На маневровых сортировочных горках вагоны или группы вагонов, называемые также отцепами, за счет действующей на отцепы силы тяжести сортируют с пути на возвышенности на различно-направленные сортировочные пути. Для обеспечения эффективности и надежности на сортировочных горках, как правило, в значительной степени автоматизируют процесс работы. Предназначенное для этих целей автоматизированное устройство управления известно, например, из опубликованного фирмой документа «Система Trackguard® Cargo MSR32 автоматизации формирования поездов – больше эффективности и безопасности грузоперевозок», Кат.-№ А19100-V100-B981, Сименс АГ 2014 г.
Принципиально при эксплуатации сортировочной горки необходимо максимально точное прогнозирование характера движения отцепов. С одной стороны это необходимо для того, чтобы отцепы не нагоняли друг друга во время их движения в направлении сортировочных путей, так как это может привести к авариям или повреждению отцепов или перевозимых грузов. Максимально точное прогнозирование характера движения отдельных отцепов обеспечивает также возможность максимального повышения производительности сортировочной горки, т.е. максимального увеличения количества вагонов, сортируемых за определенное время.
Важнейшим параметром при управлении сортировочной горкой является действующее на отцепы сопротивление от кривизны пути. Сопротивление от кривизны пути – это сопротивление трения, возникающее при движении рельсового транспорта по кривой. Причиной этого является то, что на кривой, колесо на наружной дуге кривой проходит большее расстояние, чем колесо на внутренней дуге кривой. Из-за жесткого соединения колес на одной оси у рельсового транспорта оба колеса движутся с одинаковой окружной скоростью. Определенную разницу в пути можно нивелировать конусностью рабочей поверхности колеса, однако на малых радиусах разница в пути между наружным и внутренним рельсом такова, что ее можно компенсировать только движением скольжения. Возникающее при этом трение вызывает торможение соответствующего транспортного средства и, тем самым, изменение хода движения.
Из-за топологии путей на сортировочной горке технической ранжировки, называемой также устройством для формирования поездов, сопротивление от кривизны пути оказывает значительно влияние на свободное движение отцепов. Следовательно, определение и прогнозирование сопротивления от кривизны важно для эффективного управления путевыми замедлителями для регулирования скорости отцепов. При этом необходимо учитывать, что возникающее сопротивление от кривизны можно использовать и для определения и прогнозирования действующего на отцепы сопротивления качения. В результате пропускная способность и качество ранжировки соответствующих сортировочных горок непосредственно или опосредовано зависят от точности определения сопротивления от кривизны пути. Если пропускную способность горки определяет главным образом количество сортируемых за заданное время отцепов, то качество сортировки зависит, в частности, от надежности предотвращения угловых наездов и наката отцепов с недопустимо высокой скоростью.
В основе данного изобретения лежит задача создать способ эксплуатации маневровой сортировочной горки, обеспечивающий возможность повышения пропускной способности и/или качества ранжировки сортировочной горки путем более эффективного определения сопротивления от кривизны пути.
Согласно изобретению, эту задачу решают посредством способа эксплуатации маневровой сортировочной горки, причем для соответствующих отцепов в виде вагонов или групп вагонов олпределяют, по меньшей мере, одно значение сопротивления от крутизны, по меньшей мере, на одной кривой на пути соответствующего отцепа с учетом, по меньшей мере, ходовой части соответствующего отцепа и управляют, по меньшей мере, одним путевым замедлителем сортировочной горки с учетом, по меньшей мере, одного определенного параметра сопротивления от крутизны пути.
Согласно первому этапу способа, по данному изобретению, способ отличается в первую очередь тем, что для схода соответствующих вагонов или групп вагонов определяют, по меньшей мере, один параметр сопротивления от крутизны, по меньшей мере, на одной кривой пути соответствующего отцепа с учетом, по меньшей мере, типа ходовой тележки соответствующего отцепа. При этом определение, по меньшей мере, одного параметра сопротивления от крутизны, по меньшей мере, одной кривой на пути соответствующего отцепа принципиально возможно как в момент, когда соответствующий отцеп уже достиг или прошел эту кривую, так и в момент, когда соответствующий отцеп еще не достиг этой кривой. В обоих случаях обеспечена, в частности, возможность спрогнозировать характер предстоящего движения соответствующего отцепа на основе определенного, по меньшей мере, одного параметра сопротивления от крутизны пути.
Согласно изобретению, по меньшей мере, один параметр сопротивления от крутизны пути, по меньшей мере, одной кривой на пути соответствующего отцепа определяют с учетом, по меньшей мере, типа ходовой тележки соответствующего отцепа. Если отцеп состоит только из одного вагона, то учитываемый тип ходовой тележки - это тип тележки этого вагона. Если соответствующий отцеп состоит из нескольких вагонов, то учитываемый тип ходовой тележки в зависимости от состава отцепа может быть одним типом или несколькими типами соответствующих вагонов. Под ходовой тележкой в рамках данного описания следует понимать согласно обычному значению компонент рельсового транспортного средства, ведущий рельсовое транспортное средство по ж/д-пути и передающий возникающие между путем и транспортным средством силовые воздействия. Ходовые тележки включают, как правило, колесные пары, подшипники колесных пар, а также рессоры. Так как на маневровых сортировочных горках у сортируемых товарных вагонов, как правило, отсутствует собственный привод, ходовые тележки отцепов оборудованы, как правило, исключительно неприводными осями. Примером распространенных в Европе ходовых тележек служит, например, тележка с двойной рессорной серьгой, а также поворотная тележка Y25. При этом поворотными тележками называют тележки рельсовых транспортных средств, у которых две или более колесные пары установлены на раме с возможностью поворота относительно кузова вагона.
Согласно второму этапу способа по данному изобретению, по меньшей мере, путевым замедлителем сортировочной горки управляют с учетом, по меньшей мере, определенного параметра сопротивления от крутизны. При этом, по меньшей мере, одну величину сопротивления от крутизны учитывают, с одной стороны, таким образом, чтобы он заходил непосредственно в управляющее устройство путевым замедлителем в качестве параметра. С другой стороны, по меньшей мере, одну величину сопротивления от крутизны используют для расчета других величин или параметров, которые затем заходят в управляющее устройство, по меньшей мере, путевым замедлителем. В частности, как описано выше, сопротивление качения соответствующего отцепа является также важным параметром воздействия при управлении маневровой сортировочной горкой. На практике существует проблема невозможности непосредственного измерения с необходимой точностью сопротивления качения отцепа. Следовательно, задачей управляющего устройства для маневровой сортировочной горки является определение сопротивления качения отцепа на основе имеющихся данных измерений и его оценка путем прогнозирования для следующего отрезка пути. При этом определение сопротивление качения на основе имеющихся данных измерений осуществляют, например, таким образом, чтобы определить сначала общую величину сопротивления, действующего на соответствующий отцеп, например на основе зафиксированной разницы скоростей, а затем вычесть из общего сопротивления долю других видов сопротивления, например сопротивления воздуха, сопротивление стрелки, а также, в частности, сопротивление от крутизны пути. Оставшуюся после соответствующего вычитания разницу принимают за сопротивление качения соответствующего отцепа или используют в качестве входного параметра для прогнозирования соответствующего сопротивления качения. Таким образом, улучшение определения возникающего сопротивления качения обеспечивает, в конечном итоге, более высокую степень оценки величины сопротивления качения и способствует за счет этого улучшению прицельного торможения. Таким образом, это обеспечивает эффективную и экономичную ранжировку, в отдельных случаях без осаживателя.
В основу способа по данному изобретению положен принципиальный вывод о том, что учитывание типа ходовой тележки или типов ходовых тележек соответствующего отцепа в значительной степени повышает точность определения сопротивления от крутизны пути по сравнению с учитыванием только других параметров отцепов, например количества осей, межосевого расстояния или длины отцепов. Так путем соответствующих измерений и моделирования было показано, что возникающее сопротивление от крутизны пути в значительной степени зависит от типа ходовых тележек соответствующего отцепа. Таким образом, учитывание типа тележки обеспечивает явное повышение точности определения сопротивления от крутизны пути. Результатом учета определенного таким образом, по меньшей мере, одного параметра сопротивления от крутизны пути при управлении, по меньшей мере, путевым замедлителем сортировочной горки предпочтительно является повышение пропускной способности сортировочной горки. Альтернативно или дополнительно обеспечена возможность повышения качества ранжировки сортировочной горки за счет надежного предотвращения даже при неблагоприятных условиях эксплуатации аварий или повреждений ранжируемых вагонов или их груза, например, от угловых наездов или недопустимой степени ударов от наката вагонов друг на друга.
Следует учесть, что определение, по меньшей мере, одного параметра сопротивления от крутизны пути, по меньшей мере, на одной кривой пути соответствующего отцепа осуществляют как в процессе сортировки, так и до ее начала. Это означает, что существует возможность полного определения или прогнозирования возникающего сопротивления от крутизны пути еще до начала сортировки соответствующего отцепа. В зависимости от архитектуры используемого управляющего устройства целесообразно осуществлять соответствующее определение сопротивления от крутизны пути, например, посредством соответствующего управляющего устройства путевым замедлителем только в процессе сортировки.
Согласно особенно предпочтительному варианту осуществления способа по данному изобретению выявляют, по меньшей мере, тип ходовой тележки соответствующего отцепа с учетом предварительных данных системы диспозиции. В зависимости от соответствующего типа исполнения предварительные данные системы регулирования парка вагонов содержат в этом случае либо непосредственно, по меньшей мере, тип тележки соответствующего отцепа, либо номер вагона или номера вагонов соответствующего отцепа, обеспечивающие возможность идентификации ходовой тележки по банку данных вагонов.
Предпочтительно способ, по данному изобретению, усовершенствуют путем получения данных осей соответствующего отцепа и установления, по меньшей мере, одного типа тележки соответствующего отцепа с учетом полученных данных осей. Учитывание полученных данных осей при установлении, по меньшей мере, одного типа тележки соответствующего отцепа предпочтительно, так как соответствующие данные осей, как правило, доступны в маневровых сортировочных горках. Однако необходимо принять во внимание, что в зависимости от различных типов вагонов, сортируемых на маневровой сортировочной горке, самих по себе данных осей соответствующего отцепа недостаточно для надежного установления типа или типов ходовых тележек соответствующего отцепа. Причиной этого служит то, что, по меньшей мере, относительно распространенных в Европе поворотных тележек товарных вагонов существуют ходовые тележки с одинаковыми типами осей. Так, например, у поворотной тележки Y25 и у поворотной тележки BA 665 межосевое расстояние составляет 1,8 м. Не смотря на это, полученные данные осей в любом случае учитывают для проверки достоверности или проверки в рамках установления, по меньшей мере, типа тележки соответствующего отцепа. Например, существует возможность установить, по меньшей мере, один тип тележки соответствующего отцепа на основе предварительных данных системы регулирования парка вагонов, а также на основе полученных данных осей. В этом случае порученные данные осей обеспечивают возможность выявления при проверке предварительных данных системы регулирования парка вагонов, например, ошибок в сведении или секционировании.
В альтернативном или дополнительном к двум указанным вариантам осуществления варианте способ по данному изобретению осуществляют таким образом, чтобы получить, по меньшей мере, один специфический параметр соответствующего отцепа и установить, по меньшей мере, один тип тележки соответствующего отцепа с учетом, по меньшей мере, одного полученного параметра. Специфическим параметром соответствующего отцепа, получаемым, например, визуально с помощью видеокамеры или из RFID-тегов (радиочастотная идентификация) товарных вагонов отцепов, служит, например, по меньшей мере, номер вагона, тип вагона или вагонов и/или тип ходовой тележки вагона или вагонов соответствующего отцепа. По меньшей мере, один полученный параметр используют отдельно или в комбинации с дополнительной информацией для установления типа ходовой тележки или типов ходовых тележек соответствующего отцепа.
В другом, особенно предпочтительном варианте осуществления способа по данному изобретению, по меньшей мере, тип ходовой тележки получают из банка данных вагонов на основе, по меньшей мере, одного определенного параметра. При этом существует, например, возможность получить из банка данных вагонов, по меньшей мере, тип тележки вагона или вагонов соответствующего отцепа на основе полученного параметра в виде номера вагона. Предпочтительно способ по данному изобретению осуществляют также, определяя для соответствующего отцепа удельные фазы движения по кривой на пути этого отцепа. В результате проведенных исследований было установлено, что отцепы проходят кривую, как правило, не равномерно, а с наличием соответственно различных фаз движения по кривой. Согласно указанному предпочтительному варианту усовершенствования способа по данному изобретению предпочтительно для соответствующего отцепа определяют характерные выявленные фазы движения по кривым на пути соответствующего отцепа, т.е. при этом учитывают характеристики конкретного отцепа. Предпочтительно способ по данному изобретению усовершенствуют также путем определения фаз прохождения кривой с учетом, по меньшей мере, типа ходовой тележки соответствующего отцепа. Доказано, что товарные вагоны с различными типами ходовых тележек в одной и той же точке кривой имеют различные характеристики и поэтому предпочтительно установление для различных типов ходовых тележек различных фаз прохождения кривой.
Согласно другому особенно предпочтительному варианту осуществления способа по данному изобретению в рамках определения, по меньшей мере, одного значения сопротивления от крутизны пути в установленных фазах прохождения кривых используют различные модели расчета. Это означает, что сопротивление от крутизны пути рассчитывают в различных фазах движения по кривой разными методами. Предпочтительно это обеспечивает возможность учитывать при расчетах, по меньшей мере, параметра сопротивления от крутизны пути характерные особенности ходовой части, например задержку вращения поворотной тележки или жесткость ходовой тележки с двойной рессорной серьгой. В соответствующе применяемых моделях расчета для этого предпочтительно используют полученные, в частности, путем измерений и многотельного моделирования данные динамики движения.
Предпочтительно способ по данному изобретению реализуют также с учетом при определении фаз движения по кривой и/или при выборе той или иной модели расчетов, по меньшей мере, один дополнительный параметр, характеризующий соответствующий отцеп и/или соответствующие условия окружающей среды. По меньшей мере, одним дополнительным, характеризующим соответствующий отцеп параметром является, например, межосевое расстояние или межосевые расстояния соответствующего отцепа, так как у товарных вагонов с одинаковым типом тележек могут быть разные межосевые расстояния. Другим дополнительным, характеризующим соответствующий отцеп параметром является, например, жесткость ходовой тележки или в случае отцепа с поворотной тележкой Y25 расстояние между шкворнями поворотной тележки Y25.
Предпочтительно способ по данному изобретению реализуют также путем выбора соответствующей модели расчетов на основе дерева выбора. Использование дерева выбора при выборе соответствующей модели расчетов предпочтительно, так как обеспечивает простой, полностью определенный и быстрый выбор модели расчетов для соответствующей ситуации.
Изобретение относится также к управляющему устройству для маневровой сортировочной горки.
Относительно управляющего устройства в основе данного изобретения лежит задача предложить управляющее устройство для маневровой сортировочной горки, обеспечивающее повышение пропускной способности и/или качество ранжировки сортировочной горки за счет улучшенного определения возникающего сопротивления от крутизны пути.
Согласно изобретению эту задачу решают посредством управляющего устройства для маневровой сортировочной горки, причем управляющее устройство предназначено для определения для соответствующих отцепов в виде сортируемого вагона или групп вагонов, по меньшей мере, одного параметра сопротивления от крутизны пути, по меньшей мере, на одной кривой на пути соответствующего отцепа и управления, по меньшей мере, одним путевым замедлителем сортировочной горки с учетом, по меньшей мере, одного определенного параметра сопротивления от крутизны пути.
Управляющее устройство по данному изобретению включает наряду с техническими компонентами, например, в виде соответствующих процессоров и накопителей, также и программные компоненты, например, в виде программных кодов моделирования характера движения отцепов. С технической точки зрения управляющее устройство может быть выполнено как в виде центрального поста управления сортировочной горкой технической ранжировки, так и в виде автономного устройства управления, например, в виде вагонного замедлителя нижней тормозной позиции или устройства управления паркового вагонного замедлителя. Кроме этого управляющее устройство по данному изобретению предпочтительно выполнено в виде разгруппированного управляющего устройства, т.е. включает центральный пост управления и автономные устройства управления путевыми замедлителями.
Преимущества управляющего устройства по данному изобретению соответствуют преимуществам способа по данному изобретению и поэтому при их описании указаны ссылки на приведенные выше выкладки. Это относится также и к указанным ниже предпочтительным вариантам осуществления управляющего устройства по данному изобретению и поэтому при их описании указаны ссылки на приведенные выше пояснения.
Согласно особенно предпочтительному варианту осуществления управляющее устройство по данному изобретению предназначено для определения, по меньшей мере, одного типа ходовых тележек соответствующего отцепа с учетом предварительных данных системы диспозиции.
Согласно другому особенно предпочтительному варианту осуществления управляющее устройство по данному изобретению предназначено для определения данных осей соответствующего отцепа и, по меньшей мере, типа ходовых тележек с учетом установленных данных осей.
Альтернативно или дополнительно к двум указанным выше вариантам исполнения управляющее устройство по данному изобретению предназначено для определения, по меньшей мере, специфического параметра соответствующего отцепа и, по меньшей мере, типа ходовой тележки соответствующего отцепа с учетом, по меньшей мере, полученного параметра.
Согласно другому особенно предпочтительному варианту исполнения управляющее устройство по данному изобретению предназначено для получения из банка данных вагонов, по меньшей мере, типа ходовой тележки соответствующего отцепа на основе, по меньшей мере, одного параметра.
Согласно другому особенно предпочтительному варианту исполнения управляющее устройство по данному изобретению предназначено для определения характерных для соответствующего отцепа фаз движения по кривой на соответствующем участке пути соответствующего отцепа. Предпочтительно управляющее устройство по данному изобретению предназначено для определения фаз движения по кривой с учетом, по меньшей мере, типа ходовой тележки соответствующего отцепа.
Согласно предпочтительному варианту усовершенствования управляющее устройство по данному изобретению предназначено для использования различных моделей расчета при определении, по меньшей мере, одного параметра сопротивления от крутизны пути для установленных фаз движения по кривой.
Предпочтительно управляющее устройство по данному изобретению предназначено для учитывания при определении фаз движения по кривой и/или при выборе соответствующей модели расчета, по меньшей мере, дополнительного параметра, характеризующего соответствующий отцеп и/или соответствующие условия окружающей среды.
Предпочтительно управляющее устройство по данному изобретению предназначено для выбора соответствующей модели расчета посредством дерева выбора.
Далее изобретение более подробно раскрыто на основе примеров его осуществления. На чертежах представлено следующее:
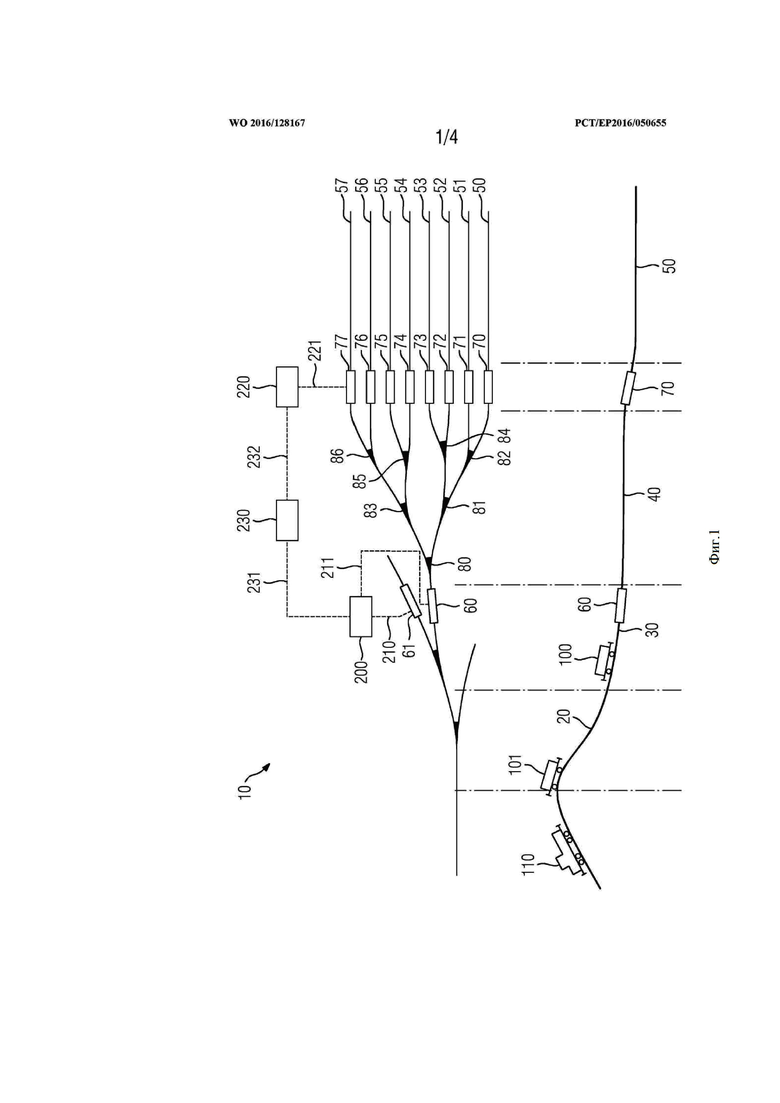
фиг. 1 – план-схема примера выполнения сортировочной горки с примером выполнения управляющего устройства по данному изобретению;
фиг. 2 – схема примера выполнения дерева выбора, используемого в рамках примера осуществления способа по данному изобретению;
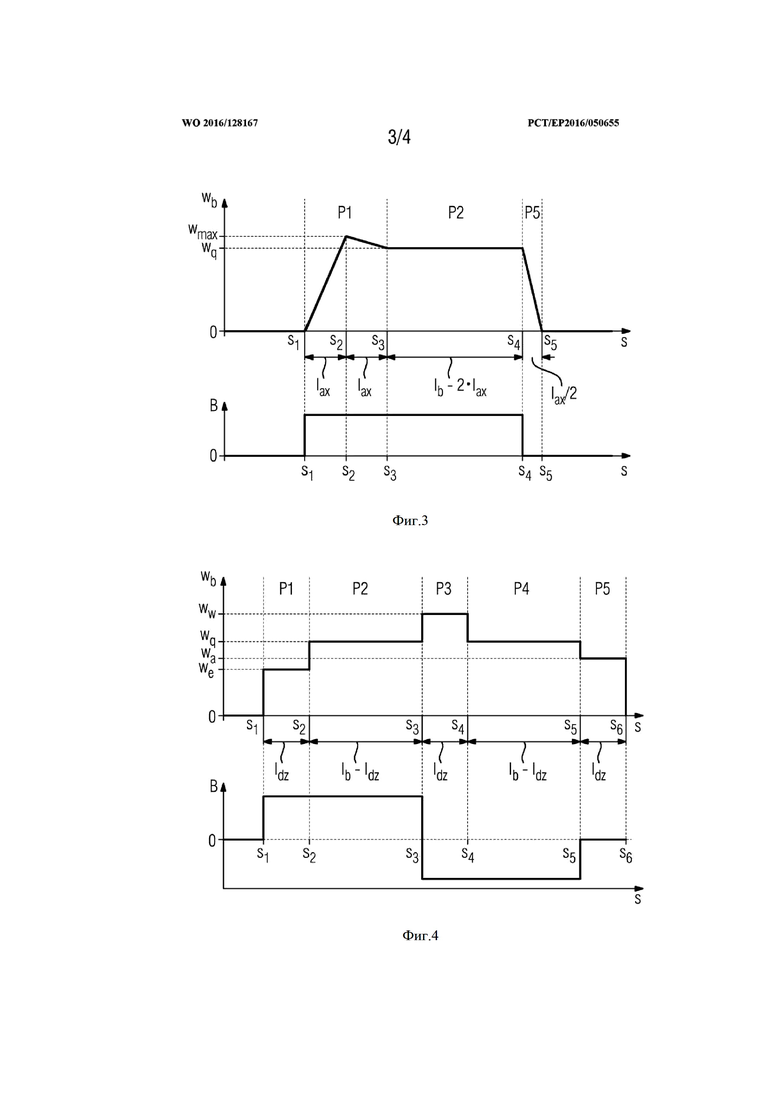
фиг. 3 – первое схематичное изображение сопротивления от крутизны пути в качестве функции места по отношению к первой кривой пути и отцепу с первым типом ходовой тележки;
фиг. 4 – второе схематичное изображение сопротивления от крутизны пути в качестве функции места по отношению ко второй кривой пути и отцепу со вторым типом ходовой тележки;
фиг. 5 – первый пример выполнения различных фаз движения по кривой на первой диаграмме местных координат х и у по отношению к первому отцепу;
фиг. 6 - первый пример выполнения различных фаз движения по кривой на второй диаграмме местных координат х и у по отношению ко второму отцепу.
На фигурах соответствующие друг другу компоненты и величины имеют идентичные условные обозначения.
На фиг. 1 показана план-схема примера выполнения сортировочной горки 10 с примером выполнения управляющего устройства по данному изобретению. При этом в верхней части фиг. 1 показана схема путей сортировочной горки 10, а в нижней части фигуры показан профиль или продольный разрез сортировочной горки 10.
Согласно изображению на фиг. 1 сортировочная горка 10, являющаяся частью маневрового участка железнодорожной транспортной системы, включает скоростной уклон 20, к которому в направлении спуска примыкают промежуточный уклон 30, зона 40 сортировки с разделительными стрелками 80-86, а также сортировочные пути 50-57. Также на фиг. 1 показаны путевые замедлители в виде вагонных замедлителей 60-61 нижней тормозной позиции и парковых вагонных замедлителей 70-77. Наряду с указанными компонентами сортировочной горки 10 в качестве примера показаны отцепы 100 и 101, поднятые или отцепленные горочным локомотивом на сортировочную горку и движущиеся под воздействием милы тяжести вдоль сортировочной горки 10. Внимание сконцентрировано на первый в направлении движения отцеп 100, причем в его отношении принято, что он предназначен для сортировочного пути 50 и проходит на своем пути путевые замедлители 60 и 70.
На фиг. 1 показано также устройство 200 для управления вагонными замедлителями 60-61 нижней тормозной позиции, соединенное проводными или беспроводными коммуникациями 210 и 211 с вагонными замедлителями 60-61 нижней тормозной позиции. Соответствующим образом парковые вагонные замедлители 70-77 коммутированы с устройством 220 управления парковыми вагонными замедлителями. Для наглядности на фиг. 1 только в качестве примера показана коммуникация 221 между парковым вагонным замедлителем 77 и устройством 220 управления парковыми вагонными замедлителями. Устройство 200 для управления вагонными замедлителями 60-61 нижней тормозной позиции и устройство 220 управления парковыми вагонными замедлителями соединены коммуникациями 231 или 232 с центральным постом 230 управления сортировочной горки 10. Это означает, что компоненты 200, 220 и 230 вместе образуют управляющее устройство путевыми замедлителями в виде вагонных замедлителей 60-61 нижней тормозной позиции и парковых вагонных замедлителей 70-77 в виде разгруппированного управляющего устройства. Возможен, например, альтернативный вариант, в котором вагонные замедлители 60-61 нижней тормозной позиции и парковые вагонные замедлители 70-77 соединены непосредственно с центральным постом 230 управления. Управление вагонными замедлителями 60-61 нижней тормозной позиции и парковыми вагонными замедлителями 70-77 сортировочной горки 10 осуществляют согласно примеру осуществления способа по данному изобретению относительно отцепа 100 таким образом, чтобы определить для него на первом технологическом этапе, по меньшей мере, величину сопротивления от крутизны пути, по меньшей мере, на одной кривой на пути отцепа 100 с учетом типа ходовой тележки отцепа 100. В этом примере осуществления кривой является, например, кривая между разделительной стрелкой 82 и парковым вагонным замедлителем 70.
Учитываемый при определении, по меньшей мере, одного параметра сопротивления от крутизны указанной кривой тип ходовой тележки отцепа 100 определяют, например, на основе предварительных данных системы регулирования парка вагонов. Альтернативно или в отдельных случаях дополнительно фиксируют данные осей отцепа 100 и определяют тип ходовой тележки отцепа 100 с учетом полученных данных осей. После определения типа ходовой тележки отцепа 100 с учетом предварительных данных системы регулирования парка вагонов, полученные данные осей используют для перепроверки или проверки точности этих предварительных данных. При однозначном подтверждении типа ходовой тележки сортируемых на горке 10 товарных вагонов полученными данными осей последние отдельно используют для определения типа ходовой тележки отцепа 100.
Альтернативно или дополнительно к указанным возможностям маневровая сортировочная горка 10 обеспечивает также возможность фиксирования, например, соответствующей видеокамерой, по меньшей мере, специфического для отцепа 100 параметра и определения типа ходовой тележки отцепа 100 с учетом полученного параметра. По меньшей мере. Одним специфическим для отцепа 100 параметром может быть, например, номер соответствующего вагона, причем в этом случае тип ходовой тележки соответствующего отцепа берут из банка данных вагонов на основе установленного параметра в виде номера вагона. В данном примере осуществления согласно изображению на фиг. 1 отцеп 100 является одиночным вагоном и, следовательно, только с одним типом ходовой тележки. Если, однако, соответствующий отцеп представляет собой сортируемую группу вагонов, то для этой группы вагонов определяют, по меньшей мере, один тип ходовой тележки. Если это вагоны с общим для них типом ходовой тележки, то явно достаточно идентифицировать этот тип ходовой тележки; если группа вагонов включает вагоны с отличающимися типами ходовых тележек, то все равно целесообразно или необходимо определить тип ходовой тележки каждого отдельного вагона.
Определение сопротивления от крутизны пути кривой на пути отцепа 100 осуществляют в рамках описанного примера осуществления способа по данному изобретению на основе эмпирически установленной формулы или модели расчетов. Они выведены на основе, например, полученных в рамках серий измерений параметров с учетом многотельного моделирования, а также характеристик, специфических для соответствующего типа ходовой тележки. При этом задание параметров модели расчетов осуществляют, например, с применением адаптивного метода.
Определение величины сопротивления от крутизны кривых на пути отцепов имеет для маневровых сортировочных горок принципиальное значение, так как соответствующее сопротивление от крутизны пути значительно влияет на характер движения отцепов. Например, товарные вагоны движутся по автоматической системе формирования поездов автономно под действием силы тяжести и их направляют не предназначенные для них сортировочные пути посредством автоматических стрелок. При этом свободное движение товарных вагонов или отцепов необходимо постоянно контролировать по соображениям безопасности. Так как в автономно сходящих товарных вагонах, как правило, отсутствует техническая возможность непрерывного регулирования скорости, то скорость соответственно регулируют исключительно посредством точечно установленных по ходу движения путевых замедлителей. Следствием этого является необходимость прогнозирования хода вагонов между замедлителями, чтобы своевременно выявить возможные опасные ситуации.
Необходимо отметить, что в рамках описанного способа, по меньшей мере, один параметр сопротивления от крутизны пути отцепа 100 определяют как для находящейся на пути впереди кривой, так и для пройденной кривой.
Это означает относительно находящейся на пути впереди кривой, например для показанной на фиг. 1 ситуации с указанной кривой между разделительной стрелкой 82 и парковым вагонным замедлителем 70, что для этой кривой прогнозируют сопротивление от крутизны пути, чтобы учесть его при управлении путевым замедлителем перед этой кривой, т.е. в данном случае вагонным замедлителем 60 нижней тормозной позиции.
Не смотря на то, что для сопротивления качению отцепа почти не существует подходящих моделей оценки, существует возможность определения сопротивления от крутизны пути, по меньшей мере, на уже пройденной отцепом 100 кривой и его учитывания при расчете или прогнозировании сопротивления качения соответствующего отцепа. В показанной на фиг. 1 ситуации это относится к кривой между первой стрелкой и вагонным замедлителем 60 нижней тормозной позиции. Конкретно это осуществляют, например, путем определения сначала общей величины воздействующего на отцеп 100 сопротивления устройством 200 управления вагонным замедлителем нижней тормозной позиции. Это основано, например, на законе сохранения энергии с использованием разности между скоростями, полученной от колесных датчиков или наземных измерительных радаров. Затем из суммы общего сопротивления вычитают долю сопротивления, известную или прогнозируемую с достаточной степенью точности, например сопротивление воздуха, сопротивление стрелок и возникающее сопротивление от кривизны пути. Остаток принимают за сопротивление качению и используют в качестве входного параметра для прогнозирования сопротивления качению на оставшемся отрезке пути.
На втором технологическом этапе описанного примера осуществления способа по данному изобретению, по меньшей мере, одним путевым замедлителем сортировочной горки 10 управляют с учетом, по меньшей мере, одного определенного значения сопротивления от крутизны пути. Согласно изображению на фиг. 1 по отношению к отцепу 100 и предназначенному ему пути – это вагонный замедлитель 60 нижней тормозной позиции и/или парковый вагонный замедлитель 70. Результатом учета типа ходовой тележки отцепа 100 и связанного с этим более точного определения или прогнозирования возникающего сопротивления от крутизны пути, а также вытекающих из этого более точных оценочных параметров сопротивления качению является повышение точности целевого торможения. С одной стороны, это обеспечивает более эффективную сортировку, даже без использования осаживателя; с другой стороны, это обеспечивает за счет улучшенного прогнозирования хода движения отцепов 100, 101 предотвращение нагона или угловых наездов отцепов 100, 101, что повышает качество ранжировки сортировочной горки 10. Таким образом, улучшенное определение возникающего сопротивления от крутизны пути в целом обеспечивает повышение пропускной способности и качества ранжировки маневровой сортировочной горки 10.
Для осуществления указанного способа управляющее устройство, по меньшей мере, с одним из таких компонентов, как центральный пост 230 управления, устройство 200 управления вагонными замедлителями нижней тормозной позиции или устройство 220 управления парковыми вагонными замедлителями, включает наряду с техническим компонентами в виде соответствующих процессоров и накопителей также программные компоненты в виде программных кодов модулирования характера движения отцепов 100, 101. Здесь необходимо указать на то, что при управлении вагонными замедлителями нижней тормозной позиции 60, 61 и парковыми вагонными замедлителями 70-77 учитывают следующий за отцепом 100 отцеп 101, а также, при необходимости, отцеп, идущий или прошедший перед отцепом 100. При этом необходимо принимать во внимание соответствующий общий отрезок пути отцепов 100, 101, чтобы избежать наката и обеспечить надежное срабатывание разделительных стрелок 80-86 в сортировочной зоне 40. Кроме этого в рамках способа учитывают и другие граничные условия, например максимальные скорости движения на отрезке пути.
Далее следуют разъяснения примеров осуществления способа по данному изобретению с привлечением фиг. 2-6.
На фиг. 2 показана схема примера выполнения дерева выбора, используемого в рамках способа по данному изобретению.
В рамках способа по данному изобретению предпочтительно относительно кривой на соответствующем отрезке пути соответствующего отцепа определяют специфические фазы прохождения кривой. При этом фазы прохождения кривой определяют предпочтительно с учетом, по меньшей мере, типа ходовой тележки соответствующего отцепа. Как описано ниже на примере фиг. 3 и 4, для определения, по меньшей мере, одного значения сопротивления от крутизны кривой для установленных фаз прохождения кривой используют предпочтительно разные модели расчетов. При определении фаз прохождения кривой и/или выборе соответствующей модели расчетов используют также, по меньшей мере, дополнительный параметр, характеризующий соответствующий отцеп и/или соответствующие условия окружающей среды. Все это обеспечивает в конечном итоге ситуативный выбор необходимой модели расчетов сопротивления от крутизны кривой. Это осуществляют предпочтительно с помощью дерева выбора, показанного, например, на фиг. 2.
На фиг. 2 показано дерево выбора с тремя уровнями L1, L2 и L3. Для простоты понимания показана только часть всего дерева выбора, в частности та часть, которую используют по ситуации на фиг. 1 для отцепов в виде одиночных вагонов. Соответственно на уровне L1 дерева выбора производят ответвление на ветку 300, если выполнен критерий выбора «одиночный вагон». Исходя из этого, на уровне L2 дерева выбора производят дифференсацию по типу ходовой тележки соответствующего одиночного вагона. Например, на фиг. 2 показаны две ветки 31- и 320, причем в описанном примере осуществления принято, что ветка 310 соответствует критерию выбора «тележка с двойной рессорной серьгой», а ветка 320 соответствует критерию выбора «поворотная тележка Y25». Как показано на фиг. 2, в зависимости от конкретных условий и требований могут быть предусмотрены и другие ветки для других типов ходовых тележек.
На следующем уровне L3 дерева выбора предусмотрены различные ветки для различных фаз прохождения кривой. При этом видно, что для двух различных типов ходовых тележек учтено различное количество фаз прохождения кривой. Так, например, принято, что для отцепов с двойной рессорной серьгой соответствует критерий 311 выбора фазы «переходная кривая на входе» прохождения кривой, критерий 312 «квазистатичное прохождение кривой» и критерий 313 «переходная кривая на выходе» прохождения кривой. В отличие от этого для товарного вагона с поворотной тележкой Y25 соответствует критерий 321 выбора фазы «переходная кривая на входе» прохождения кривой, критерий 322 «квазистатичное прохождение кривой», критерий 323 «переходная кривая на выходе» прохождения кривой и критерий 324 «смена направления кривой» дополнительного прохождения кривой. В основе этого лежит вывод о том, что смена направления кривой для поворотной тележки Y25, по меньшей мере, при отсутствии переходной кривой вызывает увеличение сопротивления от крутизны кривой и поэтому соответствующую фазу прохождения кривой при определении суммарного сопротивления от крутизны кривой на соответствующих кривых учитывают предпочтительно отдельно.
Необходимо отметить, что на практике в зависимости от конкретных условий используют деревья выбора с дополнительными уровнями. Это обеспечивает возможность учета одного или нескольких дополнительных параметров, характеризующих соответствующий отцеп и/или конкретные условия окружающей среды. Примером соответствующих параметров служит межосевое расстояние у товарных вагонов с тележкой с двойной рессорной серьгой, расстояние между шкворнями тележек у вагонов с поворотной тележкой Y25 или параметр условий окружающей среды, например погодные условия, т.е. влага или снег.
На фиг. 3 показана относительно первой кривой и отцепа с первым типом ходовой тележки первая схема сопротивления от крутизны кривой в качестве функции места. При этом принято, что отцеп является одиночным вагоном и первым типом ходовой тележки в данном примере осуществления является тележка с двойной рессорной серьгой.
В верхней части фиг. 3 показано сопротивление wb в качестве функции отрезка пути или места s. В нижней части фиг. 3 показан в виде «аркады» В ход рассматриваемой кривой пути в качестве функции места s. При этом ясно, что кривая проходит между точками s1 и s4.
В верхней части фиг. 3 видно, что в рамках определения сопротивления wb от крутизны кривой различают три фазы прохождения кривой Р1, Р2 и Р5. В первой фазе прохождения кривой Р1, соответствующей фазе входа, в соответствии с конкретной моделью расчетов сначала происходит непрерывное повышение сопротивления wb от крутизны кривой. При этом начинается фаза Р1 входа первой оси отцепа в кривую. Сопротивление wb от крутизны кривой достигает максимального значения в фазе Р1 входа в точке и обозначено на фиг. 3 как wmax. Затем сопротивление wb от крутизны кривой падает на следующем участке до точки s3 до значения wq, сопротивления следующей фазы Р2 прохождения кривой, называемой также квазистатичной фазой. Необходимо отметить, что в зависимости от соответствующего межосевого расстояния отцепа выбирают и модель расчетов, при которой wmax = wq .
Согласно изображению на фиг. 3 в рамках данного примера осуществления принято, что фаза Р1 входа заканчивается после отрезка пути, соответствующего двойному межосевому расстоянию lax товарного вагона с тележкой с двойной рессорной серьгой. После фазы Р1 входа следует квазистатичная фаза Р2. За ней следует фаза Р5 выхода, начиная с выходом первой оси вагона из кривой в точке s4. В фазе Р5 выхода сопротивление wb от крутизны кривой непрерывно падает до 0, причем сопротивление wb от крутизны кривой в точке s5, т.е. через половину длины вагона пропадает. В этой связи необходимо отметить, что изображение по фиг. 3 и 4 при указании точки s относится соответственно к первой оси в направлении движения соответствующего отцепа. Продолжительность квазистатичной фазы Р2 между точками s3 и s4 вытекает из разницы длины кривой lb и двойного межосевого расстояния lax.
На фиг. 4 относительно второй кривой и отцепа со вторым типом ходовой тележки показана вторая схема сопротивления от крутизны кривой в качестве функции места. При этом в рамках примера осуществления по фиг. 4 принято, что соответствующий отцеп является четырехосным вагоном с поворотной тележкой Y25.
Изображение по фиг. 4 соответствует по своему типу изображению по фиг. 3. При сравнении обеих фигур видно, что в примере осуществления по фиг. 4 в качестве показанной аркады В рассматривают кривую со сменой направления, т.е. с изменением направления кривой. Для принятого в рамках данного примера осуществления четырехосного вагона с поворотными тележками Y25 различают согласно фиг. 4 пять фаз прохождения кривой Р1, Р2, Р3, Р4 и Р5.
При этом наряду с фазой входа Р1, квазистатичной фазой Р2 и фазой выхода Р5 в отличие от фиг. 3 дополнительно учитывают фазу Р3 смены направления и дополнительную квазистатичную фазу Р4. Фаза входы Р1 начинается в точке s1 с входом первой поворотной тележки товарного вагона в кривую и продолжается до моменте входа в кривую и второй поворотной тележки. В этот момент передняя ось вагона находится в точке s2. Далее следует квазистатичная фаза Р2, которая завершается в момент смены радиуса кривой на первой поворотной тележке. Фаза Р3 смены направления определена нахождением обеих поворотных тележек рассматриваемого отцепа на кривых с разными направлениями дуги. Как при смене направления, так и при изменении радиуса с сохранением направления кривой действует повышенное сопротивление от крутизны кривой, предпочтительно учитываемое при определении сопротивления wb от крутизны кривой.
В результате соответствующих испытаний установлено, что у четырехосного вагона с поворотными тележками Y25 расстояние между шкворнями тележек оказывает решающее влияние на длину фаз прохождения кривой. Так согласно изображению по фиг. 4 продолжительность ограниченной точками s1 и s2 фазы Р1 входа, ограниченной точками s3 и s4 фазы Р3 смены направления и ограниченной точками s5 и s6 фазы выхода Р5 соответствует расстоянию ldz между шкворнями тележек отцепа. Продолжительность квазистатичных фаз Р2 и Р4 соответствует длине lb кривой за вычетом расстояния ldz между шкворнями тележек. При этом согласно изображению по фиг. 4 сопротивление wb от крутизны кривой получает в рамках моделирования ступенчатый характер, причем значение сопротивление wb от крутизны кривой в фазе Р1 входа обозначено как we, в квазистатичных фазах Р2 и Р4 – как wq, в фазе Р3 смены направления – как ww и в фазе Р5 выхода – как wa.
При сравнении фиг. 3 и 4 видно, что учет типа ходовой тележки соответствующего отцепа обуславливает выбор явно разных моделей расчетов сопротивления от крутизны кривой. Также видно, что предпочтительно учитывают разные фазы прохождения кривой, характерные для соответствующего типа ходовой тележки.
Далее на фиг. 5 показана первая диаграмма координат места х и у относительно выполнения первого примера осуществления различных фаз прохождения кривой. При этом принято, что соответствующий отцеп является одиночным вагоном с поворотной тележкой Y25, у которого расстояние между шкворнями тележек составляет 7 м.
Показанные фазы прохождения кривой от a1 до а10 на этой диаграмме х-у соответствуют виртуальному движению соответствующего отцепа на конкретных отрезках пути с обозначением соответствующих фаз прохождения кривой в конкретной точке х-у.
Конкретно в случае с фазой прохождения кривой речь идет о фазе a1 входа, переходящей в квазистатичную фазу a2. Согласно изображению по фиг. 5 за ней следует фаза смены радиуса или направления a3, переходящая снова в квазистатичную фазу a4 прохождения кривой. После фазы a5 выхода следует т.н. промежуточная прямая a6. Промежуточная прямая соответствует ситуации, когда после выхода первой поворотной тележки из первой кривой сначала следует короткая фаза выхода, протяженность которой равна промежуточной прямой. Затем, со входом первой поворотной тележки во вторую кривую начинается особая фаза прохождения кривой, на которой промежуточная прямая расположена под вагоном, а вторая поворотная тележка пока еще проходит первую кривую. Эта фаза прохождения кривой в рамках данного описания обозначена как промежуточная прямая.
За промежуточной прямой a6 следует фаза входа a7, переходящая снова в фазу a8 квазистатичного прохождения кривой. Ее завершает фаза a9 выхода, за которой согласно фиг. 5 следует прямая a10. Это означает, что a10 не является, собственно, фазой прохождения кривой, так как в показанном примере осуществления в этой точке или к этому моменту все оси отцепа уже полностью прошли кривые отрезка пути.
На фиг. 6 показана вторая диаграмма координат места х и у второго примера осуществления различных фаз прохождения кривой для второго отцепа. При этом принято, что речь идет снова об одиночном товарном вагоне, но с явно более большим расстоянием между шкворнями тележек, составляющим 19 м.
Показанный на фиг. 6 отрезок пути соответствует отрезку по фиг. 5. Не смотря на одинаковый тип ходовой тележки, при сравнении обеих фигур видно, что фазы a11 - a21 прохождения кривой явно отличаются по своему виду от показанных на фиг. 5 фаз a1 – a10 прохождения кривой. Так, согласно фиг. 6 за промежуточной прямой следует фаза a12 входа с последующей короткой квазистатичной фазой a13 прохождения кривой. Далее следует фаза a14 смены радиуса, за которой снова следует короткая квазистатичная фаза a15 прохождения кривой. После фазы a16 выхода следует снова фаза прохождения кривой в виде промежуточной прямой a17, за которой следует фаза a18 входа. После следующей квазистатичной фазы a19 и фазы a20 выхода согласно фиг. 6 также следует отрезок пути a21 в виде прямой.
Таким образом, из фиг. 5 и 6 явно следует, что для определенных типов ходовых тележек, например поворотной тележки Y25, предпочтительно учитывать наряду с соответствующим типом ходовой тележки и, по меньшей мере, одну специфическую характеристику соответствующего отцепа, например расстояние между шкворнями тележек. Относительно показанного на фиг. 2 дерева выбора это означает наличие у него дополнительного соответствующего уровня. В альтернативном варианте поворотные тележки Y25 с разным расстоянием между шкворнями рассматривают как разные типы ходовых тележек.
В итоге на основе двух описанных примеров осуществления изобретения ясно, что отцепы с разными типами ходовых тележек испытывают разное сопротивление от крутизны кривой. Следовательно, учитывание типа ходовой тележки соответствующего отцепа при определении сопротивления от крутизны кривой и при последующем управлении, по меньшей мере, одним путевым замедлителем сортировочной горки с учетом, по меньшей мере, определенного значения сопротивления от крутизны кривой значительно повышает пропускную способность и качество ранжировки маневровой сортировочной горки. Кроме этого предпочтительно различают разные фазы прохождения кривой, что также повышает точность расчетов или прогнозирования сопротивления от крутизны кривой. В зависимости от конкретных условий это также релевантно для учитывания при определении фаз прохождения кривой и/или при выборе соответствующей необходимой модели расчетов, по меньшей мере, одного параметра, характерного для конкретного отцепа и/или для конкретных условий окружающей среды.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЭКСПЛУАТАЦИИ МАНЕВРОВОЙ СОРТИРОВОЧНОЙ ГОРКИ, А ТАКЖЕ УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ УКАЗАННОЙ ГОРКИ | 2016 |
|
RU2673913C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ СОРТИРОВОЧНОЙ ГОРКИ И СИСТЕМА УПРАВЛЕНИЯ СОРТИРОВОЧНОЙ ГОРКОЙ | 2012 |
|
RU2574039C2 |
| Тренажерный комплекс оперативного персонала сортировочной горки | 2023 |
|
RU2810931C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ СОРТИРОВОЧНОЙ ГОРКИ ПРИ РАНЖИРОВКЕ И УСТРОЙСТВО УПРАВЛЕНИЯ СОРТИРОВОЧНОЙ ГОРКОЙ | 2018 |
|
RU2741459C1 |
| Устройство для управления технологическим процессом роспуска составов на сортировочной горке | 1981 |
|
SU1073146A1 |
| Комплексная система автоматизации управления сортировочным процессом (КСАУ СП) | 2020 |
|
RU2737815C1 |
| Способ и система управления подвижным составом при осуществлении надвига и роспуска с сортировочной горки | 2019 |
|
RU2705035C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ ТЕХНИЧЕСКОГО ОБОРУДОВАНИЯ СОРТИРОВОЧНОЙ ГОРКИ И СИСТЕМА УПРАВЛЕНИЯ ТАКОЙ ГОРКОЙ | 2017 |
|
RU2729132C1 |
| СПОСОБ РАБОТЫ СОРТИРОВОЧНОЙ ГОРКИ ДЛЯ РЕЛЬСОВОГО ТРАНСПОРТА, А ТАКЖЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ТАКОЙ СОРТИРОВОЧНОЙ ГОРКИ | 2011 |
|
RU2573149C2 |
| УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ ПОВРЕЖДЕНИЯ ВАГОНОВ ПРИ ЗАГРЯЗНЕНИИ БАНДАЖЕЙ КОЛЕСНЫХ ПАР ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2016 |
|
RU2634054C1 |


Изобретение относится к способу эксплуатации маневровой сортировочной горки (10). Способ осуществляют таким образом, чтобы определять для соответствующих отцепов (100, 101) в виде спускаемых вагонов или групп вагонов по меньшей мере значение сопротивления от крутизны кривой на пути соответствующего отцепа (100, 101) и управлять по меньшей мере путевым замедлителем (60, 70) с учетом по меньшей мере одного полученного значения сопротивления от крутизны кривой. Изобретение относится также к управляющему устройству (200, 220, 230) для маневровой сортировочной горки (10). В результате повышается пропускная способность и качество ранжировки сортировочной горки (10). 2 н. и 18 з.п. ф-лы, 6 ил.
1. Способ эксплуатации маневровой сортировочной горки (10), при котором для конкретных отцепов (100, 101) в виде спускаемых вагонов или групп вагонов
- определяют по меньшей мере величину сопротивления от крутизны кривой по меньшей мере на одной кривой отрезка пути соответствующего отцепа (100, 101) с учетом по меньшей мере типа ходовой тележки соответствующего отцепа (100, 101) и
- управляют по меньшей мере одним путевым замедлителем (60, 70) сортировочной горки (10) с учетом по меньшей мере определенного параметра сопротивления от крутизны кривой.
2. Способ по п. 1, при котором определяют по меньшей мере один тип ходовой тележки соответствующего отцепа (100, 101) с учетом предварительных данных системы регулирования парка вагонов.
3. Способ по п. 1 или 2, при котором
- фиксируют данные осей соответствующего отцепа (100, 101) и
- определяют по меньшей мере один тип ходовой тележки соответствующего отцепа (100, 101) с учетом полученных данных осей.
4. Способ по любому из пп. 1-3, при котором
- фиксируют по меньшей мере специфический параметр, характерный для соответствующего отцепа (100, 101), и
- определяют по меньшей мере один тип ходовой тележки соответствующего отцепа (100, 101) с учетом полученного параметра.
5. Способ по п. 4, при котором из банка данных вагонов определяют по меньшей мере один тип ходовой тележки на основе по меньшей мере одного полученного параметра.
6. Способ по любому из пп. 1-5, при котором для конкретной кривой на пути соответствующего отцепа (100, 101) определяют специфические фазы прохождения кривой.
7. Способ по п. 6, при котором фазы прохождения кривой определяют с учетом по меньшей мере одного типа ходовой тележки соответствующего отцепа (100, 101).
8. Способ по п. 6 или 7, при котором в рамках определения по меньшей мере одного значения сопротивления от крутизны кривой для установленных фаз прохождения кривой используют разные модели расчетов.
9. Способ по п. 7 или 8, при котором при определении фаз прохождения кривой и/или при выборе ответствующей модели расчетов учитывают по меньшей мере дополнительный параметр, характеризующий соответствующий отцеп (100, 101) и/или конкретные условия окружающей среды.
10. Способ по п. 8 или 9, при котором выбор соответствующей модели расчетов осуществляют посредством дерева выбора.
11. Управляющее устройство (200, 220, 230) для маневровой сортировочной горки (10), выполненное с возможностью для соответствующих отцепов (100, 101) в виде спускаемого вагона или спускаемых вагонов
- определять по меньшей мере значение сопротивления от крутизны по меньшей мере одной кривой на пути соответствующего отцепа (100, 101) с учетом по меньшей мере типа ходовой тележки соответствующего отцепа (100, 101) и
- управлять по меньшей мере путевым замедлителем (60, 70) сортировочной горки (10) с учетом по меньшей мере определенного значения сопротивления от крутизны кривой.
12. Управляющее устройство по п. 11, которое выполнено с возможностью определения по меньшей мере типа ходовой тележки соответствующего отцепа (100, 101) с учетом предварительных данных системы регулирования парка вагонов.
13. Управляющее устройство по п. 11 или 12, предназначенное для
- фиксирования данных осей соответствующего отцепа (100, 101) и
- определения по меньшей мере типа ходовой тележки с учетом полученных данных осей.
14. Управляющее устройство по любому из пп. 11-13, предназначенное для
- фиксирования по меньшей мере параметра, специфического для соответствующего отцепа (100, 101), и
- определения по меньшей мере одного типа ходовой тележки соответствующего отцепа (100, 101) с учетом по меньшей мере одного полученного параметра.
15. Управляющее устройство по п. 14, предназначенное для того, чтобы на основе по меньшей мере одного полученного параметра получать из банка данных вагонов по меньшей мере один тип ходовой тележки соответствующего отцепа (100, 101).
16. Управляющее устройство по любому из пп. 11-15, предназначенное для определения для соответствующего отцепа (100, 101) специфических фаз прохождения соответствующей кривой на пути соответствующего отцепа (100, 101).
17. Управляющее устройство по п. 16, которое выполнено с возможностью определения фазы прохождения кривой с учетом по меньшей мере одного типа ходовой тележки соответствующего отцепа (100, 101).
18. Управляющее устройство по п. 16 или 17, выполненное с возможностью использования при определении по меньшей мере одного значения сопротивления от крутизны кривой разных моделей расчетов.
19. Управляющее устройство по п. 17 или 18, предназначенное для учета при определении фаз прохождения кривой и/или при выборе соответствующей модели расчетов по меньшей мере дополнительного параметра, характеризующего соответствующий отцеп (100, 101) и/или конкретные условия окружающей среды.
20. Управляющее устройство по п. 18 или 19, предназначенное для выбора соответствующей модели расчетов посредством дерева выбора.
| US 3815508 A, 11.06.1974 | |||
| US 6029103 A, 22.02.2000 | |||
| EP 1129922 B1, 18.04.2007 | |||
| Устройство для управления регулированием скорости отцепов на сортировочной горке | 1976 |
|
SU564201A1 |
| СПОСОБ СОРТИРОВКИ ВАГОНОВ | 2001 |
|
RU2216468C2 |
| Демпферная обмотка синхронной машины | 1952 |
|
SU95623A1 |

