Изобретение многовинтовой беспилотный летательный аппарат вертикального взлета и посадки (далее летательный аппарат) относится к авиации и работает на возобновляемых источниках энергии, в частности на энергии Солнца и ветра. Летательный аппарат предназначен: для ближнего и загоризонтного мониторинга окружающей среды, ведения радиотехнической, радиационной, оптико-электронной, химической и метеорологической разведки; приема и передачи радиосигналов; поиска пропавших объектов и людей; мониторинга автотранспортных и железнодорожных магистралей, морских и речных портов, газовых и нефтяных трубопроводов, опорных линий электропередач; выполнения различных сельскохозяйственных работ и других задач в интересах МО, МЧС и почты России. Основными проблемами при создании многовинтовых беспилотных летательных аппаратов вертикального взлета и посадки являются: создание надлежащих условий для надежного функционирования летательного аппарата по назначению; уменьшение возмущающих факторов на полетные характеристики; снижение вибрационного и шумового воздействия на оптическую, радиоэлектронную и другую аппаратуру целевого назначения; исключение влияние углов наклона летательного аппарата на искажение результатов фото и видеосъемки. Известен летательный аппарат вертикального взлета, патент США №3889902, кл. 244-17.23.1975 [1], выполненный по многовинтовой схеме, в котором для создания горизонтальной тяги в режиме горизонтального полета используется реактивный двигатель, а воздушные винты вертикальной тяги приводятся во вращательное движение с помощью газотурбинных двигателей, к которым газ подводится по системе трубопроводов от центрального распределительного устройства. Недостатком этого летательного аппарата является сложная система дистанционного управления, а также низкая экономичность и громоздкость конструкции реактивных и газотурбинных двигателей. Практическая эксплуатация летательного аппарата требует специально обученного обслуживающего персонала. Известен летательный аппарат вертикального взлета, заявка на изобретение WO 2006048205 А1, РСТ/ЕР 05/011589, 28.10.2005 [2], содержащий крестообразную раму, на концах которой установлены силовые установки с несущими винтами, в центре расположена аппаратура для целевого применения, причем эта аппаратура расположена ниже центра тяжести летательного аппарата. В данном техническом решении недостатками являются: использование принципа жесткой установки целевой нагрузки, поле зрения которой следует траектории полета аппарата при выполнении им всех эволюции и тот факт, что вибрации и шумы от работы силовых установок передаются целевой нагрузке, вызывая искажение съемки местности. Известен многовинтовой летательный аппарат с вертикальным взлетом, патент RU 2001836 С1, В64С 27/08 [3], который относится к летательным аппаратам тяжелее воздуха, содержащий фюзеляж в виде силовой рамы, двигатель внутреннего сгорания, не менее шести вертикально расположенных электродвигателей с винтами в кожухах, электрогенератор, разъемную муфту, вал и несущую поверхность аэродинамической формы крыла. Основным недостатком данного изобретения является наличие двигателя внутреннего сгорания, что делает конструкцию тяжелой, сложной в изготовлении и эксплуатации. Известно изобретение RU 2511735 C1, В64С 29/00 [4], Беспилотный летательный аппарат вертикального взлета и посадки, содержащий корпус выпуклой формы, выполненный в виде сжатого десятиугольника в плане, силовой элемент, размещенный в центре корпуса, на верхней части которого расположены два вентилятора, интегрированный обтекатель с кольцевыми каналами, элементы управления, причем расстояние между осями вращения вентиляторов составляет не менее суммы двух радиусов вращения. Корпус и интегрированный обтекатель беспилотного летательного аппарата вертикального взлета и посадки могут быть выполнены из вспененной пластмассы, а элементы управления расположены по всей внешней нижней боковой поверхности корпуса. Известно изобретение заявка DE №102005046155, МПК В64С 27/82, 27/10 [5], Малогабаритный беспилотный летательный аппарат (МБЛА ВВП) с движителем, состоящим из двух соосных воздушных винтов противоположного вращения, и электродвигателем в качестве силового агрегата, расположенного в центральном контейнере, и тремя рулевыми органами, представляющими собой миниатюрные винтомоторные группы с воздушными винтами малого диаметра, закрепленными равноудалено от центрального контейнера на радиальных балках под углом 120 градусов. Недостатком данного изобретения является сложность конструкции двух соосных воздушных винтов противоположного вращения, а также наличие другой конструкции в виде дополнительных трех рулевых миниатюрных винтомоторных групп с воздушными винтами малого диаметра, закрепленными равноудалено от центрального контейнера на радиальных балках под углом 120 градусов. Также следует отметить отсутствие устройств ориентации в пространстве, заявленного МБЛА ВВП. Наиболее близким по техническому решению к заявленному изобретению по совокупности существенных признаков является Многовинтовой летательный аппарат вертикального взлета и посадки, заявка на изобретение WO 2006048205 A1, РСТ/ЕР 05/011589, 28.10.2005 [2]. Технический результат, достигаемый при использовании заявленного изобретения, заключается в создании такой конструкции летательного аппарата вертикального взлета и посадки, при которой: максимально была использована энергия ветра и Солнца в целях обеспечения длительности полета; защита целевой аппаратуры от вибрационных нагрузок работающих подъемно-маршевых электродвигателей; создание посадочного шасси, амортизирующее ударную нагрузку при посадке летательного аппарата; защита подъемно-маршевых электродвигателей от повреждений при опрокидывании летательного аппарата во время посадки; обеспечение качества видеосъемки независимо от угла крена летательного аппарата. Указанный технический результат достигается следующим образом:
- применяется герметичная полусфера, выполненная из непроницаемой оболочки заполненной инертным газом Гелием, причем полусфера жестко соединена с несущей круговой многолучевой рамой;
- на всей внешней поверхности полусферы и малой полусферы размещена пленочная солнечная батарея;
- в центре нижней плоскости герметичной полусферы, в полости малой полусферы располагаются шаровой маятниковый подвес, стержень маятникового подвеса, подвижная тонкая углепластиковая сферическая пластина, закрепленная в конце маятникового подвеса, LI-PO аккумуляторные батареи, размещенные в специальных контейнерах;
- в центре верхней части снаружи герметичной полусферы располагается датчик угла крена;
- на концах лучей несущей круговой многолучевой углепластиковой рамы размещены подъемно-маршевые электродвигатели, причем на концах лучей несущей круговой многолучевой углепластиковой рамы установлены защитные углепластиковые дуги;
- подъемно-маршевые электродвигатели имеют ребристые рубашки охлаждения, обеспечивающие их защиту от перегрева;
- на подвижной тонкой углепластиковой сферической пластине установлена видео- или другая целевая аппаратура и материалы, кроме того, подвижная тонкая сферическая пластина выполняет защитную функцию от воздействия окружающей среды на приборы и материалы, расположенные внутри малой сферической полости;
- применены опорные углепластиковые стержни, которые одним концом соединены с помощью цилиндрических шарниров с концами упругих дуг лыжеобразных шасси, другой конец этих стержней жестко закреплен на несущей круговой многолучевой углепластиковой раме;
- установлены две поперечные углепластиковые дуги, соединяющие две части лыжеобразных шасси.
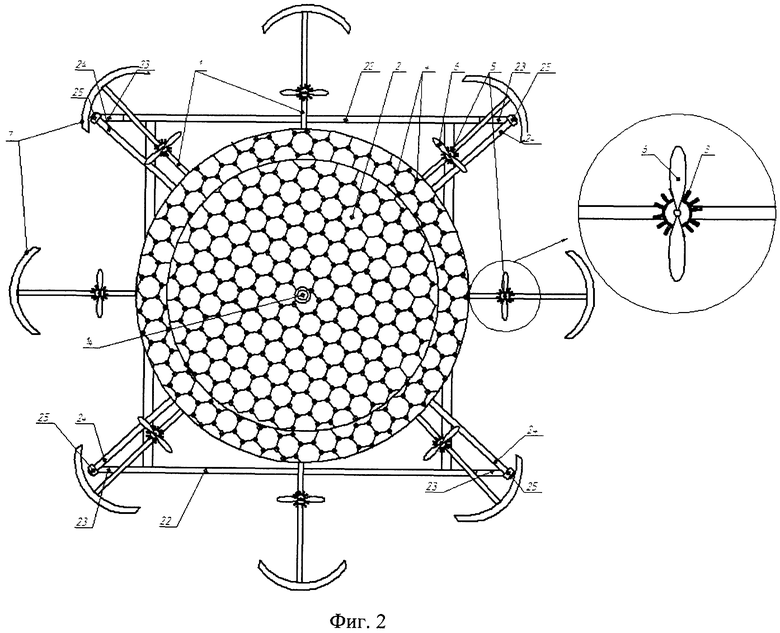
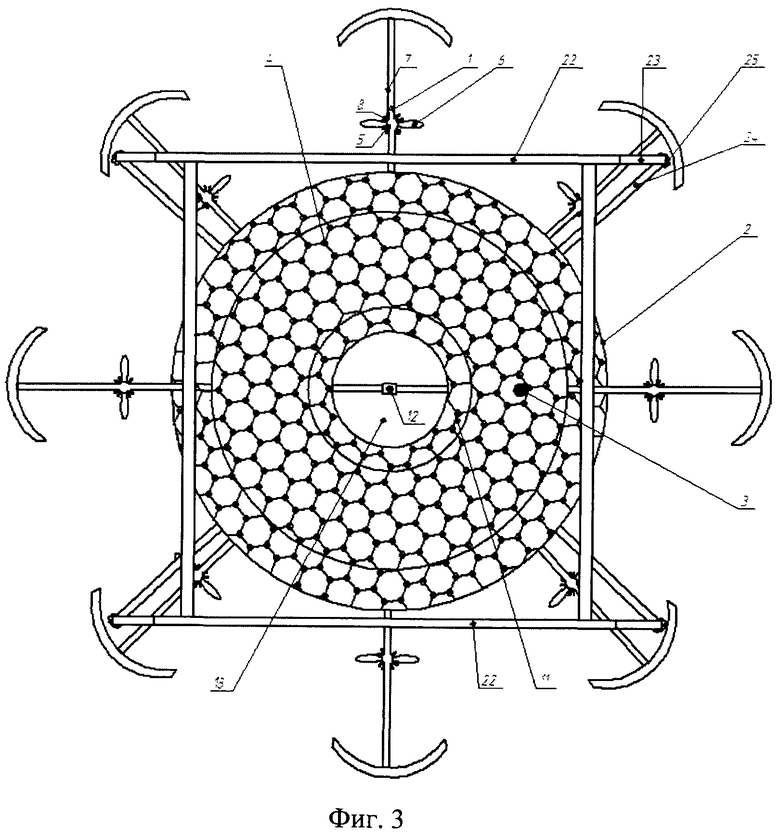
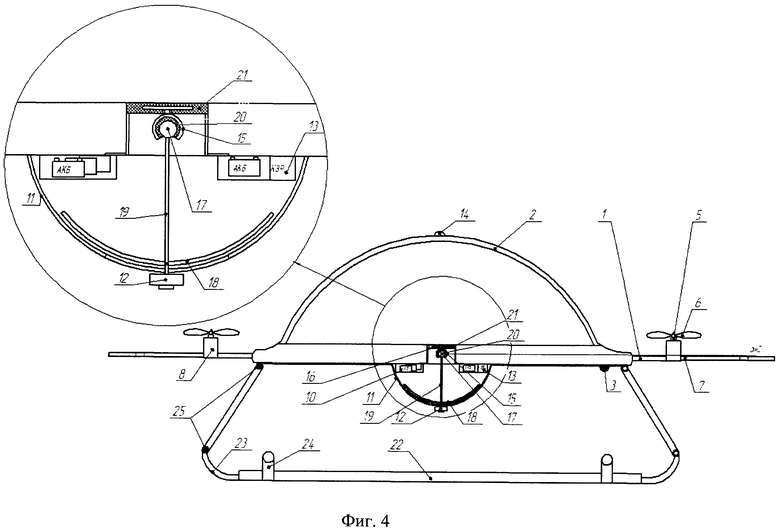
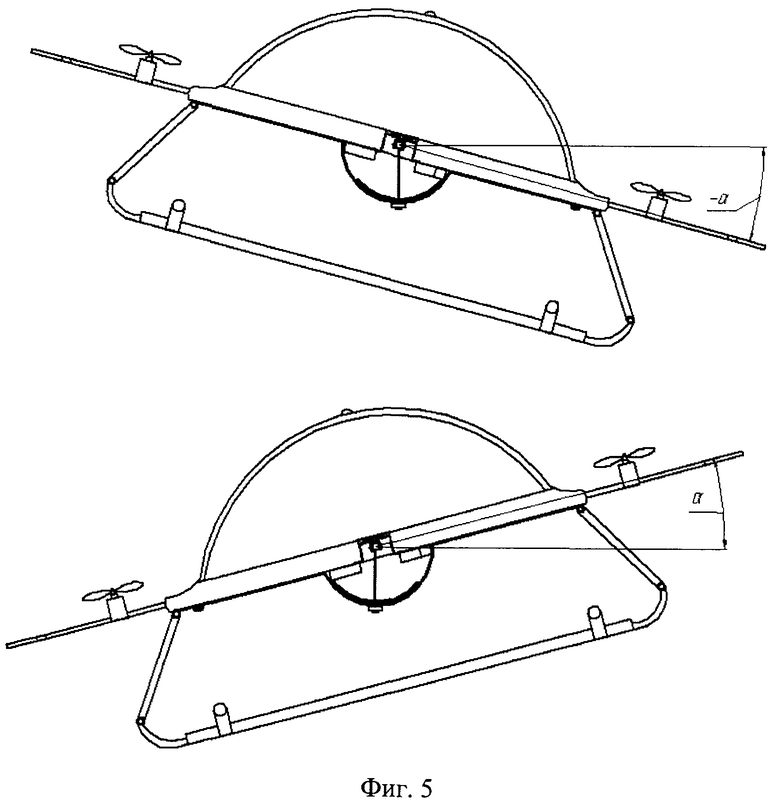
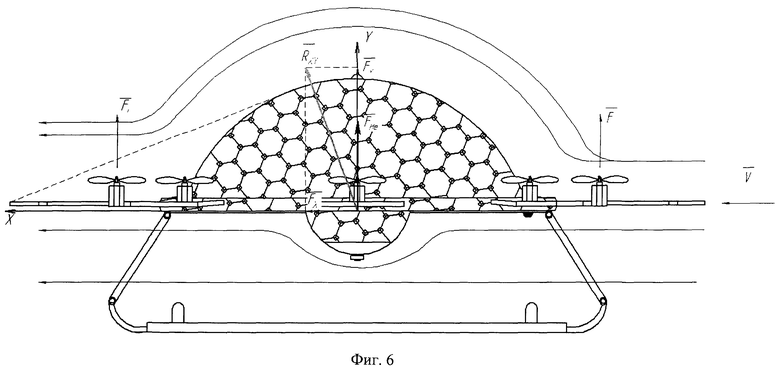
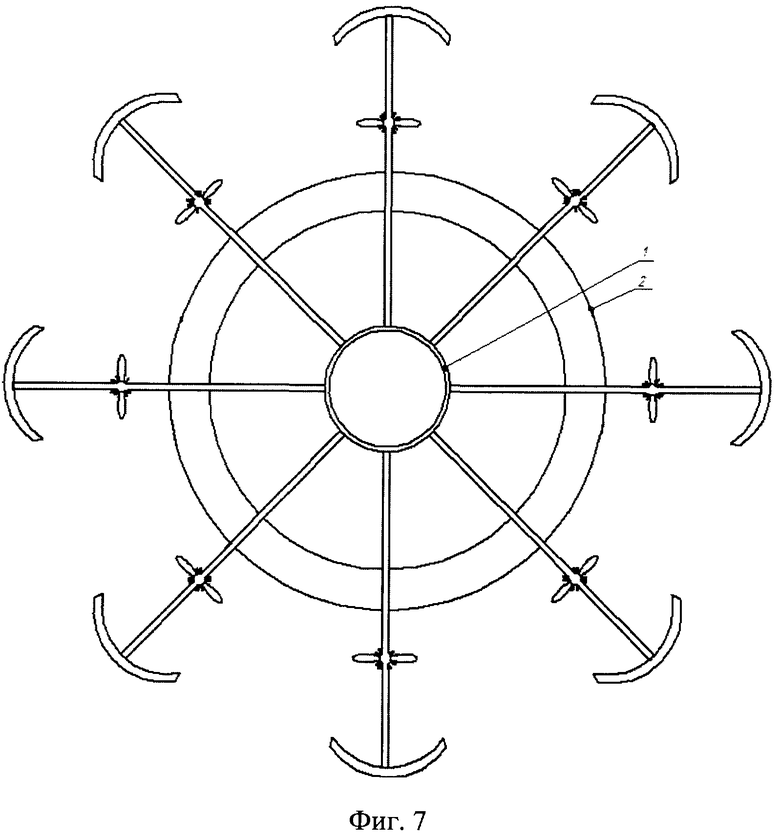
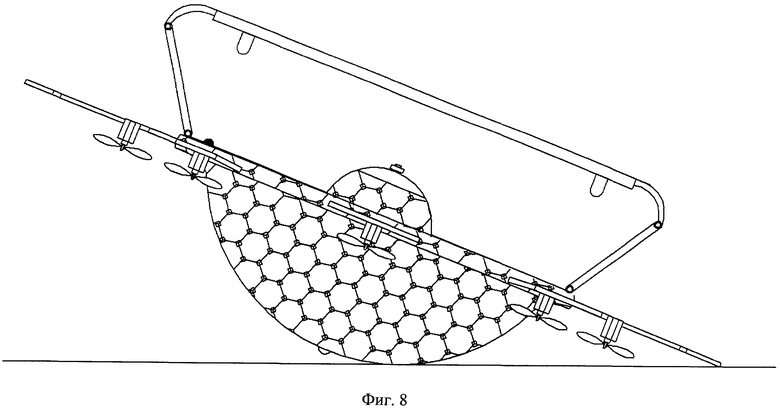
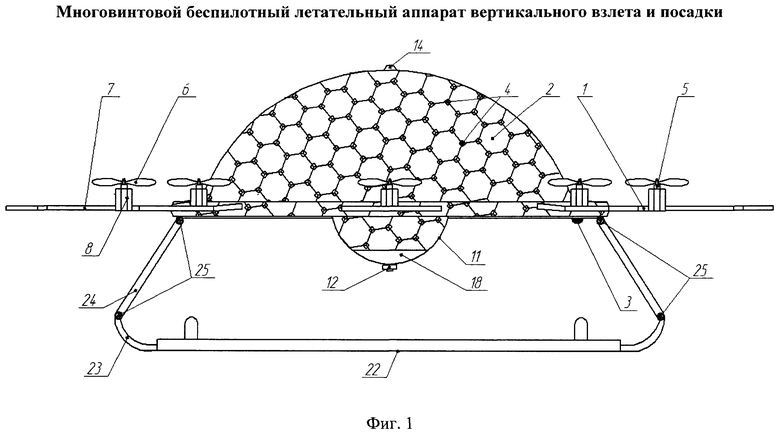
Сущность предлагаемого изобретения заключается в том, чтобы обеспечить улучшенные эксплуатационные качества летательного аппарата за счет: создания дополнительной подъемной силы, используя герметичную полусферу, заполненную инертным газом Гелием и подъемной силы, возникающей от набегающего потока воздуха на эту герметичную полусферу; защиты работающих подъемно-маршевых электродвигателей от перегрева; максимально комфортных условий для работы целевой аппаратуры, путем ее изоляции, от вибраций, создаваемых подъемно-маршевыми электродвигателей, с помощью амортизатора маятникового подвеса, минимизирующего влияние положения летательного аппарата в пространстве на качество выполнения полетного задания на фотовидеосъемку местности или мониторинга окружающей среды; а также обеспечения мягкой посадки летательного аппарата за счет применения упругих дуг, лыжеобразного шасси, связанных с концами опорных углепластиковых стержней цилиндрическими шарнирами, другие же концы этих углепластиковых стержней через такие же цилиндрические шарниры закреплены на несущей круговой многолучевой углепластиковой раме. Составные части и устройства летательного аппарата представлены на следующих рисунках: на Фиг. 1 изображен общий вид летательного аппарата, вид сбоку; вид летательного аппарата сверху изображен на Фиг. 2; вид летательного аппарата снизу изображен на Фиг. 3; на Фиг. 4 показан летательный аппарат в разрезе, вид сбоку; работа шарнирного маятникового подвеса при различных углах крена летательного аппарата представлена на Фиг. 5; подъемные силы, действующие на летательный аппарат, показаны на Фиг. 6; на Фиг. 7 показана несущая круговая многолучевая углепластиковая силовая рама; на Фиг. 8 представлено положение летательного аппарата при опрокидывании. Многовинтовой беспилотный летательный аппарат вертикального взлета и посадки имеет следующие составные части и устройства: несущую круговую многолучевую углепластиковую силовую раму 1; герметичную полусферу 2, выполненную из непроницаемого материала; ниппель 3 для заправки герметичной полусферы 2 инертным газом Гелием; пленочная солнечная батарея 4, покрывающая всю внешнюю поверхность герметичной полусферы 2; подъемно-маршевые электродвигатели 5 с несущими винтами 6, закрепленными на концах несущей круговой многолучевой углепластиковой силовой рамы 1; защитные углепластиковые дуги 7 подъемно-маршевых электродвигателей 5; алюминиевые ребристые рубашки охлаждения 8 подъемно-маршевых электродвигателей 5; стандартную аппаратуру управления 9 летательным аппаратом (не показана); LI-PO аккумуляторные батареи 10; сферический сегмент 11 для размещения аппаратуры целевого назначения 12; контроллер заряда-разряда 13 LI-PO аккумуляторных батарей 10; датчик углов крена 14 летательного аппарата, размещенный на герметичной полусфере в верхней его части; шаровой маятниковый подвес 15 для аппаратуры целевого назначения 12, который, в свою очередь, состоит из опоры 16, шара 17, круговой сферической пластины 18, углепластикового стержня 19, который верхним концом неподвижно соединен с шаром 17, а нижний его конец - с круговой сферической пластиной 18, внешняя поверхность которой конструктивно повторяет форму внутренней поверхности малой полусферы 11, причем эти поверхности установлены относительно друг друга с зазором; внутренняя поверхность опоры 16 шара 17 имеет фторопластовое покрытие 20; резиновый амортизатор 21 шарового маятникового подвеса 15; амортизированное посадочное лыжеобразное шасси 22, выполненное из углепластика; упругие пластинчатые дуги 23 амортизированного посадочного лыжеобразного шасси 22, причем упругие пластинчатые дуги 23 выполнены из пружинной стали; углепластиковые опорные стержни 24, соединяющие упругие пластинчатые дуги 23 амортизированного посадочного лыжеобразного шасси 22 с несущей круговой многолучевой углепластиковой силовой рамой 1 с помощью цилиндрических шарниров 25. Летательный аппарат работает следующим образом. По команде со стандартной аппаратуры управления 9 (не показана) запускаются подъемно-маршевые электродвигатели 5, которые питаются электроэнергией от LI-PO аккумуляторных батарей 10, летательный аппарат взлетает вертикально, при этом все подъемно-маршевые электродвигатели 5 работают с одинаковым числом оборотов. При вертикальном взлете летательного аппарата на него действуют следующие силы (Фиг. 6): F,- подъемная сила несущих винтов 6 подъемно-маршевых электродвигателей 5; равнодействующая сила Rxy аэродинамических сил Fy и Fx, возникающих от набегающего ветрового потока воздуха на герметичную полусферу 2; подъемная сила FHe, создаваемая инертным газом Гелием, которым заполнена полость герметичной полусферы 2. Общая подъемная сила Р, равная геометрической сумме Fi - подъемных сил несущих винтов 6 подъемно-маршевых электродвигателей 5, равнодействующей сила Rxy и подъемной силы FHe-Наличие сил Rxy и FHe снижает нагрузку на подъемно-маршевые электродвигатели 5, которые питаются электроэнергией от LI-PO аккумуляторных батарей 10. Зарядка LI-PO аккумуляторных батарей 10 обеспечивается солнечной радиацией, действующей на пленочную солнечную батарею 4, покрывающую всю внешнюю поверхность герметичной полусферы 2 и малой полусферы 11, тем самым продлевается время нахождения летательного аппарата в полете (Фиг. 1, Фиг. 2). Алюминиевые ребристые рубашки охлаждения 8 подъемно-маршевых электродвигателей 5 предназначены для лучшего отвода тепла и защиты от перегрева подъемно-маршевых электродвигателей 5 (Фиг. 1, Фиг. 2). Целевая аппаратура, например фото или видео камеры, предназначенные для аэрофотосъемки или мониторинга местности в режиме реального времени, размещены на малой полусфере 11 на круговой сферической пластине 18, которая неподвижно соединена с углепластиковым стержнем 19 шарового маятникового подвеса 15 (Фиг. 1, Фиг. 4). Горизонтальный полет летательного аппарата в любую сторону осуществляется за счет уменьшения числа оборотов несущих винтов 6 подъемно-маршевых электродвигателей 5, расположенных на той стороне, куда происходит горизонтальный полет летательного аппарата. В этом случае летательный аппарат наклоняется на определенный угол α, но не более 45° в сторону горизонтального полета (Фиг. 5). Угол наклона летательного аппарата контролируется датчиком углов крена 14, значение этого угла фиксируется на стандартной аппаратуре управления 9 (не показана). Угол наклон α летательного аппарата не должен препятствовать правильной аэрофотосъемке. Чтобы исключить влияние наклона летательного аппарата на качество аэрофотосъемки используется шаровой маятниковый подвес 15 (Фиг. 4) с углепластиковым стержнем 19, на конце которого жестко закреплена круговая сферическая пластина 18 с размещенной на ней целевой аппаратурой, в рассматриваемом случае - фото или видео камеры. При наклоне летательного аппарата в любую сторону шар 17 под действием силы тяжести, возникающей от суммарного веса углепластикового стержня 19, круговой сферической пластины 18 и размещенной на ней целевой аппаратурой, в рассматриваемом случае - фото- или видеокамеры, поворачивается, скользя по фторопластовому покрытию 20 внутренней поверхности опоры 16. Тогда углепластиковый стержень 19 и размещенная на круговой сферической пластине 18 целевая аппаратура, в рассматриваемом случае - фото- или видеокамеры, занимают строго вертикальное положение, чем исключается искажение изображения местности при аэрофотосъемке (Фиг. 5). Примененный в конструкции летательного аппарата резиновый амортизатор 21 шарового маятникового подвеса 15 исключает вибрационное воздействие от работающих подъемно-маршевых электродвигателей 5 на работу фото или видео камер (Фиг. 4). Обеспечение мягкой посадки летательной аппарата осуществляется с помощью амортизированного посадочного лыжеобразного шасси 22 (Фиг. 1). При касании земли опорные стержни 24, одним концом через цилиндрический шарнир 25 опираются на упругие пластинчатые дуги 23, которые, разгибаясь, смягчают ударную нагрузку, другим концом - через такой же цилиндрический шарнир 25 с несущей круговой многолучевой углепластиковой силовой рамой 1, при этом опорные стержни 24 поворачиваются в цилиндрических шарнирах 25, компенсируя перемещения, которые образуются при разгибе упругих пластинчатых дуг 23 (Фиг. 1). После посадки летательного аппарата через ниппель 3 проводится при необходимости заправка или дозаправка герметичной полусферы инертным газом Гелием. При посадке летательного аппарата на склоны местности возникает опасность его опрокидывания и повреждения подъемно-маршевых электродвигателей 5, для исключения этого явления применены защитные углепластиковые дуги 7, которые размещены на концах лучей несущей круговой многолучевой углепластиковой силовой рамы 1 (Фиг. 8).
Список цитированных источников
1. Летательный аппарат вертикального взлета, патент США №3889902, кл. 244-17.23.1975.
2. Летательный аппарат вертикального взлета, заявка на изобретение WO 2006048205 A1, РСТ/ЕР 05/011589, 28.10.2005.
3. Многовинтовой летательный аппарат с вертикальным взлетом, патент RU 2001836 C1, В64С 27/08.
4. Беспилотный летательный аппарат вертикального взлета и посадки, патент на изобретение RU 2511735 C1, В64С 29/00.
5. Малогабаритный беспилотный летательный аппарат (МБЛА ВВП), патент на изобретение, заявка DE №102005046155, МПК В64С 27/82, 27/10.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2009 |
|
RU2403183C2 |
| Беспилотный летательный аппарат вертикального взлёта и посадки и способ его изготовления | 2023 |
|
RU2819460C1 |
| Беспилотный летательный аппарат вертикального взлета и посадки | 2017 |
|
RU2716391C2 |
| МОДУЛЬНАЯ КОНСТРУКЦИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2017 |
|
RU2681423C1 |
| АЭРОПОЕЗД С ПИТАНИЕМ ОТ ТРОЛЛЕЯ (ВАРИАНТЫ) | 2018 |
|
RU2692345C1 |
| СПОСОБ РАБОТЫ ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТАНОВКА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2024 |
|
RU2833362C1 |
| АКВААЭРОКОСМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2626418C2 |
| МАЛОРАЗМЕРНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВОЗМОЖНОСТЬЮ ПЕРЕМЕЩЕНИЯ ПО ПОВЕРХНОСТИ ЗЕМЛИ | 2023 |
|
RU2807493C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ (ВАРИАНТЫ) | 2016 |
|
RU2648491C1 |
| БЕСПИЛОТНЫЙ КОМБИНИРОВАННЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2485018C1 |
Изобретение относится к области авиации, в частности к конструкциям беспилотных летательных аппаратов. Многовинтовой беспилотный летательный аппарат вертикального взлета и посадки (МБЛА ВВ) содержит несущую круговую многолучевую раму, изготовленную из углепластика, полусферу, выполненную из непроницаемой оболочки, заполненной гелием, ниппель для заправки оболочки гелием, подъемно-маршевые электродвигатели, алюминиевые ребристые рубашки охлаждения подъемно-маршевых электродвигателей, датчик углов крена, лыжеобразное шасси. На всей поверхности полусфер размещены пленочные солнечные батареи. В полости малой полусферы размещена стандартная аппаратура управления, аппаратура целевого назначения, контроллер заряда-разряда, аккумуляторные батареи, обеспечивающие работу электродвигателей, шаровой маятниковый подвес. Достигается повышение эксплуатационных свойств БПЛА. 2 з.п. ф-лы, 8 ил.
1. Многовинтовой беспилотный летательный аппарат вертикального взлета и посадки, имеющий несущую круговую многолучевую углепластиковую силовую раму, подъемно-маршевые электродвигатели, стандартную аппаратуру управления летательного аппарата, отличающийся тем, что содержит герметичную полусферу, заполненную инертным газом гелием, жестко соединенную с несущей круговой многолучевой рамой, защитные углепластиковые дуги, установленные на концах лучей несущей круговой многолучевой углепластиковой рамы, ниппель герметичной полусферы, алюминиевые ребристые рубашки охлаждения подъемно-маршевых электродвигателей, малую полусферу, располагающуюся в центре нижней плоскости герметичной полусферы, пленочную солнечную батарею, размещенную на всей поверхности полусферы и малой полусферы, контроллер заряда-разряда, датчик углов крена, расположенный в центре верхней части снаружи герметичной полусферы, шаровой маятниковый подвес, круговую сферическую пластину, закрепленную в конце маятникового подвеса, опору шара и шар шарового маятникового подвеса, расположенные в полости малой полусферы, фторопластовое покрытие внутренней поверхности опоры шара, углепластиковый стержень шарового маятникового подвеса, резиновый амортизатор шарового маятникового подвеса, амортизированное посадочное лыжеобразное шасси, упругие пластинчатые дуги, выполненные из пружинной стали, углепластиковые опорные стержни, одним концом соединенные с помощью цилиндрических шарниров с концами упругих дуг лыжеобразных шасси, а другим - жестко закреплены на несущей круговой многолучевой углепластиковой раме.
2. Многовинтовой беспилотный летательный аппарат вертикального взлета и посадки по п. 1, отличающийся тем, что в полости малой полусферы размещены аппаратура целевого назначения, контроллер заряда-разряда, LI-РО аккумуляторные батареи.
3. Многовинтовой беспилотный летательный аппарат вертикального взлета и посадки по п. 1, отличающийся тем, что датчик угла крена размещен на герметичной полусфере в верхней его части.
| ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ | 2007 |
|
RU2339543C1 |

