На сортировочных горках сортируют вагоны или группы вагонов, которые обычно называются спускаемыми вагонами, с использованием действующей на спускаемые вагоны силы тяжести с пути, лежащего на подъеме сортировочной горки, на различные сортировочные пути. При этом для обеспечения эффективности и надежности обычно осуществляется максимальная автоматизация работы сортировочной горки. Пригодная для этого автоматическая система управления известна, например, из публикации ”Automatisierungssystem fuer Zugbildungsanlagen MSR32 - Mehr Effizienz und Sicherheit im Gueterverkehr”, Bestell-Nr/: A19100-V100-B898-V1, Siemens AG 2010 («Система автоматизации для установок формирования поездов MSR32 - больше эффективности и надежности в грузовых перевозках», номер для заказа: A19100-V100-B898-V1, Сименс АГ, 2010). При этом осуществляется автоматическое оказание влияния на скорость спускаемых вагонов посредством соответствующего управления нижним замедлителем вагонов так, что скорость входа спускаемых вагонов в следующую ступень торможения в виде замедлителя вагонов сортировочного пути не превышает первое предельное значение. За счет этого обеспечивается, что с помощью расположенного в начале соответствующего сортировочного пути замедлителя вагонов сортировочного пути при всех обычно возникающих на практике обстоятельствах возможно достаточное торможение спускаемых вагонов.
В основе данного изобретения лежит задача создания способа работы сортировочной горки, который обеспечивает еще более далеко идущую автоматизацию работы сортировочной горки и связанное с этим в конечном итоге повышение производительности.
Эта задача решена, согласно изобретению, с помощью способа работы сортировочной горки, при этом в первом рабочем режиме управление нижним замедлителем вагонов выполняют так, что спускаемые вагоны в виде вагонов или групп вагонов достигают паркового замедлителя вагонов сортировочного пути с не достигающей первого порогового значения скоростью, переключают из первого рабочего режима во второй рабочий режим, если для одного спускаемого вагона определяют цель движения в или перед замедлителем вагонов сортировочного пути, и во втором рабочем режиме управляют нижним замедлителем вагонов так, что спускаемый вагон достигает определяемую цель движения в или перед замедлителем вагонов сортировочного пути с не достигающей второго порогового значения скоростью.
Таким образом, в соответствии с первой стадией способа, согласно изобретению, в первом рабочем режиме нижним замедлителем вагонов управляют так, что спускаемые вагоны достигают замедлитель вагонов соответствующего сортировочного пути с не достигающей первого порогового значения скоростью. Исходя из этого первого режима, затем в соответствии со второй стадией способа согласно изобретению выполняют переключение во второй рабочий режим в случае, когда цель движения определяют в или перед замедлителем вагонов сортировочного пути. Это означает, что уже перед фактическим достижением спускаемым вагоном нижнего замедлителя вагонов распознают, что спускаемый вагон не пройдет по меньшей мере частично замедлитель вагонов сортировочного пути в соответствии с планом. Это приводит к тому, что относительно соответствующего спускаемого вагона тормозное действие замедлителя вагонов сортировочного пути не имеется в распоряжении или имеется в распоряжении по меньшей мере не полностью для торможения спускаемого вагона.
Конкретно, указанный случай возникает на практике тогда, когда соответствующий сортировочный путь уже вплоть до замедлителя вагонов сортировочного пути заполнен вагонами, при этом между отдельными вагонами или группами вагонов могут иметься промежутки. При соответствующей степени заполнения сортировочного пути в обычном способе работы сортировочных горок не может больше обеспечиваться требуемое качество сортировки, то есть, в частности, предотвращение недопустимо высокой скорости столкновения спускаемых вагонов со стоящими вагонами. В этой ситуации до настоящего времени существует лишь возможность перемещения вручную других предназначенных для сортировочного пути спускаемых вагонов посредством свободной сортировки всего состава, который еще стоит на горке, в соответствующую зону. В качестве альтернативного решения возможно также, что оператор приводит в действие вручную ручной тормоз соответствующих вагонов и тем самым спускает вагоны на ручном тормозе. Однако в обоих случаях получаются значительные задержки и препятствия сортировки. Кроме того, относительно возможного торможения вагонов вручную следует учитывать, что, в частности, относительно новых грузовых вагонов это невозможно, поскольку подлежащие торможению вагоны не имеют ручного тормоза.
Для обеспечения возможности продолжения автоматической работы по спуску вагонов также при переполнении сортировочного пути в том отношении, что цель движения спускаемого вагона лежит в или же перед замедлителем вагонов сортировочного пути в соответствии с третьей стадией способа согласно изобретению управляют нижним замедлителем вагонов во втором рабочем режиме так, что спускаемый вагон достигает определяемой цели движения в или перед замедлителем вагонов сортировочного пути с меньшей второго порогового значения скоростью. Это означает, что в отличие от первого рабочего режима, управление нижним замедлителем вагонов выполняют так, что торможение происходит относительно соответствующей цели движения, а не относительно соответствующего замедлителя вагонов сортировочного пути.
Кроме того, при этом управление нижним замедлителем вагонов, соответственно, оказывает влияние на скорость спускаемого вагона с помощью нижнего замедлителя вагонов так, что спускаемый вагон достигает определяемую цель движения с не достигающей второго порогового значения скоростью. При этом второе пороговое значение может обычно составлять примерно 1,5 м/с, поскольку это является обычной целевой скоростью для столкновения спускаемого вагона со стоящим вагоном. В противоположность этому, первое пороговое значение в первом рабочем режиме обычно составляет примерно 4 м/с, поскольку это является обычным на практике значением допустимой скорости входа в замедлитель вагонов сортировочного пути.
В соответствии с этим способ согласно изобретению отличается уже тем, что автоматическая работа сортировочной горки допустима также в случае, когда сортировочный путь в соответствующем замедлителе вагонов сортировочного пути или и за ним заполнен. В целом не только допускается заполнение, соответственно, использование этой зоны, но дополнительно к этому за счет переключения из первого рабочего режима во второй рабочий режим и измененного управления нижним замедлителем вагонов во втором рабочем режиме, обеспечивается возможность продолжения автоматической работы сортировочной горки. В результате это приводит к тому, что с помощью установки для сортировки, соответственно, составления составов можно в автоматическом режиме создавать составы, длина которых превышает полезную длину соответствующего сортировочного пути, так что образованная отдельными спускаемыми вагонами колонна вагонов проходит в зону замедлителя вагонов сортировочного пути или же в зону перед замедлителем вагонов сортировочного пути, т.е. между нижним замедлителем вагонов и замедлителем вагонов сортировочного пути. За счет того, что при этом обеспечивается требуемое качество сортировки, то в конечном итоге достигается общее повышение производительности сортировочной горки и тем самым улучшение эффективности сортировочной работы.
Следует отметить, что способ согласно изобретению выполняется, как правило, конкретно для соответствующего сортировочного пути в том отношении, что переключение из первого рабочего режима во второй рабочий режим выполняют конкретно для соответствующего сортировочного пути. Это означает, что предназначенные для полностью заполненного сортировочного пути спускаемые вагоны обрабатывают так, что в соответствии со вторым рабочим режимом управляют нижним замедлителем вагонов так, что спускаемый вагон достигает определяемую цель движения в или перед замедлителем вагонов сортировочного пути с меньшей второго порогового значения скоростью. В противоположность этому, те спускаемые вагоны, которые предназначены для другого, еще не полностью заполненного сортировочного пути, обрабатывают в соответствии с первым рабочим режимом так, что нижним замедлителем вагонов управляют так, что спускаемые вагоны достигают соответствующий замедлитель вагонов сортировочного пути с меньшей первого порогового значения скоростью.
Кроме того, следует отметить, что нижний замедлитель вагонов, а также замедлитель вагонов сортировочного пути могут быть выполнены каждый в виде отдельного тормозного элемента или же в виде нескольких тормозных элементов, т.е. в виде тормозной ступени.
В соответствии с одной особенно предпочтительной модификацией способа согласно изобретению переключение из первого рабочего режима во второй рабочий режим выполняют, если для спускаемого вагона с учетом прогноза степени заполнения сортировочного пути и/или списка формирования цель движения определяется в или перед замедлителем вагонов сортировочного пути. Это обеспечивает то преимущество, что можно своевременно распознавать заполнение соответствующего сортировочного пути в лежащей в или перед замедлителем вагонов сортировочного пути зоне. За счет этого обеспечивается своевременное переключение из первого рабочего режима во второй рабочий режим сортировочной горки. При этом в прогнозе степени заполнения сортировочного пути можно учитывать, в частности, также измерительную информацию установленных в сортировочном пути или в зоне сортировочного пути датчиков. Соответствующими датчиками могут быть, например, рельсовые контуры тока для измерения свободной длины пути, колесные датчики для определения состояния занятости участков пути или же радарные датчики для измерения расстояний. Список формирования обычно составляется службой учета и может содержать, наряду с данными цели соответствующего спускаемого вагона, соответственно, сортировочного пути, для которого предназначен спускаемый вагон, также, например, информацию о типе и длине отдельных вагонов. В частности, из комбинации прогноза степени заполнения сортировочного пути с информацией списка формирования можно сравнительно точно и своевременно распознавать переполнение, соответственно, намечающееся переполнение сортировочного пути.
В соответствии с другим особенно предпочтительным вариантом выполнения способ согласно изобретению выполняют так, что во втором рабочем режиме нижним замедлителем вагонов управляют так, что спускаемые вагоны тормозятся до более низкой по сравнению с первым рабочим режимом скорости выхода из нижнего замедлителя вагонов. В принципе, управление нижним замедлителем вагонов во втором рабочем режиме направлено на обеспечении достижения соответствующим спускаемым вагоном определяемой цели движения в или перед замедлителем вагонов сортировочного пути с не достигающей второго порогового значения скоростью. Однако по сравнению с первым рабочим режимом это приводит, как правило, к тому, что во втором рабочем режиме скорость выхода из нижнего замедлителя вагонов ниже, чем в первом рабочем режиме. Так, скорость спускаемых вагонов в зоне после нижнего замедлителя вагонов во втором рабочем режиме, как правило, составляет от примерно 1,5 м/с до примерно 2 м/с, в то время как в первом рабочем режиме скорость спускаемых вагонов в этой зоне составляет, как правило, по меньшей мере примерно 3,5 м/с.
Предпочтительно способ согласно изобретению можно выполнять так, что во втором рабочем режиме нижним замедлителем вагонов управляют так, что другие предназначенные для сортировочного пути спускаемые вагоны достигают конкретно определяемую для соответствующего другого спускаемого вагона цель движения с не достигающей второго порогового значения скоростью. Это означает, что во втором рабочем режиме конкретно для каждого спускаемого вагона определяют цель движения и эту цель движения учитывают при управлении нижним замедлителем вагонов. При этом цель движения, которую можно называть также целевой точкой, смещается за счет спуска других предназначенных для сортировочного пути спускаемых вагонов все дальше в направлении сортировочной горки, т.е. в направлении нижнего замедлителя вагонов. При этом соответствующую цель движения можно определять, например, тем, что, исходя из прогноза степени заполнения сортировочного пути, соответственно, информации, что он занят вплоть до замедлителя вагонов сортировочного пути, суммируют длины следующих спускаемых вагонов и тем самым конкретно, соответственно, по отдельности вычисляют цель движения для каждого другого предназначенного для соответствующего сортировочного пути спускаемого вагона.
Предпочтительно способ согласно изобретению выполняют, кроме того, так, что во втором рабочем режиме нижним замедлителем вагонов управляют с учетом конкретных для соответствующего спускаемого вагона данных сортировки. Это является предпочтительным, поскольку конкретные данные спускаемого вагона, такие как, например, вес или сопротивление качения спускаемого вагона, во втором рабочем режиме при их учете обеспечивают возможность особенно точного и надежного управления нижним замедлителем вагонов и тем самым в конечном итоге всей сортировочной горкой.
В соответствии с другой особенно предпочтительной модификацией способ согласно изобретению выполняют так, что во втором рабочем режиме сортировочной горкой управляют так, что спускаемый вагон, следующий за спускаемым вагоном, для которого определена цель движения в или перед замедлителем вагонов сортировочного пути, сохраняет от этого спускаемого вагона пространственный и/или временной минимальный интервал. В соответствии с этим во втором рабочем режиме предназначенные для соответствующего сортировочного пути спускаемые вагоны, как правило, имеют после нижнего замедлителя вагонов меньшую скорость, чем те спускаемые вагоны, которые предназначены для другого, еще не полностью заполненного сортировочного пути. Таким образом, для надежного предотвращения недопустимых столкновений следующих друг за другом спускаемых вагонов, например, в виде так называемых угловых ударов, необходимо во втором рабочем режиме управлять сортировочной горкой так, что спускаемый вагон, который следует за спускаемым вагоном, который предназначен для полностью заполненного сортировочного пути, сохраняет от этого спускаемого вагона пространственный и/или временной минимальный интервал. Таким образом, можно автоматически тормозить все спускаемые вагоны с помощью нижнего замедлителя вагонов, при этом одновременно выдерживается требуемое качество сортировки. Вплоть до момента времени, в который вагоны заполненного за замедлитель вагонов сортировочного пути достигают контакт предельного столбика последней распределительной стрелки, тем самым в отношении использования других сортировочных путей не возникает никаких ограничений сортировочной работы. Однако, начиная с этого момента времени, отдельные сортировочные пути могут больше не находиться в распоряжении, поскольку соответствующие распределительные стрелки блокированы вагонами образованного на переполненном сортировочном пути состава. Однако независимо от этого следует отметить, что с точки зрения техники управления с помощью способа, согласно изобретению, можно образовывать составы вплоть до зоны выхода из нижнего замедлителя вагонов.
Предпочтительно способ согласно изобретению можно также выполнять так, что управление сортировочной горкой содержит управление скоростью толкания спускаемых вагонов. При этом, например, возможно, что для выдерживания расстояния между медленно движущимся спускаемым вагоном, который предназначен для переполненного сортировочного пути, и следующим, предназначенным для другого сортировочного пути спускаемым вагоном, посредством нового расчета имитации спуска вычисляют оптимальную скорость спуска для спускаемых вагонов. При этом может быть необходимо спускать соответствующий медленный спускаемый вагон отдельно с сортировочной горки, т.е. без одновременного спуска других спускаемых вагонов. В этом случае для следующего спускаемого вагона можно при необходимости останавливать состав на горке и лишь после времени ожидания продолжать процесс сортировки посредством автоматического запуска толкающего локомотива. Это предпочтительно в особенности, когда в противном случае скорость становится меньше минимальной скорости, с которой может двигаться толкающий локомотив. Управление скоростью толкания можно осуществлять посредством автоматического управления локомотивом, т.е. посредством прямого воздействия на управление приводом толкающего локомотива. Кроме того, возможно также, что заданная скорость толкания передается в толкающий локомотив. В этом случае заданная скорость толкания может учитываться в одном из компонентов управления толкающим локомотивом, или же, если толкание осуществляется вручную машинистом локомотива, выводиться на индикаторное устройство толкающего локомотива. Кроме того, управление скоростью толкания возможно также посредством установки сигнала толкания на стоп.
Относительно устройства управления, в основу данного изобретения положена задача создания управляющего устройства для сортировочной горки, которое поддерживает способ работы сортировочной горки, который обеспечивает дальнейшую автоматизацию работы сортировочной горки и связанное с этим в конечном итоге повышение ее производительности.
Эта задача решена согласно изобретению с помощью управляющего устройства для сортировочной горки, при этом управляющее устройство выполнено так, что в первом рабочем режиме управление нижним замедлителем вагонов осуществляется так, что спускаемые вагоны в виде спускаемых вагонов или групп вагонов достигают паркового замедлителя вагонов сортировочного пути с не достигаемой первого порогового значения скоростью, осуществляется переключение из первого рабочего режима во второй рабочий режим, если для спускаемого вагона определяется цель движения в или перед замедлителем вагонов сортировочного пути, и во втором рабочем режиме управление нижним замедлителем вагонов осуществляется так, что спускаемый вагон достигает определяемую цель движения в или перед замедлителем вагонов сортировочного пути с не достигающей второго порогового значения скоростью.
Преимущества управляющего устройства согласно изобретению соответствуют преимуществам способа, согласно изобретению, так что в этом отношении делается ссылка на приведенные выше пояснения. Это же относится к указанным ниже предпочтительным модификациям управляющего устройства согласно изобретению относительно соответствующих предпочтительных модификаций способа, согласно изобретению, так что также в этом отношении делается ссылка на соответствующие приведенные выше пояснения.
Предпочтительно управляющее устройство, согласно изобретению, модифицировано так, что переключение из первого рабочего режима во второй рабочий режим осуществляется, если для спускаемого вагона с учетом прогноза состояния заполнения сортировочного пути и/или списка формирования определяется цель движения в или перед замедлителем вагонов сортировочного пути.
Согласно другому предпочтительному варианту выполнения управляющее устройство согласно изобретению выполнено так, что во втором рабочем режиме управление нижним замедлителем вагонов осуществляется так, что спускаемые вагоны тормозятся до меньшей по сравнению с первым рабочим режимом скорости выхода из нижнего замедлителя вагонов.
Предпочтительно управляющее устройство согласно изобретению может быть выполнено так, что во втором рабочем режиме управление нижним замедлителем вагонов осуществляется так, что другие предназначенные для сортировочного пути спускаемые вагоны достигают определяемую конкретно для соответствующего другого спускаемого вагона цель движения с не достигающей второго порогового значения скоростью.
Согласно другому предпочтительному варианту выполнения управляющее устройство согласно изобретению выполнено так, что во втором рабочем режиме управление нижним замедлителем вагонов осуществляется с учетом конкретных для соответствующего спускаемого вагона данных сортировки.
Управляющее устройство, согласно изобретению, может быть также предпочтительно модифицировано так, что во втором рабочем режиме управление сортировочной горкой осуществляется так, что спускаемый вагон, который следует за спускаемым вагоном, для которого цель движения определена в или перед замедлителем вагонов сортировочного пути, сохраняет пространственный и/или временной минимальный интервал относительно этого спускаемого вагона.
Предпочтительно управляющее устройство согласно изобретению при этом дополнительно модифицировано так, что управление сортировочной горкой содержит управление скоростью толкания спускаемых вагонов.
Кроме того, изобретение относится к сортировочной горке, содержащей управляющее устройство, согласно изобретению, соответственно, управляющее устройство, согласно указанным выше предпочтительным модификациям управляющего устройства, согласно изобретению.
Ниже приводится более подробное пояснение изобретения на основании примеров выполнения со ссылками на прилагаемый чертеж, на котором изображено:
фигура - схема примера выполнения сортировочной горки.
На фигуре показана сортировочная горка 10. При этом в верхней части фигуры показаны пути сортировочной горки 10, а в нижней части - профиль, соответственно, продольный разрез сортировочной горки 10.
Как показано на фигуре, сортировочная горка 10, которая является составляющей частью системы для сортировки рельсовых транспортных средств, имеет скоростной уклон 20, к которому примыкают промежуточный уклон 30, имеющая распределительные стрелки 80-86 распределительная зона 40, а также сортировочные пути 50-57. Кроме того, на фигуре показаны замедлители вагонов в виде нижних замедлителей 60, 61 вагонов и замедлителей 70-77 вагонов сортировочных путей.
Наряду с указанными компонентами сортировочной горки 10 на фигуре показаны в качестве примера спускаемые вагоны 100 и 101, которые толкаются, соответственно, спускаются с ускорительного уклона с помощью толкающего локомотива 110, и затем под действием силы тяжести перемещаются по сортировочной горке 10.
В рамках дальнейшего описания принимается, что сортировочный путь 50 уже заполнен подлежащими формированию в состав вагонами настолько, что для также предназначенного для сортировочного пути 50 спускаемого вагона 100 на основании существующего состояния заполнения сортировочного пути 50 цель движения определяется так, что спускаемый вагон 100 планомерно останавливается перед проходом полностью через замедлитель 70 вагонов сортировочного пути. Другими словами, на сортировочном пути 50 в зоне позади, т.е. справа от замедлителя 70 вагонов сортировочного пути, нет больше достаточного места для спускаемого вагона 100. Это приводит к тому, что относительно спускаемого вагона 100 нижний замедлитель 60 вагонов не может больше оказывать обычного влияния на его скорость так, что спускаемые вагоны достигают замедлитель 70 вагонов сортировочного пути с не достигающей первого порогового значения скоростью, которая может составлять, например, 4 м/с. А именно, при обработке спускаемого вагона 100 в первом рабочем режиме это приводило бы к тому, что спускаемый вагон 100 сталкивался с последним стоящим на сортировочном пути 50 вагоном со скоростью, которая больше максимально допустимой скоростью столкновения, которая составляет обычно примерно 1,5 м/с.
Для обеспечения также в этой ситуации возможности автоматического, эффективного и надежного управления сортировочной горкой 10, соответственно, ее нижним замедлителем 70 вагонов, в указанной ситуации осуществляется переключение с первого рабочего режима во второй рабочий режим. При этом второй рабочий режим характеризуется тем, что нижним замедлителем 60 вагонов управляют так, что спускаемый вагон 100 достигает определяемую цель движения в или перед замедлителем 70 вагонов сортировочного пути с не достигающей второго порогового значения скоростью, т.е., например, со скоростью меньше 1,5 м/с. За счет этого предпочтительно обеспечивается возможность оказания влияния на скорость спускаемого вагона 100 с помощью нижнего замедлителя 70 вагонов также в случае, когда сортировочный путь 50 уже заполнен вплоть до замедлителя 70 вагонов сортировочного пути или же и дальше его.
Конкретно в показанном на фигуре примере выполнения при этом можно заполнять сортировочный путь 50 за замедлителем 70 вагонов сортировочного пути в распределительной зоне 40. При этом это возможно вплоть до контакта предельного столбика последней распределительной стрелки 82, без ограничения тем самым доступности других сортировочных путей, в частности сортировочного пути 51. Если допустимо ограничения доступности других сортировочных путей 51-57, то с точки зрения управления в принципе можно дополнительно к собственно сортировочному пути 50 использовать всю распределительную зону 40 вплоть до выхода из нижнего замедлителя 70 вагонов для формирования состава.
Переключение из первого рабочего режима во второй рабочий режим происходит предпочтительно с учетом прогноза состояния заполнения путей, а также списка формирования, которые применяются при распознавании намечающегося переполнения сортировочного пути 50, а также при определении цели движения.
Если спускаемый вагон 101 также предназначен для сортировочного пути 50, то во втором рабочем режиме управление нижним замедлителем 70 вагонов осуществляется так, что определяемая конкретно для другого спускаемого вагона 101 цель движения достигается этим спускаемым вагоном с не достигающей второго порогового значения скоростью. При этом при определении цели движения для спускаемого вагона 101 предпочтительно учитывается, что сортировочный путь 50 уже заполнен вплоть до замедлителя 70 вагонов сортировочного пути и что дополнительно к этому спускаемый вагон 100 находится в соприкосновении с концом стоящей на сортировочном пути 50 колонны вагонов. Таким образом, цель движения за счет спуска других спускаемых вагонов смещается все дальше в направлении сортировочной горки, т.е. в направлении нижнего замедлителя 60 вагонов.
Соответствующее суммирование длин следующих спускаемых вагонов может осуществляться так же, как управление нижними замедлителями 60, 61 вагонов, с помощью управляющего устройства 200, которое через линии 210, 211 связи, которые могут быть также беспроводными или проводными, соединено с нижними замедлителями 60, 61 вагонов. При этом управляющее устройство 200 может быть, с одной стороны, центральным управляющим устройством сортировочной горки 10. С другой стороны, возможно также, что сортировочная горка 10 имеет распределенную систему управления, и управляющее устройство 200 внутри этой распределенной системы управления выполняет, например, функцию управления нижними замедлителями вагонов. Независимо от этого, управляющее устройство 200 имеет как компоненты аппаратного обеспечения, например, в виде процессоров и запоминающих средств, так и в виде программного кода.
Наряду с учетом соответствующей цели движения, во втором рабочем режиме управление нижним замедлителем 60 вагонов предпочтительно осуществляется с учетом конкретных для каждого спускаемого вагона 100, 101 данных сортировки. При этом данные сортировки могут как поставляться службой учета, так и измеряться, соответственно, определяться с помощью датчиков сортировочной горки 10.
В случае, когда спускаемый вагон 101 предназначен не для сортировочного пути 50, а, например, для сортировочного пути 52, то управление спускаемым вагоном 101 с помощью нижнего замедлителя 60 вагонов, а также замедлителя вагонов 72 сортировочного пути можно в принципе осуществлять в соответствии с первым рабочим режимом так, что он достигает замедлитель 72 вагонов сортировочного пути 52 с не достигающей первого порогового значения скоростью. Это означает, что переключение между первым рабочим режимом и вторым рабочим режимом принципиально относится исключительно к соответствующему сортировочному пути, соответственно, к соответствующему замедлителю вагонов сортировочного пути.
Поскольку спускаемый вагон 101 в этом случае без дополнительных мер будет иметь в распределительной зоне 40 более высокую скорость, чем спускаемый вагон 100, то при этом следует, однако, обеспечивать, что во втором рабочем режиме управление сортировочной горкой 10 осуществляется так, что спускаемый вагон 101, который следует за спускаемым вагоном 100, для которого цель движения определена в или перед замедлителем 70 вагонов сортировочного пути 50, сохраняет от этого спускаемого вагона 100 пространственный и/или временной минимальный интервал. Это означает, что на основании относящегося к сортировочному пути 50 переключения во второй рабочий режим, может осуществляться также относительно предназначенного для сортировочного пути 52 спускаемого вагона 101 измененное управление скоростью, соответственно, торможением. При этом соответствующее управление сортировочной горкой 10 может содержать, в частности, управление скоростью толкания спускаемого вагона 101. Так, например, возможно, что после переключения из первого рабочего режима во второй рабочий режим вновь выполняется расчет имитации спуска и вычисляется измененная оптимальная скорость толкания для другого спускаемого вагона 101. При этом в зависимости от соответствующих обстоятельств и минимальной скорости движения толкающего локомотива 110 может быть необходимо сначала останавливать другой спускаемый вагон 101 на горке, и лишь затем автоматически запускать снова режим толкания после времени ожидания, пока спускаемый вагон 100 не освободит предельный столбик распределительной стрелки 81.
Следует отметить, что, как правило, наряду с нижними замедлителями 60 и 61 вагонов, с управляющим устройством 200 могут быть связаны другие компоненты, которые не показаны на фигуре по причинам сохранения наглядности. Это относится, в частности, к компонентам для сигнализации освобождения участков пути сортировочной горки 10, датчикам для определения степени, соответственно, состояния заполнения сортировочных путей 50-57, а также к расположенным в зоне сортировочной горки датчикам для измерения длины и веса спускаемых вагонов.
В соответствии с приведенными выше пояснениями, примеры выполнения способа, согласно изобретению, описание которых приведено со ссылками на фигуру, а также управляющее устройство, согласно изобретению, имеют, в частности, то преимущество, что обеспечивается возможность автоматического, эффективного и надежного заполнения сортировочных путей 50-57 также вплоть до замедлителей 70-77 вагонов сортировочных путей, соответственно, за ними в распределительной зоне 40. За счет этого можно также для составов, которые относительно своей длины превосходят полезную длину сортировочных путей 50-57, которая предпочтительно ограничивается в направлении сортировочной горки соответствующим замедлителем 70-77 вагонов сортировочных путей, осуществлять автоматическое формирование составов, за счет чего в конечном итоге повышается эффективность и пропускная способность сортировочной горки 10.
Изобретение относится к способу работы сортировочной горки (10). При этом в первом рабочем режиме управление нижним замедлителем (60) вагонов выполняют так, что спускаемые вагоны (100, 101) в виде вагонов или групп вагонов достигают замедлитель (70) вагонов сортировочного пути (50) с не достигающей первого порогового значения скоростью. Переключают из первого рабочего режима во второй рабочий режим, если для одного спускаемого вагона (100) определяют цель движения в или перед замедлителем (70) вагонов сортировочного пути (50). Во втором рабочем режиме управляют нижним замедлителем (60) вагонов так, что спускаемый вагон (100) достигает определяемую цель движения в или перед замедлителем (70) вагонов сортировочного пути с не достигающей второго порогового значения скоростью. Кроме того, изобретение относится к управляющему устройству (200) для сортировочной горки (10), а также к сортировочной горке, содержащей упомянутое управляющее устройство. В результате повышается автоматизация и, следовательно, производительность работы сортировочной горки. 3 н. и 20 з.п. ф-лы, 1 ил.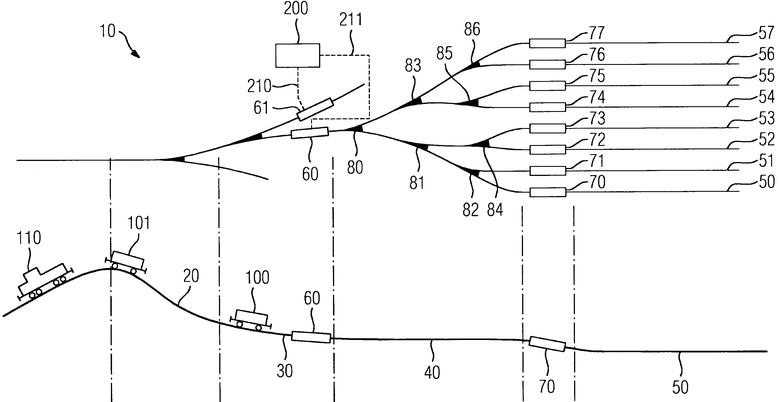
1. Способ работы сортировочной горки (10), при этом
- в первом рабочем режиме управление нижним замедлителем (60) вагонов выполняют так, что спускаемые вагоны (100, 101) в виде вагонов или групп вагонов достигают паркового замедлителя (70) вагонов сортировочного пути (50) с не достигающей первого порогового значения скоростью,
- переключают из первого рабочего режима во второй рабочий режим, если для спускаемого вагона (100) определяют цель движения в или перед замедлителем (70) вагонов сортировочного пути (50), и
- во втором рабочем режиме управляют нижним замедлителем (60) вагонов так, что спускаемый вагон (100) достигает определяемую цель движения в или перед паркового замедлителем (70) вагонов сортировочного пути с не достигающей второго порогового значения скоростью.
2. Способ по п.1, отличающийся тем, что переключение из первого рабочего режима во второй рабочий режим выполняют, если для спускаемого вагона (100) с учетом прогноза степени заполнения сортировочного пути и/или списка формирования определяется цель движения в или перед замедлителем (70) вагонов сортировочного пути (50).
3. Способ по п.1, отличающийся тем, что во втором рабочем режиме нижним замедлителем (60) вагонов управляют так, что спускаемые вагоны (100, 101) тормозятся до более низкой по сравнению с первым рабочим режимом скорости выхода из нижнего замедлителя (60) вагонов.
4. Способ по п.2, отличающийся тем, что во втором рабочем режиме нижним замедлителем (60) вагонов управляют так, что спускаемые вагоны (100, 101) тормозятся до более низкой по сравнению с первым рабочим режимом скорости выхода из нижнего замедлителя (60) вагонов.
5. Способ по п.1, отличающийся тем, что во втором рабочем режиме нижним замедлителем (60) вагонов управляют так, что другие предназначенные для сортировочного пути (50) спускаемые вагоны (50) достигают конкретно определяемую для соответствующего другого спускаемого вагона (101) цель движения с не достигающей второго порогового значения скоростью.
6. Способ по п.2, отличающийся тем, что во втором рабочем режиме нижним замедлителем (60) вагонов управляют так, что другие предназначенные для сортировочного пути (50) спускаемые вагоны (50) достигают конкретно определяемую для соответствующего другого спускаемого вагона (101) цель движения с не достигающей второго порогового значения скоростью.
7. Способ по п.3, отличающийся тем, что во втором рабочем режиме нижним замедлителем (60) вагонов управляют так, что другие предназначенные для сортировочного пути (50) спускаемые вагоны (50) достигают конкретно определяемую для соответствующего другого спускаемого вагона (101) цель движения с не достигающей второго порогового значения скоростью.
8. Способ по п.4, отличающийся тем, что во втором рабочем режиме нижним замедлителем (60) вагонов управляют так, что другие предназначенные для сортировочного пути (50) спускаемые вагоны (50) достигают конкретно определяемую для соответствующего другого спускаемого вагона (101) цель движения с не достигающей второго порогового значения скоростью.
9. Способ по любому из пп.1-8, отличающийся тем, что во втором рабочем режиме нижним замедлителем (60) вагонов управляют с учетом конкретных для соответствующего спускаемого вагона (100, 101) данных сортировки.
10. Способ по любому из пп.1-8, отличающийся тем, что во втором рабочем режиме сортировочной горкой (10) управляют так, что спускаемый вагон (101), следующий за спускаемым вагоном (100), для которого определена цель движения в или перед замедлителем (70) вагонов сортировочного пути (50), сохраняет от этого спускаемого вагона (100) пространственный и/или временной минимальный интервал.
11. Способ по п.10, отличающийся тем, что управление сортировочной горкой (10) содержит управление скоростью толкания спускаемых вагонов (100, 101).
12. Управляющее устройство (200) для сортировочной горки (10), при этом управляющее устройство (200) выполнено так, что
- в первом рабочем режиме управление нижним замедлителем (60) вагонов осуществляется так, что спускаемые вагоны (100, 101) в виде спускаемых вагонов или групп вагонов достигают паркового замедлителя (70) вагонов сортировочного пути (50) с не достигающей первого порогового значения скоростью,
- осуществляется переключение из первого рабочего режима во второй рабочий режим, если для спускаемого вагона (100) определяется цель движения в или перед замедлителем (70) вагонов сортировочного пути (50), и
- во втором рабочем режиме управление нижним замедлителем (60) вагонов осуществляется так, что спускаемый вагон (100) достигает определяемую цель движения в или перед замедлителем (70) вагонов сортировочного пути с не достигающей второго порогового значения скоростью.
13. Управляющее устройство по п.12, отличающееся тем, что управляющее устройство (200) выполнено так, что переключение из первого рабочего режима во второй рабочий режим осуществляется, если для спускаемого вагона (100) с учетом прогноза состояния заполнения сортировочного пути и/или списка формирования определяется цель движения в или перед замедлителем (70) вагонов сортировочного пути (50).
14. Управляющее устройство по п.12, отличающееся тем, что управляющее устройство (200) выполнено так, что во втором рабочем режиме управление нижним замедлителем (60) вагонов осуществляется так, что спускаемые вагоны (100, 101) тормозятся до меньшей по сравнению с первым рабочим режимом скорости выхода из нижнего замедлителя (60) вагонов.
15. Управляющее устройство по п.13, отличающееся тем, что управляющее устройство (200) выполнено так, что во втором рабочем режиме управление нижним замедлителем (60) вагонов осуществляется так, что спускаемые вагоны (100, 101) тормозятся до меньшей по сравнению с первым рабочим режимом скорости выхода из нижнего замедлителя (60) вагонов.
16. Управляющее устройство по п.12, отличающееся тем, что управляющее устройство (200) выполнено так, что во втором рабочем режиме управление нижним замедлителем (60) вагонов осуществляется так, что другие предназначенные для сортировочного пути (50) спускаемые вагоны (101) достигают определяемую конкретно для соответствующего другого спускаемого вагона (101) цель движения с не достигающей второго порогового значения скоростью.
17. Управляющее устройство по п.13, отличающееся тем, что управляющее устройство (200) выполнено так, что во втором рабочем режиме управление нижним замедлителем (60) вагонов осуществляется так, что другие предназначенные для сортировочного пути (50) спускаемые вагоны (101) достигают определяемую конкретно для соответствующего другого спускаемого вагона (101) цель движения с не достигающей второго порогового значения скоростью.
18. Управляющее устройство по п.14, отличающееся тем, что управляющее устройство (200) выполнено так, что во втором рабочем режиме управление нижним замедлителем (60) вагонов осуществляется так, что другие предназначенные для сортировочного пути (50) спускаемые вагоны (101) достигают определяемую конкретно для соответствующего другого спускаемого вагона (101) цель движения с не достигающей второго порогового значения скоростью.
19. Управляющее устройство по п.15, отличающееся тем, что управляющее устройство (200) выполнено так, что во втором рабочем режиме управление нижним замедлителем (60) вагонов осуществляется так, что другие предназначенные для сортировочного пути (50) спускаемые вагоны (101) достигают определяемую конкретно для соответствующего другого спускаемого вагона (101) цель движения с не достигающей второго порогового значения скоростью.
20. Управляющее устройство по любому из пп.12-19, отличающееся тем, что управляющее устройство (200) выполнено так, что во втором рабочем режиме управление нижним замедлителем (60) вагонов осуществляется с учетом конкретных для соответствующего спускаемого вагона (100, 101) данных сортировки.
21. Управляющее устройство по любому из пп.12-19, отличающееся тем, что управляющее устройство (200) выполнено так, что во втором рабочем режиме управление сортировочной горкой (10) осуществляется так, что спускаемый вагон (101), который следует за спускаемым вагоном (100), для которого цель движения определена в или перед замедлителем (70) вагонов сортировочного пути (50), сохраняет пространственный и/или временной минимальный интервал относительно этого спускаемого вагона (100).
22. Управляющее устройство по п.21, отличающееся тем, что управляющее устройство (200) выполнено так, что управление сортировочной горкой (10) содержит управление скоростью толкания спускаемых вагонов (100, 101).
23. Сортировочная горка, содержащая управляющее устройство по любому из пп.12-22.
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНЫХ ГОРКАХ | 1990 |
|
RU2034730C1 |

