществляется в реальном времени. Модуль 20 визуализации предпочтительно выполняется с возможностью показа ультразвукового сигнала, продвижения абляции, то есть границы разрушения, и положений передней и задней поверхностей.
Ультразвуковое считывающее устройство 1 предпочтительно используется в сочетании с системой для определения положения и/или ориентации катетера 12, в частности, внутри объекта 4, преимущественно внутри сердца человека или животного. В этом варианте осуществления система формирования изображений, подобная магнитно-резонансной системе, используется для определения положения и/или ориентации катетера. Такая система формирования изображений обведена пунктирной линией 8 на фиг. 1. Катетер 12, в частности, наконечник катетера, может содержать элементы для облегчения определения ориентации и/или положения катетера посредством использования системы 8 формирования изображений. Например, наконечник катетера может содержать следящую катушку, если наконечник катетера используется в составе магнитно-резонансной системы формирования изображений, или элементы, которые могут быть идентифицированы на рентгеновском изображении и которые имеют такую форму, что становится возможным определение положения и/или ориентации катетера при использовании рентгеноскопической системы. Наконечник катетера может также содержать датчик положения для определения положения и/или ориентации катетера 12, в частности, наконечника катетера внутри объекта 4.
Система позиционирования позволяет пользователю располагать катетер 12 внутри сердца или, более в частности, в левом предсердии пациента. Пользователь может располагать катетер 12 в точном положении относительно стенки сердца, чтобы измерить толщину стенки, используя ультразвуковой сигнал, генерируемый ультразвуковым модулем 11, и модуль 103 определения воздействия на объект. Используя определенное положение катетера, можно отображать на дисплее толщину стенки сердца в изображении сердца. После сбора результатов достаточного числа измерений, то есть после определения толщины сердца в разных местоположениях на стенке сердца, пользователь может установить стратегию абляции, включающую в себя требуемую мощность и продолжительность в зависимости от определенной толщины стенки сердца. Можно также использовать наконечник катетера для отслеживания ранее выполненных абляционных разрушений в целях верификации. Могут быть определены целостность и глубина разрушений, которые были созданы.
Далее будет описан примерный вариант осуществления способа фильтрации для фильтрации ультразвукового сигнала со ссылками на блок-схему последовательности операций, изображенную на фиг. 10.
Ультразвуковой сигнал может подвергаться воздействию электрического модуля и содержать первую часть, содержащую информацию об объекте, от которого был принят ультразвуковой сигнал, и вторую часть, не содержащую принятой информации об объекте. На этапе 201 корректирующий сигнал, указывающий влияние электрического модуля на ультразвуковой сигнал, определяется из второй части ультразвукового сигнала, модулем определения корректирующего сигнала. На этапе 202 первая часть ультразвукового сигнала корректируется корректирующим модулем на основе определенного корректирующего сигнала, чтобы отфильтровать влияние электрического модуля из ультразвукового сигнала.
На фиг. 11 показана блок-схема последовательности операций, иллюстрирующая примерный вариант осуществления способа ультразвукового считывания для считывания объекта.
На этапе 301 генерируется ультразвуковой сигнал в зависимости от ультразвуковых волн, принятых от объекта ультразвуковым модулем, причем ультразвуковой модуль и дополнительный модуль, являющийся электрическим модулем, включены в состав катетера, причем ультразвуковой модуль и электрический модуль работают одновременно, и при этом ультразвуковой сигнал подвергается воздействию электрического модуля и включает в себя первую часть, содержащую информацию об объекте, от которого был принят ультразвуковой сигнал, и вторую часть, не содержащую информацию об объекте. На этапе 302 выполняются операции фильтрации способа фильтрации, описанные выше со ссылкой на фиг. 10, при этом модуль определения корректирующего сигнала определяет корректирующий сигнал, указывающий влияние электрического модуля на генерируемый ультразвуковой сигнал, из второй части ультразвукового сигнала, и при этом корректирующий модуль корректирует первую часть ультразвукового сигнала, основываясь на определенном корректирующем сигнале, чтобы отфильтровать влияние электрического модуля из первой части ультразвукового сигнала.
Фильтрующее устройство предпочтительно обеспечивает цифровой фильтр, основанный на преобразовании частоты выборок, для фильтрации РЧ без влияния на ультразвуковой сигнал. Этот цифровой фильтр может применяться в реальном времени, обеспечивая тем самым визуализацию невозмущенных ультразвуковых сигналов, которые могут обрабатываться и/или наблюдаться во время, например, медицинской процедуры.
При объединении абляции с ультразвуковым мониторингом катетера выполняется как ультразвуковое считывание, так и абляция. Хотя разные соединительные провода используются для обоих сигналов, РЧ сигналы, имеющие очень высокую мощность, могут оказывать непрямое воздействие через связь на провода с ультразвуковыми сигналами. Такое воздействие может возникать внутри катетера через емкостную связь из-за неэффективного экранирования или внутри сердца вследствие кондуктивной связи, например, через кровь и/или соляную промывающую текучую среду. Обычно РЧ частоты в диапазоне около от 450 до 500 кГц лежат за пределами полосы частот, представляющей интерес при формировании ультразвуковых изображений, которая в общем случае находится между около 1 и 50 МГц. Однако есть гармоники и помехи, которые могут привести к интерференционным картинам с постоянными интервалами в ультразвуковом сигнале, когда синусоидальная кривая пересекает уровень постоянного тока (DC). Поэтому ультразвуковой сигнал с малой амплитудой может быть замаскирован РЧ помехами.
При медицинском формировании изображений ультразвуковые преобразователи разных частот используются вплоть до частоты 50 МГц. Для отслеживания разрушений при интеграции РЧ абляции и ультразвукового отслеживания предпочтительно используются ультразвуковые преобразователи с центральной частотой в диапазоне около от 20 до 30 МГц. Для того чтобы получить высокое разрешение, ультразвуковые сигналы принимаются на высокой частоте, равной, например, 200 МГц на А-линию. Выборки из А-линии обычно производятся при частоте 20-100 Гц, чтобы получить изображение в М-режиме, однако возможна также и более высокая частота выборок, например до 1 кГц. Несколько разных способов фильтрации могут использоваться для фильтрации РЧ, но они должны работать в реальном времени, то есть должна быть возможной обработка многих выборок за секунду. Описанное выше фильтрующее устройство может быть выполнено с возможностью удаления РЧ помех из ультразвукового сигнала в реальном времени, не влияя на качество ультразвукового сигнала. Кроме того, соответствующий алгоритм предпочтительно оптимизирован для запуска на конкретных аппаратных микросхемах (чипах), в частности, на процессорах цифровой обработки сигналов (DSP).
Хотя в описанных выше вариантах осуществления корректирующий сигнал используется для коррекции первой части А ультразвукового сигнала, корректирующий сигнал может быть также использован для коррекции полного ультразвукового сигнала, включающего в себя первую часть А и вторую часть В.
Хотя в описанных выше вариантах осуществления были описаны конкретные этапы обработки для обработки РЧ шаблонных структур, в других вариантах осуществления могут также выполняться другие этапы обработки. Например, вместо интерполяционного БИХ-фильтра в качестве фильтра с частичной задержкой может использоваться фильтр с конечной импульсной характеристикой (КИХ-фильтр). Кроме того, может быть также использован стандартный интерполяционный БИХ-фильтр, который не является двунаправленным взаимным фильтром.
Хотя в описанных выше вариантах осуществления электрический модуль, который оказывает влияние на ультразвуковой сигнал, является абляционным электродом, в других вариантах осуществления электрический модуль может быть и другим модулем, таким как модуль формирования рентгеновских изображений или электрический нож, который может вызывать помехи и/или шумы.
Ультразвуковое считывающее устройство и фильтрующее устройство предпочтительно выполняются с возможностью использования визуализации ткани во время лечения, например, аритмии сердца или абляции опухоли, причем РЧ абляция и ультразвуковая визуализация объединяются в одном катетере или в одной игле. Алгоритм, реализуемый в фильтрующем устройстве, может быть полезным для удаления также других помех с другими характеристиками, таких как РЧ помехи, из представляющих интерес сигналов.
Хотя ультразвуковое считывающее устройство предпочтительно выполняется как катетер для отслеживания сердечной абляции, который может быть использован в сочетании с генератором РЧ сигналов, ультразвуковое считывающее устройство может быть также выполнено с возможностью считывания других объектов, подобных другим частям человека или животного, таким как другой орган или сосуды, или технического объекта, такого как трубопровод. Кроме того, вместо подачи РЧ энергии электрический модуль может быть также выполнен с возможностью подачи другой электрической энергии на объект.
Хотя в варианте осуществления, описанном выше со ссылкой на фиг. 2, катетер содержит только электрический модуль, являющийся абляционным электродом, и ультразвуковой модуль, катетер может содержать дополнительные элементы, такие как дополнительные считывающие элементы и/или дополнительные элементы подачи энергии, элементы промывания и т.п.
Другие разновидности описанных вариантов осуществления могут быть поняты и осуществлены специалистами в данной области техники при практическом применении заявляемого изобретения, на основе изучения чертежей, описания и прилагаемых пунктов формулы изобретения.
В пунктах формулы изобретения слово “содержащий” не исключает других элементов или этапов, а единственное число не исключает множественности.
Один модуль или устройство может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Простой факт того, что определенные показатели повторены во взаимно отличающихся зависимых пунктах формулы изобретения, не указывает на то, что сочетание двух этих показателей не может быть использовано, чтобы достичь преимуществ изобретения.
Вычисления, подобные вычислению основной РЧ частоты, определение корректирующего сигнала, коррекция первой части ультразвукового сигнала в зависимости от корректирующего сигнала и т.п., выполняемые одним или несколькими модулями или устройствами, могут выполняться любым другим числом модулей или устройств. Например, определение основной РЧ частоты, определение корректирующего сигнала, коррекция ультразвукового сигнала в зависимости от определенного корректирующего сигнала, определение, например, глубины абляции в зависимости от скорректированного абляционного сигнала и т.п., могут выполняться одним модулем или любым другим числом разных модулей. Вычисления и/или управление фильтрующим устройством в соответствии со способом фильтрации или управление ультразвуковым считывающим устройством в соответствии со способом ультразвукового считывания могут быть реализованы в виде средств программного кода компьютерной программы и/или как выделенных аппаратных средств.
Компьютерная программа может храниться/распространяться на подходящем носителе, таком как оптический носитель информации или твердотельный носитель, который поставляется вместе или как часть другого аппаратного обеспечения, но может также распространяться другим образом, например, через Интернет (Internet) или другие проводные или беспроводные телекоммуникационные системы.
Любые ссылочные позиции в формуле изобретения не следует рассматривать как ограничивающие ее объем.
Изобретение относится к фильтрующему устройству для фильтрации ультразвукового сигнала, который подвергается воздействию электрического модуля и содержит первую часть, включающую в себя информацию об объекте, от которого был принят ультразвуковой сигнал, и вторую часть, не содержащую информацию об объекте. Модуль определения корректирующего сигнала определяет корректирующий сигнал, указывающий влияние электрического модуля на ультразвуковой сигнал, из второй части ультразвукового сигнала, а корректирующий модуль корректирует первую часть ультразвукового сигнала на основе определенного корректирующего сигнала, чтобы отфильтровать влияние электрического модуля из ультразвукового сигнала. Поскольку корректирующий сигнал указывает влияние электрического модуля, то когда этот корректирующий сигнал используется для коррекции ультразвукового сигнала, нежелательные помехи, видимые в нефильтрованном ультразвуковом сигнале, могут быть отфильтрованы.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ДЛЯ ОБНАРУЖЕНИЯ ОБЪЕКТА | 2011 |
|
RU2594809C2 |
| УСТРОЙСТВО ВИЗУАЛИЗАЦИИ | 2010 |
|
RU2540090C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ СВОЙСТВ ДЛЯ ОПРЕДЕЛЕНИЯ СВОЙСТВА ОБЪЕКТА | 2011 |
|
RU2567268C2 |
| ЭНЕРГОПОДАЮЩЕЕ УСТРОЙСТВО ДЛЯ ПОДАЧИ ЭНЕРГИИ К ОБЪЕКТУ | 2011 |
|
RU2572748C2 |
| МЕДИЦИНСКОЕ УЛЬТРАЗВУКОВОЕ УСТРОЙСТВО С ОПРЕДЕЛЕНИЕМ УСИЛИЯ | 2010 |
|
RU2556975C2 |
| АППАРАТ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ | 2011 |
|
RU2588290C2 |
| ИНТЕРВЕНЦИОННАЯ МР-ТОМОГРАФИЯ С КОМПЕНСАЦИЕЙ ДВИЖЕНИЯ | 2010 |
|
RU2580189C2 |
| КОРРЕКЦИЯ СКОРОСТИ ОРОШЕНИЯ ПРИ РАДИОЧАСТОТНОЙ (РЧ) АБЛЯЦИИ В ОТВЕТ НА ИЗМЕНЕНИЕ УСИЛИЯ КОНТАКТА | 2020 |
|
RU2737762C1 |
| УСТРОЙСТВО ПОДАЧИ ЭНЕРГИИ | 2013 |
|
RU2669745C2 |
| СОЧЕТАНИЕ IRE И РЧ-АБЛЯЦИИ С ИСПОЛЬЗОВАНИЕМ ГЕНЕРАТОРА СИНУСОИДАЛЬНЫХ СИГНАЛОВ | 2021 |
|
RU2768170C1 |

Группа изобретений относится к медицинской технике, а именно к средствам фильтрации ультразвукового сигнала при абляционной процедуре. Фильтрующее устройство ультразвукового сигнала, в котором ультразвуковой сигнал подвергается воздействию электрического модуля и содержит первую часть (А), содержащую информацию об объекте, от которого был принят ультразвуковой сигнал, и вторую часть (В), не содержащую информацию об объекте, содержит модуль определения корректирующего сигнала, указывающего влияние электрического модуля на ультразвуковой сигнал, из второй части (В) ультразвукового сигнала и корректирующий модуль, выполненный с возможностью коррекции первой части (А) ультразвукового сигнала на основе определенного корректирующего сигнала, чтобы отфильтровать влияние электрического модуля из ультразвукового сигнала. Ультразвуковое считывающее устройство содержит катетер, включающий ультразвуковой модуль генерации ультразвукового сигнала, зависящего от ультразвуковых волн, принятых от объекта, дополнительный модуль, являющийся электрическим модулем, выполненные с возможностью одновременной работы, и фильтрующее устройство. Способ фильтрации ультразвукового сигнала состоит в использовании фильтрующего устройства и машиночитаемого носителя информации, хранящего компьютерную программу фильтрации ультразвукового сигнала. Способ ультразвукового считывания объекта обеспечивается машиночитаемым носителем информации, хранящим компьютерную программу ультразвукового считывания объекта, и содержит этапы генерации ультразвукового сигнала посредством ультразвукового модуля, причем ультразвуковой и дополнительный модули включены в состав катетера и работают одновременно. Использование группы изобретений позволяет снизить влияние радиочастотного модуля. 6 н. и 9 з.п. ф-лы, 11 ил.
1. Фильтрующее устройство для фильтрации ультразвукового сигнала, причем ультразвуковой сигнал (19) подвергается воздействию электрического модуля и содержит первую часть (А), содержащую информацию об объекте (4), от которого был принят ультразвуковой сигнал (19), и вторую часть (В), не содержащую информацию об объекте (4), при этом фильтрующее устройство (15) содержит:
модуль (17) определения корректирующего сигнала, выполненный с возможностью определения корректирующего сигнала, указывающего влияние электрического модуля на ультразвуковой сигнал (19), из второй части (В) ультразвукового сигнала;
корректирующий модуль (18), выполненный с возможностью коррекции первой части (А) ультразвукового сигнала (19) на основе определенного корректирующего сигнала, чтобы отфильтровать влияние электрического модуля (31) из ультразвукового сигнала (19).
2. Фильтрующее устройство по п. 1, в котором корректирующий модуль (18) выполнен с возможностью вычитания определенного корректирующего сигнала из первой части (А) ультразвукового сигнала (19).
3. Фильтрующее устройство по п. 2, причем
фильтрующее устройство (15) содержит модуль (16) обеспечения основной частоты для обеспечения основной частоты воздействия, оказываемого электрическим модулем;
модуль (17) определения корректирующего сигнала выполнен с возможностью определения подчасти второй части ультразвукового сигнала, которая соответствует по меньшей мере одному циклу воздействия, оказываемого электрическим модулем, в зависимости от обеспеченной основной частоты, и определения корректирующего сигнала в зависимости от определенной подчасти второй части (В) ультразвукового сигнала.
4. Фильтрующее устройство по п. 3, в котором модуль (16) обеспечения основной частоты выполнен с возможностью определения основной частоты посредством кросс-корреляции двух последовательных подчастей второй части (В) ультразвукового сигнала (19).
5. Фильтрующее устройство по п. 3, в котором модуль (17) определения корректирующего сигнала выполнен с возможностью повышающей дискретизации подчасти второй части (В).
6. Фильтрующее устройство по п. 5, в котором модуль (17) определения корректирующего сигнала выполнен с возможностью применения фильтра с бесконечной импульсной характеристикой (БИХ-фильтра) к дискретизированной с повышением подчасти второй части (В).
7. Фильтрующее устройство по п. 5, в котором модуль (17) определения корректирующего сигнала выполнен с возможностью применения двунаправленного взаимного БИХ-фильтра к подчасти второй части (В).
8. Фильтрующее устройство по п. 5, в котором модуль (17) определения корректирующего сигнала выполнен с возможностью многократного выполнения следующих этапов:
повышающей дискретизации подчасти второй части (В) с коэффициентом 2;
применения БИХ-фильтра к дискретизированной с повышением подчасти второй части (В).
9. Фильтрующее устройство по п. 1, причем к ультразвуковому сигналу было применено зависящее от времени усиление, и модуль (17) определения корректирующего сигнала выполнен с возможностью применения зависящего от времени усиления также и к корректирующему сигналу.
10. Ультразвуковое считывающее устройство для считывания объекта, причем ультразвуковое считывающее устройство (1) содержит:
катетер (12), включающий в себя ультразвуковой модуль (32) для генерации ультразвукового сигнала (19), зависящего от ультразвуковых волн, принятых от объекта (4), и дополнительный модуль (31), являющийся электрическим модулем, причем ультразвуковой модуль (32) и электрический модуль (31) выполнены с возможностью одновременной работы, при этом генерируемый ультразвуковой сигнал (19) подвергается воздействию электрического модуля (31) и включает в себя первую часть (А), содержащую информацию об объекте (4), от которого был принят ультразвуковой сигнал (19), и вторую часть (В), не содержащую информацию об объекте (4);
фильтрующее устройство (15) по п. 1, в котором модуль (17) определения корректирующего сигнала выполнен с возможностью определения корректирующего сигнала, указывающего воздействие электрического модуля (31) на генерируемый ультразвуковой сигнал (19), из второй части (В) ультразвукового сигнала, и в котором корректирующий модуль (18) выполнен с возможностью коррекции первой части (А) ультразвукового сигнала (19) на основе определенного корректирующего сигнала, чтобы отфильтровать влияние электрического модуля (31) из первой части (А) ультразвукового сигнала (19).
11. Ультразвуковое считывающее устройство по п. 10, в котором электрический модуль (31) является электродом для подачи электрической энергии на объект (4).
12. Способ фильтрации для фильтрации ультразвукового сигнала, причем ультразвуковой сигнал (19) подвергается воздействию электрического модуля и содержит первую часть (А), содержащую информацию об объекте (4), от которого был принят ультразвуковой сигнал (19), и вторую часть (В), не содержащую информацию об объекте, причем способ фильтрации содержит этапы, на которых:
определяют корректирующий сигнал, указывающий влияние электрического модуля на ультразвуковой сигнал (19), из второй части (В) ультразвукового сигнала (19), посредством модуля (17) определения корректирующего сигнала;
корректируют первую часть (А) ультразвукового сигнала (19) на основе определенного корректирующего сигнала, чтобы отфильтровать влияние электрического модуля (31) из ультразвукового сигнала (19) посредством корректирующего модуля (18).
13. Способ ультразвукового считывания для считывания объекта, причем способ ультразвукового считывания содержит этапы:генерации ультразвукового сигнала (19), зависящего от ультразвуковых волн, принятых от объекта (4), посредством ультразвукового модуля (32), причем ультразвуковой модуль (32) и дополнительный модуль (31), являющийся электрическим модулем (31), включены в состав катетера (12), при этом ультразвуковой модуль (32) и электрический модуль (31) работают одновременно, и при этом генерируемый ультразвуковой сигнал (19) подвергается воздействию электрического модуля (31) и включает в себя первую часть (А), содержащую информацию об объекте (4), от которого был принят ультразвуковой сигнал (19), и вторую часть (В), не содержащую информацию об объекте (4);
этапы фильтрации способа фильтрации по п. 12, на которых модуль (17) определения корректирующего сигнала определяет корректирующий сигнал, указывающий влияние электрического модуля (31) на генерируемый ультразвуковой сигнал (19), из второй части (В) ультразвукового сигнала (19), и на которых корректирующий модуль (18) корректирует первую часть (А) ультразвукового сигнала (19) на основе определенного корректирующего сигнала, чтобы отфильтровать влияние электрического модуля (31) из первой части (А) ультразвукового сигнала.
14. Машиночитаемый носитель информации, хранящий компьютерную программу фильтрации для фильтрации ультразвукового сигнала, причем компьютерная программа фильтрации содержит средства программного кода для предписания фильтрующему устройству по п. 1 выполнять этапы способа фильтрации по п. 12, когда компьютерная программа фильтрации исполняется на компьютере, управляющем фильтрующим устройством.
15. Машиночитаемый носитель информации, хранящий компьютерную программу ультразвукового считывания для считывания объекта, причем компьютерная программа ультразвукового считывания содержит средства программного кода для предписания ультразвуковому считывающему устройству по п. 10 выполнять этапы способа ультразвукового считывания по п. 13, когда компьютерная программа исполняется на компьютере, управляющем ультразвуковым считывающим устройством.
| WO 2010082146 A1,22.07.2010;AU 2009251074 A1, 21.01.2010;US 2005124898 A1, 09.06.2005 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕЛЬЧЕНИЯ И АСПИРАЦИИ СГУСТКОВ КРОВИ ИЗ ПОЛОСТИ | 2006 |
|
RU2333011C1 |
| M.M.Nillesen et al | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

