Фие. Т
Изобретение относится к машиностроению, а именно к преобразователям равномерного вращения в прямолинейное возвратно-поступательное движение, и найдет применение, в частности, в сельскохозяйст- венных и мелиоративных машинах.
Цель изобретения - уменьшение габаритов механизма путем изменения кинематических связей его звеньев.
На фиг. 1 и 2 показаны варианты кинематических схем предлагаемого механизма.
Механизм содержит основание 1 с прямолинейной направляющей 2, установленный на основании кривощип 3, установленный в направляющей 2 ползун 4, первый щатун 5, длина которого равна удвоенной длине кри- вощипа 3 и который шарнирно связан своей серединой с кривошипом 3, а одним концом - с ползуном 4. С другим концом шатуна 5 одним концом щарнирно связан второй шатун 6, с другим концом которого щарнирно связан одним концом третий шатун 7. Другой конец шатуна 7 через шарнир 8 кинематически связан с кривошипом 3, при этом ось F шарнира 8 установлена эксцентрично продольной оси кривошипа 3 и может быть расположена как по одну (фиг. 1), так и по другую (фиг. 2) сторону от продольной оси первого шатуна 5. Ось А вращения кривошипа 3 пересечена с продольной осью направляющей 2.
Механиз.м работает следующим образом. При повороте кривошипа 2 на угол ф от продольной оси направляющей 2 (оси Y) ползун 4 перемещается по направляющей 2, а шарнир С первого щатуна 5 в силу равенства длины щатуна 5 удвоенной длине кривошипа 3 движется по оси АХ, перпен- дикулярной оси AY. При этом шарнирный четырехзвенник BCEF обеспечивает поступательное движение шатуна 6, т. е. постоянство направления его продольной оси, например, под углом а к оси АХ.
Так как в предлагаемом механизме точка С всегда движется вдоль оси АХ, то из схемы механизма очевидно, что поступательное движение шатуна 6 обеспечено постоянством длины отрезка EF (длины шатуна 7) и постоянством угла а при повороте кри- вошипа 3 на угол ф.
Это условие поступательного (плоскопараллельного) движения шатуна 6 выражается функцией цели
((, f const,
где Xf-.абсцисса точки Ё шатуна 6; - ордината точки Е шатуна 6;
0
0
5
5 5
0 5 .
5
0
Xf- абсцисса точки F шатуна 7; Yf - ордината точки F шатуна 7. Координаты точек Е и F определяются выражениями
(f-Icosa;
5f /sma,
(f-rs/n(cp+P);
Y COSCp-ГС05(ф+ p)
где / - относительная длина шатуна 6; г - относительное расстояние между осями шарниров S и f;
а - угол между продольной осью шатуна 6 и осью АХ;
Р - угол между продольной осью кривошипа 3 и прямой BE; ф - угол поворота кривошипа 3. В варианте механизма по фиг. 2 координаты точек Е и Е определяются выражениями
.5тф+/со5а,
Yf lsina.,
(- -rcos(,
+ ГСО5(ф + Р) .
Остальные расчеты аналогичны. Механизм обесг1ечивает поступательное (плоскопараллельное) перемещение шатуна 6 при повороте кривошипа 3 на угол ф -в пределах 10-75°.
Формула изобретения
Кривошипно-ползунный механизм с звеном, движущимся прямолинейно-поступательно, содержаший основание с прямолинейной направляющей, установленный в направляющей ползун, установленный на основании кривошип, первый шатун, длина которого рзвна удвоенной длине кривошипа и который шарнирно связан своей серединой с кривошипом, а одним концом - с ползуном, второй шатун, одним концом шарнирно связанный с другим концом первого шатуна, и третий шатун, одним концом шарнирно связанный с другим концом второго шатуна, а вторым концом кинематически связанный с кривошипом, отличающийся тем, что, с целью уменьшения габаритов, ось вращения кривошипа пересечена с продольной осью направляю-, щей, а кинематическая связь второго конца третьего шатуна с кривошипом выполнена в виде шарнира, установленного на кривошипе в плоскости его вращения эксцентрично его продольной оси по одну или по другую сторону от продольной оси первого шатуна.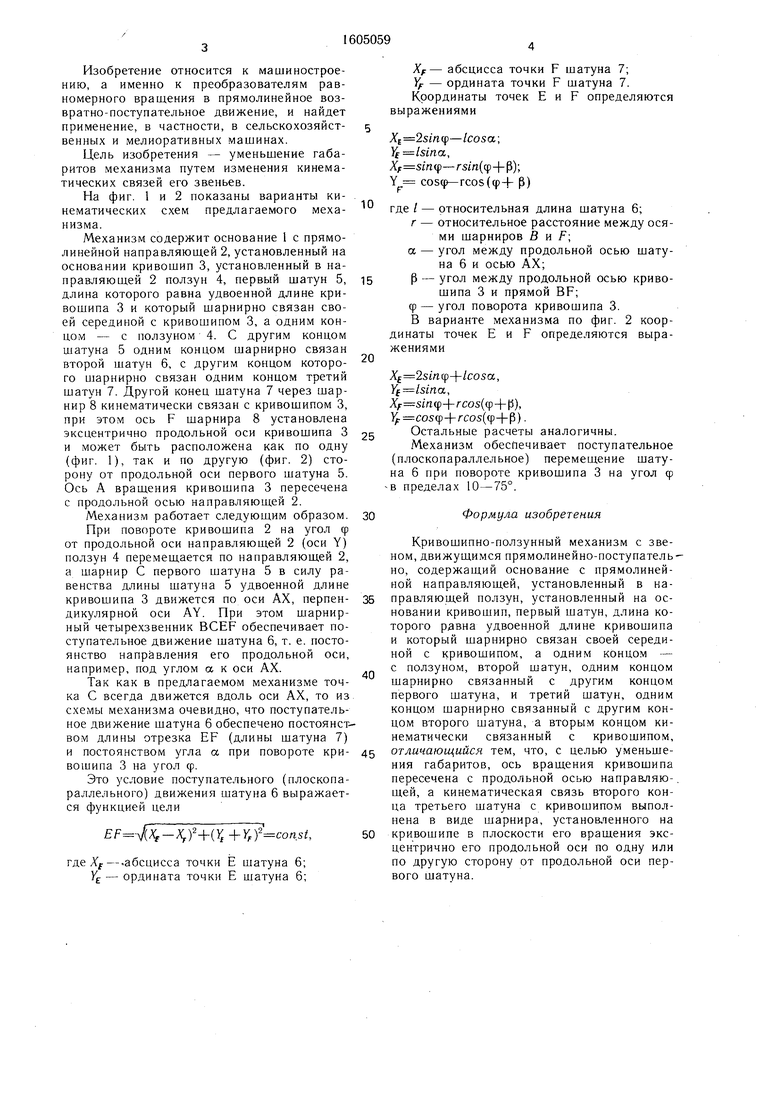
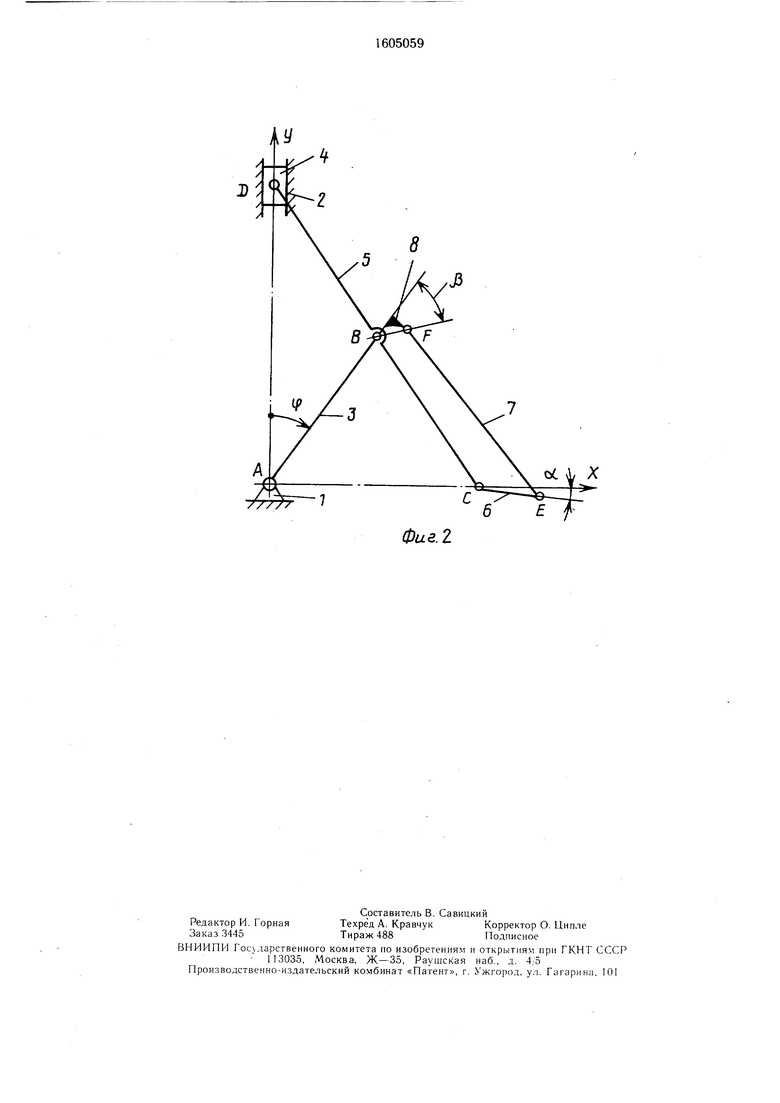
Изобретение относится к преобразователям равномерного вращения в прямолинейное возвратно-поступательное и может быть использовано, в частности, в сельскохозяйственных и мелиоративных машинах. Цель изобретения - уменьшение габаритов механизма путем изменения кинематических связей его звеньев. При вращении кривошипа 3 ползун 4 и шарнир С перемещаются по взаимно перпендикулярным прямым АУ и АХ. Шарнирный четырехзвенник BCEF при повороте кривошипа 3 на угол φ от прямой АУ в пределах 10...55° обеспечивает поступательное (плоскопараллельное) движение шатуна 6. 2 ил.
Фие.г
| Артоболевский И | |||
| И | |||
| Механизмы в современной технике | |||
| - М.: Наука, 1979, т | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Запор для дверей крытых товарных вагонов | 1923 |
|
SU479A1 |
| Устройство для ослабления пульсации выпрямленного тока | 1924 |
|
SU1482A1 |
