ОБЛАСТЬ ИЗОБРЕТЕНИЯ
Изобретение относится к аппарату определения местоположения, способу определения местоположения и компьютерной программе определения местоположения для определения местоположения первого объекта внутри второго объекта, в частности, для определения местоположения устройства в теле, такого как катетер или игла внутри сердца человека.
УРОВЕНЬ ТЕХНИКИ
В US 7604601 B2 раскрыта система медицинской визуализации для визуализации организма пациента. Система медицинской визуализации содержит катетер, который имеет датчик положения и датчик ультразвуковой визуализации, причем датчик положения испускает электрические сигналы, отражающие информацию о положении части катетера в организме пациента, а датчик ультразвуковой визуализации испускает ультразвуковую энергию к целевому объекту в организме пациента, принимает ультразвуковое эхо, отраженное от целевого объекта в организме пациента, и испускает сигналы, связанные с ультразвуковым эхом, отраженным от целевого объекта в организме пациента. Процессор положения функционально связан с катетером для определения информации о положении части катетера на основе электрических сигналов, испускаемых датчиком положения. Система дополнительно содержит дисплей и процессор изображений, функционально связанный с катетером, процессором положения и дисплеем. Процессор изображений отображает на дисплее пиктограмму катетера в той же ориентации, что и ориентация части катетера в организме пациента, основываясь на информации о положении, получаемой от датчика положения. Процессор изображений также генерирует ультразвуковое изображение целевого объекта, основываясь на сигналах, испускаемых ультразвуковым датчиком, и изображает в реальном времени генерируемое ультразвуковое изображение на дисплее в той же ориентации, что и ориентация части катетера в организме пациента. Информация о положении части катетера, которая основана на электрических сигналах, испускаемых датчиком положения, может иметь относительно низкую точность, что может вести к неточному определению положения катетера в организме пациента.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Цель настоящего изобретения состоит в том, чтобы предоставить аппарат определения местоположения для предоставления альтернативного пути определения местоположения первого объекта внутри второго объекта, в частности, определения местоположения устройства в теле внутри сердца человека, который может вести к повышенной точности определения местоположения.
В первом аспекте настоящего изобретения представлен аппарат определения местоположения для определения местоположения первого объекта внутри второго объекта, причем аппарат определения местоположения содержит:
первый объект, содержащий первый ультразвуковой блок,
второй ультразвуковой блок, подлежащий расположению за пределами второго объекта, причем первый ультразвуковой блок и второй ультразвуковой блок выполнены с возможностью передавать ультразвуковые сигналы между собой,
блок генерации ультразвукового изображения для генерации ультразвукового изображения второго объекта, основываясь на ультразвуковой информации по меньшей мере от одного из первого ультразвукового блока и второго ультразвукового блока,
блок определения местоположения для определения местоположения первого объекта внутри второго объекта по отношению к ультразвуковому изображению, основываясь на передаваемых ультразвуковых сигналах, передаваемых между первым и вторым ультразвуковыми блоками, и ультразвуковой информации по меньшей мере от одного из первого ультразвукового блока и второго ультразвукового блока.
Поскольку ультразвуковые сигналы передаются между первым и вторым ультразвуковыми блоками, причем первый ультразвуковой блок содержится в первом объекте и второй ультразвуковой блок расположен за пределами второго объекта, и поскольку местоположение первого объекта внутри второго объекта определяются, основываясь на передаваемых ультразвуковых сигналах, местоположение первого объекта внутри второго объекта можно надежно определять по альтернативному пути, т.е. без необходимости полагаться на электрические сигналы, испускаемые датчиком положения, что может вести к повышенной точности определения местоположения.
Первый объект предпочтительно представляет собой устройство в теле, такое как катетер, в частности, кончик катетера, а второй объект предпочтительно представляет собой часть человека или животного, такую как орган, в частности, сердце. Например, кончик катетера может быть оборудован первым ультразвуковым блоком, а второй ультразвуковой блок может быть расположен за пределами сердца, например, установлен на груди человека.
Эти первый ультразвуковой блок и второй ультразвуковой блок выполнены с возможностью передавать ультразвуковые сигналы между собой, что обозначает, что первый ультразвуковой блок может испускать ультразвуковые сигналы, которые принимаются посредством второго ультразвукового блока, или что второй ультразвуковой блок может испускать ультразвуковые сигналы, которые принимаются посредством первого ультразвукового блока.
По меньшей мере, один из первого ультразвукового блока и второго ультразвукового блока может содержать несколько ультразвуковых преобразователей для передачи ультразвуковых сигналов между первым и вторым ультразвуковыми блоками. Например, первый ультразвуковой блок может содержать различные ультразвуковые преобразователи, расположенные на поверхности первого объекта.
В частности, по меньшей мере один из первого ультразвукового блока и второго ультразвукового блока может содержать несколько ультразвуковых преобразователей для передачи ультразвуковых сигналов между первым и вторым ультразвуковыми блоками, причем несколько ультразвуковых преобразователей испускают ультразвуковые сигналы на одной и той же или различных частотах. Предпочтительно первый ультразвуковой блок содержит несколько ультразвуковых преобразователей, установленных в положениях на или внутри первого объекта, которые известны по отношению к первому объекту, причем несколько ультразвуковых преобразователей испускают или принимают ультразвуковые сигналы на различных частотах для передачи ультразвуковых сигналов между несколькими ультразвуковыми преобразователями и вторым ультразвуковым блоком на различных частотах, и причем блок определения местоположения выполнен с возможностью определять ориентацию первого объекта, основываясь на передаваемых ультразвуковых сигналах и положениях нескольких ультразвуковых преобразователей, которые известны по отношению к первому объекту. В частности, блок определения местоположения может быть выполнен с возможностью определять первые положения, представляющие собой положения нескольких ультразвуковых преобразователей на первом объекте по отношению ко второму ультразвуковому блоку, и для того, чтобы определять ориентацию первого объекта по отношению ко второму ультразвуковому блоку, основываясь на определяемых первых положениях и вторых положениях, представляющих собой положения нескольких ультразвуковых преобразователей, которые известны по отношению к первому объекту. Следовательно, блок определения местоположения может быть выполнен с возможностью определять не только положение, но также ориентацию, например, кончика катетера.
Предпочтительно, смежные частоты разделяют посредством по меньшей мере суммы половины полосы пропускания ультразвуковых преобразователей со смежными частотами, причем полосу пропускания предпочтительно определяют как половину ширины при половине максимума. Это делает возможным четкое разделение смежных частот.
Несколько ультразвуковых преобразователей могут испускать ультразвуковые сигналы одновременно или попеременно.
В одном из вариантов осуществления по меньшей мере один из первого ультразвукового блока и второго ультразвукового блока содержит один или несколько двух- или трехмерных ультразвуковых преобразователей. В частности, предпочтительно первый объект, который предпочтительно представляет собой устройство в теле, такое как катетер, содержит несколько ультразвуковых преобразователей, которые испускают ультразвук одновременно или попеременно на одной и той же или различных частотах, и второй ультразвуковой блок содержит предпочтительно один или несколько двух- или трехмерных ультразвуковых преобразователей для приема испускаемого ультразвука. Альтернативно также второй ультразвуковой блок может испускать ультразвук, а первый ультразвуковой блок может принимать ультразвук.
Трехмерный ультразвуковой преобразователь представляет собой, например, широкополосный внешний массив субультразвуковых преобразователей, которые можно использовать для трехмерной трансторакальной эхографии (TTE) или трехмерного ультразвукового преобразователя для транслюминальной хирургии через естественные отверстия (NOT), который можно использовать для трехмерной чреспищеводной эхографии (TEE). Трехмерный ультразвуковой преобразователь также может иметь другую форму и/или размер.
Также предпочтительно, что блок определения местоположения выполнен с возможностью определять местоположение первого объекта внутри второго объекта, основываясь по меньшей мере на одном из времени прохождения и направления передачи передаваемых ультразвуковых сигналов. Например, положение катетера можно определять посредством времени прохождения и направленности одного или нескольких ультразвуковых преобразователей на катетер по отношению к внешнему одному или нескольким ультразвуковым преобразователям, находящимся за пределами сердца.
В предпочтительном варианте осуществления первый объект выполнен с возможностью измерять свойство второго объекта в местоположении, в котором первый объект размещают внутри второго объекта. Например, первый объект может представлять собой катетер, содержащий воспринимающий электрод на кончике катетера для снятия сигналов электрической активации в местоположении, которое определено посредством блока определения местоположения. Также предпочтительно, чтобы аппарат определения местоположения содержал блок определения карты для определения карты свойств, на основе определяемых местоположений первого объекта внутри второго объекта и свойств второго объекта, которые измерены в определяемых местоположениях. В частности, блок определения карты может быть выполнен с возможностью определять электроанатомическую карту, основываясь на сигналах электрической активации, измеряемых в положениях, определяемых посредством блока определения местоположения. Например, кончик катетера, содержащий воспринимающий электрод, можно перемещать в различные положения на стенке сердца, причем различные положения можно определять посредством блока определения местоположения, и причем сигналы электрической активации можно измерять в этих местоположениях и использовать для того, чтобы генерировать электроанатомическую карту. Это позволяет генерировать электроанатомическую карту точно.
Кроме того, предпочтительно, чтобы первый объект был выполнен с возможностью прикладывать энергию ко второму объекту в местоположении, в котором первым объект размещают внутри второго объекта. Например, первый объект может представлять собой катетер, содержащий абляционный элемент, такой как абляционный электрод, для абляции второго объекта, в частности, сердца человека или животного. Это позволяет прикладывать энергию ко второму объекту в желаемом местоположении, определяемом посредством блока определения местоположения.
Предпочтительно, блок определения карты дополнительно выполнен с возможностью определять карту приложения энергии, основываясь на определяемых местоположениях первого объекта внутри второго объекта, в которых прикладывали энергию. В частности, блок определения карты может быть выполнен с возможностью определять анатомическую карту, показывающую анатомические положения, в которых энергию прикладывали, в частности, в которых осуществляли абляцию сердечной ткани. Также свойства, такие как электрические свойства, измеряемые посредством воспринимающего электрода, и/или положения, в которых энергию следует прикладывать, можно показывать на анатомической карте. Следовательно, карта может представлять собой комбинированную карту, показывающую положения, в которых энергию прикладывали и/или которые подлежат приложению, и положения, в которых воспринимали свойство второго объекта, причем в последних положениях воспринятое свойство может быть показано.
Блок определения местоположения предпочтительно выполнен с возможностью определять местоположение первого объекта внутри второго объекта по отношению к положению второго ультразвукового блока. Положение второго ультразвукового блока может быть известно по отношению к опорной системе координат, чтобы определять местоположение первого объекта внутри второго объекта по отношению к опорной системе координат.
В одном из вариантов осуществления аппарат определения местоположения содержит фиксирующее приспособление для фиксации второго ультразвукового блока на субъекте, в котором расположен второй объект. Фиксирующее приспособление представляет собой, например, раму или робота, на который устанавливают второй ультразвуковой блок для того, чтобы удерживать второй ультразвуковой блок, в частности, ультразвуковые преобразователи второго ультразвукового блока, зафиксированными на субъекте, который предпочтительно представляет собой тело человека. Рама или робот могут представлять собой стереотаксическую раму или робот. Фиксирующее приспособление также может представлять собой жилет, в который встроен второй ультразвуковой блок и который может носить человек. При использовании фиксирующего приспособления может работать аппарат определения местоположения, в то время как второй ультразвуковой блок не меняет его положения. Например, если первый объект выполнен с возможностью прикладывать энергию ко второму объекту, в частности, если первый объект представляет собой абляционный катетер для осуществления лечения аритмии сердца, это приложение энергии можно осуществлять под ультразвуковым контролем, в то время как второй ультразвуковой блок не меняет своего положения или в то время как возможные движения второго ультразвукового блока по меньшей мере уменьшены. Фиксирующее приспособление может определять опорную систему координат, причем положение второго ультразвукового блока, в частности, положения ультразвуковых преобразователей второго ультразвукового блока, известно по отношению к опорной системе координат, и причем блок определения местоположения может определить местоположение первого объекта внутри второго объекта по отношению к опорной системе координат.
В одном из вариантов осуществления аппарат определения местоположения дополнительно содержит блок определения положения второго ультразвукового блока для определения положения второго ультразвукового блока по отношению к опорной системе координат, причем блок определения местоположения выполнены с возможностью определять положение первого объекта внутри второго объекта по отношению к опорной системе координат, основываясь на передаваемых ультразвуковых сигналах и определяемом положении второго ультразвукового блока по отношению к опорной системе координат. В этом варианте осуществления энергию можно точно прикладывать к желаемым местоположениям внутри второго объекта и/или можно точно воспринимать свойства в желаемых местоположениях внутри второго объекта, даже если второй ультразвуковой блок, в частности, ультразвуковые преобразователи второго ультразвукового блока, меняет положение во время соответствующей процедуры.
Блок определения положения второго ультразвукового блока может содержать трехмерные датчики положения, например, электромагнитные (ЕМ), оптические или волоконные датчики формы, которые прикрепляют ко второму ультразвуковому блоку, в частности, к ультразвуковым преобразователям второго ультразвукового блока, и которые могут непрерывно измерять положение второго ультразвукового блока.
Аппарат определения местоположения содержал блок генерации ультразвукового изображения для генерации ультразвукового изображения второго объекта на основе ультразвуковой информации по меньшей мере от одного из первого ультразвукового блока и второго ультразвукового блока, причем блок определения местоположения выполнен с возможностью определять местоположение первого объекта внутри второго объекта по отношению к ультразвуковому изображению, основываясь на ультразвуковых сигналах, передаваемых между первым и вторым ультразвуковыми блоками, и ультразвуковой информации. В предпочтительном варианте осуществления аппарат определения местоположения дополнительно содержит совмещающий блок для совмещения ультразвукового изображения с предварительно полученным изображением или моделью второго объекта, причем блок определения местоположения выполнен с возможностью определять местоположение первого объекта внутри второго объекта, основываясь на определяемом местоположении по отношению к ультразвуковому изображению и результату совмещения. Ультразвуковое изображение второго объекта предпочтительно представляет собой в настоящее время получаемое трехмерное ультразвуковое изображение, и предварительно полученное изображение предпочтительно представляет собой предварительно полученное трехмерное изображение в той же или другой модальности визуализации, такое как ультразвуковое изображение, компьютерно-томографическое изображение, магнитно-резонансное изображение, и так далее. Модель также предпочтительно является трехмерной. Аппарат определения местоположения предпочтительно выполнен с возможностью определять местоположение первого объекта внутри второго объекта, представленного на предварительно полученном изображении или посредством модели. В одном из вариантов осуществления ультразвуковое изображение можно генерировать в реальном времени во время хирургической процедуры, причем предварительно полученное изображение или модель, например, сердца, можно совмещать с ультразвуковым изображением в реальном времени для того, чтобы позволить аппарату определения местоположения определять местоположение первого объекта внутри второго объекта, основываясь на определяемом местоположении по отношению к ультразвуковому изображению и результате совмещения в реальном времени. В частности, местоположение, например, кончика катетера или кончика иглы может быть показано в реальном времени на предварительно полученном изображении или модели, например., сердца.
В дополнительном аспекте настоящего изобретения представлен способ определения местоположения для определения местоположения первого объекта внутри второго объекта, причем способ определения местоположения включает:
передачу ультразвуковых сигналов между первым ультразвуковым блоком, содержащемся в первом объекте, и вторым ультразвуковым блоком, расположенным за пределами второго объекта,
генерацию ультразвукового изображения второго объекта, основываясь на ультразвуковой информации по меньшей мере от одного из первого ультразвукового блока и второго ультразвукового блока, посредством блока генерации ультразвукового изображения, и
определение местоположения первого объекта внутри второго объекта по отношению к ультразвуковому изображению, основываясь на передаваемых ультразвуковых сигналах, передаваемых между первым и вторым ультразвуковыми блоками, и ультразвуковой информации по меньшей мере от одного из первого ультразвукового блока и второго ультразвукового блока, посредством блока определения местоположения.
В дополнительном аспекте настоящего изобретения представлена компьютерная программа для определения местоположения для определения местоположения первого объекта внутри второго объекта, причем компьютерная программа для определения местоположения содержит средства программного кода для управления аппаратом определения местоположения по п.1, для осуществления этапов способа определения местоположения по п.12, когда компьютерную программу для определения местоположения запускают на компьютере, управляющем аппаратом определения местоположения.
Следует понимать, что аппарат определения местоположения по п.1, способ определения местоположения по п.12 и компьютерная программа для определения местоположения по п.13 имеют схожие и/или идентичные предпочтительные варианты осуществления, в частности по зависимых пунктах формулы изобретения.
Следует понимать, что предпочтительный вариант осуществления изобретения также может представлять собой какую-либо комбинацию зависимых пунктов формулы изобретения с соответствующими независимыми пунктами формулы изобретения.
Эти и другие аспекты по изобретению видны из и разъяснены со ссылкой на варианты осуществления, описанные далее в настоящем документе.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
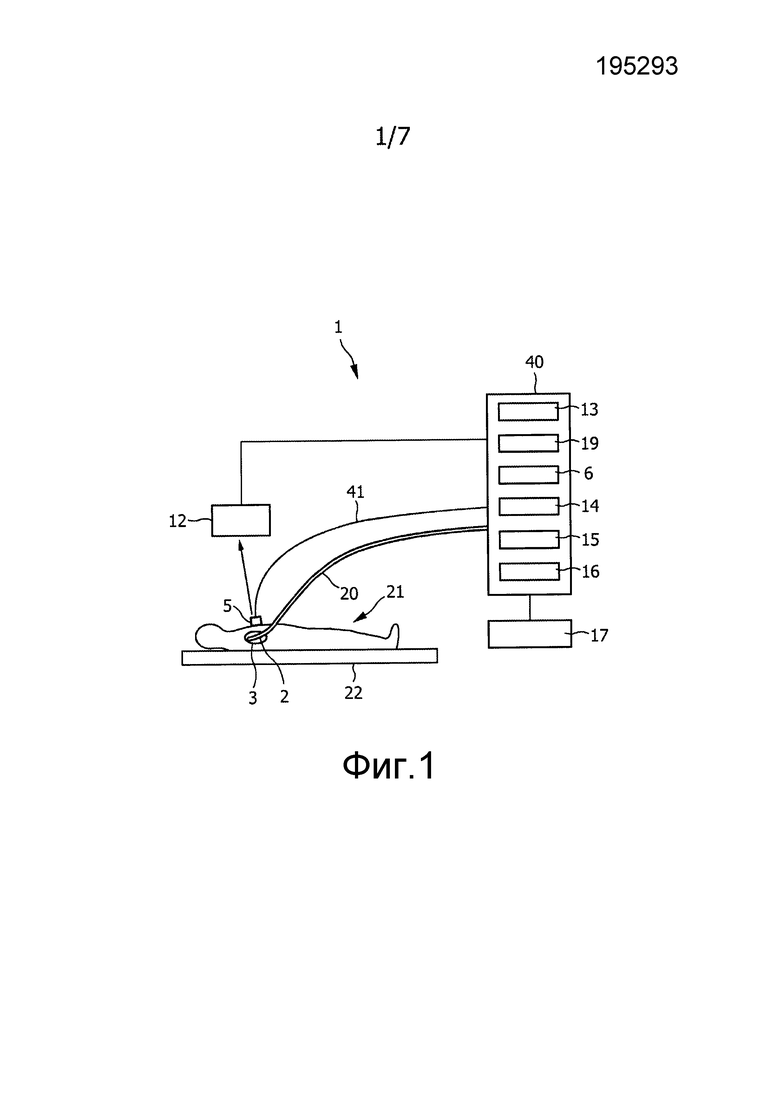
На фиг.1 представлен схематически и в качестве примера вариант осуществления аппарата определения местоположения для определения местоположения первого объекта внутри второго объекта,
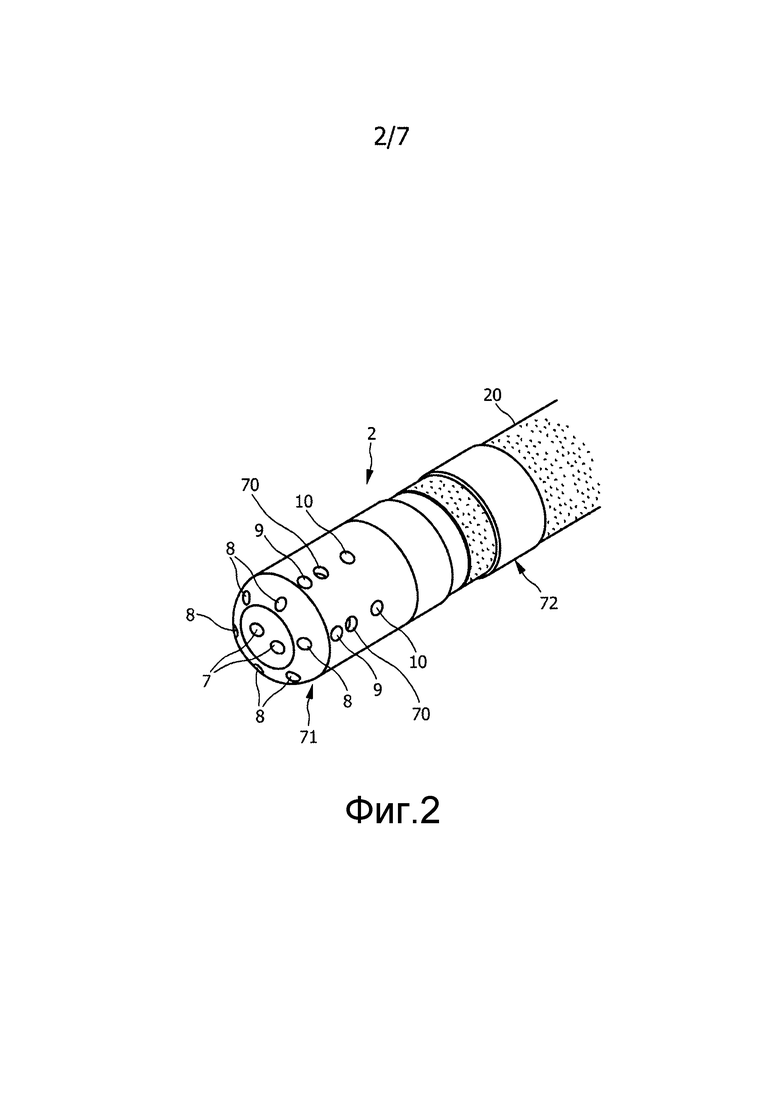
на фиг.2 представлен схематически и в качестве примера вариант осуществления кончика катетера,
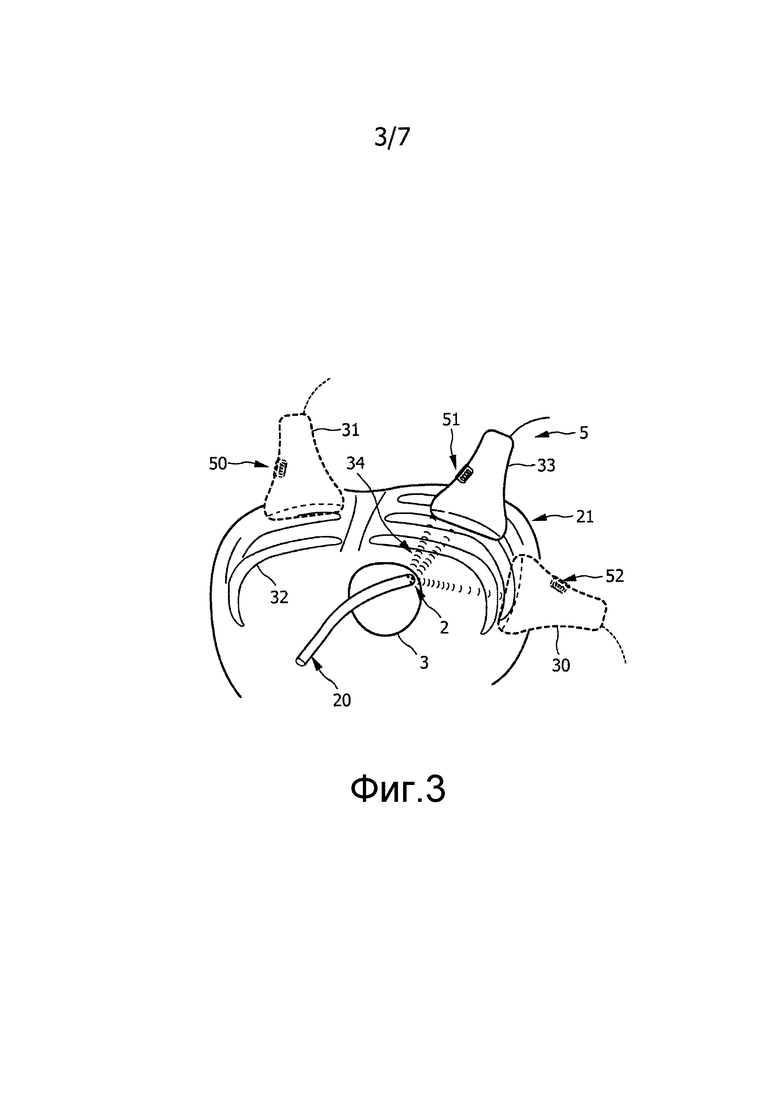
на фиг.3 представлено схематически и в качестве примера расположение ультразвуковых преобразователей на грудной клетке человека, которые осуществляют связь с ультразвуковыми преобразователями внутри сердца человека,
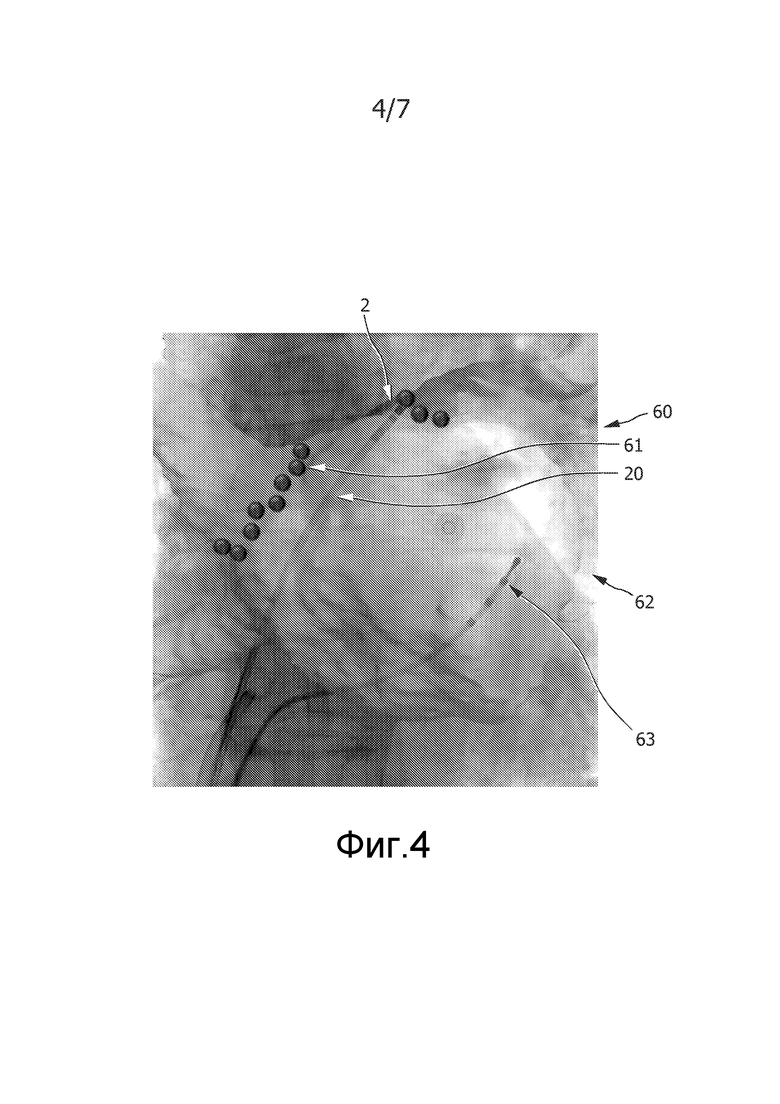
на фиг.4 представлена схематически и в качестве примера электроанатомическая карта с запланированными положениями абляции,
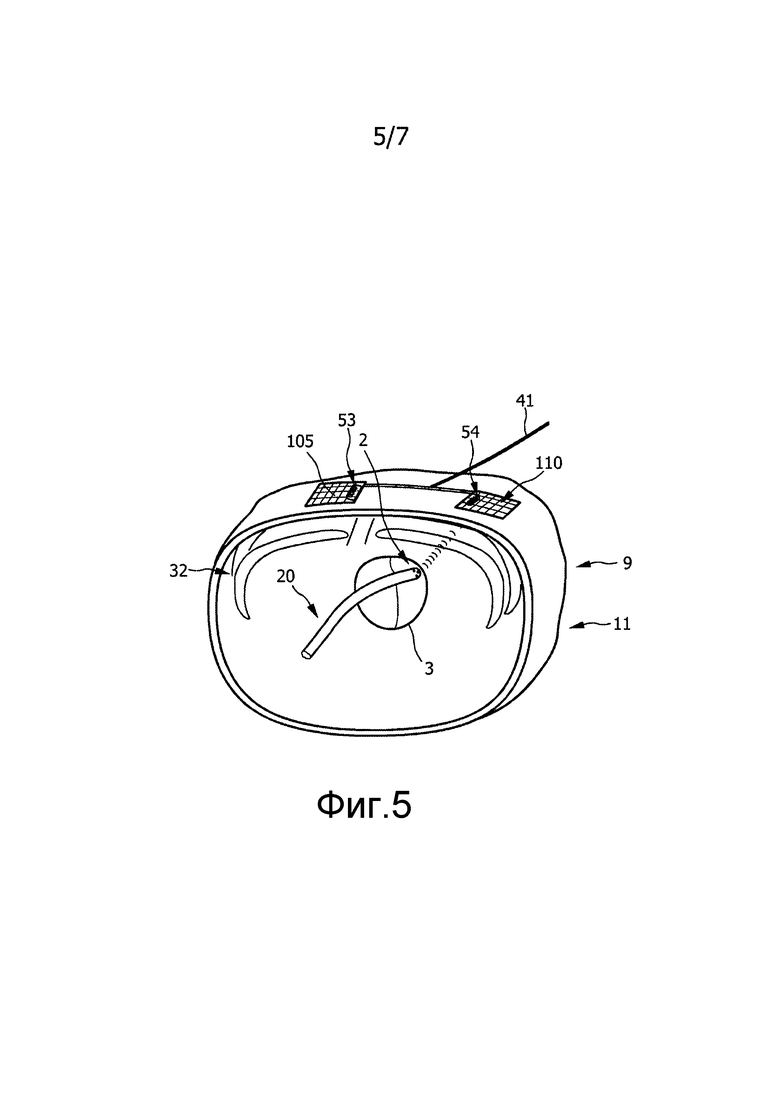
на фиг.5 представлен схематически и в качестве примера надеваемый человеком жилет, в который встроены ультразвуковые преобразователи, которые осуществляют связь с ультразвуковыми преобразователями внутри сердца человека,
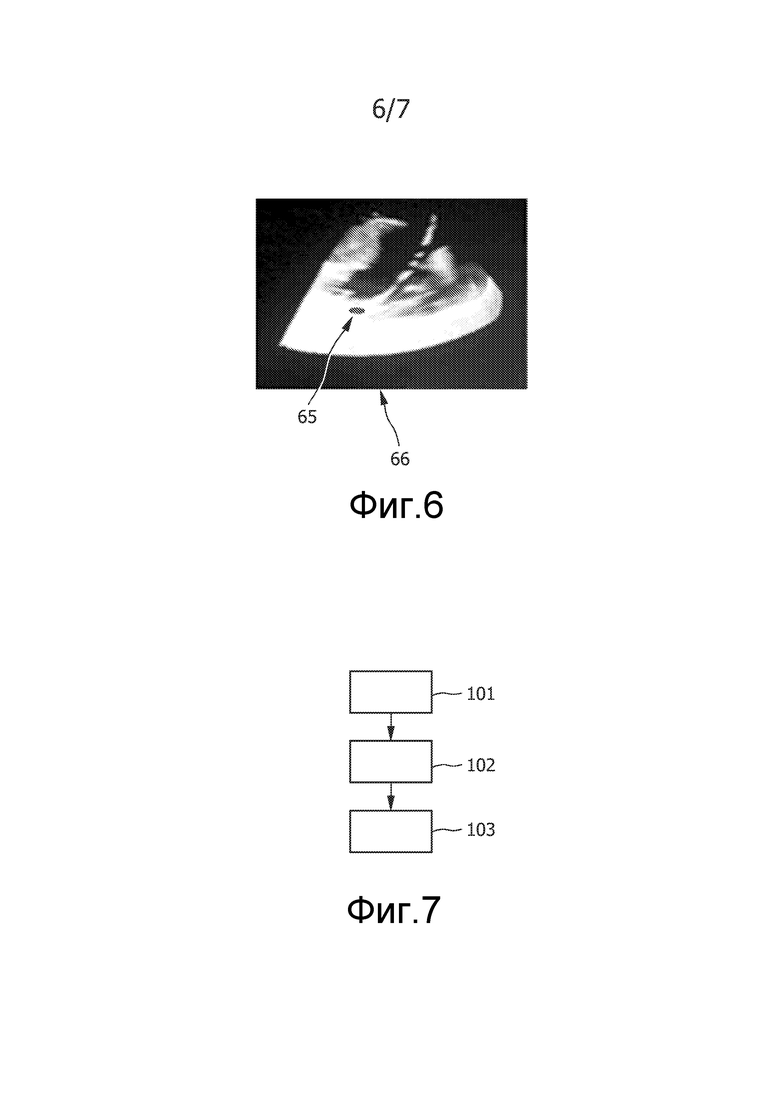
на фиг.6 представлено схематически и в качестве примера ультразвуковое изображение, с наложенным определяемым местоположением кончика катетера,
на фиг.7 представлена блок-схема, в качестве примера иллюстрирующая вариант осуществления способа определения местоположения для определения местоположения первого объекта внутри второго объекта, и
на фиг.8 представлена блок-схема, в качестве примера иллюстрирующая поток операций процесса применения аппарата для определения вещества.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
На фиг.1 представлен схематически и в качестве примера вариант осуществления аппарата определения местоположения для определения местоположения первого объекта 2 внутри второго объекта 3. Аппарат 1 определения местоположения содержит первый объект 2, который содержит первый ультразвуковой блок (не показан на фиг.1) и второй ультразвуковой блок 5, подлежащий расположению за пределами второго объекта 3, причем первый ультразвуковой блок и второй ультразвуковой блок 5 выполнены с возможностью передавать ультразвуковые сигналы между собой. Аппарат 1 определения местоположения дополнительно содержит блок 40 управления и обработки для управления аппаратом 1 определения местоположения и обработки ультразвуковой информации, принимаемой от первого и второго ультразвуковых блоков. В частности, блок 40 управления и обработки включает блок 6 определения местоположения для определения местоположения первого объекта 2 внутри второго объекта 3 на основе передаваемых ультразвуковых сигналов.
В этом варианте осуществления первый объект 2 представляет собой кончик катетера 20, который размещают внутри сердца 3, которое представляет собой второй объект человека 21. Человек 21 расположен на столе 22.
Кончик 2 катетера в качестве примера показан более подробно на фиг.2. Как можно видеть на фиг.2, кончик 2 катетера содержит несколько групп 7... 10 ультразвуковых преобразователей, образующих первый ультразвуковой блок. Ультразвуковые блоки расположены на поверхности кончика 2 катетера. Однако их также можно встраивать в кончик катетера и посылать и/или принимать ультразвуковые сигналы через отверстия в кончике катетера. В частности, кончик 2 катетера может содержать первую группу внутренних фронтальных ультразвуковых преобразователей 7, вторую группу ультразвуковых преобразователей 8, расположенных по кругу вокруг первой группы преобразователей, и третью группу преобразователей 9, расположенных на меньшем расстоянии от конца кончика 2 катетера, чем четвертая группа ультразвуковых преобразователей 10, имеющих большее расстояние до конца кончика 2 катетера, причем третья и четвертая группы преобразователей 9, 10 расположены на боковой поверхности кончика катетера 102. Несколько ультразвуковых преобразователей могут быть выполнены с возможностью для испускания ультразвука на той же частоте или на различных частотах. Например, ультразвуковые преобразователи одной и той же группы могут испускать ультразвуковые сигналы на одной и той же частоте, а ультразвуковые преобразователи различных групп могут испускать ультразвуковые сигналы на различных частотах, причем смежные частоты разделяют посредством по меньшей мере суммы половины полосы пропускания ультразвуковых преобразователей со смежными частотами. Несколько ультразвуковых преобразователей также могут быть выполнены с возможностью так, что каждый ультразвуковой преобразователь испускает ультразвук на отличающейся частоте.
Положения ультразвуковых преобразователей первого ультразвукового блока известны по отношению к кончику 2 катетера. Следовательно, блок 6 определения местоположения может быть выполнен с возможностью определять ориентацию кончика 2 катетера, основываясь на передаваемых ультразвуковых сигналах и положениях нескольких ультразвуковых преобразователей первого ультразвукового блока, которые известны по отношению к кончику 2 катетера. В частности, блок 6 определения местоположения может быть выполнен с возможностью определять первые положения, представляющие собой положения нескольких ультразвуковых преобразователей на кончике 2 катетера по отношению ко второму ультразвуковому блоку 5, и для того, чтобы определять ориентацию кончика 2 катетера по отношению ко второму ультразвуковому блоку 5, основываясь на определяемых первых положениях и вторых положениях, представляющих собой положения нескольких ультразвуковых преобразователей первого ультразвукового блока, которые известны по отношению к кончику 2 катетера. Следовательно, блок 6 определения местоположения может быть выполнен с возможностью определять не только положение, но также ориентацию кончика катетера 102.
Если второй ультразвуковой блок 5 принимает ультразвуковую волну, то можно определять, какой ультразвуковой преобразователь первого ультразвукового блока послал ультразвуковую волну по меньшей мере одним из следующих путей. Например, различные ультразвуковые преобразователи первого ультразвукового блока могут работать на различных частотах для того, чтобы позволять второму ультразвуковому блоку 5 определять, какой ультразвуковой преобразователь первого ультразвукового блока послал соответствующую ультразвуковую волну, основываясь на частоте ультразвуковой волны. Ультразвуковые преобразователи первого ультразвукового блока также могут работать последовательно во времени так, что только один ультразвуковой преобразователь первого ультразвукового блока активируют в один момент времени, чтобы определять, какой ультразвуковой преобразователь первого ультразвукового блока послал ультразвуковую волну, основываясь на моменте времени. Ультразвуковые преобразователи первого ультразвукового блока также могут работать на одной и той же частоте и одновременно, но с использованием различных паттернов активации. Паттерн активации определяет форму серии импульсов, в частности, число импульсов за цикл и/или расстояния между импульсами, причем форма серии импульсов может различаться для различных ультразвуковых преобразователей первого ультразвукового блока. Затем можно определять, какой ультразвуковой блок послал ту или иную принятую ультразвуковую волну в зависимости от соответствующей формы серии импульсов, например, посредством выполнения корреляционного анализа, который устанавливает корреляцию между принятыми ультразвуковыми волнами и известными паттернами активации различных ультразвуковых преобразователей первого ультразвукового блока.
Ультразвуковые преобразователи первого ультразвукового блока могут работать так, что ультразвуковые волны каждого отдельного ультразвукового преобразователя можно отличать от ультразвуковых волн других ультразвуковых преобразователей первого ультразвукового блока, или так, что ультразвуковые волны групп ультразвуковых преобразователей первого ультразвукового блока можно отличать от ультразвуковых волн других групп ультразвуковых преобразователей первого ультразвукового блока.
Второй ультразвуковой блок 5 содержит предпочтительно один или несколько двух- или трехмерных ультразвуковых преобразователей для приема ультразвуковых сигналов, испускаемых ультразвуковыми преобразователями, расположенными на кончике 2 катетера. В этом варианте осуществления второй ультразвуковой блок 5 содержит трехмерный TTE ультразвуковой преобразователь, который размещают на внешней части грудной клетки, в частности, располагают между ребрами человека 21. В других вариантах осуществления один или несколько двух- или трехмерных ультразвуковых преобразователей второго ультразвукового блока также могут иметь другую форму и/или размер. Например, второй ультразвуковой блок также может содержать трехмерный NOT ультразвуковой преобразователь, который в целом используют для трехмерной TTE. Второй ультразвуковой блок 5, содержащий трехмерный TTE ультразвуковой преобразователь, в качестве примера и схематически представлен на фиг.3.
На фиг.3 представлена грудная клетка человека 21 с ребрами 32. Трехмерный TTE ультразвуковой преобразователь 33 второго ультразвукового блока 5 помещают между ребрами 32, и он принимает ультразвуковые сигналы 34 от ультразвуковых преобразователей, расположенных на кончике 2 катетера на катетере 20, причем кончик 2 катетера расположен внутри сердца 3. На фиг.3 представлены необязательные дополнительные трехмерные TTE ультразвуковые преобразователи 30, 31 второго ультразвукового блока 5 штриховыми линиями, которые также можно размещать на грудной клетке человека 21 между ребрами 32. Также эти дополнительные необязательные ультразвуковые преобразователи 30, 31 можно использовать для приема ультразвуковых сигналов от ультразвуковых преобразователей на кончике 2 катетера, причем также эти принятые ультразвуковые сигналы можно использовать для определения местоположения кончика 2 катетера внутри сердца 3.
Блок 6 определения местоположения выполнен с возможностью определять местоположение кончика 2 катетера внутри сердца 3, основываясь по меньшей мере на одном из времени прохождения и направлении передачи передаваемых ультразвуковых сигналов, т.е. направлении, в котором ультразвуковые сигналы испускают и/или принимают. Например, положение кончика 2 катетера можно определять за счет времени прохождения и направленности нескольких преобразователей на кончике 2 катетера по отношению ко второму ультразвуковому блоку 5 за пределами сердца 3. В одном из вариантов осуществления трилатерацию и/или однонаправленное формирование пучка можно использовать для того, чтобы определять трехмерное положение и ориентацию кончика 2 катетера. Блок 6 определения местоположения также может быть выполнен с возможностью определять ориентацию кончика 2 катетера внутри сердца 3, основываясь на знании о том, от какой группы ультразвуковых преобразователей первого ультразвукового блока ультразвуковые волны могут быть приняты посредством второго ультразвукового блока в каких ориентациях, причем определение 106 местоположения может содержать базу данных, в которой хранят это знание. Например, если кончик 2 катетера находится в перпендикулярной ориентации по отношению ко второму ультразвуковому блоку, только ультразвуковые волны от ультразвуковых преобразователей первой и второй групп 7 и 8 можно принимать посредством второго ультразвукового блока. Таким образом, блок 6 определения местоположения может быть выполнен с возможностью определять, что кончик 2 катетера перпендикулярен по отношению ко второму ультразвуковому блоку, если только сигналы от первой и второй групп 7 и 8 принимают посредством второго ультразвукового блока. Кончик 2 катетера рассматривают как находящийся в перпендикулярной ориентации по отношению ко второму ультразвуковому блоку, если, например, первая и вторая группы 7 и 8 по существу направлены в направлении второго ультразвукового блока так, что ультразвуковые преобразователи третьей и четвертой групп 9 и 10 испускают ультразвуковые волны в направлении, по существу параллельном поверхности обнаружения второго ультразвукового блока.
Кончик 2 катетера содержит торцевой электрод 71 и кольцевой электрод 72. Торцевой электрод 71 содержит ультразвуковые преобразователи первого ультразвукового блока и необязательные отверстия 70. Отверстия 70 можно использовать, например, для целей орошения. Торцевой электрод 71 можно использовать в качестве абляционного электрода для абляции сердечной ткани посредством доставки РЧ энергии. Кольцевой электрод 72, а также торцевой электрод 71 также можно использовать в качестве воспринимающих электродов для снятия сигналов электрической активации. Сигналы электрической активации предпочтительно представляют собой электрокардиографические записи, которые могут представлять собой однополярные записи или биполярные записи между торцевым электродом 71 и кольцевым электродом 72. Таким образом, торцевой электрод 71 предпочтительно используют в качестве абляционного электрода и в качестве воспринимающего электрода, тогда как кольцевой электрод 72 предпочтительно используют только в качестве воспринимающего электрода. Воспринимающий электрод предпочтительно используют для снятия сигналов электрической активации в местоположении, которое определено посредством блока 6 определения местоположения.
Блок 40 управления и обработки дополнительно содержит блок определения карты 14 для определения электроанатомической карты на основе определяемых местоположений кончика 2 катетера внутри сердца 3 и сигналов электрической активации, измеряемых в определяемых местоположениях. Кончик 2 катетера можно перемещать в различные положения на стенке сердца, причем различные положения можно определять посредством блока 6 определения местоположения, и причем сигналы электрической активации можно измерять в этих местоположениях посредством воспринимающего электрода и использовать для того, чтобы генерировать электроанатомическую карту.
Абляционный электрод 71 предпочтительно используют для того, чтобы выполнять абляцию сердца в местоположении, которое определено посредством блока 6 определения местоположения, причем блок определения карты 14 предпочтительно выполнен с возможностью указывать на электроанатомической карте положения, в которых прикладывали энергию, в частности, в которых осуществляли абляцию сердечной ткани. Следовательно, карта представляет собой комбинированную карту, на которой показаны положения, в которых прикладывали энергию, и положения, в которых снимали сигналы электрической активации. Блок определения карты 14 дополнительно может быть выполнен с возможностью показывать положения, в которых планируют прикладывать энергию. Таким образом, сначала можно генерировать электроанатомическую карту. Затем пользователь может указывать положения на электроанатомической карте, которые следует подвергать абляции, основываясь на электрической активации, показанной на электроанатомической карте, причем кончик 2 катетера можно перемещать в положения, которые следует подвергать абляции. Перемещая в желаемое положение, местоположение кончика 2 катетера можно определять, в частности, в реальном времени. После выполнения процедуры абляции в определенном положении это положение можно помечать на электроанатомической карте как подвергшееся абляции положение.
Блок 40 управления и обработки дополнительно содержит блок определения глубины абляции 19 для определения глубины абляции на основе ультразвукового сигнала, получаемого от по меньшей мере одного из ультразвуковых преобразователей кончика 2 катетера. Таким образом, по меньшей мере один из ультразвуковых преобразователей кончика 2 катетера можно использовать для отправки ультразвуковых волн в сердечную ткань и для приема отраженных ультразвуковых волн из сердечной ткани для того, чтобы генерировать ультразвуковой сигнал, который может использовать блок определения глубины абляции 19 для определения глубины абляции, т.е. для определения границ повреждения между повреждением, создаваемым посредством процедуры абляции, и тканью, не подвергшейся абляции. Например, в одном из вариантов осуществления первую группу 7 ультразвуковых преобразователей, представленную на фиг.2, можно использовать для мониторинга глубины абляции, тогда как другие ультразвуковые преобразователи кончика катетера можно использовать для определения местоположения кончика 2 катетера. В другом варианте осуществления один и тот же ультразвуковой преобразователь можно использовать для мониторинга глубины абляции и для определения местоположения кончика 2 катетера, причем блок 40 управления и обработки можно переключать между первым режимом, в котором соответствующий ультразвуковой преобразователь используют для определения глубины абляции, и вторым режимом, в котором соответствующий ультразвуковой преобразователь используют для определения местоположения кончика 2 катетера. Определяемую глубину абляции можно показывать на дисплее 17. Например, соотношение подвергшейся абляции и не подвергшейся абляции сердечной ткани в направлении глубины внутри стенки сердца можно показывать пользователю на дисплее 17, и/или ультразвуковой сигнал, используемый для определения глубины абляции, который предпочтительно представляет собой изображение сердечной ткани в M-режиме, можно показывать на дисплее 17 вместе с индикацией, такой как линия, показывающая глубину абляции внутри сердечной ткани. Глубину абляции можно показывать в реальном времени на дисплее 17 для того, чтобы позволить пользователю управлять процедурой абляции, основываясь на определяемой глубине абляции. Дополнительные детали, касающиеся определения глубины абляции в зависимости от ультразвука, см. в WO 2010/082146 A1, которая включена в данный документ по ссылке.
Ультразвуковые преобразователи на кончике 2 катетера, которые используют для определения глубины абляции, предпочтительно имеют частоту в диапазоне от 20 МГц до 40 МГц. Кроме того, эти ультразвуковые преобразователи предпочтительно имеют относительно широкую полосу пропускания, которая, например, шире, чем 30%. Ультразвуковые преобразователи на кончике 2 катетера, которые используют для определения местоположения кончика катетера, предпочтительно имеют частоту в диапазоне от 1 до 10 МГц и относительно узкую полосу пропускания, например, 10% или уже.
Если ультразвуковой преобразователь, который расположен на кончике 2 катетера, используют для определения глубины абляции и для определения местоположения кончика катетера, соответствующий ультразвуковой преобразователь предпочтительно является настраиваемым, т.е. частоту соответствующего ультразвукового преобразователя предпочтительно можно изменять. В частности, соответствующим ультразвуковым преобразователем предпочтительно можно управлять так, что для определения местоположения кончика 2 катетера соответствующий ультразвуковой преобразователь работает на частоте, которая ниже, чем частота, используемая для мониторинга глубины абляции. Например, для определения местоположения кончика 2 катетера соответствующий ультразвуковой преобразователь работает на частоте в диапазоне от 1 до 10 МГц, и для определения глубины абляции соответствующий ультразвуковой преобразователь работает на частоте между 20 МГц и 40 МГц.
На фиг.4 представлена схематически и в качестве примера электроанатомическая карта 62. Электроанатомическая карта 62 содержит точки 61, которые указывают запланированные положения абляции. В примере, представленном на фиг.4, кончик 2 катетера 20 располагают в запланированном положении абляции для абляции сердечной ткани в этом положении. Необязательно дополнительный диагностический катетер 63 можно использовать для измерения локальных электрограмм. Однако этот дополнительный диагностический катетер не является необходимым и может быть опущен.
В одном из вариантов осуществления аппарат определения местоположения может содержать фиксирующее приспособление для фиксации второго ультразвукового блока на человеке 11, как схематически и в качестве примера показано на фиг.5.
На фиг.5 представлено схематически и в качестве примера поперечное сечение грудной клетки 11 с ребрами 32 и сердцем 3. Катетер 20 с кончиком 2 катетера введен в сердце 3. Кончик 2 катетера содержит первый ультразвуковой блок, причем ультразвуковые сигналы передают между первым ультразвуковым блоком и ультразвуковыми преобразователями 105, 110, размещенными на грудной клетке 11 человека 21. Ультразвуковые преобразователи 105, 110 в этом варианте осуществления формируют второй ультразвуковой блок 5, который фиксируют на грудной клетке 11 человека 21 с использованием фиксирующего приспособления, представляющего собой жилет 9.
В одном из вариантов осуществления блок 40 управления и обработки, в частности, подблок 13 управления блока 40 управления и обработки, может быть выполнен так, чтобы до определения местоположения кончика 2 катетера ультразвуковые преобразователи второго ультразвукового блока 5 работали для генерации ультразвуковых сигналов, показывая грудную клетку 11. Затем блок 40 управления и обработки может быть дополнительно выполнен с возможностью определять, какая часть ультразвуковых преобразователей приняла отраженную ультразвуковую волну от ребра 32, чтобы определять, какая часть ультразвуковых преобразователей размещена на ребре 32 грудной клетки 11. Затем во время определения местоположения кончика 2 катетера предпочтительно работают только части ультразвуковых преобразователей второго ультразвукового блока 5, которые не расположены на ребре 32 грудной клетки 11, т.е. используют только части ультразвуковых преобразователей второго ультразвукового блока 5, которые попадают между ребер.
Аппарат 1 определения местоположения дополнительно содержит блок определения положения второго ультразвукового блока 12 для определения положения второго ультразвукового блока 5 по отношению к опорной системе координат, причем блок 6 определения местоположения выполнен с возможностью определять положение кончика 2 катетера внутри сердца 3 по отношению к опорной системе координат, основываясь на передаваемых ультразвуковых сигналах и определяемом положении второго ультразвукового блока 5 по отношению к опорной системе координат. Это позволяет точно располагать кончик 2 катетера внутри сердца 3, даже если второй ультразвуковой блок 5, в частности, ультразвуковые преобразователи второго ультразвукового блока 5, меняет положение во время процедуры расположения.
Блок 12 определения положения осуществляет связь с датчиками положения на втором ультразвуковом блоке, в частности, на ультразвуковых преобразователях второго ультразвукового блока, которые схематически и в качестве примера показаны в вариантах осуществления, проиллюстрированных на фиг.3 и 5. На фиг.3 и 5 эти датчики положения обозначены 50... 54. Датчики положения 50... 54 представляют собой EM датчики, которые устанавливают связь с блоком определения положения второго ультразвукового блока 12 для определения трехмерного положения ультразвуковых преобразователей второго ультразвукового блока 5. В других вариантах осуществления другие датчики положения, такие как оптические датчики положения, можно использовать для определения трехмерного положения ультразвуковых преобразователей второго ультразвукового блока. Посредством определения положения ультразвуковых преобразователей второго ультразвукового блока по отношению к обыкновенной опорной системе координат, ультразвуковые преобразователи второго ультразвукового блока можно совмещать относительно друг друга. Это может вести к отверстию большего размера, состоящего из множества отверстий всех ультразвуковых преобразователей второго ультразвукового блока для осуществления слежения за кончиком катетера, в частности, для определения местоположения и ориентации кончика катетера, таким образом, достигая более высокой точности или, по меньшей мере, более высокой надежности слежения.
Блок 40 управления и обработки дополнительно содержит блок генерации ультразвукового изображения 15 для генерации ультразвукового изображения сердца 3 на основе ультразвуковой информации от второго ультразвукового блока 5, причем блок 6 определения местоположения может быть выполнен с возможностью определения местоположения кончика 2 катетера внутри сердца 3 по отношению к ультразвуковому изображению, на основе ультразвуковых сигналов, передаваемых между первым и вторым ультразвуковыми блоками, и ультразвуковой информации, принимаемой от второго ультразвукового блока 5.
Блок 40 управления и обработки дополнительно содержит совмещающий блок 16 для совмещения ультразвукового изображения с предварительно полученным изображением или моделью сердца 3, причем блок 6 определения местоположения выполнен с возможностью определять местоположение кончика 2 катетера внутри сердца 3, основываясь на определяемом местоположении по отношению к ультразвуковому изображению и результате совмещения. Ультразвуковое изображение сердца предпочтительно представляет собой получаемое в настоящее время трехмерное ультразвуковое изображение и предварительно полученное изображение предпочтительно представляет собой предварительно полученное трехмерное ультразвуковое изображение или трехмерное изображение в другой модальности визуализации, такое как компьютерно-томографическое изображение, магнитно-резонансное изображение и так далее. Модель предпочтительно также является трехмерной.
В частности, блок 6 определения местоположения может определить местоположение кончика 2 катетера внутри сердца 3 по отношению ко второму ультразвуковому блоку 5 в зависимости от ультразвуковых сигналов, передаваемых между первым ультразвуковым блоком, содержащемся в кончике 2 катетера, и вторым ультразвуковым блоком 5, с использованием, например, времени прохождения и направленности ультразвуковых блоков. Поскольку блок 6 определения местоположения определяет местоположение кончика 2 катетера по отношению ко второму ультразвуковому блоку 5 и поскольку второй ультразвуковой блок 5 также может быть выполнен с возможностью генерировать трехмерное изображение сердца 3, местоположение кончика 2 катетера внутри ультразвукового изображения сердца известно. Посредством совмещения этого ультразвукового изображения с предварительно полученным трехмерным изображением или трехмерной моделью местоположение кончика 2 катетера определяют по отношению к предварительно полученному изображению или модели.
Для того чтобы визуализировать местоположение кончика 2 катетера внутри сердца 3 по отношению к ультразвуковому изображению, основываясь на ультразвуковых сигналах, передаваемых между первым и вторым ультразвуковыми блоками, и информации ультразвуковой визуализации, принимаемой от второго ультразвукового блока 5, блок 6 определения местоположения может быть выполнен с возможностью генерировать изображение, показывающее только окрашенное или белое пятно, которое указывает местоположение кончика 2 катетера внутри сердца 3, определяемое с использованием ультразвуковых сигналов, передаваемых между первым и вторым ультразвуковыми блоками, на темном фоне и накладывать это яркое пятно на темный фон с ультразвуковым изображением, генерируемым посредством блока генерации ультразвукового изображения 15, основываясь на ультразвуковой визуализации, осуществляемой посредством второго ультразвукового блока 5. Соответствующее изображение с наложением схематически и в качестве примера показано на фиг.6. На фиг.6 окрашенное пятно 65, которое указывает местоположение кончика 2 катетера, показано наложенным на текущее ультразвуковое изображение 66.
Подблок 13 управления может быть выполнен с возможностью управлять катетером, в частности, воспринимающим и абляционным электродами и навигацией кончика катетера, и первым и вторым ультразвуковыми блоками. В частности, подблок 13 управления может быть выполнен с возможностью принимать ультразвуковую информацию для визуализации и для определения местоположения кончика 2 катетера внутри сердца 3 из первого и второго ультразвуковых блоков через информационное соединение 41, такое как электрическое и/или оптическое соединение, например, кабель, и для предоставления этой ультразвуковой информации, например, блоку 6 определения местоположения и блоку генерации ультразвукового изображения 15. Генерируемые изображения, такие как указанные изображения с наложением и/или электроанатомическая карта, можно показывать на дисплее 17.
Далее вариант осуществления способа определения местоположения в качестве примера описан со ссылкой на блок-схему, представленную на фиг.7.
На этапе 101 ультразвуковые сигналы передают между первым ультразвуковым блоком, расположенным на кончике 2 катетера, который вставлен в сердце 3 человека 21, и вторым ультразвуковым блоком 5, расположенным за пределами сердца 3 человека 21. Предпочтительно, второй ультразвуковой блок 5 размещают на грудной клетке человека 21. На этапе 102 определяют местоположение кончика 2 катетера внутри сердца 3, основываясь на ультразвуковых сигналах, передаваемых между первым и вторым ультразвуковыми блоками с использованием, например, времени прохождения и/или направленности ультразвуковых блоков. На этапе 103 определяемое местоположение кончика 2 катетера показывают на дисплее 17.
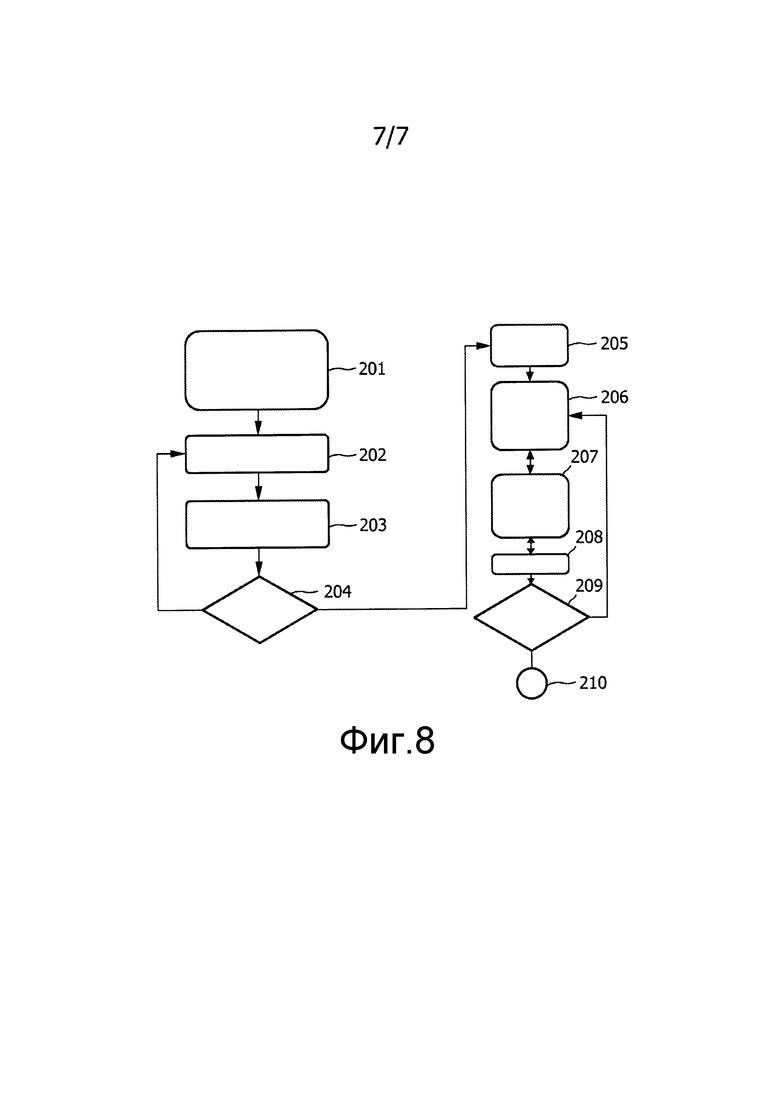
Далее в качестве примера описано предпочтительное использование аппарата 1 определения местоположения со ссылкой на поток операций, представленный на фиг.8.
На этапе 201 катетер 20 вставляют в сердце 3 человека 21 и на этапе 202 кончик катетера перемещают для того, чтобы коснуться поверхности сердца 3. На этапе 203 определяют текущее местоположение кончика 2 катетера, измеряют электрическую активность в определяемом местоположении и генерируют трехмерное ультразвуковое изображение с использованием второго ультразвукового блока 5. Определяемое местоположение кончика 2 катетера, измеряемую электрическую активность и трехмерное ультразвуковое изображение сохраняют. На этапе 204 принимают, например, с помощью пользователя, решение о том, следует ли измерять электрическую активность в дополнительном местоположении или нет. Если электрическую активность следует измерять в дополнительном местоположении, кончик катетера перемещают в другое положение на поверхности сердца 3 (этап 202), и поток операций продолжается в этом новом положении на этапе 203. Если принято решение остановить повторение этапов с 202 до 204, сохраненные местоположения и измеренные электрические активности используют для генерации электроанатомической карты сердца 3, и на этапе 205, основываясь на электроанатомической карте, выполняют планирование точек абляции, в которых сердце 3 следует подвергать абляции.
На этапе 206 кончик катетера перемещают в желаемое запланированное положение абляции, тогда как во время движения блок 6 определения местоположения определяет положение кончика 2 катетера на получаемом в настоящее время трехмерном ультразвуковом изображении (этап 207). Если желаемое местоположение достигнуто, выполняют абляцию сердечной ткани в этом местоположении на этапе 208. Также во время процедуры абляции местоположение кончика 2 катетера можно определять и показывать на получаемом в настоящее время трехмерном ультразвуковом изображении на дисплее 17. Кроме того, в то время как прикладывают абляционную энергию, глубину абляции можно определять в реальном времени для управления процедурой абляции в зависимости от определяемой глубины абляции. На этапе 209 проверяют, все ли желаемые точки подверглись абляции. Если нет, то поток операций продолжается на этапе 206. Если все точки подверглись абляции, поток операций заканчивается на этапе 210.
На этапе 205 также можно планировать точки абляции, в которых сердце 3 следует подвергать абляции, основываясь на трехмерном ультразвуковом изображении сердца 3, которое только предоставляет анатомическую информацию. Например, если желательна изоляция легочных вен, можно планировать соответствующие точки абляции, основываясь на анатомической информации, предоставляемой посредством трехмерного ультразвукового изображения. Вдобавок или альтернативно, например, можно запланировать места ранней активации, основываясь на электроанатомической карте.
На этапе 203 генерация трехмерного ультразвукового изображения и сохранение сгенерированного трехмерного ультразвукового изображения являются необязательными, т.е. на этапах с 202 до 204 электроанатомическую карту также можно определять без генерации и сохранения трехмерного ультразвукового изображения.
Во время осуществления потока операций соответствующее местоположение кончика 2 катетера, которое определено на основе ультразвуковых сигналов, передаваемых между первым и вторым ультразвуковыми блоками, можно показывать на получаемом в настоящее время трехмерном ультразвуковом изображении и/или на предварительно полученном трехмерном изображении, которые могут представлять собой ультразвуковое изображение или изображение в другой модальности визуализации. Определяемое местоположение кончика 2 катетера также можно показывать на модели сердца 3. Для того чтобы показать определяемое местоположение кончика 2 катетера на предварительно полученном трехмерном изображении или на модели сердца 3, в настоящее время получаемое трехмерное ультразвуковое изображение предпочтительно совмещают с предварительно полученным изображением и/или моделью, как описано выше. Совмещение можно осуществлять с использованием, например, известных способов сегментации, которые выполняют, например, с помощью EP Navigator компании Philips. Кроме того, положение второго ультразвукового блока, предоставляемое посредством блока 12 определения положения второго ультразвукового блока, можно использовать для совмещения получаемого в настоящее время трехмерного ультразвукового изображения с предварительно получаемым изображением и/или моделью. В частности, поскольку известны ориентация и положение получаемого в настоящее время трехмерного ультразвукового изображения по отношению ко второму ультразвуковому блоку, поскольку, например, трехмерное ультразвуковое изображение получено с использованием второго ультразвукового блока, и зная трехмерное положение второго ультразвукового блока по отношению к опорной системе координат, в которой также известно положение предварительно получаемого изображения и/или модели, получаемое в настоящее время трехмерное ультразвуковое изображение можно совмещать с предварительно получаемым изображением и/или моделью. Блок определения положения второго ультразвукового блока использует, например, слежение на электромагнитной или оптоволоконной основе, чтобы определять положение второго ультразвукового блока по отношению к опорной системе координат. Слежение на оптоволоконной основе может быть основано, например, на рэлеевском рассеянии или волокнах со встроенными брэгговскими решетками.
Аппарат и способ определения местоположения предпочтительно выполнены с возможностью осуществлять картирование сердца, причем временные и пространственные распределения электрических потенциалов миокарда идентифицируют во время конкретного ритма сердца. В частности, аппарат и способ определения местоположения может быть выполнен с возможностью осуществлять электроанатомическое картирование (EAM), причем трехмерное местоположение картирующего катетера можно определять с использованием локальных электрокардиограмм для того, чтобы реконструировать в реальном времени представление трехмерной геометрии камеры сердца с цветовым кодированием значимой электрофизиологической информации. Реконструкцию представления трехмерной геометрии камеры сердца можно достичь посредством выбора анатомической структуры, предоставляемой посредством трехмерного ультразвукового изображения, получаемого в реальном времени. Вдобавок аппарат и способ определения местоположения может быть выполнен с возможностью прикреплять анатомические метки и повреждения абляцией для того, чтобы содействовать картированию и абляции. Предпочтительно, они позволяют надежно располагать катетер без флуороскопии. Генерируемую EAM можно использовать, например, для того, чтобы содействовать изоляции легочной вены для лечения фибрилляции предсердий.
Несмотря на то, что в описанных выше вариантах осуществления второй объект представляет собой сердце человека, в других вариантах осуществления второй объект также может представлять собой другой объект, например, другую часть человека или животного, например, другой орган или кровеносный сосуд. Второй объект также может представлять собой технический объект.
Несмотря на то, что в описанных выше вариантах осуществления определяют электроанатомическую карту сердца, в других вариантах осуществления восприятие свойств второго объекта, в частности, измерение электрической активности сердца в других местоположениях, может не присутствовать. Например, кончик катетера можно просто перемещать в различные положения внутри сердца, в которых кончик катетера касается стенки сердца, и в этих положениях трехмерные местоположения кончика катетера можно определять для генерации анатомической карты, которая не содержит, например, электрическую информацию. Анатомическую карту можно использовать, например, для чисто анатомической абляции, такой как лечение пароксизмальной фибрилляции предсердий.
Несмотря на то, что в описанных выше вариантах осуществления кончик катетера выполнен с возможностью прикладывать электрическую энергию, в частности, РЧ энергию, к сердечной ткани, кончик катетера также может быть выполнен с возможностью прикладывать другие виды абляционной энергии к сердечной ткани, такие как оптическая энергия, предоставляемая посредством лазера через оптические волокна, расположенные внутри катетера.
Несмотря на то, что в описанных выше вариантах осуществления катетеры с определенными кончиками катетера описаны в качестве примера, катетер также может содержать кончик катетера другого типа, такой как кончик катетера для многоточечной абляции или баллонный кончик катетера.
Генерируемую электроанатомическую карту можно совмещать с живыми флуороскопическими и/или предпроцедурными данными, таким как компьютерно-томографические или магнитно-резонансные изображения с использованием способов сегментации. Другая возможность совмещать электроанатомическую карту с живыми флуороскопическими и/или предпроцедурными данными состоит в использовании датчика положения, который можно прикреплять ко второму ультразвуковому блоку, как описано выше.
Аппарат и способ определения местоположения предпочтительно выполнены с возможностью использования в приложениях для лечения сердечной аритмии и/или других приложениях, в частности, в приложениях, в которых осуществляют навигацию на основе чисто анатомической карты или электроанатомической карты.
Несмотря на то, что в описанных выше вариантах осуществления первый объект предпочтительно представляет собой кончик катетера, в других вариантах осуществления первый объект также может представлять собой другой объект, в частности, другое устройство в теле, такое как игла.
Другие вариации раскрытых вариантов осуществления могут понять и осуществить специалисты в данной области при практическом выполнении описываемого в заявке изобретения, изучив рисунки, раскрытие и приложенную формулу изобретения.
В формуле изобретения слово «содержит» не исключает другие элементы или этапы, а формы единственного числа не исключают множественного.
Один блок или устройство может выполнять функции нескольких элементов, перечисленных в формуле изобретения. Сам факт того, что определенные меры перечислены во взаимно различных зависимых пунктах формулы изобретения, не указывает на то, что комбинация этих мер не может быть использована с пользой.
Вычисления, такие как определение местоположения первого объекта и определение глубины абляции, а также управление частями аппарата определения местоположения или всего аппарата определения местоположения, осуществляемые посредством одного или нескольких блоков или устройств, можно осуществлять посредством какого-либо другого числа блоков или устройств. Вычисления и/или управление частями аппарата определения местоположения или всего аппарата определения местоположения в соответствии со способом определения местоположения можно реализовать в виде средства программного кода компьютерной программы и/или в виде специализированного аппаратного обеспечения.
Компьютерную программу можно хранить/распространять на подходящем носителе, таком как оптический запоминающий носитель или твердотельный носитель, поставляемый вместе с или в виде части другого аппаратного обеспечения, но также можно распространять в других формах, например, через Интернет или другие проводные или беспроводные телекоммуникационные системы.
Любые ссылочные позиции в формуле изобретения не следует толковать в качестве ограничения объема.
Изобретение относится к аппарату определения местоположения для определения местоположения первого объекта, такого как катетер, внутри второго объекта, например, представляющего собой сердце человека. Первый объект содержит первый ультразвуковой блок, а второй ультразвуковой блок располагают за пределами второго объекта. Блок определения местоположения определяет местоположение первого объекта внутри второго объекта, основываясь на ультразвуковых сигналах, передаваемых между первым ультразвуковым блоком и вторым ультразвуковым блоком. Это делает возможным надежное определение местоположения первого объекта внутри второго объекта таким путем, который представляет собой альтернативу использованию передачи электрических сигналов для определения местоположения, и это может вести к повышенной точности определения местоположения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ВИЗУАЛИЗАЦИИ | 2010 |
|
RU2540090C2 |
| ЭНЕРГОПОДАЮЩЕЕ УСТРОЙСТВО ДЛЯ ПОДАЧИ ЭНЕРГИИ К ОБЪЕКТУ | 2011 |
|
RU2572748C2 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ СВОЙСТВ ДЛЯ ОПРЕДЕЛЕНИЯ СВОЙСТВА ОБЪЕКТА | 2011 |
|
RU2567268C2 |
| КАТЕТЕР ДЛЯ КАРТРИРОВАНИЯ ПИЩЕВОДА | 2007 |
|
RU2417732C2 |
| УСТРОЙСТВО ПОДАЧИ ЭНЕРГИИ | 2013 |
|
RU2669745C2 |
| СИСТЕМА И СПОСОБ КАРТОГРАФИРОВАНИЯ ДЛЯ МЕДИЦИНСКИХ ПРОЦЕДУР | 2011 |
|
RU2577760C2 |
| МЕДИЦИНСКОЕ УЛЬТРАЗВУКОВОЕ УСТРОЙСТВО С ОПРЕДЕЛЕНИЕМ УСИЛИЯ | 2010 |
|
RU2556975C2 |
| УСТРОЙСТВО, СПОСОБ И КОМПЬЮТЕРНАЯ ПРОГРАММА ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК СЕРДЦА | 2010 |
|
RU2539010C2 |
| ТРЕХМЕРНОЕ ПРЕДСТАВЛЕНИЕ ЭЛЕКТРИЧЕСКОЙ АКТИВНОСТИ | 2020 |
|
RU2758748C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ДЛЯ ОБНАРУЖЕНИЯ ОБЪЕКТА | 2011 |
|
RU2594809C2 |
Группа изобретений относится к медицинской технике, а именно к средствам определения местоположения объектов внутри тела. Аппарат определения местоположения первого объекта внутри второго объекта содержит первый объект, включающий первый ультразвуковой блок, второй ультразвуковой блок, расположенный за пределами второго объекта, причем первый ультразвуковой блок и второй ультразвуковой блок выполнены с возможностью передавать ультразвуковые сигналы между собой, блок генерации ультразвукового изображения второго объекта на основе ультразвуковой информации по меньшей мере от одного из первого ультразвукового блока и второго ультразвукового блока, блок определения местоположения первого объекта внутри второго объекта по отношению к ультразвуковому изображению на основе ультразвуковых сигналов, передаваемых между первым и вторым ультразвуковыми блоками, и ультразвуковой информации по меньшей мере от одного из первого ультразвукового блока и второго ультразвукового блока. Способ определения местоположения осуществляют посредством аппарата определения местоположения с использованием компьютерно-читаемого носителя. Использование изобретений позволяет более надежно определять местоположение первого объекта внутри второго объекта и повысить точность определения местоположения. 3 н. и 9 з.п. ф-лы, 8 ил. 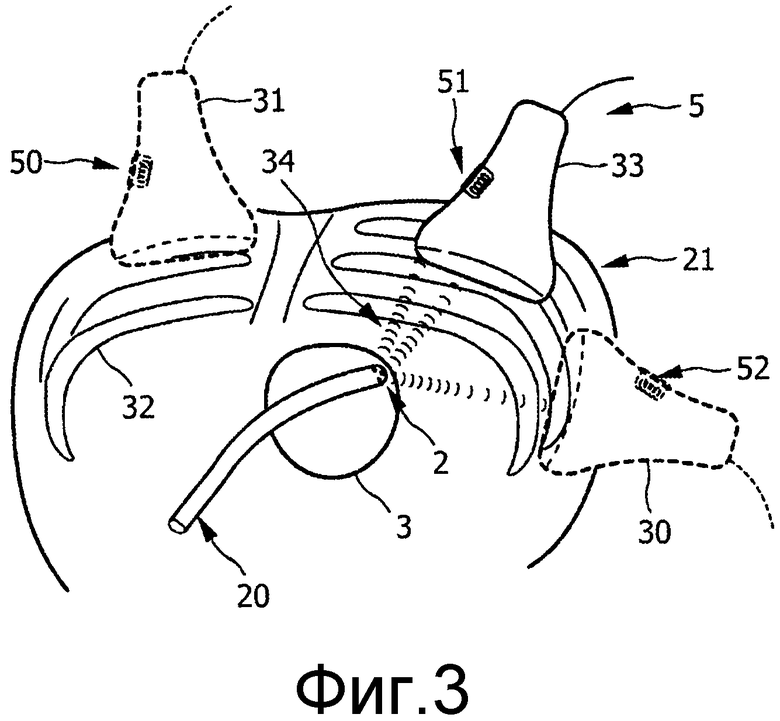
1. Аппарат определения местоположения для определения местоположения первого объекта (2) внутри второго объекта (3), причем аппарат (1) определения местоположения содержит:
первый объект (2), содержащий первый ультразвуковой блок,
второй ультразвуковой блок (5), подлежащий расположению за пределами второго объекта (3), причем первый ультразвуковой блок и второй ультразвуковой блок (5) выполнены с возможностью передавать ультразвуковые сигналы между собой,
блок (15) генерации ультразвукового изображения для генерации ультразвукового изображения второго объекта (3) на основе ультразвуковой информации по меньшей мере от одного из первого ультразвукового блока (7…10) и второго ультразвукового блока (5; 105, 110),
блок (6) определения местоположения для определения местоположения первого объекта (2) внутри второго объекта (3) по отношению к ультразвуковому изображению на основе ультразвуковых сигналов, передаваемых между первым и вторым ультразвуковыми блоками, и ультразвуковой информации по меньшей мере от одного из первого ультразвукового блока и второго ультразвукового блока.
2. Аппарат определения местоположения по п. 1, в котором по меньшей мере один из первого ультразвукового блока и второго ультразвукового блока (5) содержит несколько ультразвуковых преобразователей (7…10) для передачи ультразвуковых сигналов между первым и вторым ультразвуковыми блоками, причем упомянутые несколько ультразвуковых преобразователей (7…10) испускают ультразвуковые сигналы на одной и той же или различных частотах.
3. Аппарат определения местоположения по п. 2, в котором первый ультразвуковой блок содержит несколько ультразвуковых преобразователей (7…10), размещенных в положениях на или внутри первого объекта, которые известны по отношению к первому объекту (2), причем упомянутые несколько ультразвуковых преобразователей (7…10) испускают или принимают ультразвуковые сигналы на различных частотах для передачи ультразвуковых сигналов между упомянутыми несколькими ультразвуковыми преобразователями (7…10) и вторым ультразвуковым блоком (5) на различных частотах, и причем блок (6) определения местоположения выполнен с возможностью определять ориентацию первого объекта (2), основываясь на передаваемых ультразвуковых сигналах и положениях упомянутых нескольких ультразвуковых преобразователей (7…10), которые известны по отношению к первому объекту (2).
4. Аппарат определения местоположения по п. 1, в котором блок (6) определения местоположения выполнен с возможностью определять местоположение первого объекта внутри второго объекта, основываясь по меньшей мере на одном из времени прохождения и направления передачи передаваемых ультразвуковых сигналов.
5. Аппарат определения местоположения по п. 1, в котором первый объект (2) выполнен с возможностью измерять свойство второго объекта (3) в местоположении, в котором первый объект (2) размещен внутри второго объекта.
6. Аппарат определения местоположения по п. 5, причем аппарат (1) определения местоположения дополнительно содержит блок (14) определения карты для определения карты свойств на основе определенных местоположений первого объекта (2) внутри второго объекта (3) и свойств второго объекта (3), которые измерены в определенных местоположениях.
7. Аппарат определения местоположения по п. 1, в котором первый объект (2) выполнен с возможностью подавать энергию на второй объект (3) в местоположении, в котором первый объект (2) размещен внутри второго объекта (3).
8. Аппарат определения местоположения по п. 1, причем аппарат определения местоположения дополнительно содержит фиксирующее приспособление (9) для фиксации второго ультразвукового блока (105, 110) на субъекте (11), в котором расположен второй объект (3).
9. Аппарат определения местоположения по п. 1, причем аппарат определения местоположения дополнительно содержит блок (12) определения положения второго ультразвукового блока для определения положения второго ультразвукового блока (5; 105, 110) по отношению к опорной системе координат, причем блок (6) определения местоположения выполнен с возможностью определять положение первого объекта (2) внутри второго объекта (3) по отношению к опорной системе координат, основываясь на передаваемых ультразвуковых сигналах и определенном положении второго ультразвукового блока (5; 105, 110) по отношению к опорной системе координат.
10. Аппарат определения местоположения по п. 1, причем аппарат (1) определения местоположения дополнительно содержит совмещающий блок (16) для совмещения ультразвукового изображения с предварительно полученным изображением или моделью второго объекта (3), и причем блок (6) определения местоположения выполнен с возможностью определять местоположение первого объекта (2) внутри второго объекта (3), основываясь на определенном местоположении по отношению к ультразвуковому изображению и результату совмещения.
11. Способ определения местоположения для определения местоположения первого объекта (2) внутри второго объекта (3), причем способ определения местоположения содержит этапы, на которых:
передают ультразвуковые сигналы между первым ультразвуковым блоком, который содержится в первом объекте (2), и вторым ультразвуковым блоком (5), расположенным за пределами второго объекта (3),
генерируют ультразвуковое изображение второго объекта (3), основываясь на ультразвуковой информации по меньшей мере от одного из первого ультразвукового блока (7…10) и второго ультразвукового блока (5; 105, 110), посредством блока (15) генерации ультразвукового изображения, и
определяют местоположение первого объекта (2) внутри второго объекта (3) по отношению к ультразвуковому изображению, основываясь на ультразвуковых сигналах, передаваемых между первым и вторым ультразвуковыми блоками, и ультразвуковой информации по меньшей мере от одного из первого ультразвукового блока и второго ультразвукового блока, посредством блока (6) определения местоположения.
12. Компьютерно-читаемый носитель, содержащий сохраненную на нем компьютерную программу определения местоположения для определения местоположения первого объекта внутри второго объекта, причем компьютерная программа определения местоположения содержит средства программного кода для предписания аппарату определения местоположения по п. 1 осуществлять этапы способа определения местоположения по п. 11, когда компьютерная программа определения местоположения запущена на компьютере, управляющем аппаратом определения местоположения.
| US 2002107445 A1, 08.08.2002 | |||
| US 2003093067 A1, 15.05.2003 | |||
| US 7575550 B1, 18.08.2009 | |||
| US 5515853 A, 14.05.1996 | |||
| Способ калибровки зубчатых колес | 1986 |
|
SU1362553A1 |
| US 2006253032 A1, 09.11.2006 | |||
| ПОВЫШЕНИЕ КАЧЕСТВА ИНТРАВАСКУЛЯРНОГО УЛЬТРАЗВУКОВОГО ИЗОБРАЖЕНИЯ И ОБРАБОТКИ СИГНАЛОВ | 1998 |
|
RU2238041C2 |

