Изобретение относится к малогабаритным авиационным системам с дистанционно пилотируемыми летательными микроаппаратами для локального мониторинга урбоэкосистемы, в частности к области винтокрылых летательных аппаратов, и предназначено для фото- и видеоразведки в режиме реального времени, а также биологической, химической и ядерной разведки местности и т.п.
Известны малогабаритные авиационные системы, содержащие беспилотные летательные аппараты с автономным электроприводом, передвижной контейнер и систему дистанционного управления (см., например, патент РФ №2015067, МКИ В64С 39/02, 1992).
Известен авиационный разведывательный комплекс, содержащий дистанционно пилотируемый летательный аппарат с радиоуправляемой бортовой системой обеспечения полета летательного аппарата, бортовой приемопередающей аппаратурой и видеокамерой с передатчиком изображений, а также мобильный комплекс управления и обработки информации с наземной приемопередающей аппаратурой, приемником видеоизображения и радионавигационной системой управления летательным аппаратом (см. патент РФ №2067952, МКИ В64С 39/02, 1992).
Дистанционно пилотируемый летательный аппарат (ЛА) указанного авиационного разведывательного комплекса содержит фюзеляж, на котором размещены винтовой движитель, а также рулевое управление по курсу и тангажу.
Недостатками известных комплексов являются значительные габариты и вес, что не позволяет сделать их переносными и визуально скрытными, необходимость постоянного контроля и корректировки полета ЛА оператором с поверхности Земли, что требует обучения специальным навыкам вождения; элементы управления размещены на громоздком шасси, в связи с чем невысока проходимость комплексов на местности и неудовлетворительны шумовые характеристики; низкая дальность разведки в режиме радиоуправления. Кроме того, в самом ЛА комплексов не полностью скомпенсирован реактивный момент, под действием которого аппарат вращается вокруг оси курса, следствием чего является потеря мощности. Другой недостаток ЛА связан с незащищенностью винта от механических воздействий, которые зачастую неизбежны при приземлении аппарата.
Известен летательный микроаппарат портативного комплекса авианаблюдений, в котором осуществлено устранение или существенное уменьшение указанных недостатков, а именно существенное уменьшение габаритов и веса комплекса, что обеспечивает возможность сделать его переносными и визуально скрытным, автоматизация управления и корректировки полета летательного микроаппарата, размещение элементов управления в портативном контейнере, в связи с чем обеспечивается высокая проходимость комплексов на местности и практически исключается фактор влияния шумовых характеристик, существенное увеличение дальности разведки. В самом летательном микроаппарате комплекса полностью скомпенсирован реактивный момент и исключена соответствующая потеря мощности, а также винт защищен от механических воздействий при приземлении аппарата (см. патент РФ №2232104, кл. В64С 29/02, опубл. 10.07.2004).
Основой для технологической выполнимости автономно пилотируемого летательного микроаппарата являются успехи в нескольких микротехнологиях, в особенности технологиях микроэлектромеханических систем. Эти системы объединяют планарные электронные микрокомпоненты с сопоставимыми по размерам пространственными электромеханическими структурами различной сложности, что обеспечивает уникальные функциональные возможности. В настоящее время такие устройства (например, самарий-кобальтовый мотор Firefly, микромеханический акселерометр ADXL105, микромеханический гироскоп ADXSR300) производятся промышленным способом. Другим направлением развития микроэлектронных систем является разработка крошечных видеокамер (например, Eyecam), миниатюрных инфракрасных датчиков и датчиков биологического и химического анализа для обнаружения опасных объектов. Размер этих устройств не превышает габаритов обычных микросхем и является определяющим в выборе размеров автономно пилотируемого летательного микроаппарата.
Указанный выше летательный микроаппарат принят за прототип.
Недостатками прототипа являются невысокие аэродинамические характеристики и климатическая надежность конструкции, а также неудобство эксплуатации из-за сложности замены функциональных элементов устройства. Дополнительным недостатком является вероятность возникновения частотных и шумовых помех для аэродинамики конструкции, радиоканалов управления и телеметрии летательного микроаппарата.
Техническим результатом предлагаемого изобретения является повышение надежности конструкции, климатической устойчивости управления и полетных характеристик, а также упрощения эксплуатации летательного микроаппарата.
Указанный технический результат в летательном микроаппарате, содержащем несущую конструкцию, в средней части которой размещен приборный отсек, по разные стороны которого расположены, по меньшей мере, два винтовых блока, а также размещенные в приборном отсеке видеокамера, радиоуправляемая бортовая система обеспечения полета летательного аппарата и аккумуляторная батарея, достигается тем, что радиоуправляемая бортовая система обеспечения полета летательного аппарата выполнена в виде размещенного в полиуретановой основе электронного модуля, состоящего из связанных между собой элементами электромеханического монтажа платы усилителя мощности, бесплатформенной инерциальной навигационной системы, модуля приемника бортовой навигационной системы, модуля приемника-передатчика команд управления и телеметрической информации, причем внешняя поверхность полиуретановой основы электронного модуля выполнена сферической, а аккумуляторная батарея размещена в приборном отсеке на верхней стороне съемной пластины, связанной с несущей конструкцией вертикально направленными изогнутыми стойками, при этом на нижней стороне этой пластины установлены видеокамера и нагревательный элемент.
Кроме того, в нижней части приборного отсека может быть установлен теплоизолирующий корпус, охватывающий съемную пластину с аккумуляторной батареей и нагревательным элементом и опирающийся наружной стороной на изогнутые стойки.
Кроме того, на свободных концах изогнутых стоек размещены внешний электрический разъем и выключатель аккумуляторной батареи.
Кроме того, винтовые блоки связаны с несущей конструкцией посредством образующих одноосные кардановые подвесы разъемных кронштейнов, а между собой - стабилизаторами.
Кроме того, винты винтовых блоков выполнены с числом лопастей больше двух.
Таким образом, уменьшение коэффициентов лобового сопротивления, уменьшение влияния осадков и расширение температурного диапазона работы системы управления движением и навигации летательного микроаппарата обеспечивается выполнением поверхностей приборного отсека в виде полусферы из пенополиуретана.
Увеличение температурного диапазона в области низких температур в отсеке аккумуляторной батареи обеспечивается установкой электрических нагревательных элементов, соединенных с внешним разъемом на изогнутой стойке.
Уменьшение времени замены аккумуляторной батареи обеспечивается тем, что приборный отсек выполнен разъемным.
Уменьшение шумов в каналах управления и навигации обеспечивается тем, что конструкция летательного микроаппарата разрабатывается из условия f1<f2<f3<f4, где f1 - частота цифрового автопилота, f2 - резонансная частота конструкции летательного микроаппарата, f3 - частота вращения винтов, f4 - частота вращения электрических двигателей винтов, чему способствует выполнение заливки приборного отсека и теплоизолирующего корпуса из пенополиуретана.
Повышению точности стабилизации летательного микроаппарата и уменьшению влияния атмосферных осадков на работу двигателей способствует установка на валы электродвигателей планетарных редукторов и сборка двигателя с редуктором в одноосный карданов подвес, а также снабжение винтовых блоков колпаками из пенополиуретана.
Увеличению жесткости конструкции и коэффициентов демпфирования летательного микроаппарата способствует установка стабилизаторов, закрепленных на винтовых блоках.
Уменьшение модуляции моментов инерции относительно конструктивной системы координат обеспечивается выполнением винтов с количеством лопастей больше двух.
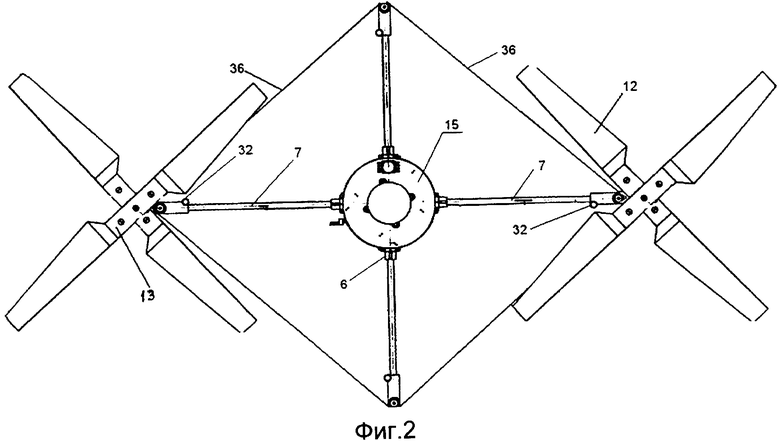
На фиг.1 представлен вид спереди летательного микроаппарата;
на фиг.2 приведен вид сверху летательного микроаппарата;
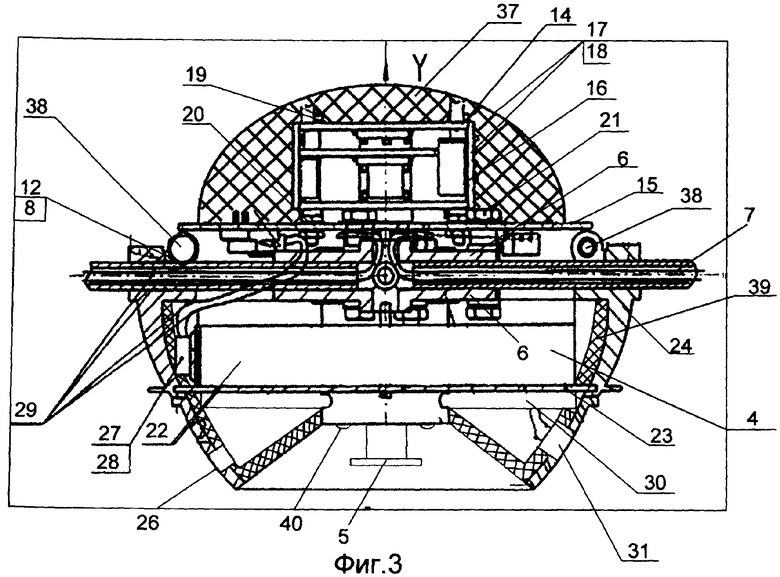
на фиг.3 представлен вид спереди приборного отсека летательного микроаппарата.
Перечень обозначений:
1. Несущая конструкция;
2. Система управления движением и навигации;
3. Винтовые блоки;
4. Аккумуляторная батарея (АБ);
5. Видеокамера;
6. Крест-соединитель;
7. Балки;
8. Верхний колпак;
9. Кронштейн;
10. Электродвигатели;
11. Планетарные редукторы;
12. Пропеллеры;
13. Винты;
14. Электронный блок системы управления и навигации;
15. Плата усилителей мощности;
16. Бесплатформенная инерциальная навигационная система (БИНС);
17. Модуль приемника бортовой навигационной системы;
18. Модуль приемника-передатчика команд управления и телеметрической информации;
19. Шпильки;
20. Амортизаторы;
21. Болтовое соединение;
22. Отсек аккумуляторной батареи;
23. Пластина;
24. Вертикальные стойки;
25. Проблесковые маячки;
26. Выключатель АБ;
27. Вилка аккумулятора;
28. Розетка аккумулятора;
29. Провода;
30. Нагревательный элемент;
31. Внешний электрический разъем;
32. Болты.
33. Нижний колпак;
34. Вал редуктора;
35. Переходник;
36. Стабилизатор;
37. Пенополиуретан;
38. Болты;
39. Теплоизолирующий корпус;
40. Винты крепления видеокамеры.
В состав летательного микроаппарата с четырьмя винтовыми блоками входят несущая конструкция 1 (Фиг.1), система управления движением и навигации 2, винтовые блоки 3, аккумуляторная батарея 4, видеокамера 5.
Несущая конструкция 1 летательного микроаппарата строится на основе креста-соединителя 6 (Фиг.2), в котором выполнены четыре отверстия для крепления несущих балок 7. На противоположные концы балок 7 установлены винтовые блоки 3, закрепленные на балке с помощью кронштейнов 9. Кронштейн 9 крепится к балке 7 посредством болтов 32. Электродвигатели 10 винтовых блоков 3 с редукторами 11 закрепляются на кронштейнах 9 с помощью винтов. На кронштейнах 9 закреплены верхние колпаки 8 и нижние колпаки 33 винтовых блоков 3 и проблесковые маячки 25. В верхнем колпаке выполнено отверстие, через которое выходит ведомый вал редуктора 34. На валу редуктора 34 закреплены переходники 35, на которых установлены пропеллеры 12. Пропеллеры 12 устанавливаются посредством винтов 13. Винтовые блоки 3 соединены между собой стабилизаторами 36. Электронный модуль системы управления движением и навигации 14 летательного микроаппарата выполнен конструктивно в виде этажерки из связанных между собой элементами электромеханического монтажа платы усилителя мощности 15 (Фиг.3), бесплатформенной инерциальной навигационной системы (БИНС) 16, модуля приемника бортовой навигационной системы 17 и модуля приемника-передатчика команд управления и телеметрической информации 18. Конструкция реализуется путем соединения БИНС 16 через разъемы с модулем 18 и модулем приемника бортовой навигационной системы 17, вся сборка посредством шпилек 19 через резиновые амортизаторы 20 укрепляется на плате усилителей мощности 15. Плата усилителей мощности 15 устанавливается на кресте соединителя 6 с использованием четырех болтовых соединений 21 через четыре отверстия в кресте соединителя. Электронный модуль 14 залит пенополиуретаном 37. Аккумуляторная батарея 4 устанавливается на пластине 23 с использованием фиксирующих вертикальных стоек 24. Вертикальные стойки 24 закреплены на балках 7 болтами 38. С внутренней стороны стоек 24 установлен теплоизолирующий корпус 39. Аккумуляторная батарея соединена через вилку аккумулятора 27 с розеткой аккумулятора 28, размещенной на плате усилителей мощности. Электрическое соединение двигателей 10 реализуется с использованием проводов 29 по два от каждого двигателя, проходящих внутри трубок 7 и выходящих через общее отверстие в кресте соединителя. Выходы каждой пары проводов с помощью пайки подсоединяются к плате усилителей мощности 15. Одновременно на плате 23 закреплена видеокамера 5. Полезная нагрузка - видеокамера 5 устанавливается с нижней стороны пластины 23, направленной по вертикальной оси визирования с помощью винтов 40. Одновременно с нижней стороны пластины 23 установлен нагревательный элемент 30 и теплоизолирующий корпус 39. На корпусе 39 установлены внешний разъем 31 и выключатель АБ 26.
Работа портативного комплекса авианаблюдений осуществляется следующим образом.
На экран портативного персонального компьютера выводится карта района патрулирования и по сигналу наземной интегрированной бесплатформенной инерциальной навигационной системы - координаты оператора. Полетное задание, включающее в себя траекторию, скорость, высоту полета, а также координаты пунктов назначения, задается на земле оператором с помощью клавиатуры портативного персонального компьютера. После этого управление аппаратом возложено на систему управления, состоящую из бесплатформенной инерциальной навигационной системы и модуля спутниковой навигации. Взлет аппарат совершает автоматически, с портативного контейнера или с руки оператора. Совершив набор высоты, летательный аппарат следует по заданному маршруту с заданной траекторией (прямолинейная, змейка и т.д.), с указанной скоростью и высотой полета и совершает автоматическую посадку в заданной точке.
Стабилизация летательного микроаппарата по траектории его движения осуществляется автоматически с помощью автопилота. В автопилоте имеется три канала стабилизации: курса, крена и тангажа. В качестве измерителей угловой скорости используются микромеханические вибрационные гироскопы. В качестве датчиков высоты используются микромеханический акселерометр и барометрический высотомер.
Законы управления формируются с помощью микропроцессора и позволяют осуществлять стабилизацию курса, крена и тангажа в прямолинейном полете (стабилизация углов относительно центра масс) и координированных разворотов. Навигация в процессе полета осуществляется с помощью наземной интегрированной бесплатформенной инерциальной навигационной системы и приемника глобальной навигационной системы. Для кратковременных участков полета навигация осуществляется в системе координатной сетки для данной проекции карты.
Винтовой блок автономно пилотируемого летательного микроаппарата представляет собой устройство с одним несущим винтом. Подъемная сила создается воздушным винтом, приводимым в движение электродвигателем, питанием для которого служит аккумуляторная батарея. Для создания горизонтальной составляющей тяги винта двигатель установлен в карданов подвес.
Система компенсации реактивного момента действует по следующему принципу. Блок БИНС определяет наличие и значение угловой скорости вокруг оси симметрии (курса) автономно пилотируемого летательного микроаппарата. Информация об угловой скорости обрабатывается бортовым микропроцессором, который синтезирует сигнал, посылаемый на электродвигатели винтов, и с помощью алгоритма управления регулирует соотношение тяг винтов, и таким образом система компенсации реактивного момента непрерывно обеспечивает стабильное угловое положение автономно пилотируемого летательного микроаппарата относительно оси симметрии.
Предложенным техническим решением обеспечен технический результат предлагаемого изобретения, заключающийся в повышении надежности конструкции, климатической устойчивости управления и полетных характеристик, а также упрощении эксплуатации летательного микроаппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОРТАТИВНЫЙ КОМПЛЕКС АВИАНАБЛЮДЕНИЙ И АВТОНОМНОПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ ДЛЯ НЕГО | 2003 |
|
RU2232104C1 |
| Беспилотный летательный аппарат | 2023 |
|
RU2806131C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2023 |
|
RU2801404C1 |
| Беспилотный летательный аппарат | 2023 |
|
RU2811206C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ КОМПЛЕКС | 2023 |
|
RU2810956C1 |
| ПОРТАТИВНЫЙ КОМПЛЕКС ВОЗДУШНОГО БАЗИРОВАНИЯ ОПТИКО-ВИЗУАЛЬНОГО МОНИТОРИНГА | 2006 |
|
RU2320519C1 |
| СПОСОБ ФОРМИРОВАНИЯ РЕГИОНАЛЬНЫХ БЕСПРОВОДНЫХ СЕТЕЙ ПЕРЕДАЧИ ИНФОРМАЦИИ И ТЕЛЕКОММУТАЦИОННАЯ ВОЗДУШНАЯ ПЛАТФОРМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2287910C1 |
| Беспилотный летательный комплекс | 2024 |
|
RU2836414C1 |
| АВИАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2007 |
|
RU2346852C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО МОНИТОРИНГА ОБЪЕКТОВ ЭЛЕКТРОЭНЕРГЕТИКИ | 2021 |
|
RU2776589C1 |
Изобретение относится к малогабаритным авиационным системам с дистанционно пилотируемыми летательными микроаппаратами. Летательный микроаппарат содержит несущую конструкцию, в средней части которой размещен приборный отсек, по разные стороны которого расположены, по меньшей мере, два винтовых блока, а также размещенные в приборном отсеке видеокамера, радиоуправляемая бортовая система обеспечения полета летательного аппарата и аккумуляторная батарея. Радиоуправляемая бортовая система выполнена в виде размещенного в полиуретановой основе электронного модуля, состоящего из связанных между собой элементами электромеханического монтажа платы усилителя мощности, бесплатформенной инерциальной навигационной системы, модуля приемника бортовой навигационной системы, модуля приемника-передатчика команд управления и телеметрической информации. Внешняя поверхность полиуретановой основы электронного модуля выполнена сферической, а аккумуляторная батарея размещена в приборном отсеке на верхней стороне схемной пластины, связанной с несущей конструкцией вертикально направленными изогнутыми стойками, при этом на нижней стороне этой пластины установлены видеокамера и нагревательный элемент. Изобретение направлено на повышение надежности конструкции, климатической устойчивости управления и улучшение полетных характеристик, а также на упрощение эксплуатации летательного микроаппарата. 5 з.п. ф-лы, 3 ил.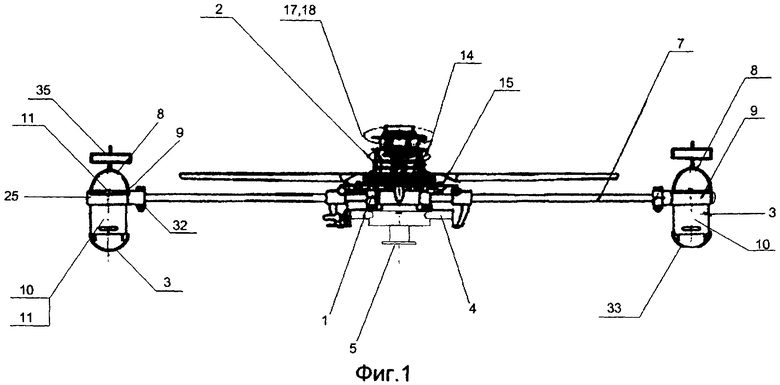
| ПОРТАТИВНЫЙ КОМПЛЕКС АВИАНАБЛЮДЕНИЙ И АВТОНОМНОПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ МИКРОАППАРАТ ДЛЯ НЕГО | 2003 |
|
RU2232104C1 |
| RU 2003105729 A | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| БРИКЕТНО-ПРЕССОВОЧНАЯ МАШИНА | 1934 |
|
SU43533A1 |
| US 2004129833 A, 08.07.2004. | |||

