Изобретение относится к области радиолокационной техники и предназначено для индивидуальной защиты радиолокационных комплексов обнаружения воздушных целей и управления оружием класса «земля-воздух» в условиях применения противником разведывательно-ударных комплексов (РУК) типа PLSS (Precision Location Strike System, далее по тексту ПЛСС) с разностно-дальномерной системой радиотехнической разведки (РТР) и командной системой наведения управляемого оружия по данным разведки.
Известна когерентно-импульсная радиолокационная станция (см. патент РФ №2058565, GO1S 13/52, 1996), содержащая приемо-передающую антенну, приемник, синхронизатор, генератор гребенки импульсов, передатчик, N цепочек, каждая из которых состоит из последовательно соединенных ключа, доплеровского фильтра и блока накопления, индикатор, высотомер, селектор режима стробирования. Генератор гребенки импульсов содержит последовательно соединенные управляемый элемент задержки N-блокинг-генераторов. Синхронизатор содержит коммутатор, генераторы импульсов, формирователь стробирующих импульсов. Селектор стробирования содержит генератор меандра, регулятор задержки. Регулятор задержки содержит сумматор, элемент «И», источник постоянного напряжения.
Основным недостатком такой РЛС является низкая степень защищенности от РУК типа ПЛЛС, что обусловлено возможностью радиотехнической разведки их сигналов, излучаемых по боковым лепесткам диаграммы направленности антенны (ДНА) из пространственно-разнесенных точек разностно-дальномерным способом с последующим высокоточным определением местоположения РЛС по точке пересечения гиперболических линий положения цели, построенных для системы РТР из трех самолетов-разведчиков (CP) (см. Афинов В.В. Развитие в США высокоточного оружия и перспективы создания разведывательно-ударных комплексов, Военная мысль, №4, 1983, с.65).
Известна также когерентно-импульсная радиолокационная станция (см. патент РФ №27713, GO1S 13/52, 2003), содержащая последовательно соединенные передающее устройство, антенный переключатель и направленный ответвитель, к выходу основного плеча которого подсоединена приемо-передающая антенна, последовательно соединенные усилитель высокой частоты, вход которого подсоединен к третьему плечу антенного переключателя, первый смеситель, первый фильтр промежуточной частоты и первый усилитель промежуточной частоты, выход которого соединен с первым входом блока обработки сигналов, последовательно соединенные второй смеситель, вход которого подсоединен к выходу вспомогательного плеча направленного ответвителя, второй фильтр промежуточной частоты и второй усилитель промежуточной частоты, выход которого соединен с вторым входом блока обработки сигналов, первый гетеродин, подключенный соответственно к гетеродинным входам первого и второго смесителей, и индикаторное устройство, подсоединенное к выходу блока обработки сигналов. Блок обработки сигналов содержит два квадратурных фазовых детектора, четыре аналого-цифровых преобразователя, опорный генератор, синхронизатор, последовательно соединенные блок приведения фазы, блок памяти, блок спектрального анализа, блок пороговой обработки, блок экстремальной обработки и блок формирования отметок целей, при этом входы первого и второго квадратурных фазовых детекторов являются соответственно первым и вторым входами блока обработки сигналов, а их опорные входы подключены к выходу опорного генератора, выходы синусных и косинусных каналов первого и второго квадратурных фазовых детекторов соединены соответственно с входами первого, второго, третьего и четвертого аналого-цифровых преобразователей, тактовые входы которых подсоединены соответственно к выходам синхронизатора, выходы аналого-цифровых преобразователей подключены соответственно к блокам входа приведения фазы, выход блока формирования отметок целей является выходом блока обработки сигналов, а второй вход блока формирования отметок целей является входом сигнала датчика азимута приемо-передающей антенны.
Суть изобретений, изложенных в этих патентах, состоит в улучшении качества приема отраженного от цели сигнала за счет новых технических решений при его обработке в РЛС. Однако описанные в этих патентах когерентно-импульсные РЛС также не защищены от обнаружения РУК типа ПЛСС разностно-дальномерным способом по боковым лепесткам ДНА.
Наиболее близкой по назначению и технической сущности к предлагаемому изобретению является когерентно-импульсная РЛС (см. патент РФ №2454678, GO1S 7/36, 2012), содержащая последовательно соединенные задающий генератор, синхронизатор, импульсный модулятор и последовательно соединенные первый усилитель мощности, ко второму входу которого подключен выход задающего генератора, приемо-передающее антенное устройство и приемное устройство, второй вход которого подключен к выходу задающего генератора, а третий - к выходу синхронизатора, первую линию задержки, последовательно соединенные первый формирователь импульсов, второй усилитель мощности и первое передающее антенное устройство и последовательно соединенные вторую линию задержки, ко входу которой подключен вход первого формирователя импульсов, второй формирователь импульсов, третий усилитель мощности, ко второму входу которого подключен выход задающего генератора и второе передающее антенное устройство, при этом время задержки второй линии задержки τлз2 по отношению ко времени задержки первой линии задержки τлз1 выбирается из условия
Δτ=(τлз1-τлз2)≥τ0,
где τ0 - длительность импульса основного сигнала, при этом τ0≈τ∂, где τ∂ - длительность импульсов дополнительных сигналов, а коэффициенты усиления по мощности второго и третьего усилителей мощности Kу должны удовлетворять условиям
 ,
,
где Kу1 - коэффициент усиления по мощности первого усилителя мощности, G1 - коэффициент усиления приемо-передающего антенного устройства, G - коэффициенты усиления первого и второго антенных устройств.
Данная РЛС обладает повышенной скрытностью от средств РТР, ведущих разведку по боковым лепесткам диаграммы направленности антенны РЛС за счет возможности формирования серии дополнительных импульсов, несущих ложную информацию о местоположении РЛС, затрудняющих выбор истинных импульсов (меток) среди ложных разностно-дальномерной системой РТР.
Недостатком этой РЛС является принципиальная возможность определения местоположения РЛС, как стационарного объекта, за счет попарного анализа совокупности формируемых дополнительных импульсов.
Задачей данного изобретения является снижение вероятности поражения когерентно-импульсной РЛС управляемым оружием разведывательно-ударного комплекса типа ПЛСС, предназначенного для поражения стационарных объектов, вплоть до исключения РЛС из числа объектов поражения РУК за счет формирования дополнительных сигналов, обеспечивающих создание периодически нарастающих по времени ошибок определения ее местоположения и имитирующих ее движение.
Технический результат достигается за счет того, что в известную когерентно-импульсную РЛС, содержащую последовательно соединенные задающий генератор, синхронизатор, импульсный модулятор, первую линию задержки, первый усилитель мощности, ко второму входу которого подключен выход задающего генератора, приемо-передающее антенное устройство и приемное устройство, второй вход которого подключен к выходу задающего генератора, а третий - к выходу синхронизатора, последовательно соединенные первый формирователь импульсов, второй усилитель мощности, первое передающее антенное устройство и последовательно соединенные вторую линию задержки, к первому входу которой подключен выход импульсного модулятора, второй формирователь импульсов, третий усилитель мощности, ко второму входу которого подключен выход задающего генератора и второе передающее антенное устройство, а коэффициенты усиления по мощности второго и третьего усилителей мощности Kу удовлетворяют условию
 ,
,
где Kу1 - коэффициент усиления по мощности первого усилителя мощности, G1 - коэффициент усиления приемо-передающего антенного устройства, G - коэффициенты усиления первого и второго антенных устройств, введен генератор пилообразного напряжения, подключенный ко второму входу второй линии задержки, которая выполнена управляемой, при этом время задержки первой линии задержки τлз1 и максимальное время задержки второй управляемой линии задержки τулз2max выбирают из условий
τлз1≤τ∂1-τ0,
τулз2max≤τлз1,
где τ∂1, τ0 - длительности импульсов дополнительного и основного сигналов соответственно, а первый и второй формирователи импульсов выполнены в виде ждущих мультивибраторов.
Физическая сущность и отличительная особенность изобретения состоит в том, что введение в РЛС генератора пилообразного напряжения, управляющего временем задержки второй линии задержки путем формирования периодически меняющихся во времени дополнительных сигналов, приводит к созданию непрерывно изменяющихся систематических ошибок определения ее местоположения и, следовательно, к снижению вероятности поражения когерентно-импульсной РЛС, вплоть до исключения ее из числа объектов поражения РУК типа ПЛСС, действующего только по стационарным объектам.
Проведенный анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностью признаков, идентичных всем признакам заявляемого технического решения, отсутствуют, что указывает на соответствие заявляемого изобретения условию патентоспособности «новизна».
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными признаками заявляемого устройства, показали, что они не следуют явным образом из уровня техники и не подтверждена известность влияния отличительных признаков на заявляемый технический результат (снижение вероятности поражения когерентно-импульсных РЛС управляемым оружием РУК типа ПЛСС). Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
Заявляемое техническое решение промышленно применимо, так как оно может быть использовано в военно-промышленном комплексе, и для его реализации могут быть использованы стандартное оборудование и материалы.
На фиг.1 приведена структурная схема когерентно-импульсной РЛС, на фиг.2 - структурная схема управляемой N-отводной линии задержки с устройством управления временем задержки, на фиг.3 - эпюры напряжений, поясняющие работу РЛС, на фиг.4 - геометрия расположения РЛС относительно самолетов разведчиков РУК.
Когерентно-импульсная РЛС (фиг.1) содержит последовательно соединенные задающий генератор 1, синхронизатор 2, импульсный модулятор 3, первую линию задержки 4.1, первый усилитель мощности 5.1, второй вход которого подключен к задающему генератору 1, приемо-передающее антенное устройство 6 и приемное устройство 7, второй вход которого подключен к задающему генератору 1, а третий к выходу синхронизатора 2, подключенные ко второму выходу импульсного модулятора 3 последовательно соединенные первый ждущий мультивибратор 8.1, второй усилитель мощности 5.2, второй вход которого подключен к выходу задающего генератора 1, первое передающее антенное устройство 9.1, а также последовательно соединенные генератор пилообразного напряжения 10, вторую управляемую линию задержки 4.2, второй ждущий мультивибратор 8.2, третий усилитель мощности 5.3, второй вход которого подключен к задающему генератору 1, и второе передающее антенное устройство 9.2.
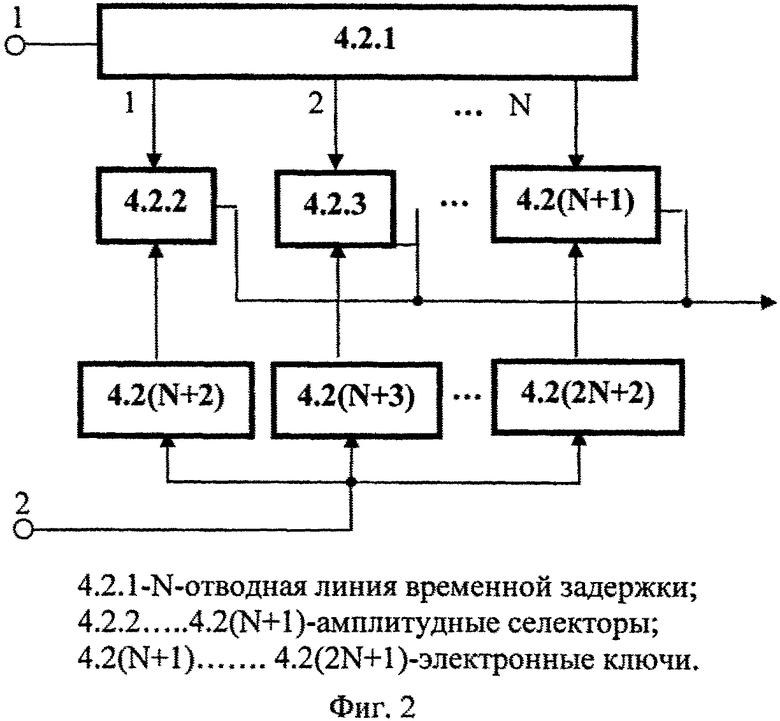
Вторая управляемая линия задержки 4.2 содержит (см. фиг.2) N-отводную линию временной задержки 4.2.1 (см. В.К. Слока. Вопросы обработки радиолокационных сигналов. М.: Сов. Радио. 1970, с.178-180), вход которой является первым входом управляемой линии задержки 4.2 и подключен к выходу импульсного генератора 10, электронные ключи 4.2.2, 4.2.3…4.2(N+1) и амплитудные селекторы 4.2(N+2), 4.2(N+3)…4.2(2N+1), которые могут быть выполнены как любые двухуровневые амплитудные селекторы (см. Я.С. Ицхоки, Н.И. Овчинников. Импульсные и цифровые устройства. М.: Сов. Радио. 1973, с.552).
Первые входы электронных ключей 4.2.2, 4.2.3…4.2(N+1) подключены к выводам N-отводной линии временной задержки 4.2.1, вторые входы - к выходам амплитудных селекторов 4.2(N+2), 4.2(N+3)…4.2(2N+1), входы которых подключены к общему второму входу второй управляемой линия задержки 4.2, соединенному с выходом генератора пилообразного напряжения 10.
Выходы электронных ключей 4.2.2, 4.2.3…4.2(N+1) выведены на общую шину, являющуюся выходом управляемой линии задержки.
Приемо-передающее антенное устройство 6 является основным антенным устройством РЛС. Оно может быть выполнено в виде стандартных антенных устройств (зеркальных, линзовых, фазированных антенных решеток и др. см. Справочник по радиолокации. / Под ред. М. Сколника, т.2. М.: Сов радио, 1977, 405 с.).
Первое и второе передающие антенные устройства 9.1 и 9.2, излучающие дополнительные импульсы, являются вспомогательными антенными устройствами и выполнены в виде апертурных антенн. Антенные устройства 9.1 и 9.2 имеют ширину главного лепестка диаграммы направленности 90° в азимутальной плоскости и не менее 12° в угломестной плоскости и ориентированы под углом ±45° к нормали на линию полетов разведывательных самолетов РУК типа ПЛСС (фиг.4). В качестве антенных устройств с такими диаграммами могут использоваться рупорные антенны (см. Жук М.С., Молочков Ю.Б. Проектирование антенно-фидерных устройств. М.: Энергия, 1966, 647 с.).
Коэффициент усиления второго и третьего (вспомогательных) усилителей мощности 5.2 и 5.3 лежит в пределах

где Kу1 - коэффициент усиления первого усилителя мощности 5; G1 - коэффициент усиления основного антенного устройства 6, то есть доля излучения РЛС, которая приходится на боковые и задние лепестки диаграммы направленности антенного устройства; Pзг - мощность сигнала на выходе задающего генератора 1, Вт, Gбок - коэффициент усиления вспомогательных устройств (9.1, 9.2) по первому лепестку диаграммы направленности; λ - длина волны, м.
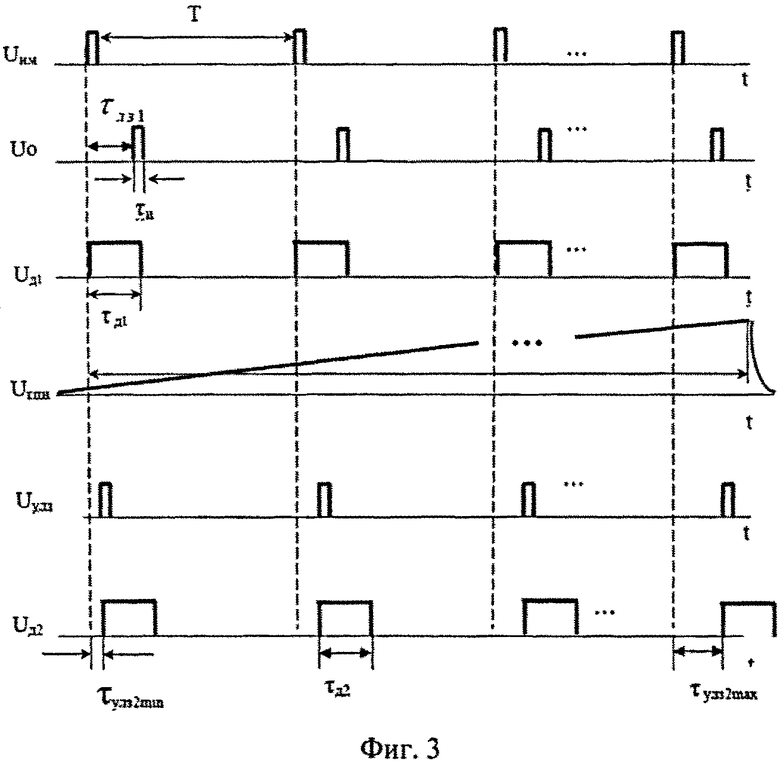
Когерентно-импульсная РЛС работает следующим образом (фиг.3). Задающий генератор 1 создает непрерывные колебания, которые подвергаются импульсной модуляции (Uим) с периодом следования (T), составляющем для типовых когерентно-импульсных РЛС не менее 100 мкс, усиливаются в первом усилителе мощности 5.1 и излучаются антенным устройством 6 с задержкой по времени на τлз1=2-5 мкс (U0), определяемой наличием в основном тракте РЛС первой линии задержки 4.1. После отражения от цели они принимаются антенным устройством 6 и обрабатываются в приемном устройстве 7. Импульсный модулятор 3 управляется импульсами синхронизатора 2, которые фазируются колебаниями задающего генератора 1.
Синхронно с сигналами, излучаемыми основным антенным устройством 6, первым и вторым вспомогательными антенными устройствами 9.1, 9.2, излучаются серии дополнительных импульсов (Uд1, Uд2), предварительно сформированные ждущими мультивибраторами 8.1, 8.2, усиленные и подвергшиеся импульсной модуляции во втором и третьем усилителях мощности 5.2, 5.3. Использование ждущих мультивибраторов позволяет вырабатывать дополнительные прямоугольные импульсы с требуемой амплитудой и длительностью.
Благодаря наличию первой линии задержки 4.1, сигналы, излучаемые вспомогательными антеннами 9.1, 9.2, опережают по времени сигнал, излучаемый основным антенным устройством 6, на время задержки τлз1=const, величина которого превышает длительность импульсов, формируемых в основном тракте. При этом длительность импульсов дополнительного сигнала, формируемых ждущим мультивибратором 8.1, должна быть не менее времени задержки основного сигнала, то есть τ∂1≥τлз1+τ0. Таким образом, время задержки первой линии задержки должно удовлетворять условию

Наличие второй управляемой линии задержки 4.2 обеспечивает нарастание от импульса к импульсу задержки по времени дополнительных сигналов, излучаемых вторым передающим антенным устройством 9.2 (Uд2), относительно сигналов, излучаемых первым передающим антенным устройством 9.1 (Uд1).
Выбор максимального времени задержки второй управляемой линии задержки 4.2 осуществляется из условия постоянного «перекрытия» основного (U0) и второго дополнительного (Uд2) сигналов, то есть максимальное значение времени задержки сигналов, излучаемых вторым передающим антенным устройством 9.2 (Uд2), не должно превышать времени задержки сигналов, излучаемых первым передающим антенным устройством 9.1 (Uд1)

Управление временем задержки (τулз2) сигналов, излучаемых вторым передающим антенным устройством 9.2, осуществляется с помощью генератора пилообразного напряжения 10, с выхода которого управляющее напряжение (UГПН) передается на второй вход управляемой линии задержки 4.2 (см. фиг.3) и через амплитудные селекторы 4.2(N+2), 4.2(N+3)…4.2(2N+1) поступают на вторые входы электронных ключей 4.2.2, 4.2.3…4.2(N+1), первые входы которых подключены к соответствующим выходам N-отводной линии временной задержки 4.2.1.
Параметры управляющего напряжения UГПН (длительность линейного участка tл, период восстановления tв, период повторения ТГПН, амплитуда линейного участка Uл) выбираются из требуемого максимального значения времени задержки τулз2max и требуемой скорости увода по времени сигнала, излучаемого вторым передающим антенным устройством 9.2 (требуемой скорости переключения выводов N-отводной линии временной задержки 4.2.1), соответствующей скорости имитируемого движения РЛС (vц=5…15 м/с).
Линейно нарастающие в течение нескольких периодов излучения сигнала управляющее напряжение UГПН с выхода генератора пилообразного напряжения 10 поступают на вторые входы ключей 4.2.2, 4.2.3…4.2(N+1) через амплитудные селекторы уровня напряжения 4.2(N+2), 4.2(N+3)…4.2(2N+1), сигнал на выходе которых появляется, когда управляющее напряжение UГПН находится в заданных пределах
 ,
,
где  ,
,  - минимальное и максимальное пороговые напряжения k-го амплитудного селектора 4.2(N+2), 4.2(N+3)…4.2(2N+1). Тем самым осуществляется последовательное по времени подключение через электронные ключи 4.2.2, 4.2.3…4.2(N+1) N-отводной линии временной задержки 4.2.1.
- минимальное и максимальное пороговые напряжения k-го амплитудного селектора 4.2(N+2), 4.2(N+3)…4.2(2N+1). Тем самым осуществляется последовательное по времени подключение через электронные ключи 4.2.2, 4.2.3…4.2(N+1) N-отводной линии временной задержки 4.2.1.
При наличии сигналов на обоих входах одного из электронных ключей 4.2.2, 4.2.3…4.2(N+1) сигнал Uyлз2 с соответствующего вывода N-отводной линии временной задержки 4.2.1 подается на общую шину, являющуюся выходом управляемой линии задержки 4.2 и поступает далее на вход второго ждущего мультивибратора 8.2 (см. фиг.1), формирующего дополнительный импульс (Uд2) длительностью τ∂2=τ∂1≥τлз1+τ0, передний фронт которого формируется с задержкой, соответствующей задержке сигнала, поступающего с выхода управляемой линии задержки 4.2.
В исходном состоянии передние фронты первого Uд1 и второго Uд2 дополнительных сигналов смещены по времени излучения на величину не менее 0,25 мкс.
Ширина диаграммы направленности вспомогательных антенн 9.1, 9.2 в угломестной плоскости определяется из условия попадания дополнительного сигнала на вход разведывательной аппаратуры самолетов разведки РУК типа ПЛСС, дежурная смена которых обычно включает три самолета.
При максимальной высоте полета CP H=20 км и удалении их маршрута патрулирования от линии соприкосновения войск L=100 км (см. www.6478867.com/tip-gan.pdf) ширина диаграммы направленности вспомогательных антенных устройств 9.1, 9.2 должна составлять величину не менее, чем 
Для обеспечения маскировки сигнала РЛС, излучаемого основным антенным устройством по боковым лепесткам ДНА в секторе углов 0±90° сериями дополнительных импульсов, излучаемых в этом же секторе вспомогательными антеннами, коэффициент усиления второго и третьего усилителя мощности 5.2, 5.3 должен, как и в прототипе, удовлетворять соотношению

где G - коэффициент усиления вспомогательного антенного устройства (9.1, 9.2).
При ширине главного лепестка ДН вспомогательного антенного устройства 90°×12°, а также учитывая, что коэффициент усиления антенны находится из соотношения (см. Справочник по радиолокации. Под ред. М. Сколника, т.2, М.: Сов. радио, 1977, с.56)

где θB, ψB - ширина ДНА в ортогональных плоскостях (град), G=30, получаем

Для исключения возможности обнаружения дополнительного сигнала за пределами сектора 0-90°, излучаемого первым или вторым вспомогательным антенным устройством 9.1, 9.2 по боковым лепесткам ДН, их уровень на входе приемника системы РТР РУК ПЛСС не должен превышать порога его чувствительности, то есть должно выполняться условие

где Kнп - коэффициент несовпадения поляризации сигнала РЛС и антенны разведприемника; Kпэ - коэффициент передачи сигнала от антенны на вход разведприемника; D - дальность разведки; Gпр - коэффициент усиления антенны приемника; Pпр - чувствительность приемника.
При Kнп=Kпэ=0,5, Gпр=10, Pпр=10-12 Вт и D≥L=100 км, получаем

Объединяя (6) и (8) получаем, что

Проведем пример расчета для следующих исходных данных. Примем мощность сигнала РЛС на входе основного антенного устройства Kу1PзГ=200 кВт, G1=0,5; Gбок=0,15, распределение облучения по апертуре косинусоидальным и уровень первого бокового лепестка относительно главного не больше чем 23 дБ, λ=0,03 м. Подставляя исходные данные в (7) и умножая на PзГ, получаем, что допустимые значения коэффициента усиления второго или третьего усилителя мощности 5.2, 5.3 выбираются из условия, при котором произведение Kу1PзГ (мощность сигнала на входах первого и второго вспомогательных антенных устройств) лежит в пределах от 3,3 кВт до 4,5 кВт.
Таким образом, в заявляемом устройстве, как и в прототипе, коэффициенты усиления по мощности второго и третьего усилителей мощности Kу должны удовлетворять соотношению (4).
Усилители мощности 5.2, 5.3 могут быть выполнены на стандартной элементной базе, аналогичной использованной в первом (основном) усилителе мощности 5.1 (см. Справочник по радиолокации. / Под ред. М. Сколника. т.3. М.: Сов радио, 1979, 527 с.), при этом меньший коэффициент усиления обеспечивается либо снижением количества каскадов, либо использованием менее мощных усилительных приборов.
Снижение уровня излучаемого за пределами сектора 0±90° сигнала может быть также обеспечено путем соответствующего выбора распределения облучения по апертуре антенны.
Из-за различия в уровнях основного и дополнительного сигналов, отношение которых на входе приемного устройства 7 составляет величину не менее чем коэффициент усиления основного антенного устройства 6 (в существующей радиолокационной технике он лежит в пределах 103-105), помеховое воздействие дополнительных сигналов на приемное устройство 7 РЛС не является существенным, и в случае необходимости может быть устранено путем селекции по уровню.
В РУК ПЛСС для определения местоположения импульсных РЛС используется разностно-дальномерный метод (см. Афинов В.В. Развитие в США высокоточного оружия и перспективы создания разведывательно-ударных комплексов, Военная мысль, №4, 1983, С.66), при котором измеряются моменты прихода излучаемого по боковым лепесткам ДНА РЛС сигнала на три CP (с размещенной на них аппаратурой РТР) в соответствии с уравнениями
где ti, (i=1, 2, 3) - моменты прихода сигнала РЛС аппаратурой CP; xi, yi - координаты CP в момент времени ti, c - скорость распространения радиоволн (скорость света); x, y - координаты разведываемой РЛС, определяющих две гиперболические линии положения.
При разведке РЛС, излучающей серии дополнительных импульсов, возможны три варианта. В первом варианте все CP находятся слева от нормали к линии соприкосновения войск (ЛСВ), проведенной через позицию РЛС, и измеряют моменты прихода по переднему фронту импульсов (UД1, U0) (фиг.3), излучаемых в рабочем секторе первого вспомогательного передающего устройства 9.1, во втором варианте - все три CP находятся справа от нормали к ЛСВ и измеряют моменты прихода сигналов по передним фронтам импульсов (UД2), излучаемых в рабочем секторе второго вспомогательного антенного устройства 9.2, а в третьем - на одном или двух CP момент прихода измеряется по переднему фронту сигналов (UД1), излучаемых в рабочем секторе первого вспомогательного антенного устройства 9.1, а на остальных по переднему фронту сигналов (UД2), излучаемых в рабочем секторе второго вспомогательного антенного устройства 9.2.
Как показано в прототипе, ситуации, при которых все CP находятся по одну сторону от нормали к ЛСВ маловероятны, так как точность разведки координат при этом составляет 300 м и более и вероятность поражения РЛС не превышает 0,1.
В третьем, наиболее вероятном (типовом) случае гиперболические линии положения за счет опережения одним сигналом другого на Δτ смещаются и удовлетворяют уравнению

где Δτ=τулз2.
При этом за счет управления (с заданной скоростью) временем задержки τулз2 второго дополнительного сигнала (UД2), определяемая по нему линия положения РЛС будет смещаться по времени, имитируя движение цели (изменение координат РЛС во времени).
Оценку технического результата заявляемого устройства (снижение вероятности поражения когерентно-импульсных РЛС управляемым оружием разведывательно-ударного комплекса типа ПЛСС вплоть до исключения ее из числа объектов поражения РУК за счет формирования дополнительных сигналов, обеспечивающих создание периодически нарастающих по времени ошибок определения ее местоположения), по сравнению с прототипом можно провести на основе следующих доказательств.
Применительно к прототипу при наличии систематических ошибок определения местоположения РЛС, что присуще заявляемому устройству, вероятность определения местоположения РЛС подчиняется обобщенному закону Релея и вероятность поражения РЛС находится как (см. Левин Б.Р. Теоретические основы радиотехники, т.1, М.: Сов. радио, 1966, С.121)

где Q(x, y) - интегральная обобщенная функция распределения Релея-Раиса (см. Барк Л.С. и др. Таблицы распределения Релея-Раиса, ВЦ АН СССР, 1964), Rn - радиус поражения боеприпаса, σ - среднеквадратическая ошибка определения местоположения РЛС, σн - среднеквадратическая ошибка наведения оружия, Г - ошибка определения местоположения РЛС определяемая как

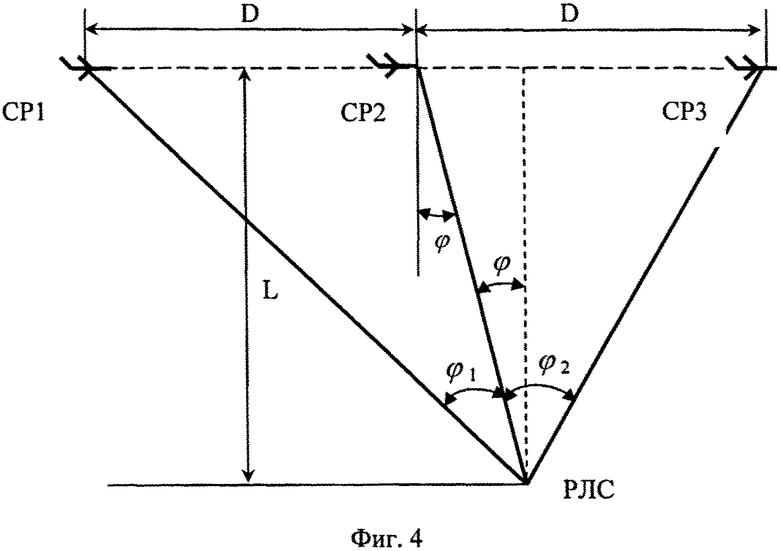
где φ1, φ2 - углы, под которыми соответствующие базы разностно-дальномерной системы видны из точки стояния РЛС (фиг.2).
Здесь L - удаление РЛС от маршрута CP (L≥100 км), D - величина базы между двумя CP, φ - угол между нормалью к маршруту пролетов CP и направлением на РЛС, проведенным через центральный CP (фиг.2).
φ=arctgD/L
Применительно к заявляемому устройству текущая ошибка определения местоположения РЛС составит величину

Оценку вероятности поражения применительно к прототипу проведем для условий, то есть когда РЛС находится на расстоянии от ЛСВ, равной 100 км (см. www.6478867.com/tip-gan.pdf) и удаление между CP равно 200 км, φ=0°. В этом случае, φ1=φ2=64°. Для обеспечения в прототипе рассогласования между передними фронтами принимаемых к анализу пар сигналов разностно-дальномерной системой разведки РУК типа ПЛСС не менее Δτ=0,25 мкс, ошибка определения местоположения РЛС как следует из формулы (14), составит Г≈80 м.
Радиус поражения боеприпаса зависит от типа боевой части, мощности заряда в тротиловом эквиваленте и может меняться в широких пределах от 20 до 100 м (см. Оценка эффективности огневого поражения ударами ракет огнем артиллерии. - СПб.: Галея Принт, 2006, с.160-162). Для определенности примем, что радиус поражения боеприпаса составляет 50 м.
Среднеквадратическая ошибка определения местоположения когерентно-импульсной РЛС σ=15 м (см. www.6478867.com/tip-gan.pdf), а точность наведения оружия радиолокационным методом составляет ~10 м (см. Афинов В.В. Развитие в США высокоточного оружия и перспективы создания разведывательно-ударных комплексов, Военная мысль, №4, 1983, с.66).
В этом случае аргументы функции Релея-Раиса равны: x=2,8 (Rn=50 м, σ=15 м, σн=10 м), 
Применительно к заявляемому устройству предположим, что минимальное время задержки второй управляемой линии задержки равно τyзл2min=Δτ=0,25 мкс. В этом случае, как и для прототипа, вероятность поражения составит 0,1.
Максимальное время задержки выбирается из условия τулз2max≤τлз1. Принимая во внимание, что τлз1=2-5 мкс, для определенности примем, что τyзл2max=Δτ=1 мкс. В этом случае ошибка определения местоположения РЛС составит Г≈315 м. Тогда аргументы функции Релея-Раиса (при тех же значениях радиуса поражения боеприпаса и среднеквадратических ошибок определения местоположения РЛС и наведения оружия) составят x=2,8, 
Для создания эффекта имитации движения РЛС со скоростью 5…10 м/с для принятых минимальной (80 м) и максимальной (315 м) ошибок определения местоположения РЛС период повторения импульсов пилообразного напряжения составит 47…23,5 с.
Таким образом, за счет периодического изменения во времени ошибки определения местоположения РЛС вероятность ее поражения становится близкой к нулю. Кроме того, периодически изменяемые во времени ошибки определения местоположения РЛС приводят к созданию эффекта имитации ее движения, что способствует исключению ее из числа объектов поражения РУК.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОГЕРЕНТНО-ИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2011 |
|
RU2454678C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ | 1997 |
|
RU2129286C1 |
| СТАНЦИЯ ПОМЕХ ЛИНИЯМ РАДИОСВЯЗИ | 2002 |
|
RU2233551C2 |
| СПОСОБ ЗАЩИТЫ РЛС ОТ ПРОТИВОРАДИОЛОКАЦИОННЫХ РАКЕТ | 1999 |
|
RU2153684C1 |
| Способ функционирования системы импульсно-доплеровских бортовых радиолокационных станций при групповых действиях истребителей | 2019 |
|
RU2728280C1 |
| СКАНИРУЮЩАЯ МНОГОЧАСТОТНАЯ АНТЕННАЯ РЕШЕТКА ДЛЯ ФОРМИРОВАНИЯ В ПРОСТРАНСТВЕ ПОСЛЕДОВАТЕЛЬНОСТИ СВЕРХШИРОКОПОЛОСНЫХ ИМПУЛЬСНЫХ СИГНАЛОВ С УПРАВЛЯЕМОЙ ЧАСТОТОЙ ПОВТОРЕНИЯ ИМПУЛЬСОВ | 2016 |
|
RU2634752C2 |
| МНОГОЧАСТОТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И ДВУХУРОВНЕВЫМ РАСПОЗНАВАНИЕМ ЦЕЛЕЙ | 2007 |
|
RU2358288C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ЦЕЛЕЙ НА ФОНЕ ПОМЕХ | 1998 |
|
RU2139552C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ ОТ САМОНАВОДЯЩЕГОСЯ ОРУЖИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2022 |
|
RU2794223C1 |
| Имитатор радиолокационных целей | 2021 |
|
RU2787576C1 |
Изобретение предназначено для индивидуальной защиты радиолокационных комплексов обнаружения воздушных целей и управления оружием класса «земля-воздух» в условиях применения противником разведывательно-ударных комплексов типа ПЛСС (Precision Location Strike System - PLSS) с разностно-дальномерной системой радиотехнической разведки и командной системой наведения управляемого оружия по данным разведки. Достигаемый технический результат - снижение вероятности поражения когерентно-импульсной радиолокационной станции (РЛС). Указанный результат достигается тем, что РЛС содержит задающий генератор, синхронизатор, импульсный модулятор, две линии задержки, три усилителя мощности, приемо-передающее антенное устройство, приемное устройство, два формирователя импульсов, два передающих антенных устройства, генератор пилообразного напряжения, определенным образом соединенные между собой. 4 ил.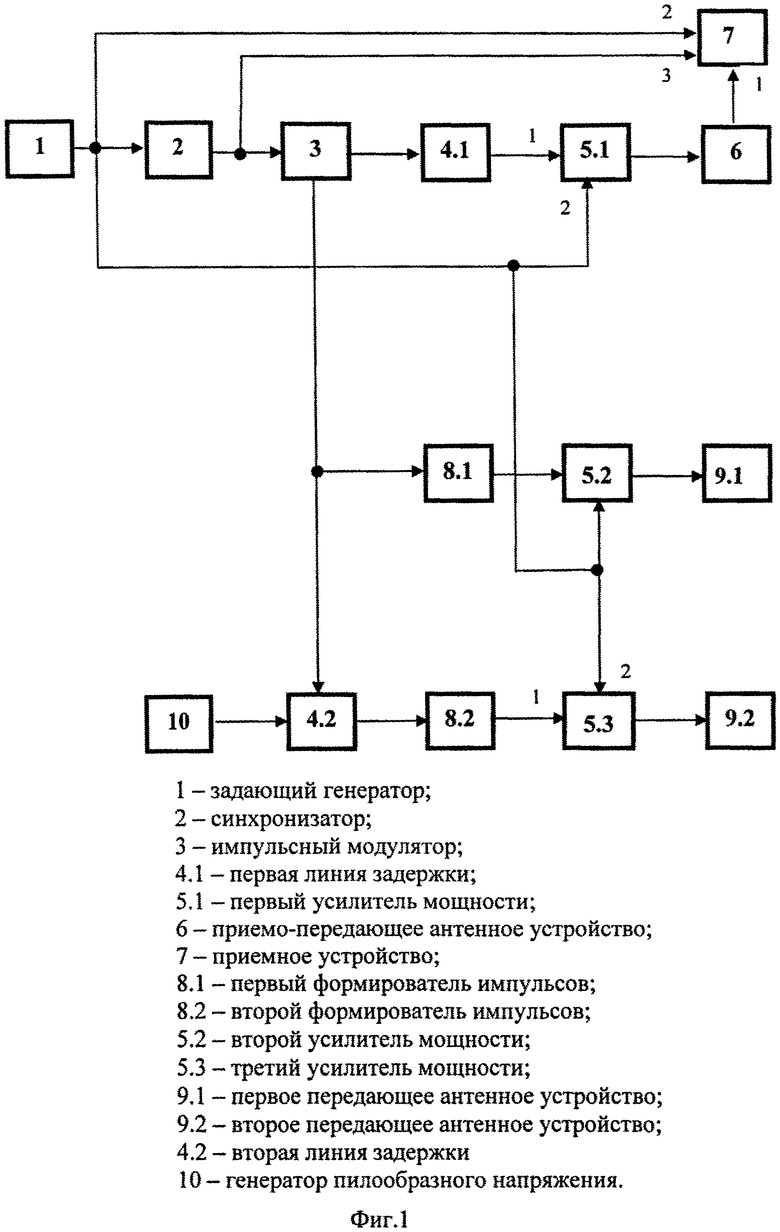
Когерентно-импульсная радиолокационная станция, содержащая последовательно соединенные задающий генератор, синхронизатор, импульсный модулятор, первую линию задержки, первый усилитель мощности, ко второму входу которого подключен выход задающего генератора, приемо-передающее антенное устройство и приемное устройство, второй вход которого подключен к выходу задающего генератора, а третий - к выходу синхронизатора, подключенные ко второму выходу импульсного модулятора последовательно соединенные первый формирователь импульсов, второй усилитель мощности, первое передающее антенное устройство и последовательно соединенные вторую линию задержки, к первому входу которой подключен выход импульсного модулятора, второй формирователь импульсов, третий усилитель мощности, ко второму входу которого подключен выход задающего генератора и второе передающее антенное устройство, а коэффициенты усиления по мощности второго и третьего усилителей мощности Ку удовлетворяют условию
где Ку1 - коэффициент усиления по мощности первого усилителя мощности, G1 - коэффициент усиления приемо-передающего антенного устройства, G - коэффициенты усиления первого и второго антенных устройств, отличающаяся тем, что в нее введен генератор пилообразного напряжения, подключенный ко второму входу второй линии задержки, которая выполнена управляемой, при этом время задержки первой линии задержки τлз1 и максимальное время задержки второй управляемой линии задержки τулз2max выбирают из условий
τлз1≤τд1-τо,
τулз2max≤τлз1,
где τд1, τо - длительности импульсов дополнительного и основного сигналов соответственно, а первый и второй формирователи импульсов выполнены в виде ждущих мультивибраторов.
| КОГЕРЕНТНО-ИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2011 |
|
RU2454678C1 |

