Изобретение относится к машиностроению, а именно к кривошипно-ползунным прямолинейно-направляющим механизмам с постоянной длиной контура, описанного по концевым точкам составляющих его звеньев, и найдет применение в различных областях техники и, в частности, в рабочих органах строительных, сельскохозяйственных, мелиоративных и других машин с цепным приводом и переменной шириной захвата.
Известен симметричный кривошипно-ползунный механизм с постоянной длиной контура, содержащий основание с прямолинейной направляющей, два равных по длине кривошипа, связанных с основанием общим шарниром, размещенным на оси направляющей, размещенный в направляющей ползун и связанную с ним общим шарниром первую пару шатунов, равных по длине каждый двум длинам кривошипа, а серединами шарнирно связанных каждый с соответствующим кривошипом, вторую пару равных между собой по длине шатунов, одними концами связанных общим шарниром первой пары шатунов, два равных между собой по длине рычага, шарнирно связанных каждый одним концом с другим концом соответствующего шатуна второй пары, а другим - с кривошипом, расположенным по другую сторону от оси направляющей, два прямолинейных стержня одинаковой длины, жестко связанных с другими концами соответствующих шатунов второй пары, являющимися их продолжениями. [SU №1460478 А2, МПК F16H 21/00, - аналог].
Недостатком этого механизма является то, что его функциональные возможности определяются одним кинематическим свойством - постоянством длины контура по концевым точкам составляющих его звеньев, что ограничивает возможности его применения. Геометрические параметры звеньев механизма определяются методами параметрической оптимизации функции цели по критерию постоянства длины контура механизма. Так, в диапазоне конструктивно значимого угла поворота ϕ=60° ведущего звена - кривошипа от 15° до 75° относительно осей X и Y, изменение длины контура механизма-аналога составляет ±0,3%. Технологические параметры и функциональные возможности различных машин и устройств существенно расширяются при использовании в их конструкции механизмов с двумя и более кинематическими свойствами.
Наиболее близким по технической сущности и достигаемому техническому результату является симметричный кривошипно-ползунный механизм, содержащий основание с прямолинейной направляющей, два равных по длине кривошипа, связанных с основанием общим шарниром, размещенным на оси направляющей, размещенный в направляющей ползун и связанную с ним общим шарниром первую пару шатунов, равных по длине каждый двум длинам кривошипа, а серединами шарнирно связанных каждый с соответствующим кривошипом, вторую пару равных между собой по длине шатунов, одними концами связанных общим шарниром первой пары шатунов и ползуна, два равных между собой по длине рычага, шарнирно связанных каждый одним концом с соответствующим шатуном второй пары, а другим - с кривошипом, расположенным по другую сторону от оси направляющей, два симметричных равных между собой по длине шатуна третьей пары, связанных шарнирно каждый одним концом с другим концом соответствующего шатуна из первой пары, два симметричных равных каждый длине кривошипа шатуна четвертой пары, связанных шарнирно каждый одним концом с другим концом соответствующего шатуна из третьей пары, два симметричных равных между собой по длине шатуна пятой пары, связанных шарнирно каждый одним концом с другим концом соответствующего шатуна из четвертой пары, другим концом жестко связанных каждый со своим шарниром, размещенным в общем шарнире связи соответствующего кривошипа с серединой шатуна из первой пары, два симметричных вертикальных равных между собой по длине консольных стержня, жестко связанных каждый с соответствующим шарниром другого конца шатуна из пятой пары, две пары симметричных равных между собой по длине звеньев, связанных одними концами каждая пара между собой шарнирами, через которые проходят консольные стержни и скользят в них, а другими концами связаны шарнирами с соответствующими кривошипами и первыми шатунами так, что образуют с ними два симметричных ромба [патент №2568159 по заявке 2014108378, МПК F16H 21/00, - прототип].
Механизм имеет более широкие функциональные возможности, так как в его конструкции сочетаются два кинематических свойства. Он является механизмом с постоянной длиной контура и механизмом со звеном, движущимся прямолинейно поступательно.
Недостатком этого механизма является то, что, как и у аналога, изменение длины контура механизма по концевым точкам составляющих его звеньев в конструктивно значимом рабочем диапазоне угла поворота кривошипа в 60° от 15° до 75° относительно осей X и Y составляет также ±0,3%, так как звено, движущееся прямолинейно поступательно, не выступает за пределы контура механизма, его длина не является слагаемым в длине контура механизма, и поэтому длина этого звена не учитывается в функции цели, отражающей свойство постоянства длины контура. Это не позволяет обеспечить рабочий диапазон угла поворота кривошипа с меньшим изменением длины контура механизма.
Технический результат предлагаемого изобретения - рабочий диапазон угла поворота кривошипа с меньшим изменением длины контура механизма.
Заявляемое изобретение направлено на решение технической задачи - рабочий диапазон угла поворота кривошипа с меньшим изменением длины контура механизма путем включения звена, движущегося прямолинейно-поступательно, в состав длины контура механизма по концевым точкам его звеньев с сочетанием в одном механизме двух кинематических свойств.
Техническая задача решается тем, что в симметричном кривошипно-ползунном механизме, содержащем основание с прямолинейной направляющей, два равных по длине кривошипа, связанных с основанием общим шарниром, размещенным на оси направляющей, размещенный в направляющей ползун и связанную с ним общим шарниром первую пару шатунов, равных по длине каждый двум длинам кривошипа, а серединами шарнирно связанных каждый с соответствующим кривошипом, вторую пару равных между собой по длине шатунов, одними концами связанных общим шарниром первой пары шатунов и ползуна, два равных между собой по длине рычага, шарнирно связанных каждый одним концом с соответствующим шатуном второй пары, а другим - с кривошипом, расположенным по другую сторону от оси направляющей, два симметричных равных между собой по длине шатуна третьей пары, связанных шарнирно каждый одним концом с другим концом соответствующего шатуна из первой пары, два симметричных равных каждый длине кривошипа шатуна четвертой пары, связанных шарнирно каждый одним концом с другим концом соответствующего шатуна из третьей пары, два симметричных равных между собой по длине шатуна пятой пары, связанных шарнирно каждый одним концом с другим концом соответствующего шатуна из четвертой пары, другим концом жестко связанных каждый со своим шарниром, размещенным в общем шарнире связи соответствующего кривошипа с серединой шатуна из первой пары, два симметричных вертикальных равных между собой по длине консольных стержня, жестко связанных каждый с соответствующим шарниром другого конца шатуна из пятой пары, две пары симметричных равных между собой по длине звеньев, связанных одними концами каждая пара между собой шарнирами, через которые проходят консольные стержни и скользят в них, а другими концами связаны шарнирами с соответствующими кривошипами и первыми шатунами так, что образуют с ними два симметричных ромба, согласно изобретению соответствующие шатуны из третьей, четвертой и пятой пары с половинами шатунов из первой пары образуют параллелограммы, причем шатуны третьей пары образуют звенья с прямолинейно-поступательным движением по горизонтальной оси, которые выступают за пределы концевых точек первых шатунов, и их длина входит слагаемым в длине контура механизма, образованного концевыми точками составляющих его звеньев.
Сущность изобретения заключается в том, что в механизме с постоянной длиной контура соответствующие шатуны из третьей, четвертой и пятой пары с половинами шатунов из первой пары образуют параллелограммы, при этом шатуны третьей пары образуют звенья механизма с прямолинейно-поступательным движением по горизонтальной оси, выступают за пределы концевых точек первых шатунов механизма и их длина входит слагаемым в длине контура механизма, образованного концевыми точками составляющих его звеньев. Третьи шатуны, как поступательные звенья, включенные в состав контура механизма, образованного концевыми точками составляющих его звеньев, увеличивают в функции цели число параметров синтеза до пяти, что позволяет снизить до 0,1%, в сравнении с прототипом, изменение длины контура механизма по концевым точкам составляющих его звеньев в конструктивно значимом рабочем диапазоне угла поворота кривошипа в 60° от 15° до 75° относительно осей X и Y.
В новой совокупности признаков возникает новое техническое свойство механизма с постоянной длиной контура - рабочий диапазон угла поворота кривошипа с меньшим изменением длины контура механизма.
Рассмотренные признаки являются достаточными для достижения заявляемого технического результата.
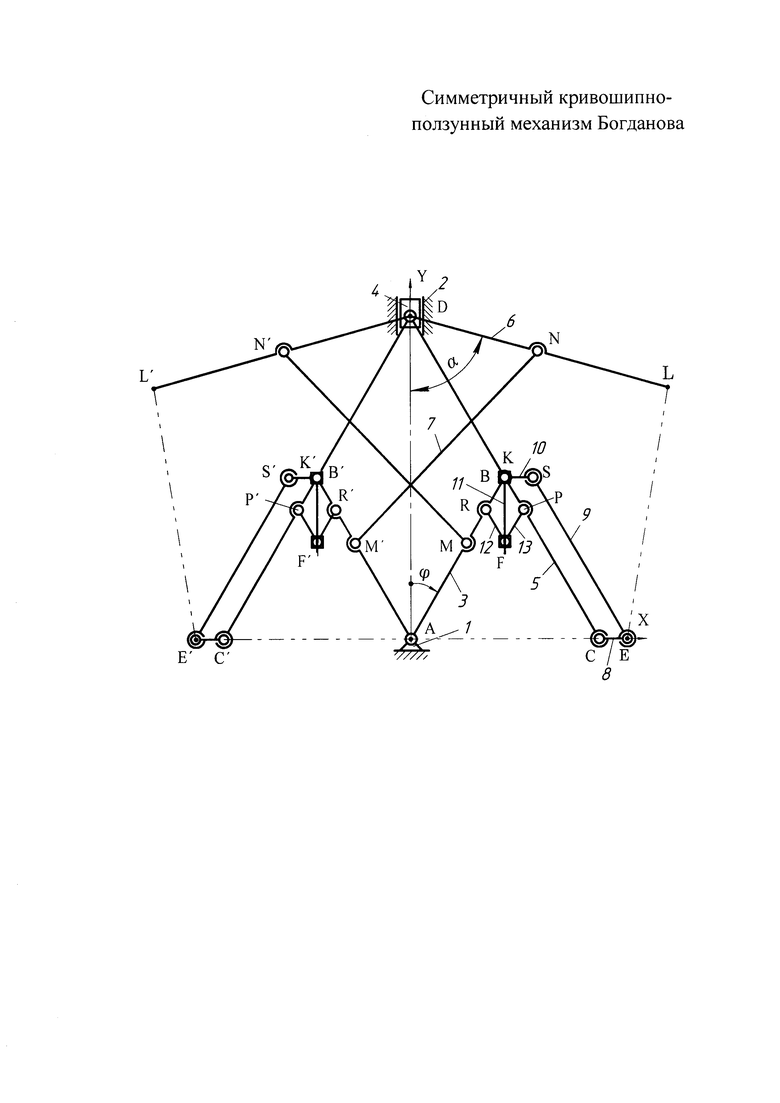
Заявляемое изобретение поясняется чертежом, на котором представлена кинематическая схема механизма с постоянной длиной контура и со звеном, движущимся прямолинейно-поступательно.
Механизм содержит основание 1 с прямолинейной направляющей 2, установленные на основании 1 два кривошипа 3 равной длины, общий шарнир А которых размещен на продольной вертикальной оси направляющей 2, в которой установлен ползун 4. Общим шарниром D с ползуном 4 связана одними концами первая пара шатунов 5, длина каждого из которых равна двум длинам кривошипа 3, и вторая пара шатунов 6, по длине равных друг другу. Шатуны 5 из первой пары своими серединами шарнирами В и В' связаны каждый с соответствующим кривошипом 3, а шатуны 6 из второй пары шарнирами N и N' связаны каждый с соответствующим рычагом 7, которые, в свою очередь, шарнирами М и М' другими концами связаны каждый с соответствующим кривошипом 3. С другим концом первого шатуна 5 одним концом шарниром С связан третий шатун 8, с другим концом которого шарниром Е связан одним концом четвертый шатун 9, который равен длине кривошипа 3 и связан другим концом шарниром S с одним концом расположенного горизонтально пятого шатуна 10, который равен длине третьего шатуна 8, и другим концом жестко связан со своим шарниром K, размещенным в шарнире В связи соответствующего кривошипа 3 с серединой шатуна 5 из первой пары. Соответствующие шатуны из третьей 8, четвертой 9, пятой 10 пары и половины шатунов 5 из первой пары образуют параллелограмм KSEC.
С шарнирами K пятых шатунов 10 жестко связаны вертикальные консольные стержни 11, по которым скользят шарниры F и F', связывающие одинаковой длины звенья 12, 13, другие концы которых связаны шарнирами R и Р, соответственно, с кривошипом 3 и первым шатуном 5 так, что образуют с ними ромб FRBP.
Механизм работает следующим образом.
При повороте кривошипов 3 на угол ϕ от оси симметрии шатуны 5 и 6 совершают сложное движение. При этом концы шатунов 5 и 6, связанные шарниром D, вместе с ползуном 4 совершают прямолинейное однонаправленное движение по оси симметрии Y, а концы С и С' первых шатунов 5 и концы Е и Е' третьих шатунов 8 совершают прямолинейное разнонаправленное движение по оси X.
Из чертежа следует, что длина контура механизма по точкам ACELDL'Е'С'А постоянна, если в процессе поворота кривошипа 3 на угол ϕ сумма перемещения Хе точки Е шатуна 8 по оси X, расстояние EL между концевыми точками шатунов 8 и 6 и длина DL второго шатуна 6 постоянны. Это условие в предлагаемом механизме выражается функцией цели:

где Хс - абсцисса концевой точки С шатуна 5;
СЕ - длина третьего шатуна 8;
 - абсцисса концевой точки L второго шатуна 6;
- абсцисса концевой точки L второго шатуна 6;
 - ордината концевой точки L второго шатуна 6;
- ордината концевой точки L второго шатуна 6;
DL - длина второго шатуна 6.
После введения обозначений параметров и математических преобразований это выражение можно представить в виде

где ϕ - угол поворота кривошипов 3;
α - угол между вторым шатуном 6 и осью Y;
b=DL - длина второго шатуна 6;
f=СЕ - длина третьего шатуна 8.
Угол α геометрически связан с звеньями механизма и углом ϕ следующим выражением:
где m1 - положение шарнира М на кривошипе 3, равное расстоянию от шарнира А до шарнира М;
m2 - положение шарнира N на шатуне 6, равное расстоянию от шарнира D до шарнира N;
с - длина рычага 7.
В функции цели, определяющей свойство механизма, пять параметров b, f, с, m1, m2 являются параметрами синтеза, которые определяются методами параметрической оптимизации функции цели по критерию постоянства длины контура механизма. В диапазоне конструктивно значимого угла поворота ϕ=60° ведущего звена - кривошипа 3 от 15° до 75° изменение длины контура механизма ACELDL'E'C'A не превышает 0,1% при конструктивно принимаемой относительной длине звена, движущегося прямолинейно-поступательно - третьего шатуна 8, равной 0,25 длины кривошипа 3.
Далее, при повороте кривошипа 3 на угол ϕ от продольной вертикальной оси направляющей 2 (оси Y) ползун 4 перемещается по направляющей 2, а шарнир С первого шатуна 5 в силу равенства длины шатуна 5 удвоенной длине кривошипа 3 и третий шатун 8 как поступательное звено, входящее в параллелограмм KSEC, движутся точно по оси X. Звенья 12 и 13 ромба FRBP перемещают шарнир F по консольному стержню 11, жестко связанному с шарниром K пятого шатуна 10, и удерживают стержень 11 в вертикальном положении, а шатун 10 точно в горизонтальном положении или под заданным углом. Вместе с пятым шатуном 10 будет иметь такое же положение и третий шатун 8, входящий в параллелограмм KSEC.
Технологические параметры и функциональные возможности различных машин и устройств существенно расширяются при выполнении, например, их остова (рамы) в виде регулируемых переменной конфигурации конструкций, представляющих механизм с двумя кинематическими свойствами - с постоянной длиной контура и с поступательными звеньями. Такой механизм найдет применение, например, в рабочих органах машин с цепным приводом и переменной шириной захвата, а поступательные звенья этого же механизма с встречно направленным движением позволят, например, закреплять к ним различные другие рабочие органы, подвижные концевые опоры для придания устойчивости устройствам, копиры для контроля ширины захвата и направляющие элементы таких устройств.
Изобретение относится к области машиностроения, а более конкретно к кривошипно-ползунным механизмам. Симметричный кривошипно-ползунный механизм содержит основание, направляющую с ползуном, два кривошипа, два рычага и пять пар шатунов. Механизм несет два вертикальных консольных стержня, жестко связанных каждый с шарниром шатуна из пятой пары, а также две пары равной длины звеньев, связанных одними концами шарнирами, через которые проходят стержни и скользят в них, а другими концами связанных шарнирами с соответствующими кривошипами и шатунами первой пары. Достигается расширение функциональных возможностей. 1 ил.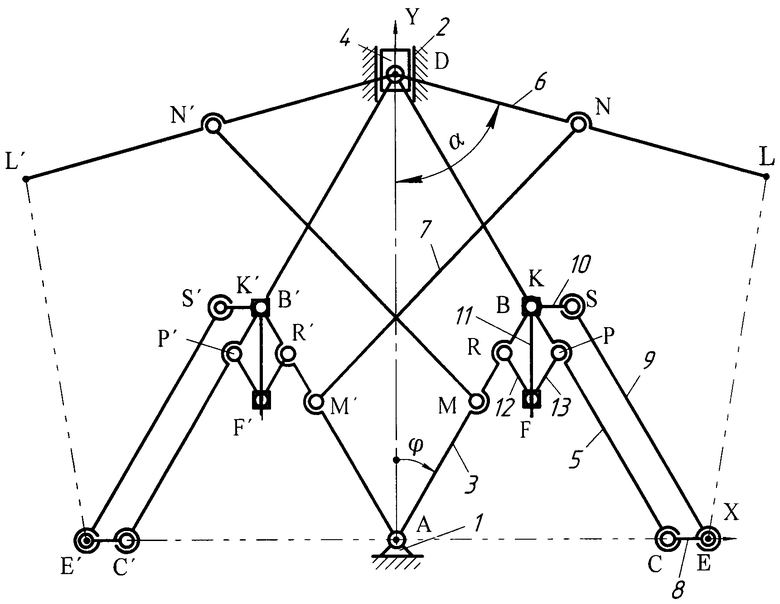
Симметричный кривошипно-ползунный механизм, содержащий основание с прямолинейной направляющей, два равных по длине кривошипа, связанных с основанием общим шарниром, размещенным на оси направляющей, размещенный в направляющей ползун и связанную с ним общим шарниром первую пару шатунов, равных по длине каждый двум длинам кривошипа, а серединами шарнирно связанных каждый с соответствующим кривошипом, вторую пару равных между собой по длине шатунов, одними концами связанных общим шарниром первой пары шатунов и ползуна, два равных между собой по длине рычага, шарнирно связанных каждый одним концом с соответствующим шатуном второй пары, а другим - с кривошипом, расположенным по другую сторону от оси направляющей, два симметричных равных между собой по длине шатуна третьей пары, связанных шарнирно каждый одним концом с другим концом соответствующего шатуна из первой пары, два симметричных равных каждый длине кривошипа шатуна четвертой пары, связанных шарнирно каждый одним концом с другим концом соответствующего шатуна из третьей пары, два симметричных равных между собой по длине шатуна пятой пары, связанных шарнирно каждый одним концом с другим концом соответствующего шатуна из четвертой пары, другим концом жестко связанных каждый со своим шарниром, размещенным в общем шарнире связи соответствующего кривошипа с серединой шатуна из первой пары, два симметричных вертикальных равных между собой по длине консольных стержня, жестко связанных каждый с соответствующим шарниром другого конца шатуна из пятой пары, две пары симметричных равных между собой по длине звеньев, связанных одними концами каждая пара между собой шарнирами, через которые проходят консольные стержни и скользят в них, а другими концами связанных шарнирами с соответствующими кривошипами и первыми шатунами так, что образуют с ними два симметричных ромба, отличающийся тем, что соответствующие шатуны из третьей, четвертой и пятой пары с половинами шатунов из первой пары образуют параллелограммы, причем шатуны третьей пары образуют звенья с прямолинейно-поступательным движением по горизонтальной оси, которые выступают за пределы концевых точек первых шатунов, и их длина входит слагаемым в длине контура механизма, образованного концевыми точками составляющих его звеньев.
| RU 2014108378 A, 10.09.2015 | |||
| US 20120180752 A1, 19.07.2012 | |||
| WO 2009006682 A1, 15.01.2009 | |||
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ БОГДАНОВА СО ЗВЕНОМ, ДВИЖУЩИМСЯ ПРЯМОЛИНЕЙНО-ПОСТУПАТЕЛЬНО | 2013 |
|
RU2553613C1 |

