Изобретение относится к машиностроению, а именно к шарнирно-рычаж- ным прямолинейно направляющим механизмам, и может найти применение, в частности, в различных устройствах, где требуется перемещение одновременно нескольких объектов по общей прямолинейной траектории.
Цель изобретения - расширение кинематических возможностей механизма за счет увеличения количества точек его звеньев, совершающих прямолинейные перемещения.
На чертеже показана кинематическа схема механизма.
Механизм содержит основание 1, установленные на нем кривошипы 2 и
3и шарнирно связанный с ними шатун 4. Длина кривошипа 2 равна удвоенной длине кривошипа 3, а шатун 4 связан с серединой кривошипа 2, так что основание 1, кривошипы 2 и 3 и щатун
4образуют шарнирно-рычажный параллелограмм АВСО, На шатуне 4 последовательно установлены (один, три, или пять и т.д.) ползуны 5-7. Соответственно количеству ползунов механизм имеет прямолинейные стержни 8- (10, длина которых равна длине кривошипа 2 и которые шарнирно связаны серединами С; соответствующими ползунами 5-7, концами - последовательно связаны со свободным концом кривошипа 2 и друг с другом. Один конец .последнего стержня (на чертеже - .стержня 10) не связан с другими
звеньями механизма.
Механизм работает следующим образом. ,
: При вращении,от привода (не показан) кривошипа 2 -или 3 шатун 4 совершает круговое плоскопараллельное движение. При этом угол oi между
стержнями 8-10 и прямой ОА, соединяющей оси вращения кривошипов 2 и 3, . изменяется от О до 360 , а ползуны 5-7 соответственно перемещаются по шатуну 4. Точки D и Е механизма всегда лежат на прямой, параллельной шатуну 4 и совершающей подобно ему круговое плоскопараллельное движение, а точки F и К всегда перемещаются вдоль прямой ОА. При значениях с/, 90 и 270 точки D, Е, К и F располагаются на прямой СУ, а при значениях oi О и 180 - на прямой ОХ. Из последнего условия следует, что длина шатуна 4 и, следовательно, расстояния ОА между осями вращения кривошипов 2 и 3 должна быть не менее суммы длин кривошича 2 и всех прямолинейных стержней..
Формула
обретен и я
Прямолинейно направляющий механизм, содержащий основание и обра- с ним шарнирно-рычажный параллелограмм два кривошипа и шатун, отличающийся тем, что.
с целью рас дирения кинематических возможностей, первый кривошип по длине равен удвоенной длине второго кривошипа и связан с шатуном своей серединой, а механизм снаблсен ползунами, последовательно установленными Н-а шатуне в количестве, определяемом
любым нечетным числом, и прямолинейными стержнями по числу ползунов, длина которых равна длине первого кривошипа и которые шарнирно связа-U ны серединами с соответствуюш51ми ползунами, а концами - последовательно со свободным концом первого кривошипа и друг с другом, при этом один конец последнего стержня свободен от связи с другими звеньями.
Изобретение относится к шарнирно-рычажным направляющим механизмам и может найти применение в устройствах, где требуется перемещение одновременно нескольких объектов по общей прямолинейной траектории. Цель изобретения - расширение кинематических возможностей механизма за счет увеличения количества точек его звеньев, совершающих прямолинейные перемещения. При вращении кривошипов 2 и 3 шатун совершает круговое плоскопараллельное движение. При этом ползуны 5 - 7 перемещаются вдоль шатуна 4, точки Д и Е всегда лежат на прямой, параллельной шатуну 4 и совершающей, подобно ему, круговое плоскопараллельное движение, а точки К и F совершают движение вдоль прямой ОА. Количество ползунов 5 - 7 и соответственно стержней 8 - 10 может быть один, три, пять и т.д. 1 ил.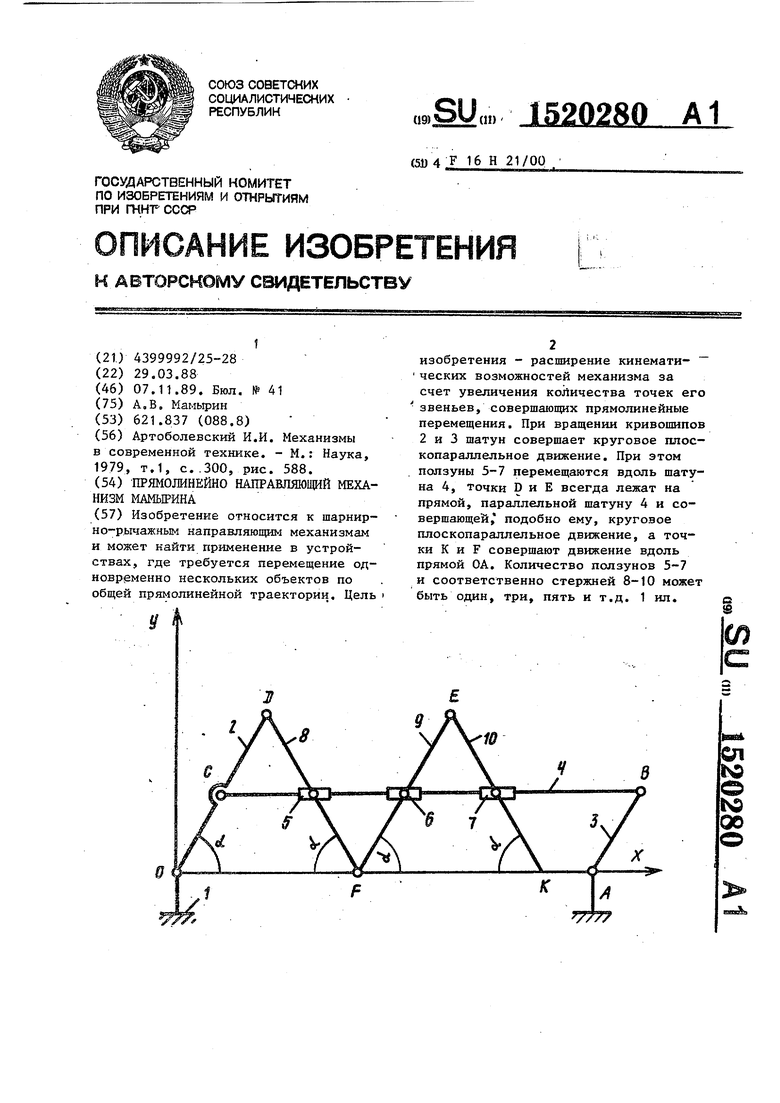
| Артоболевский И.И | |||
| Механизмы в современной технике | |||
| - М.: Наука, 1979, т,1, с..300, рис | |||
| Искроудержатель для паровозов | 1920 |
|
SU588A1 |
