На сортировочных горках вагоны или группы вагонов, называемые также отцепами, сортируются с пути надвига по разным сортировочным путям с использованием действующей на отцепы силы тяжести. При этом для повышения эффективности и надежности обычно осуществляется значительная автоматизация работы сортировочной горки. Подходящая для этой цели автоматическая система управления известна, например, из публикации фирмы «Сименс» «Аутоматизирунгсзюстем фюр Цугбильдунгсанлаген MSR32 - Мер Эффициенц унд Зихерхайт им Гютерферкер», № заказа: А19100-V100-B898-V1, Сименс АГ, 2010 г. При этом происходит автоматическое воздействие скорости на отцепы за счет соответствующего управления вагонным замедлителем нижней тормозной позиции таким образом, что скорость входа отцепов на следующую тормозную позицию в виде паркового вагонного замедлителя не превышает первого порогового значения, которое может составлять, например, около 4 м/с. Это гарантирует, что за счет расположенного в начале соответствующего сортировочного пути паркового замедлителя при любых обычно возникающих на практике обстоятельствах будет возможным достаточное затормаживание отцепов.
В основе изобретения лежит задача создания способа эксплуатации сортировочной горки, который обеспечивал бы повышение ее перерабатывающей способности.
Эта задача решается согласно изобретению посредством способа эксплуатации сортировочной горки, при котором для соответствующих отцепов в виде скатывающихся вагонов или групп вагонов для первого вагонного замедлителя, исходя из заданной скорости выхода из него, определяется по меньшей мере одно значение скорости входа в первый замедлитель, для лежащего по отношению к первому замедлителю вверх в горку второго замедлителя, исходя из по меньшей мере одного полученного значения скорости входа в первый замедлитель, определяется по меньшей мере одно значение скорости выхода из второго замедлителя, которым управляют с учетом по меньшей мере одного полученного значения скорости выхода.
Согласно первому этапу способа для соответствующих отцепов в виде скатывающихся вагонов или групп вагонов для первого замедлителя, исходя из заданной скорости выхода из него, определяется по меньшей мере одно значение скорости входа в первый замедлитель. При этом заданная скорость выхода из первого замедлителя постоянно задана или задается, с одной стороны, для всех отцепов. С другой стороны, возможно также, чтобы для соответствующего отцепа определялась уже заданная скорость выхода из первого замедлителя.
В рамках способа по меньшей мере одно полученное значение скорости входа в первый замедлитель может представлять собой, с одной стороны, отдельное значение, например, в виде максимальной скорости входа, при которой затормаживание соответствующего отцепа до заданной скорости выхода еще обеспечивается первым замедлителем. С другой стороны, по меньшей мере одно значение скорости входа может состоять, например, из нескольких дискретных значений скорости или диапазона скоростей, ограниченного верхней и нижней скоростями входа.
Согласно второму этапу способа для лежащего по отношению к первому замедлителю вверх в горку второго замедлителя, исходя из по меньшей мере одного полученного значения скорости входа в первый замедлитель, определяется по меньшей мере одно значение скорости выхода из второго замедлителя. Это значит, что по меньшей мере одно значение скорости выхода из второго замедлителя вычисляется или определяется вдоль пути движения «снизу вверх», т.е. от сортировочных путей в направлении горба горки. При этом в отличие от известного способа управления замедлителями, при котором исходят из одинаковой для всех отцепов заданной скорости входа, по меньшей мере одно значение скорости выхода из второго замедлителя определяется исходя из предварительно полученного по меньшей мере одного значения скорости входа в первый замедлитель, т.е. исходя из по меньшей мере одного, специфического для соответствующего отцепа значения скорости входа в первый замедлитель.
В рамках способа по меньшей мере одно полученное значение скорости выхода из второго замедлителя аналогично, по меньшей мере одному значению входа в первый замедлитель может представлять собой отдельное значение скорости, несколько дискретных значений или также диапазон или полосу скоростей.
Согласно третьему этапу способа вторым замедлителем управляют с учетом одного полученного значения скорости выхода. Это значит, что второй замедлитель приводится в действие таким образом, что соответствующий отцеп в нормальном случае в конце второго замедлителя не превышает максимально допустимой скорости выхода, так что за счет первого замедлителя можно обеспечить соблюдение заданной скорости выхода из первого замедлителя.
Таким образом, от известного способа, при котором заданная скорость выхода определяется отдельно от замедлителя к замедлителю, предложенный способ принципиально отличается, в частности, тем, что он предусматривает охватывающее замедлители определение скорости выхода из второго замедлителя. За счет этого предпочтительным образом может осуществляться общая оптимизация работы и тем самым перерабатывающей способности сортировочной горки. При этом в рамках способа, например, возможна оптимизация в отношении времени движения соответствующего отцепа. Так, например, за счет того, что затормаживание до низкого уровня скорости, как это принято для сортировочных путей, может происходить как можно дальше вниз под горку, можно обеспечить выход легких отцепов с высокой скоростью из замедлителя нижней тормозной позиции, поскольку известно, что в парковом замедлителе требуется уменьшить лишь сравнительно небольшую кинетическую энергию. За счет этого можно достичь меньшего временнóго интервала между следующими друг за другом отцепами, что обеспечивает в результате более высокую перерабатывающую способность горки. Это относится, в частности, к сортировочным горкам с асимметричными стрелочными зонами, т.е. например, с сильно различающимися в зависимости от соответствующего пути движения расстояниями между замедлителями нижней тормозной позиции и парковыми замедлителями.
Следует указать на то, что при управлении замедлителями можно, кроме того, учитывать специфические для соответствующей сортировочной горки краевые условия, например, в виде максимальных скоростей на пути движения.
Преимущественно способ усовершенствован таким образом, что по меньшей мере одно значение скорости входа в первый замедлитель определяется с учетом его работоспособности и свойств соответствующего отцепа. Это предпочтительно, поскольку благодаря этому обеспечивается наилучшее управление замедлителями сортировочной горки, учитывающее соответствующие условия в отношении первого замедлителя и соответствующего отцепа. В отношении работоспособности первого замедлителя можно предпочтительным образом учитывать специфические для соответствующего замедлителя аспекты, например его возраст или неисправный клапан.
Преимущественно способ может быть усовершенствован далее таким образом, что в качестве свойств соответствующего отцепа можно учитывать массу, число осей, распределение массы по осям и/или сопротивление движению. Это предпочтительно, поскольку в случае названных параметров речь идет о таких, которые в значительной степени влияют на ходовые качества соответствующего отцепа и, при необходимости, требуемую для затормаживания тормозную силу.
Согласно другому, особенно предпочтительному варианту способа по отношению к соответствующим отцепам регистрируется соответственно по меньшей мере одно измеренное значение и работоспособность первого замедлителя, учтенная при определении по меньшей мере одного значения скорости входа в него, адаптивно регулируется с помощью по меньшей мере одного зарегистрированного измеренного значения. При этом в качестве измеренных значений преимущественно регистрируются, в частности, фактические скорости входа в соответствующие замедлители и выхода из них и с помощью сравнения с запротоколированными ступенями торможения или состояниями замедлителя используются для согласования работоспособности соответствующего замедлителя. Это дает то преимущество, что изменения работоспособности замедлителей, которые могут возникнуть, например, из-за износа, автоматически учитываются при управлении ими и тем самым достигается стабильная надежность сортировочной горки.
Преимущественно способ может быть, кроме того, осуществляется таким образом, что при определении по меньшей мере одного значения скорости входа в первый замедлитель учитывается работоспособность, уменьшенная по сравнению с его максимальной работоспособностью. Это предпочтительно, поскольку за счет этого можно избежать, например, систематической перегрузки первого замедлителя, например, лежащего дальше вниз под горку. При этом, например, возможно, чтобы максимально имеющаяся в распоряжении ступень торможения и тем самым активная работа торможения или соответствующая работоспособность первого замедлителя уменьшались согласно коэффициенту.
Согласно особенно предпочтительному усовершенствованию способ осуществляется таким образом, что, исходя из по меньшей мере одного полученного значения скорости выхода из второго замедлителя определяется по меньшей мере одно значение скорости входа в него, для лежащего по отношению ко второму замедлителю вверх в горку третьего замедлителя, исходя из по меньшей мере одного полученного значения скорости входа во второй замедлитель, определяется по меньшей мере одно значение скорости выхода из третьего замедлителя, и третьим замедлителем управляют с учетом по меньшей мере одного полученного значения скорости выхода из него. Следовательно, способ может применяться предпочтительным образом для любого числа замедлителей, лежащих на соответствующем пути движения соответствующего отцепа. При этом соответственно начиная с лежащего дальше всего вниз под горку замедлителя, исходя из заданной или полученной скорости выхода из соответствующего замедлителя или исходя из соответствующих значений этой скорости выхода, определяется по меньшей мере одно значение скорости входа в соответствующий замедлитель, и по отношению к ближайшему в направлении горба горки замедлителю, исходя из этого по меньшей мере одного полученного значения скорости входа, определяется, по меньшей мере одно значение скорости выхода из этого замедлителя.
Способ, в принципе, подходит для управления замедлителями сортировочных горок.
Согласно другому, особенно предпочтительному варианту способа в случае первого замедлителя в виде паркового замедлителя вторым замедлителем управляют в виде замедлителя нижней тормозной позиции. Это предпочтительно, поскольку сортировочные горки зачастую имеют две соответствующие тормозные позиции. В случае третьего замедлителя речь может идти в этом случае, например, о горочном замедлителе, называемом также замедлителем на скоростном уклоне. Кроме того, в рамках изобретения можно учитывать также замедлители компенсации уклона, которые в зависимости от соответствующего выполнения сортировочной горки могут располагаться в зоне сортировочных путей.
Преимущественно способ осуществляется далее таким образом, что при управлении вторым замедлителем учитывается отцеп, предшествующий соответствующему отцепу и/или следующий за соответствующим отцепом. Так, с учетом по меньшей мере одного полученного значения скорости выхода вторым замедлителем можно предпочтительно управлять, в частности, таким образом, что такие отцепы, у которых на пути движения между вторым и первым замедлителями происходит или мог бы произойти временнóй конфликт с предшествующим отцепом, во втором замедлителе затормаживается таким образом, что они проходят через первый замедлитель для достижения заданной скорости выхода в экстремальном случае незаторможенными. Это позволяет смягчить или даже полностью предотвратить временнóй конфликт, причем скорость выхода из второго замедлителя, при необходимости, корректируется или оптимизируется предпочтительно таким образом, что между отцепами обеспечивается расстояние, необходимое для предотвращения соударений следующих друг за другом отцепов и для перевода стрелок. В результате также в этом случае возникает тем самым возможность сокращения временнóго интервала между следующими друг за другом отцепами и, таким образом, повышения перерабатывающей способности сортировочной горки.
В отношении системы управления сортировочной горкой в основе изобретения лежит задача создания системы управления, которая обеспечивала бы повышение перерабатывающей способности соответствующей сортировочной горки.
Эта задача решается согласно изобретению посредством системы управления сортировочной горкой, причем она выполнена с возможностью определения для соответствующих отцепов в виде скатывающихся вагонов или групп вагонов для первого замедлителя, исходя из заданной скорости выхода из него по меньшей мере одного значения скорости входа в него, для лежащего по отношению к первому замедлителю вверх в горку второго замедлителя, исходя из по меньшей мере одного полученного значения скорости входа в первый замедлитель, определения по меньшей мере одного значения скорости выхода из второго замедлителя и управления им с учетом по меньшей мере одного полученного значения скорости выхода.
Преимущества системы управления соответствуют преимуществам способа, так что в этом отношении следует сослаться на соответствующие предшествующие пояснения. То же относится касательно приведенных ниже предпочтительных усовершенствований системы управления к соответствующим предпочтительным усовершенствованиям способа, так что также в этом отношении сослаться на соответствующие предшествующие пояснения.
Преимущественно система управления выполнена с возможностью определения по меньшей мере одного значения скорости входа в первый замедлитель с учетом его работоспособности и свойств соответствующего отцепа.
Согласно одному предпочтительному варианту система управления выполнена с возможностью учета в качестве свойств соответствующего отцепа массы, числа осей, распределения массы по осям и/или сопротивления движению.
Согласно другому особенно предпочтительному варианту система управления выполнена с возможностью регистрации по отношению к соответствующим отцепам соответственно по меньшей мере одного измеренного значения и адаптивного регулирования работоспособности первого замедлителя с помощью по меньшей мере одного зарегистрированного измеренного значения, учтенной при определении по меньшей мере одного измеренного значения скорости входа в первый замедлитель.
Преимущественно система управления может быть выполнена также с возможностью учета при определении по меньшей мере одного измеренного значения скорости входа в первый замедлитель работоспособности, уменьшенной по сравнению с его максимальной работоспособностью.
Согласно одному особенно предпочтительному варианту, система управления выполнена с возможностью определения по меньшей мере одного значения скорости входа во второй замедлитель, исходя из, по меньшей мере одного полученного значения скорости выхода из него, для лежащего по отношению ко второму замедлителю вверх в горку третьего замедлителя, исходя из по меньшей мере одного полученного значения скорости входа во второй замедлитель по меньшей мере одного значения скорости выхода из третьего замедлителя и управления третьим замедлителем с учетом по меньшей мере одного полученного значения скорости выхода из него.
Предпочтительным образом система управления может быть выполнена также с возможностью учета при управлении вторым замедлителем отцепа, предшествующего соответствующему отцепу и/или следующего за соответствующим отцепом.
Преимущественно система управления усовершенствована далее таким образом, что первый замедлитель является парковым замедлителем, а второй - замедлителем нижней тормозной позиции.
Изобретение более подробно поясняется ниже на примерах его осуществления.
На чертежах изображают:
- Фиг.1 - блок-схему примера выполнения сортировочной горки с примером выполнения устройства управления;
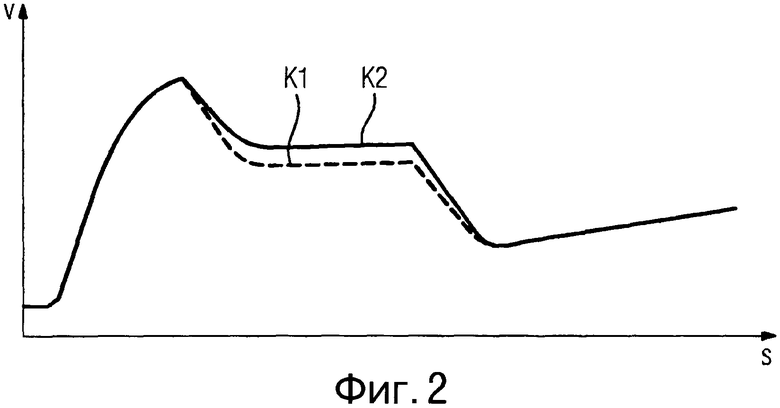
- Фиг.2 - с помощью диаграммы скорость - время сравнение кривых, возникающих для отцепа с управлением и без управления замедлителями сортировочной горки в соответствии с примером осуществления способа;
- Фиг.3 - с помощью диаграммы время - путь сравнения кривых, возникающих для отцепа с управлением и без управления замедлителями сортировочной горки в соответствии с примером осуществления способа.
На Фиг.1 в виде блок-схемы изображен пример выполнения сортировочной горки 10 с примером выполнения системы управления. Верхняя часть Фиг.1 представляет схему путей сортировочной горки 10, а нижняя часть - ее профиль или продольный разрез.
Сортировочная горка 10, являющаяся составной частью оборудования для выполнения маневровых работ, содержит скоростной уклон 20, к которому примыкают промежуточный уклон 30, стрелочная зона 40 с разделительными стрелками 80-86 и сортировочные пути 50-57. Кроме того, показаны вагонные замедлители в виде замедлителей 60, 61 нижней тормозной позиции и парковых замедлителей 70-77.
Помимо названных компонентов сортировочной горки 10 показаны отцепы 100, 101, которые надвинуты горочным локомотивом 110 на ее горб и под действием силы тяжести движутся затем вдоль сортировочной горки 10.
Для управления замедлителями в виде замедлителей 60, 61 нижней тормозной позиции показано устройство управления 200 этими замедлителями, связанное с ними посредством коммуникационных соединений 210, 211, которые могут быть выполнены проводными или же беспроводными. Соответствующим образом парковые замедлители 70-77 посредством коммуникационной техники связаны с устройством управления 220 ими. При этом для наглядности показано лишь одно соответствующее коммуникационное соединение 221 между парковым замедлителем 77 и устройством управления 220. Устройства управления 200, 220 соответственно посредством коммуникационных соединений 231, 232 связаны с центральным устройством управления 230 сортировочной горки 10. Это значит, что за счет компонентов 200, 220, 230, в целом, образована система управления в виде распределенной системы управления замедлителями 60, 61 нижней тормозной позиции и парковыми замедлителями 70-77. В качестве альтернативы этому, разумеется, возможно, чтобы замедлители 60, 61 нижней тормозной позиции и парковые замедлители 70-77 были связаны непосредственно с центральным устройством управления 230.
Согласно одному примеру осуществления способа управление замедлителями 60, 61, 70-77 происходит за счет оптимизации соответствующих скоростей отцепов 100, 101. В рамках описанного примера предполагается, что отцеп 100 предназначен для сортировочного пути 50 и поэтому на пути своего движения он проходит сначала через замедлитель 60, а затем через замедлитель 70.
Начиная с замедлителя, лежащего на предусмотренном пути движения отцепа 100 дальше всего под горку, т.е. с паркового замедлителя 70, для этого замедлителя, исходя из заданной скорости выхода из него, определяется по меньшей мере одно значение скорости входа в него. При этом предполагается, что заданная скорость выхода из замедлителей 70-77 установлена или задана на единое значение, например 1,5 м/с. Исходя из этой заданной скорости выхода из первого замедлителя в виде паркового замедлителя 70, а именно прежде чем отцеп 100 достигнет замедлителя 60 нижней тормозной позиции, с учетом работоспособности замедлителя 70 и с учетом свойств отцепа 100 определяется или прогнозируется по меньшей мере одно значение скорости входа в замедлитель 70. У полученных таким образом значений скорости входа речь идет преимущественно о семействе значений скорости или об ограниченном нижним и верхним значениями диапазоне значений скорости входа. При этом по меньшей мере одно полученное значение скорости входа в замедлитель 70 является преимущественно специфическим для отцепа 100, т.е. с учетом, например, массы, числа осей, распределения массы по осям и сопротивления движению отцепа 100, оно выбрано таким образом, что лежит между нижним и верхним предельными значениями. При этом нижнее предельное значение определяется предпочтительным образом минимальной скоростью, при которой отцеп 100 покидает замедлитель 70 без выполненной им работы торможения с заданной скоростью выхода. Напротив, верхнее предельное значение соответствует максимальной скорости, при которой еще надежно возможно затормаживание отцепа 100 до заданной скорости выхода из замедлителя 70. Чтобы предотвратить при этом систематическую перегрузку замедлителя 70, т.е. его длительную эксплуатацию в диапазоне максимальной пропускной способности, можно при определении скорости входа в замедлитель 70 установить или учесть работоспособность, уменьшенную по сравнению с максимальной работоспособностью замедлителя 70. Кроме того, в целях учета, например, явлений старения или дефектов замедлителя 70 может осуществляться регистрация измеренных значений, например, в виде скорости входа в него и выхода из него. Это позволяет, например, на основе статистического рассмотрения с учетом запротоколированных во временнóй характеристике ступеней торможения осуществить для большого числа отцепов адаптивное регулирование работоспособности замедлителя 70, учтенной при определении скорости входа в него.
Исходя из по меньшей мере одного полученного таким образом значения скорости входа в первый замедлитель 70, для лежащего по отношению к нему вверх в горку второго замедлителя в виде замедлителя 60 нижней тормозной позиции определяется по меньшей мере одно значение скорости выхода из него. Это значит, что преимущественно снова с учетом свойств отцепа 100 определяются такие значения скорости выхода из замедлителя 60, при которых гарантировано, что скорость входа в замедлитель 70 будет лежать в диапазоне по меньшей мере одного полученного значения скорости входа или в случае полученного максимального значения скорости входа оно не будет превышено.
В результате способа, тем самым за счет охватывающего замедлители рассмотрения может осуществляться управление замедлителем 60 с учетом по меньшей мере одного значения скорости выхода из него.
Следует указать на то, что свойства соответствующего отцепа, учитываемые в рамках способа, измеряются преимущественно в зоне горба горки или определяются по соответствующим измеренным параметрам.
Для осуществления способа система управления, образованная устройствами управления 230, 200, 220, содержит помимо компонентов аппаратного обеспечения, например, в виде соответствующих процессоров и средств памяти, также компоненты программного обеспечения, например, в виде программного кода для симуляции ходовых качеств отцепов 100, 101. В этой связи следует указать на то, что при управлении замедлителями 60, 61, 70-77 учитываются преимущественно отцеп 101, следующий за отцепом 100, и отцеп, при необходимости, предшествующий ему. При этом следует рассматривать, в частности, соответствующий общий путь движения отцепов 100, 101, чтобы избежать нагонов и обеспечить надежный перевод разделительных стрелок 80-86 в стрелочной зоне 40. Кроме того, в рамках способа могут учитываться и другие краевые условия, например максимальные скорости прохождения по пути движения.
На Фиг.2 в виде диаграммы скорость - время показано сравнение кривых, возникающих для отцепа с управлением и без управления замедлителями сортировочной горки в соответствии с примером осуществления способа. Скорость v показана как функция места s в виде кривых K1, K2, причем кривая K2 возникает в результате применения примера осуществления способа, а кривая K1 представляет собой кривую сравнения, у которой управление замедлителями происходит соответственно исключительно только от замедлителя к замедлителю, т.е. не описанным выше, охватывающим замедлители образом.
На Фиг.2, схематично показывающей результат соответствующей симуляции, видно, что за счет предложенного способа в зоне между замедлителем нижней тормозной позиции и парковым замедлителем, положение которых характеризуется соответственно сильным изменением скорости, возникает более высокая скорость отцепа 100. Так, из замедлителя нижней тормозной позиции можно дать выйти, в частности, с более высокой скоростью легким отцепам, поскольку известно, что для них в соответствующем парковом замедлителе требуется уменьшить лишь сравнительно небольшую кинетическую энергию. За счет этого достигается более быстрое прохождение стрелочной зоны, а в случае подходящего предшествующего отцепа 100 - уменьшение временнóго интервала между следующими друг за другом отцепами 100, 101, что обеспечивает повышение перерабатывающей способности сортировочной горки.
Следует указать на то, что преимущества способа проявляются, в частности, в случае асимметричных сортировочных горок, у которых сумма сопротивлений движению по разным путям сильно отличается друг от друга.
На Фиг.3 в виде диаграммы время - путь показано сравнение кривых, возникающих для отцепа с управлением и без управления замедлителями сортировочной горки в соответствии с примером осуществления способа. Время t показано как функция места s в виде кривых K3, K4, причем кривая K4 возникает в результате применения примера осуществления способа, а кривая K3 представляет собой кривую сравнения, у которой в основу было положено управление замедлителями соответственно исключительно только от замедлителя к замедлителю, т.е. не охватывая их. Временнóй промежуток между кривыми K3, K4 в соответствующем месте s представляет собой соответствующий, достигнутый способом выигрыш во времени. Также в этом случае хорошо видно, что способ или описанный пример его осуществления обеспечивает ускоренное прохождение сортировочной горки соответствующими отцепами.
Следует указать на то, что в отличие от примеров на Фиг.2, 3 управление замедлителем 60 возможно также в таком виде, что соответствующий отцеп выпускается из него с меньшей по сравнению с кривой K1 скоростью выхода. За счет этого можно, в частности, избежать намечающихся в противном случае по отношению к предшествующему отцепу временных конфликтов, т.е. в частности, грозящих нагонов или недостаточных отрезков времени для перевода разделительных стрелок. За счет вызванного этим уравнивания кривых впереди идущего отцепа 100 и следующего за предыдущим отцепа 101 на их совместном пути движения до последнего предельного столбика можно, наконец, также сократить временнóй интервал между следующими друг за другом отцепами и тем самым повысить перерабатывающую способность сортировочной горки.
Резюмируя вышесказанное, можно, следовательно, констатировать, что описанный способ и соответствующая система управления замедлителями сортировочной горки за счет охватывающего замедлители рассмотрения соответствующих скоростей входа и заданных скоростей выхода обеспечивают общую оптимизацию временных интервалов между следующими друг за другом отцепами. При этом по сравнению с управлением по отношению к постоянной скорости входа в следующий замедлитель в зависимости от соответствующих условий, в частности с учетом предшествующих и/или последующих отцепов, по отношению к соответствующему отцепу может осуществляться оптимизация в отношении ускоренного или замедленного прохождения сортировочной горки соответствующим отцепом. Это приводит, в конце концов, к повышению перерабатывающей способности соответствующей сортировочной горки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЭКСПЛУАТАЦИИ СОРТИРОВОЧНОЙ ГОРКИ ПРИ РАНЖИРОВКЕ И УСТРОЙСТВО УПРАВЛЕНИЯ СОРТИРОВОЧНОЙ ГОРКОЙ | 2018 |
|
RU2741459C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ МАНЕВРОВОЙ СОРТИРОВОЧНОЙ ГОРКИ, А ТАКЖЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ УКАЗАННОЙ ГОРКИ | 2016 |
|
RU2677546C1 |
| СПОСОБ ЭКСПЛУАТАЦИИ МАНЕВРОВОЙ СОРТИРОВОЧНОЙ ГОРКИ, А ТАКЖЕ УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ УКАЗАННОЙ ГОРКИ | 2016 |
|
RU2673913C1 |
| Устройство для управления технологическим процессом роспуска составов на сортировочной горке | 1981 |
|
SU1073146A1 |
| СПОСОБ РАБОТЫ СОРТИРОВОЧНОЙ ГОРКИ, А ТАКЖЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ НЕЕ | 2012 |
|
RU2567785C2 |
| СПОСОБ РАБОТЫ СОРТИРОВОЧНОЙ ГОРКИ ДЛЯ РЕЛЬСОВОГО ТРАНСПОРТА, А ТАКЖЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ТАКОЙ СОРТИРОВОЧНОЙ ГОРКИ | 2011 |
|
RU2573149C2 |
| ИНТЕРАКТИВНАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОБУЧЕНИЯ ПО ПРОФЕССИЯМ ОПЕРАТОРОВ СОРТИРОВОЧНОЙ ГОРКИ | 2021 |
|
RU2748768C1 |
| РАДИОФОТОННАЯ СИСТЕМА ЛОКАЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2838248C1 |
| РАДИОФОТОННАЯ СИСТЕМА ЛОКАЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ СКОРОСТИ ОТЦЕПОВ НА СОРТИРОВОЧНОЙ ГОРКЕ | 2023 |
|
RU2812744C1 |
| Устройство для контроля коэффициента трения колес вагонов перед роспуском состава на сортировочной горке | 2024 |
|
RU2822298C1 |

Изобретение относится к области железнодорожной автоматики, в частности к управлению сортировочными горками. Техническое решение заключается в том, что для соответствующих отцепов (100, 101) в виде скатывающихся вагонов или групп вагонов для первого вагонного замедлителя (70), исходя из заданной скорости выхода из него и с учетом его работоспособности и свойств соответствующего отцепа (100, 101), определяют по меньшей мере одно значение скорости входа в первый замедлитель (70), а для лежащего по отношению к первому замедлителю (70) вверх в горку второго замедлителя (60), исходя из по меньшей мере одного полученного значения скорости входа в первый замедлитель (70), определяют по меньшей мере одно значение скорости выхода из второго замедлителя (60). Причем вторым замедлителем (60) управляют с учетом, по меньшей мере, одного полученного значения скорости выхода. Достигается повышение оптимизации работы сортировочной горки и времени прохождения конкретного отцепа. 2 н. 21 з. п. ф-лы, 3 ил.
1. Способ эксплуатации сортировочной горки (10), при котором для соответствующих отцепов (100, 101) в виде скатывающихся вагонов или групп вагонов
- для первого вагонного замедлителя (70), исходя из заданной скорости выхода из него и с учетом его работоспособности и свойств соответствующего отцепа (100, 101), определяют,по меньшей мере одно значение скорости входа в первый замедлитель (70),
- для лежащего по отношению к первому замедлителю (70) вверх в горку второго замедлителя (60), исходя из по меньшей мере одного полученного значения скорости входа в первый замедлитель (70), определяют по меньшей мере одно значение скорости выхода из второго замедлителя (60) и
- вторым замедлителем (60) управляют с учетом по меньшей мере одного полученного значения скорости выхода.
2. Способ по п. 1, отличающийся тем, что в качестве свойств соответствующего отцепа (100, 101) учитывают массу, число осей, распределение массы по осям и/или сопротивление движению.
3. Способ по п. 1, отличающийся тем, что по отношению к соответствующим отцепам (100, 101) регистрируют соответственно по меньшей мере одно измеренное значение и работоспособность первого замедлителя (70), учтенную при определении по меньшей мере одного значения скорости входа в него, адаптивно регулируют с помощью, по меньшей мере, одного зарегистрированного измеренного значения.
4. Способ по п. 2, отличающийся тем, что по отношению к соответствующим отцепам (100, 101) регистрируют соответственно по меньшей мере одно измеренное значение и работоспособность первого замедлителя (70), учтенную при определении по меньшей мере одного значения скорости входа в него, адаптивно регулируют с помощью по меньшей мере одного зарегистрированного измеренного значения.
5. Способ по п. 1, отличающийся тем, что при определении по меньшей мере одного значения скорости входа в первый замедлитель (70) учитывают работоспособность, уменьшенную по сравнению с его максимальной работоспособностью.
6. Способ по п. 2, отличающийся тем, что при определении по меньшей мере одного значения скорости входа в первый замедлитель (70) учитывают работоспособность, уменьшенную по сравнению с его максимальной работоспособностью.
7. Способ по п. 3, отличающийся тем, что при определении по меньшей мере одного значения скорости входа в первый замедлитель (70) учитывают работоспособность, уменьшенную по сравнению с его максимальной работоспособностью.
8. Способ по п. 4, отличающийся тем, что при определении по меньшей мере одного значения скорости входа в первый замедлитель (70) учитывают работоспособность, уменьшенную по сравнению с его максимальной работоспособностью.
9. Способ по любому из пп. 1-8, отличающийся тем, что
- исходя из по меньшей мере одного полученного значения скорости выхода из второго замедлителя (60) определяют по меньшей мере одно значение скорости входа в него,
- для лежащего по отношению ко второму замедлителю (60) вверх в горку третьего замедлителя, исходя из по меньшей мере одного полученного значения скорости входа во второй замедлитель (60), определяют по меньшей мереодно значение скорости выхода из третьего замедлителя и
- третьим замедлителем управляют с учетом по меньшей мере одного полученного значения скорости выхода из него.
10. Способ по любому из пп. 1-8, отличающийся тем, что в случае первого замедлителя (70) в виде паркового замедлителя вторым замедлителем (60) управляют в виде замедлителя нижней тормозной позиции.
11. Способ по п. 9, отличающийся тем, что в случае первого замедлителя (70) в виде паркового замедлителя вторым замедлителем (60) управляют в виде замедлителя нижней тормозной позиции.
12. Способ по любому из пп. 1-8, отличающийся тем, что при управлении вторым замедлителем (60) учитывают отцеп (101), предшествующий соответствующему отцепу (например, 100) и/или следующий за соответствующим отцепом.
13. Система управления (200, 220, 230) сортировочной горкой (10), причем она выполнена с возможностью определения для соответствующих отцепов в виде скатывающихся вагонов или групп вагонов
- для первого замедлителя (70), исходя из заданной скорости выхода из него и с учетом его работоспособности и свойств соответствующего отцепа (100, 101), по меньшей мере одного значения скорости входа в него,
- для лежащего по отношению к первому замедлителю (70) вверх в горку второго замедлителя (60), исходя из,по меньшей мере одного полученного значения скорости входа в первый замедлитель (70), по меньшей мере одного значения скорости выхода из второго замедлителя (60) и
- управления вторым замедлителем (60) с учетом по меньшей мере одного полученного значения скорости выхода.
14. Система по п. 13, отличающаяся тем, что она выполнена с возможностью учета в качестве свойств соответствующего отцепа (100, 101) массы, числа осей, распределения массы по осям и/или сопротивления движению.
15. Система по п. 13, отличающаяся тем, что она выполнена с возможностью
- регистрации по отношению к соответствующим отцепам (100, 101) соответственно по меньшей мере одного измеренного значения и
- адаптивного регулирования работоспособности первого замедлителя (70) с помощью по меньшей мере одного зарегистрированного измеренного значения, учтенной при определении, по меньшей мере одного измеренного значения скорости входа в первый замедлитель (70).
16. Система по п. 14, отличающаяся тем, что она выполнена с возможностью
- регистрации по отношению к соответствующим отцепам (100, 101) соответственно по меньшей мере одного измеренного значения и
- адаптивного регулирования работоспособности первого замедлителя (70) с помощью по меньшей мере одного зарегистрированного измеренного значения, учтенной при определении по меньшей мере одного измеренного значения скорости входа в первый замедлитель (70).
17. Система по п. 13, отличающаяся тем, что она выполнена с возможностью учета при определении по меньшей мере одного измеренного значения скорости входа в первый замедлитель (70) работоспособности, уменьшенной по сравнению с его максимальной работоспособностью.
18. Система по п. 14, отличающаяся тем, что она выполнена с возможностью учета при определении по меньшей мере одного измеренного значения скорости входа в первый замедлитель (70) работоспособности, уменьшенной по сравнению с его максимальной работоспособностью.
19. Система по п. 15, отличающаяся тем, что она выполнена с возможностью учета при определении по меньшей мере одного измеренного значения скорости входа в первый замедлитель (70) работоспособности, уменьшенной по сравнению с его максимальной работоспособностью.
20. Система по п. 16, отличающаяся тем, что она выполнена с возможностью учета при определении по меньшей мере одного измеренного значения скорости входа в первый замедлитель (70) работоспособности, уменьшенной по сравнению с его максимальной работоспособностью.
21. Система по любому из пп. 13-20, отличающаяся тем, что она выполнена с возможностью
- определения по меньшей мере одного значения скорости входа во второй замедлитель (60), исходя из по меньшей мере,одного полученного значения скорости выхода из него,
- для лежащего по отношению ко второму замедлителю (60) вверх в горку третьего замедлителя, исходя из по меньшей мере,одного полученного значения скорости входа во второй замедлитель (60), по меньшей мере одного значения скорости выхода из третьего замедлителя и
- управления третьим замедлителем с учетом по меньшей мере одного полученного значения скорости выхода из него.
22. Система по любому из пп. 13-20, отличающаяся тем, что она выполнена с возможностью учета при управлении вторым замедлителем (60) отцепа (101), предшествующего соответствующему отцепу (например, 100) и/или следующего за соответствующим отцепом.
23. Система по п. 21, отличающаяся тем, что она выполнена с возможностью учета при управлении вторым замедлителем (60) отцепа (101), предшествующего соответствующему отцепу (например, 100) и/или следующего за соответствующим отцепом.
| DE 3019950 A1, 03.12.1981 | |||
| US 4610206 A1, 09.09.1986 | |||
| Грохот со свободным движением и резонансными успокоителями | 1949 |
|
SU87132A1 |
| ЗАМЕДЛИТЕЛЬ ВАГОННЫЙ ЭЛЕКТРОМАГНИТНЫЙ | 1994 |
|
RU2080269C1 |
| RU 94012945 A1, 20.03.1996. | |||

