Изобретение относится к машиностроению, а именно к преобразователям равномерного вращения ведущего звена в прямолинейное поступательное шатуна и найдет применение в различных областях техники и, в частности в строительных, сельскохозяйственных и других машинах.
Известен кривошипно-ползунный механизм Эванса, включающий основание с прямолинейной направляющей, установленный на основании кривошип, установленный в направляющей ползун, шатун, длина которого равна удвоенной длине кривошипа и который шарнирно связан серединой с кривошипом, а одним концом - с ползуном. Механизм обеспечивает точную прямолинейную траекторию движения концевой точки другого конца шатуна (см. Справочник машиностроителя: в 6 т. Т.1; под ред. Н.С. Ачеркана, - М.: Машгиз, 1963, с. 478-479, фиг. 21д).
Недостатком этого механизма является то, что он обеспечивает точное прямолинейное движение только одной концевой точки шатуна, не позволяющей закреплять к ней различные рабочие органы, например строительные, сельскохозяйственные, челюсти подгребающего грейфера и другие, для придания им прямолинейно-поступательного движения.
Известен направляющий кривошипно-ползунный механизм Артоболевского со звеном, движущимся прямолинейно-поступательно, включающий основание с прямолинейной направляющей, установленный на основании кривошип, шатун, длина которого равна удвоенной длине кривошипа, шарнирно связанный серединой с кривошипом и являющийся одновременно звеном шарнирного параллелограмма, другое звено которого, связанное шарнирно с концом шатуна, несет в середине ползун, установленный в направляющей, параллельной горизонтальной оси X. При повороте кривошипа звено параллелограмма, параллельное звену, на котором установлен ползун, движется по оси Y прямолинейно-поступательно (Артоболевский И.И. Механизмы в современной технике. - М.: Наука, т.2, с. 479, рис. 1482).
Недостатками этого механизма являются громоздкая кинематическая связь кривошипа с прямолинейно-поступательным звеном, направляющая с ползуном установлена вне координатных осей, что увеличивает громоздкость, снижает компактность и ограничивает технические возможности связи с другими механизмами и системами машин и его применения.
Наиболее близким по технической сущности и достигаемому результату является кривошипно-ползунный механизм со звеном, движущимся прямолинейно-поступательно (SU №1605059 А1, МПК F16H 21/00, опубл. 07.11.90, Бюл. №41), содержащий основание, прямолинейную направляющую с ползуном, первый шатун, равный удвоенной длине кривошипа и шарнирно связанный серединой с ним и одним концом - с ползуном, а с другим концом одним концом шарнирно связан второй шатун, с другим концом которого связан одним концом третий шатун, кинематически связанный посредством шарнира с кривошипом.
Недостатком этого механизма является то, что механизм не обеспечивает точного прямолинейного движения поступательного звена, поступательное звено движется плоскопараллельно под определенным углом к направлению движения. Это ограничивает компактную связь с другими механизмами и системами машин.
Технический результат предлагаемого изобретения - обеспечение точного прямолинейного движения поступательного звена, повышение компактности механизма, компактности связи механизма с другими механизмами и системами и расширение технических возможностей его применения.
По отношению к прототипу, содержащему основание с прямолинейной направляющей, установленный в направляющей ползун, установленный на основании кривошип, первый шатун, равный удвоенной длине кривошипа и который шарнирно связан своей серединой с кривошипом и одним концом - с ползуном, а с другим концом шатуна одним концом шарнирно связан второй шатун, с другим концом которого шарнирно связан одним концом третий шатун, другой конец которого посредством шарнира кинематически связан с кривошипом, в заявленном изобретении имеются следующие отличительные признаки.
В предлагаемом кривошипно-ползунном механизме со звеном, движущимся прямолинейно-поступательно, механизм дополнен четвертым шатуном, а третий шатун равен длине кривошипа и связан другим концом шарнирно с одним концом расположенного горизонтально или под углом четвертого шатуна, который равен длине второго шатуна, связан другим концом шарнирно с кривошипом, несет горизонтально расположенную консоль и образует с третьим, вторым и половиной первого шатуна - параллелограмм, а на консоли четвертого шатуна установлен скользящий по консоли шарнир, связывающий два равных по длине звена, другие концы которых связаны шарнирами с кривошипом и первым шатуном так, что образуют с ними ромб.
В новой совокупности признаков возникает новое техническое свойство - возможность точного прямолинейно-поступательного движения звена, как в горизонтальном положении, так и под углом к горизонтальной оси.
Рассмотренные признаки являются достаточными для достижения заявляемого технического результата.
Предлагаемое изобретение решает задачу повышения компактности связи механизма с другими механизмами и системами машин и расширения технических возможностей его применения путем введения дополнительных звеньев, иного выполнения и соединения звеньев и изменения их кинематических связей.
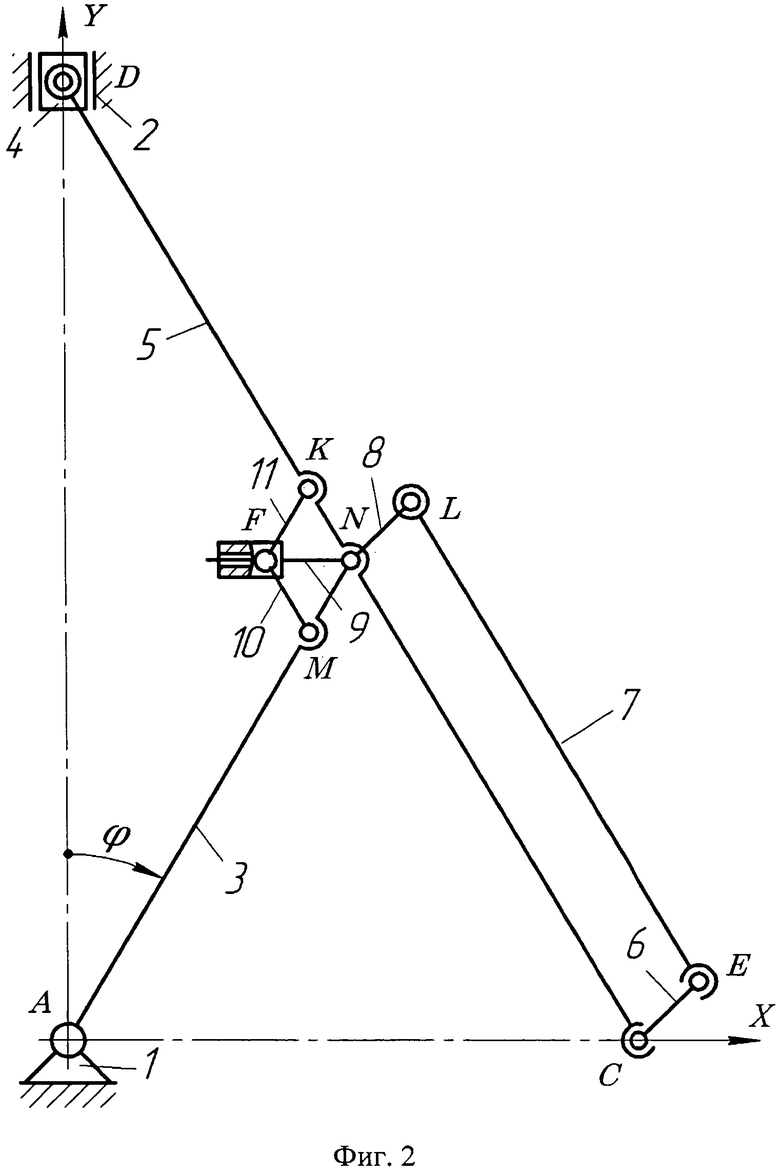
На фиг.1 показана кинематическая схема механизма в положении поступательного звена горизонтально по оси X; на фиг.2 - в положении поступательного звена под углом к оси X.
Механизм (фиг.1, 2) содержит основание 1 с прямолинейной направляющей 2, установленный на основании кривошип 3 с шарниром N, установленный в направляющей 2 ползун 4, первый шатун 5, равный удвоенной длине кривошипа 3 и который связан с ним своей серединой шарниром N, а одним концом шарниром D - с ползуном 4. С другим концом шатуна 5 одним концом шарниром С связан второй шатун 6, с другим концом которого шарниром Е связан одним концом третий шатун 7, который равен длине кривошипа 3 и связан другим концом шарниром L с одним концом расположенного горизонтально (фиг.1) или под углом (фиг.2) четвертого шатуна 8, который равен длине второго шатуна 6 и другим концом связан шарниром N с кривошипом 3. Четвертый шатун 8 несет горизонтально расположенную консоль 9 и образует с третьим, вторым и половиной первого шатуна - параллелограмм NCEL.
На консоли шатуна установлен скользящий по ней шарнир F, который связывает два равных по длине звена 10 и 11, другие концы которых связаны шарнирами М и К, соответственно, с кривошипом 3 и первым шатуном 5 так, что образуют с ними ромб KFMN.
Механизм работает следующим образом.
При повороте кривошипа 3 на угол φ от продольной оси направляющей 2 (оси Y) ползун 4 перемещается по направляющей 2, а шарнир С первого шатуна 5 (и второго шатуна 6) в силу равенства длины шатуна 5 удвоенной длине кривошипа 3 движется точно по оси X. Звенья 10 и 11 ромба KFMN перемещают шарнир F по горизонтальной консоли 9 четвертого шатуна 8 и удерживают четвертый шатун точно в горизонтальном положении (фиг. 1) или под заданным углом (фиг. 2), а вместе с ним будет иметь такое же положение и второй шатун 6, входящий в параллелограмм NCEL. Таким образом, второй шатун 6, как поступательное звено, будет двигаться точно прямолинейно-поступательно как в горизонтальном положении, так и под заданным углом к оси X, что расширяет технические возможности применения механизма.
Изобретение относится к преобразователям вращения ведущего звена в поступательное движение шатуна. Механизм содержит основание с кривошипом и направляющую с ползуном, первый шатун, равный двум длинам кривошипа и связанный с ним серединой, а одним концом - с ползуном. С другим концом шатуна связан второй шатун, с другим концом которого связан одним концом третий шатун, равный длине кривошипа и который связан другим концом с одним концом четвертого шатуна, равным длине второго шатуна и который другим концом связан с кривошипом, несет консоль и образует с третьим, вторым и половиной первого шатуна - параллелограмм. На консоли четвертого шатуна установлен скользящий по ней шарнир, с которым связаны два равных по длине звена, другие концы которых связаны с шарнирами, установленными на кривошипе и первом шатуне так, что образуют с ними ромб. Третий шатун равен длине кривошипа и связан другим концом с одним концом дополненного четвертого шатуна, равного длине второго шатуна и который другим концом связан с шарниром кривошипа, несет консоль и образует с ними параллелограмм. На консоли четвертого шатуна установлен скользящий по ней шарнир, который связывает два равных по длине звена, другие концы которых связаны шарнирами с кривошипом и первым шатуном так, что образуют с ними ромб. Достигается повышение компактности механизма. 2 ил.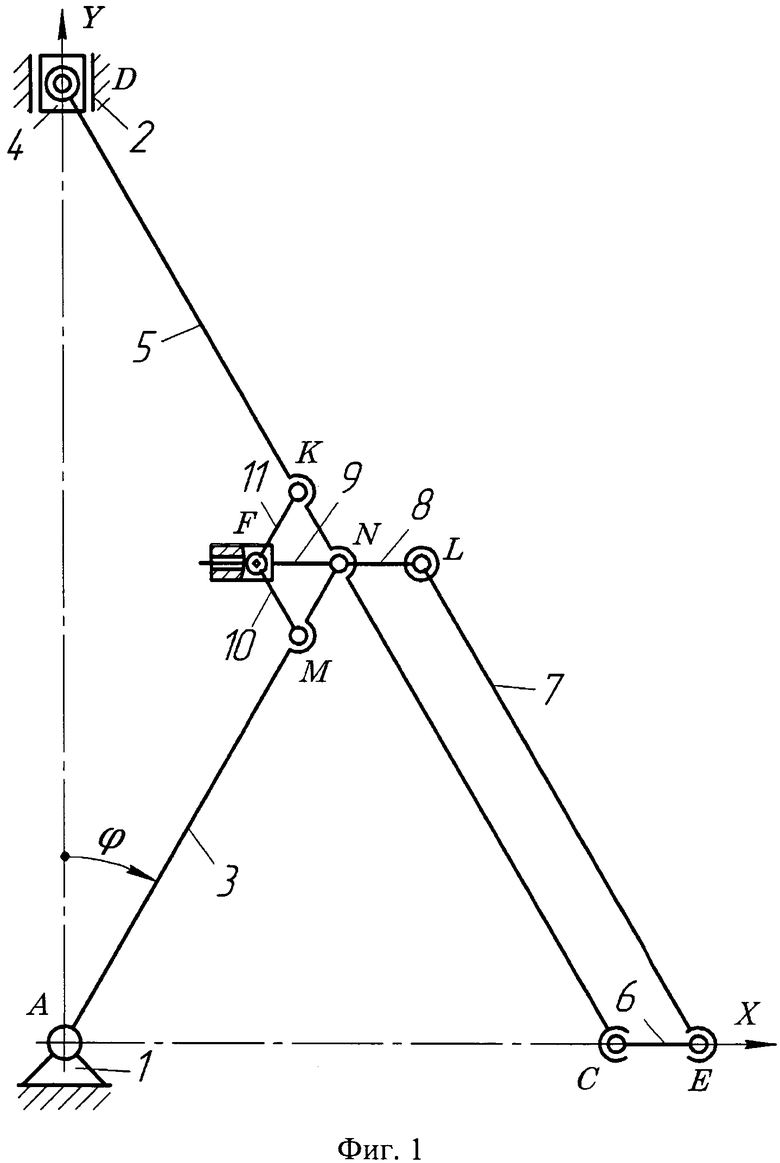
Кривошипно-ползунный механизм со звеном, движущимся прямолинейно-поступательно, содержащий основание с прямолинейной направляющей, установленный в направляющей ползун, установленный на основании кривошип, первый шатун, равный удвоенной длине кривошипа и который шарнирно связан своей серединой с кривошипом и одним концом - с ползуном, а с другим концом шатуна одним концом шарнирно связан второй шатун, с другим концом которого шарнирно связан одним концом третий шатун, другой конец которого посредством шарнира кинематически связан с кривошипом, отличающийся тем, что механизм дополнен четвертым шатуном, а третий шатун равен длине кривошипа и связан другим концом шарнирно с одним концом расположенного горизонтально или под углом четвертого шатуна, который равен длине второго шатуна, связан другим концом шарнирно с кривошипом, несет горизонтально расположенную консоль и образует с третьим, вторым и половиной первого шатуна - параллелограмм, а на консоли четвертого шатуна установлен скользящий по консоли шарнир, связывающий два равных по длине звена, другие концы которых связаны шарнирами с кривошипом и первым шатуном так, что образуют с ними ромб.
| Кривошипно-ползунный механизм с звеном, движущимся прямолинейно-поступательно | 1988 |
|
SU1605059A1 |

