Изобретение относится к авиации, в частности к беспилотным летательным аппаратам, предназначенным для загоризонтного наблюдения, ведения оптико-электронной, радио-, радиотехнической, метеорологической, радиационной и химической разведки, поисково-спасательных работ, излучения специальных сигналов, организации связи и ретрансляции, мониторинга территории крупных промышленных предприятий и железнодорожных станций, портов, трасс трубопроводов, линий электропередач и т.п.
В числе основных проблем при создании беспилотных летательных аппаратов, кроме проблем создания самого летательного аппарата - носителя целевой нагрузки, отмечаются следующие:
- проблема создания надлежащих условий для полноценного функционирования целевой нагрузки, независимость ее качества работы от внешних возмущающих факторов, бортовых источников вибрации, шума и т.д.;
- минимизация воздействующих факторов на работу целевой нагрузки от линейных и угловых перемещений аппарата, связанных с его управлением, обеспечением стабильности полета и т.д.;
- возможность изменения располагаемой мощности и энергопотребления силовой установки летательного аппарата в зависимости от состава целевой нагрузки как в сторону ее увеличения, так и в сторону ее уменьшения в зависимости от поставленных Заказчиком задач в месте их выполнения. Данные проблемы особенно ярко проявляются с уменьшением линейных размеров летательных аппаратов в категориях мини-БЛА и микро-БЛА. Так, уменьшение линейного размера такого аппарата приводит к уменьшению площади его поверхности в квадрате, массы в кубе, потребной мощности в степени 3,5, а моментов инерции в пятой степени от изменения линейного размера.
Ручное управление такими аппаратами становится не всегда возможным, а все большую роль приобретает автоматизированное управление и новые аэродинамические компоновки летательных аппаратов.
Известны несколько подходов к решению данных проблем.
Так, еще в 1911 г. преемник Н.Е.Жуковского Борис Николаевич Юрьев разрабатывал проект многовинтового вертолета, образуемого соединением одинаковых и независимых «элементов» - винтомоторных групп. Такая система обещала ряд преимуществ: отсутствие тяжелой трансмиссии (валов и редукторов); безопасность в случае отказа одного из «элементов»; возможность балансировки с помощью изменения шага винтов, что позволяло обойтись без автомата перекоса. Отработав один «элемент», можно было создавать на его основе вертолеты любой грузоподъемности. (См. В.Р.Михеев «Вертолеты дореволюционной России» - М.: Изд-во МАИ, 1992 г., стр.161, 162).
Однако этот проект опережал время и не мог быть полноценно реализован из-за отсутствия необходимых силовых установок и систем точной синхронизации работы их с выполнением функций управления воздушными винтами.
Известен также проект многовинтового вертолета выдающегося деятеля Петроградской научной авиационной школы профессора Георгия Александровича Ботезата, в 1922 г., вертолет которого, построенный в США, поднялся впервые в воздух под управлением своего конструктора. Крестообразная форма вертолета на концах имела четыре несущих винта диаметром по восемь метров, приводимых от ротативного двигателя «Бентли» БР-2 мощностью в 220 л.с. Оси несущих винтов были немного завалены внутрь для повышения устойчивости вертолета, так как расстояние от плоскости вращения воздушных винтов до центра тяжести аппарата было сравнительно небольшим. Изменением общего шага винтов обеспечивались взлет и посадка, а также продольно-поперечное управление. Аварийную посадку предполагалось осуществлять на режиме авторотации. Путевое управление обеспечивалось дифференциальным изменением шага воздушных винтов, расположенных по бокам. Взлетный вес вертолета достигал двух тонн.
Высокая удельная нагрузка на мощность, равная примерно 9,18 кг/л.с., не позволяла аппарату устойчиво висеть в воздухе, а несовершенство силовых установок того времени, их низкая приемистость не позволяли адекватно реагировать на атмосферные возмущения. Небольшое расстояние от плоскости вращения несущих винтов до центра тяжести аппарата усугубляло все вышеперечисленное. (См. В.Р.Михеев «Вертолеты дореволюционной России». - М.: Изд-во МАИ, 1992 г. - стр.195, 196).
Из современного уровня техники известен мобильный комплекс на основе автономно пилотируемых летательных микроаппаратов (АП ЛМА) «Пустельга», предназначенный для локального мониторинга. (Разработка ФГУП «Научно-исследовательский институт прикладной механики им. Академика В.И.Кузнецова», журнал «Военный парад» 2003 года №2, стр.70, №4, стр.34, Россия).
Входящий в комплекс АП ЛМА «Пустельга» выполнен по четырехвинтовой схеме с небольшим превышением плоскости вращения воздушных винтов над центром тяжести аппарата и его целевой нагрузкой, которая тесно связана с конструкцией аппарата в его центральной части.
В составе целевой нагрузки ЛМА находится видеокамера. Наличие центровки аппарата, расположенной в непосредственной близости по высоте к плоскости вращения воздушных винтов, обуславливает проявление недостаточного запаса устойчивости по тангажу и крену аппарата, отражает все его эволюции на качестве передаваемого с борта видеоматериала. Кроме того, такая компоновка аппарата накладывает жесткие ограничения по его применению в целом ряде метеоусловий.
Наиболее близким к предлагаемому изобретению по совокупности существенных признаков является многовинтовой летательный аппарат вертикального взлета и посадки (заявка на изобретение WO 2006048205 A1, РСТ/ЕР 05/011589 28.10.2005), содержащий крестообразную раму, по концам которой установлены силовые установки с несущими винтами, а в ее центре размещена целевая нагрузка. Аппарат симметричен относительно вертикальной оси, а при виде сбоку, спереди его плоскость вращения воздушных винтов выполнена с незначительным превышением над центром тяжести аппарата и его целевой нагрузкой.
В данном техническом решении использован принцип жесткой установки целевой нагрузки, поле зрения которой следует траектории полета аппарата при выполнении им всех эволюций. Вибрации и шумы от работы силовых установок передаются целевой нагрузке, вызывая ее работу с искажениями.
Задачей, на решение которой направлено предлагаемое изобретение, является создание такой схемы летательного аппарата вертикального взлета и посадки, при которой его силовые установки были бы сформированы в отдельные многовинтовые легкозаменяемые модули с различными располагаемыми мощностями, набор которых мог бы обеспечить работу летательного аппарата с различной по массе и назначению целевой нагрузкой непосредственно на месте выполнения работ в интересах Заказчика.
Кроме того, ставится задача максимально возможной изоляции бортового электронного оборудования и целевой нагрузки от вибраций и шумов, производимых силовыми установками и воздушными винтами летательного аппарата.
Третьей задачей изобретения является возможность создания такой схемы аппарата, которая позволяла бы производить необходимые для его управления эволюции в пространстве с минимизацией их воздействия на целевую нагрузку или вообще без передачи таковых.
Поставленные технические задачи решаются в результате того, что многовинтовой беспилотный летательный аппарат вертикального взлета и посадки состоит из двух имеющих единую вертикальную ось шарнирно соединенных модулей: подъемно-маршевого с силовыми установками и несущими винтами и модуля оборудования, управления и целевой нагрузки, внутри которого установлена вертикально и закреплена в горизонтально расположенном силовом шпангоуте виброгасящая колонна, причем подьемно-маршевый модуль оснащен двухстепенным виброгасящим шарниром, соединен с колонной и обеспечен возможностью его быстрой замены в полевых условиях на модуль с большей или меньшей мощностью силовых установок, с большим или меньшим их количеством, пропорционально величине и назначению целевой нагрузки аппарата.
Сущность предлагаемого изобретения заключается в том, чтобы обеспечить максимально комфортные условия для работы целевой нагрузки, изолируя ее от механических, аэродинамических шумов и колебаний, создаваемых силовыми установками, а также минимизировать влияние работы управляющих органов и эволюции аппарата на качество выполнения полетного задания.
Этот результат достигается выполнением летательного аппарата состоящим из двух модулей, соединяемых двухстепенным виброгасящим шарниром, закрепляемым на виброгасящей колонне внутри одного из модулей.
Группирование силовых установок в отдельные легкозаменяемые модули позволяет расширить сферу применения аппаратов с одновременным сокращением затрат на их эксплуатацию, ремонт и обслуживание.
Предлагаемое изобретение поясняется чертежами, где
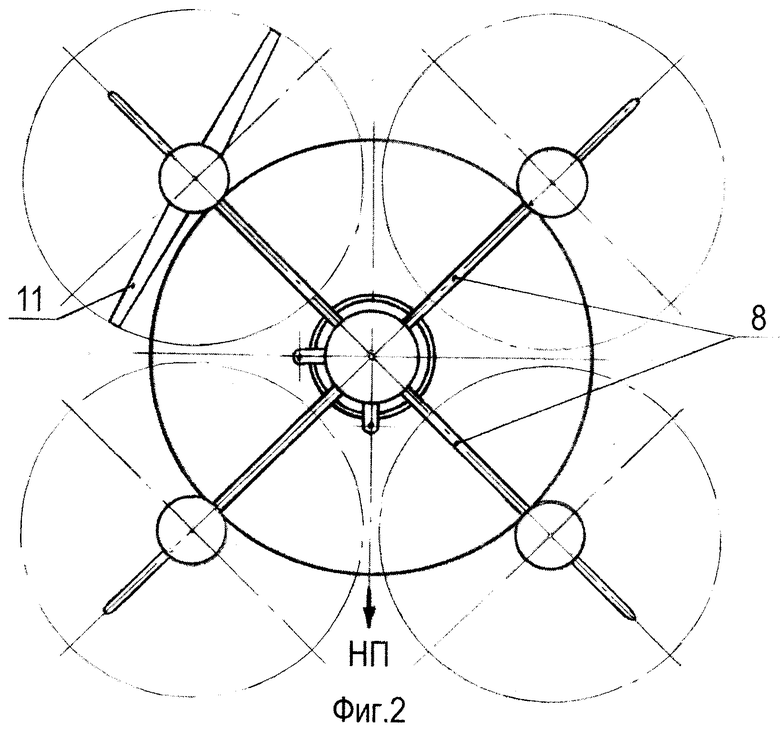
на фиг.1 - вид летательного аппарата спереди;
на фиг.2 - вид летательного аппарата сверху;
на фиг.3 - сечение А-А двухстепенного виброгасящего шарнира;
на фиг.4 - вид сверху на подъемно-маршевый модуль с большим количеством силовых установок.
γ° - угол отклонения подъемно-маршевого модуля для обеспечения возможности управления аппаратом по осям OX, OZ.
Стрелка НП указывает направление полета.
На фото (фиг.5) - летающая модель заявляемого летательного аппарата.
На представленных фигурах использованы следующие обозначения:
1 - подъемно-маршевый модуль;
2 - модуль оборудования, управления и целевой нагрузки;
3 - двухстепенной виброгасящий шарнир;
4 - горизонтально расположенный силовой шпангоут;
5 - виброгасящая колонна;
6 - силовые установки;
7 - целевая нагрузка съема видеоинформации;
8 - пилоны крепления силовых установок;
9 - взлетно-посадочные опоры;
10 - тяги управления наклонами подъемно-маршевого модуля;
11 - несущие винты аппарата;
12 - вертикальная ось аппарата;
13 - сервоприводы;
14 - центр масс аппарата;
15 - оголовок подъемно-маршевого модуля;
16 - кольцо двухстепенного виброгасящего шарнира;
17 - стыковочное кольцо шарнира;
18 - ось двухстепенного виброгасящего шарнира;
19 - набор виброгасящих элементов оси шарнира;
20 - рулевые поверхности управления вокруг оси ОУ;
21 - восьмивинтовой подъемно-маршеый модуль.
Многовинтовой беспилотный летательный аппарат вертикального взлета и посадки состоит из двух шарнирно соединенных модулей: подъемно-маршевого модуля 1, несущего четное количество силовых установок 6 (4, 6, 8, 12 шт. и т.д.) и модуля оборудования, управления и целевой нагрузки 2 (фиг.1). Внутри модуля 2, в соответствии с конструктивно-силовой схемой аппарата, размещен в горизонтальной экваториальной плоскости силовой шпангоут 4, в его центральной части по вертикали 12 закреплена виброгасящая колонна 5, которая представляет собой трубчатую мелкогофрированную конструкцию из композита, например из органита, со специальной ориентацией высокомодульных волокон в упругоотвержденном связующем.
В верхней части виброгасящей колонны 5 установлен двухстепенной виброгасящий шарнир 3, прикрепленный посредством кольца 17 к виброгасящей колонне 5. Качание модуля 1 обеспечивается вокруг осей 18, установленных в наборе виброгасящих композитных элементов 19. Виброгасящий шарнир 3 содержит также кольцо 16, к которому посредством осей 18 в наборе виброгасящих композитных элементов 19 прикреплен оголовок 15 подъемно-маршевого модуля 1. Такая конструкция двухстепенного виброгасящего шарнира 3 позволяет свободно отклонять подъемно-маршевый модуль 1 в двух плосостях, обеспечивая управление аппаратом по осям ОХ и OZ (фиг.3).
К оголовку 15 подъемно-маршевого модуля 1 прикреплены пилоны 8, по концам которых установлены силовые установки 6, которые могут быть снабжены несущими винтами 11 одиночного или соосного типа (фиг.2).
Кроме силовых установок 6 с воздушными винтами 11 могут быть применены силовые установки на основе реактивных двигателей любого принципа работы или силовые установки импеллерного типа, позволяющие обеспечить защищенность воздушных винтов от соударения с посторонними предметами при их работе в стесненных условиях городских кварталов, лесополос, гор и т.д.
Отклонение подъемно-маршевого модуля 1 обеспечивается сервоприводами 13 посредством тяг управления 10. Достаточно большое превышение плоскости несущих винтов 11 над положением центра масс 14 аппарата обеспечивает его высокую устойчивость при работе целевой нагрузки 7.
Управление аппаратом вокруг оси OY обеспечивается отклонением рулевых поверхностей 20, находящихся в воздушном потоке от несущих винтов 11.
В экваториальной части модуля оборудования, управления и целевой нагрузки 2 равномерно по окружности закреплены в силовом шпангоуте 4 взлетно-посадочные опоры 9, обеспечивающие поглощение энергии при посадке и амортизирующие грубые контакты аппарата с земной поверхностью.
Многовинтовой беспилотный летательный аппарат вертикального взлета и посадки функционирует следующим образом.
Взлет аппарата выполняется при вертикальном положении оси 12 аппарата и вертикальном положении силовых установок 6. Вращаемые силовыми установками 6 несущие воздушные винты 11 отбрасывают воздушный поток вниз и обеспечивают тем самым отрыв аппарата от поверхности земли. Аппарат зависает на некоторой высоте над местом старта. Создаваемые силовыми установками 6 вибрации и несущими винтами 11 аэродинамические шумы и колебания гасятся при этом в конструктивных элементах 15, 16, 17, 19 двухстепенного виброгасящего шарнира 3. Часть непогашенных колебаний, передаваемых через виброгасящий шарнир 3, окончательно гасится виброгасящей колонной 5, обеспечивая тем самым более комфортные условия для работы целевой нагрузки 7 аппарата.
На режиме висения при наличии турбулентных возмущений, а также при отсутствии таковых аппарат находится в состоянии устойчивого равновесия, обусловленного низким расположением центра масс 14 по отношению к плоскости вращения несущих воздушных винтов 11, создающих тягу, уравновешивающую массу аппарата.
Интенсивность турбулентных и иных возмущений, действующих на аппарат и превышающих его запас устойчивости, мгновенно вызывает адекватные отклонения подъемно-маршевого модуля 1. Данный процесс по показаниям соответствующих датчиков обеспечивается Бортовой Системой Автоматизированного Управления (БСАУ), которая выдает соответствующие координирующие сигналы на сервопривод 13 и через тяги 10, соединенные с подъемно-маршевым модулем 1, отклоняет его в сторону, противоположную действию возмущения, обеспечивая, таким образом, исходное равенство сил и моментов, действующих на аппарат.
Бортовая Система Автоматизированного Управления аппаратом может быть аналогична описанной в патенте РФ №2312795 от 15.09.2005, В64С 29/02.
Управление аппаратом по высоте обеспечивается изменением шага несущих винтов 11 при соответствующем изменении мощности силовых установок 6 по сигналам БСАУ.
После взлета и набора высоты многовинтовой летательный аппарат вертикального взлета и посадки может перейти в горизонтальный полет, создавая пропульсивную силу наклоном подъемно-маршевого модуля 1 и, соответственно, наклоном плоскостей воздушных винтов 11 в сторону направления полета. Аэродинамическая компоновка аппарата позволяет ему перемещаться в любом направлении с одинаковой скоростью.
Переходной режим полета аппарата из горизонтального в вертикальный производится следующим образом.
Аппарат замедляет горизонтальную скорость полета путем отклонения подъемно-маршевого модуля 1 в сторону, противоположную направлению горизонтального полета; при этом плоскость вращения воздушных винтов 11 также отклоняется на положительный угол, и составляющая тяги несущей системы обеспечивает замедление горизонтального полета с сохранением параметров высоты полета. Аппарат зависает. Уменьшая шаг несущих винтов 11 и режим работы силовых установок 6, БСАУ обеспечивает аппарату безопасную вертикальную скорость снижения вплоть до касания взлетно-посадочными опорами 9 поверхности земли.
На земле, при изменении полетного задания, например, с целью подъема большей целевой нагрузки в том же объеме, возможна замена подъемно-маршевого модуля 1 с переходом от четырехвинтовой схемы к восьмивинтовой. Для этого стыковочное кольцо 17 шарнира отсоединяется от колонны 5, разъединяются тяги управления 10, электроразъемы и четырехвинтовой подъемно-маршевый модуль 1 укладывается в специальную упаковочную тару. Взамен четырехвинтового подъемно-маршевого модуля 1 производится установка восьмивинтового модуля 21, у которого кольцо 17 такого же размера, что и у предыдущего модуля 1, соединяется с посадочной поверхностью виброгасящей колонны 5 и закрепляется фиксирующими элементами. Соединяются тяги управления 10 и электроразъемы. Производятся необходимые проверки работоспособности оборудования, аппаратуры и целевой нагрузки. Заполняется протокол готовности аппарата к выполнению работ в интересах Заказчика.
Таким образом, предложена конструкция летательного аппарата, в котором многовинтовой шарнирно закрепленный подъемно-маршевый модуль обеспечивает полет и управление аппаратом, создавая более защищенные условия для работы целевой нагрузки от вибраций, колебаний и шумов, а группирование силовых установок в отдельные легкозаменяемые модули позволяет расширить сферу применения аппарата с сокращением затрат на обслуживание. Аппарат способен в равной мере выполнять поставленные задачи независимо от направления его перемещения в пространстве и скорости полета.
Аппарат может работать с оборудованием более высокого класса точности и интеллектуалоемкости с использованием новых принципов помехозащищенности и систем кодирования сигналов.
Заявляемый аппарат вертикального взлета и посадки может быть изготовлен на небольших производственных площадях с использованием современных материалов и технологий. При реализации изобретения могут использоваться различные конструктивные исполнения подъемно-маршевого модуля, модуля оборудования, управления и целевой нагрузки, а также виброгасящего шарнира и виброгасящей колонны, отличающиеся от описанных в данной заявке и приведенных на чертежах, иллюстрирующих изобретение, без отхода от идеологии и рамок настоящего изобретения, определяемых объемом притязаний, изложенных в формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕГКИЙ МНОГОРЕЖИМНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2007 |
|
RU2348568C1 |
| АВИАЦИОННАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ СПАСАТЕЛЬНЫХ РАБОТ | 2008 |
|
RU2381959C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2611480C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2014 |
|
RU2567496C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2598105C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2012 |
|
RU2518143C2 |
| МНОГОВИНТОВОЙ ТЯЖЕЛЫЙ КОНВЕРТОВИНТОКРЫЛ | 2013 |
|
RU2521121C1 |
| БЕСПИЛОТНЫЙ КОМБИНИРОВАННЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2629482C1 |
| БЕСПИЛОТНЫЙ ВИНТОКРЫЛ С ПЕРЕКРЕЩИВАЮЩИМИСЯ ВИНТАМИ | 2016 |
|
RU2627963C1 |
| МНОГОЦЕЛЕВОЙ МНОГОВИНТОВОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2010 |
|
RU2448869C1 |



Изобретение относится к авиации. Летательный аппарат состоит из двух имеющих единую вертикальную ось шарнирно соединенных подъемно-маршевого модуля с силовыми установками и несущими винтами и модуля оборудования, управления и целевой нагрузки, внутри которого установлена вертикально и закреплена в горизонтально расположенном силовом шпангоуте виброгасящая колонна. Подъемно-маршевый модуль оснащен двухстепенным виброгасящим шарниром, соединен с колонной и обеспечен возможностью быстрой замены в полевых условиях на модуль с большим или меньшим их количеством, пропорционально величине и назначению целевой нагрузки аппарата. Изобретение направлено на обеспечение более комфортных условий для работы целевой нагрузки. 5 ил.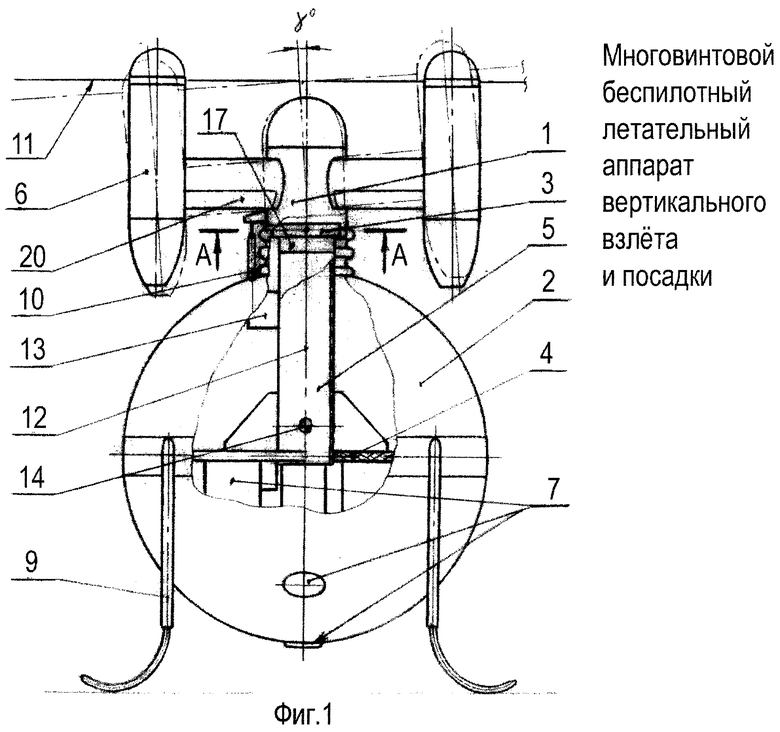
Многовинтовой беспилотный летательный аппарат вертикального взлета и посадки, отличающийся тем, что состоит из двух имеющих единую вертикальную ось шарнирно соединенных модулей: подъемно-маршевого с силовыми установками и несущими винтами и модуля оборудования, управления и целевой нагрузки, внутри которого установлена вертикально и закреплена в горизонтально расположенном силовом шпангоуте виброгасящая колонна, причем подъемно-маршевый модуль оснащен двухстепенным виброгасящим шарниром, соединен с колонной и обеспечен возможностью его быстрой замены в полевых условиях на модуль с большей или меньшей мощностью силовых установок, с большим или меньшим их количеством, пропорционально величине и назначению целевой нагрузки аппарата.
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| RU 2001836 C1, 30.10.1993 | |||
| Туннельная печь для термообработки марганец-цинковых ферритов | 1980 |
|
SU934169A1 |

