Изобретение относится к машиностроению, а именно к преобразователям равномерного вращения ведущего звена в прямолинейное поступательное движение шатуна, и найдет применение в различных областях техники и, в частности, в строительных, сельскохозяйственных и других машинах.
Известен направляющий кривошипно-ползунный механизм Артоболевского со звеном, движущимся прямолинейно-поступательно, включающий основание с прямолинейной направляющей, установленный на основании кривошип, шатун, длина которого равна удвоенной длине кривошипа, шарнирно связанный серединой с кривошипом и являющийся одновременно звеном шарнирного параллелограмма, другое звено которого, связанное шарнирно с концом шатуна, несет в середине ползун, установленный в направляющей, параллельной горизонтальной оси X. При повороте кривошипа звено параллелограмма, параллельное звену, на котором установлен ползун, движется по оси Y прямолинейно-поступательно [Артоболевский И.И. Механизмы в современной технике. - М.: Наука, т. 2, с. 479, рис. 1482].
Недостатками этого механизма являются громоздкая кинематическая связь кривошипа с прямолинейно-поступательным звеном, направляющая с ползуном установлена вне координатных осей, что увеличивает громоздкость, снижает компактность и ограничивает технические возможности связи с другими механизмами и системами машин и его применения.
Наиболее близким по технической сущности и достигаемому техническому результату является кривошипно-ползунный механизм со звеном, движущимся прямолинейно-поступательно, содержащий основание с прямолинейной направляющей, установленный в направляющей ползун, установленный на основании кривошип, первый шатун, равный удвоенной длине кривошипа и шарнирно связанный своей серединой с кривошипом, а одним концом - с ползуном, с другим концом шатуна одним концом шарнирно связан второй шатун, с другим концом которого связан одним концом третий шатун, равный длине кривошипа и связанный другим концом шарнирно с одним концом расположенного горизонтально или под углом четвертого шатуна, равным длине второго шатуна и который другим концом связан шарнирно с кривошипом, несет горизонтальную консоль и образует с третьим, вторым и половиной первого шатуна параллелограмм, а на консоли четвертого шатуна установлен скользящий по ней шарнир, с которым связаны два равных по длине звена, другие концы которых связаны с шарнирами, установленными на кривошипе и первом шатуне так, что образуют с ними ромб [патент №2568160 по заявке 2013158195, МПК F16H 21/00, - прототип].
Недостатком механизма является громоздкость механизма по вертикали, что ограничивает технические возможности его применения и компактную связь с другими механизмами и системами машин.
Технический результат предлагаемого изобретения - расширение технических возможностей применения механизма, повышение его компактности, повышение компактности связи механизма с другими механизмами и системами машин.
Заявляемое изобретение направлено на решение технической задачи - расширение технических возможностей применения механизма, повышение его компактности, повышение компактности связи механизма с другими механизмами и системами путем введения дополнительных звеньев, иного выполнения и соединения звеньев и изменения их кинематических связей.
Техническая задача решается тем, что кривошипно-ползунный механизм со звеном, движущимся прямолинейно-поступательно, содержащий основание с прямолинейной направляющей, установленный в направляющей ползун, установленный на основании кривошип, первый шатун, который шарнирно связан с кривошипом, а с другим концом шатуна одним концом шарнирно связан второй шатун, с другим концом которого шарнирно связан одним концом третий шатун, который равен длине кривошипа и связан другим концом шарнирно с одним концом расположенного горизонтально или под углом четвертого шатуна, равным длине второго шатуна, и который другим концом связан с шарниром, размещенным в шарнирном соединении кривошипа с первым шатуном, и образует с третьим, вторым и первым шатунами параллелограмм; в котором механизм дополнительно снабжен пятым и шестым шатунами, длина первого шатуна равна одной длине кривошипа и одним концом первый шатун шарнирно связан с кривошипом, который дополнительно снабжен промежуточным шарниром, с которым связан одним концом пятый шатун, равный длине участка кривошипа от основания до его промежуточного шарнира, а своим другим концом пятый шатун шарнирно связан с ползуном и снабжен консолью, жестко связанной с ним, с которой шарнирно связан одним концом шестой шатун, который другим концом связан с дополнительно установленным на первом шатуне промежуточным шарниром так, что консоль пятого шатуна, шестой шатун, участок первого шатуна от его промежуточного шарнира до шарнирного соединения его с кривошипом и участок кривошипа от его промежуточного шарнира до шарнирного соединения его с первым шатуном образуют параллелограмм, кроме этого на шестом шатуне установлен промежуточный шарнир на расстоянии от шарнира связи его с первым шатуном, равным длине участка первого шатуна между шарнирами связи кривошипа и шестого шатуна с первым шатуном, кроме этого механизм дополнительно снабжен вертикальным стержнем, который одним концом связан с промежуточным шарниром, установленным на шестом шатуне, а свободным концом скользит в шарнире четвертого шатуна, размещенным в шарнирном соединении кривошипа с первым шатуном и удерживает четвертый шатун в горизонтальном положении или под углом.
Сущность изобретения заключается в том, что механизм дополнительно снабжен пятым и шестым шатунами, длина первого шатуна равна одной длине кривошипа и одним концом первый шатун шарнирно связан с кривошипом, который дополнительно снабжен промежуточным шарниром, с которым связан одним концом пятый шатун, равный длине участка кривошипа от основания до его промежуточного шарнира, а своим другим концом пятый шатун шарнирно связан с ползуном и снабжен консолью, жестко связанной с ним, с которой шарнирно связан одним концом шестой шатун, который другим концом связан с дополнительно установленным на первом шатуне промежуточным шарниром так, что консоль пятого шатуна, шестой шатун, участок первого шатуна от его промежуточного шарнира до шарнирного соединения его с кривошипом и участок кривошипа от его промежуточного шарнира до шарнирного соединения его с первым шатуном образуют параллелограмм, что существенно уменьшает габариты механизма по вертикали и повышает его компактность. Кроме этого, дополненные к механизму пятый шатун с консолью и шестой шатун, связанный с первым шатуном, образующие параллелограмм, обеспечивают точное, как и у прототипа, прямолинейно-поступательное движение концевой точки первого шатуна, равного, в отличие от прототипа, одной длине кривошипа, и, соответственно, шарнир, связывающий первый и второй шатуны, будет двигаться так же прямолинейно поступательно по горизонтальной оси при более компактном механизме, что направлено на достижение заявленного технического результата.
Кроме этого, на шестом шатуне установлен промежуточный шарнир на расстоянии от шарнира связи его с первым шатуном, равным длине участка первого шатуна между шарнирами связи кривошипа и шестого шатуна с первым шатуном, кроме этого механизм дополнительно снабжен вертикальным стержнем, который одним концом связан с промежуточным шарниром, установленным на шестом шатуне, а свободным концом скользит в шарнире четвертого шатуна, размещенным в шарнирном соединении кривошипа с первым шатуном, и удерживает четвертый шатун в горизонтальном положении или под углом. Связанный параллелограммом с четвертым шатуном второй шатун превращается в звено механизма, движущиеся прямолинейно-поступательно при более компактном механизме, что существенно расширяет технические возможности применения механизма, повышает компактность кинематических связей с другими механизмами и системами и направлено на достижение технического результата.
Таким образом, путем введения дополнительных звеньев, иного выполнения и соединения звеньев и изменения их кинематических связей достигается заявленный технический результат - расширение технических возможностей применения механизма, повышение его компактности, повышение компактности связи механизма с другими механизмами и системами, а в новой совокупности признаков возникает новое техническое свойство механизма - при повороте кривошипа, как ведущего звена, второй шатун движется точно прямолинейно-поступательно относительно горизонтальной оси при более компактном механизме, что позволяет сделать вывод о соответствии изобретения критерию новизны и изобретательского уровня.
Заявляемое изобретение поясняется чертежами.
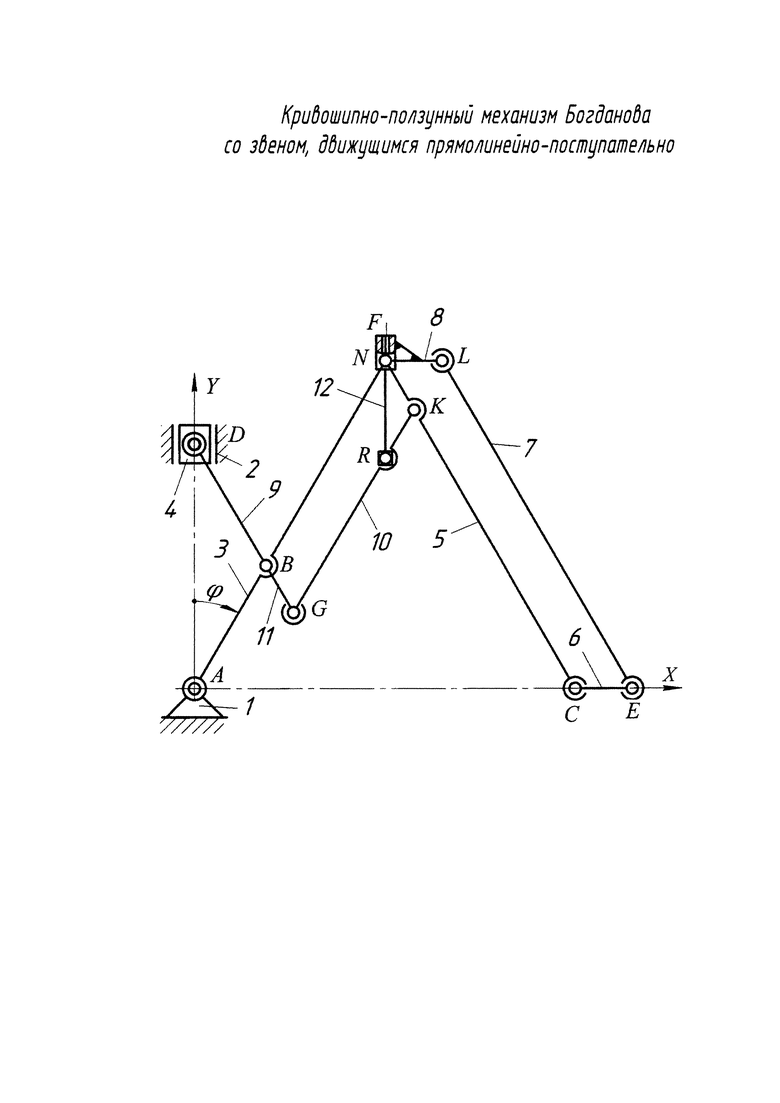
На чертеже показана схема кривошипно-ползунного механизма со звеном, движущимся прямолинейно-поступательно.
Механизм содержит основание 1 с прямолинейной направляющей 2, установленный на основании кривошип 3, ползун 4, установленный в направляющей 2, первый шатун 5, равный длине кривошипа 3. Первый шатун 5 связан одним концом шарниром N с кривошипом 3, а другим концом, шарниром C, связан со вторым шатуном 6. С другим концом второго шатуна 6 одним концом связан шарниром E третий шатун 7, который своим другим концом связан шарниром L с одним концом расположенного горизонтально четвертого шатуна 8, который равен длине второго шатуна 6.
Четвертый шатун 8 своим другим концом связан с шарниром F, размещенным в шарнирном соединении кривошипа 3 с первым шатуном 5, и образует с третьим 7, вторым 6 и первым шатунами параллелограмм FCEL.
Механизм снабжен пятым 9 и шестым 10 шатунами, а кривошип 3 снабжен промежуточным шарниром B. Пятый шатун 9 одним концом связан с кривошипом 3 промежуточным шарниром B, а другим концом, шарниром D, связан с ползуном 4 и снабжен консолью 11, жестко связанной с ним.
Шестой шатун 10 одним концом связан шарниром G с консолью 11 пятого шатуна 9, а другим концом связан с первым шатуном 5 промежуточным шарниром K, который размещен от шарнира N связи кривошипа 3 с первым шатуном 5 на расстоянии, равном длине консоли 11 пятого шатуна 9 так, что участок кривошипа 3 от шарнира N до шарнира B, консоль 11 пятого шатуна 9, шестой шатун 10 и участок первого шатуна 5 от его шарнира K до шарнира N связи кривошипа с первым шатуном, образуют параллелограмм BGKN.
На шестом шатуне установлен шарнир R, с которым связан одним концом вертикальный стержень 12, свободный конец которого скользит в шарнире четвертого шатуна 8, размещенном в шарнирном соединении N кривошипа 3 с первым шатуном 5.
Механизм работает следующим образом.
При повороте кривошипов 3 на угол ϕ от вертикальной оси Y направляющей 2, связанный с кривошипом пятый шатун 9 перемещает ползун 4 по направляющей 2. Шестой шатун 10, связанный шарниром G одним концом с консолью 11 пятого шатуна 9, а другим с шарниром K, входит в параллелограмм BGKN, и поэтому, в силу равенства длины первого шатуна 5 длине кривошипа 3, посредством этого параллелограмма обеспечивается движение концевой точки C первого шатуна 5 точно по горизонтальной оси X.
Вследствие равенства длины участка между шарниром R на шестом шатуне 10 и шарниром K на первом шатуне 5 длине участка между шарниром K и шарниром N связи первого шатуна 5 с кривошипом 3, стержень 12 располагается всегда вертикально. Вертикальный стержень 12 скользит в шарнире F четвертого шатуна 8 и при любом угловом положении кривошипа 3 удерживает всегда точное горизонтальное положении или под задаваемым углом четвертый шатун 8, так как он жестко связан с шарниром F.
Вместе с четвертым шатуном 8 параллелограммом NCEL удерживается в горизонтальном положении или под углом и второй шатун 6, что обуславливает его в механизме как звено, движущееся прямолинейно-поступательно по горизонтальной оси X.
Таким образом, предлагаемое изобретение, в сравнении с прототипом, расширяет технические возможности применения механизма, повышает его компактность, повышает компактность связи механизма с другими механизмами и системами. Такой механизм найдет применение в различных областях техники и, в частности, в землеройной технике и погрузочных устройствах, например, при разработке грейферных устройств с шарнирной рамой регулируемой конструкции с широким раздвижением и раскрытием челюстей для разработки грунтов и погрузки материалов, размещенных тонким слоем.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ БОГДАНОВА СО ЗВЕНОМ, ДВИЖУЩИМСЯ ПРЯМОЛИНЕЙНО-ПОСТУПАТЕЛЬНО | 2015 |
|
RU2609844C2 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ БОГДАНОВА СО ЗВЕНОМ, ДВИЖУЩИМСЯ ПРЯМОЛИНЕЙНО-ПОСТУПАТЕЛЬНО | 2015 |
|
RU2609843C2 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ БОГДАНОВА СО ЗВЕНОМ, ДВИЖУЩИМСЯ ПРЯМОЛИНЕЙНО-ПОСТУПАТЕЛЬНО | 2013 |
|
RU2568160C2 |
| СИММЕТРИЧНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ БОГДАНОВА | 2015 |
|
RU2609848C2 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ БОГДАНОВА СО ЗВЕНОМ, ДВИЖУЩИМСЯ ПРЯМОЛИНЕЙНО-ПОСТУПАТЕЛЬНО | 2013 |
|
RU2553613C1 |
| СИММЕТРИЧНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ БОГДАНОВА | 2014 |
|
RU2568159C2 |
| ГРЕЙФЕР | 1993 |
|
RU2082854C1 |
| Кривошипно-ползунный механизм с звеном, движущимся прямолинейно-поступательно | 1988 |
|
SU1605059A1 |
| Устройство для очистки каналов | 1986 |
|
SU1328445A1 |
| Симметричный кривошипно-ползунный механизм | 1985 |
|
SU1270461A1 |
Изобретение относится к области машиностроения, а более конкретно к кривошипно-ползунным механизмам. Кривошипно-ползунный механизм со звеном, движущимся прямолинейно-поступательно, содержит основание, ползун, кривошип и шесть шатунов. Кривошип снабжен промежуточным шарниром, с которым шарнирно связан одним концом пятый шатун, который другим концом шарнирно связан с ползуном. Пятый шатун снабжен консолью, жестко связанной с ним, а с консолью связан шарнирно одним концом шестой шатун. Шестой шатун своим другим концом связан с дополнительно установленным на первом шатуне промежуточным шарниром. Консоль пятого шатуна, шестой шатун, участок первого шатуна от его промежуточного шарнира до шарнирного соединения его с кривошипом и участок кривошипа от его промежуточного шарнира до шарнирного соединения его с первым шатуном образуют параллелограмм. Достигается компактность механизма. 1 ил.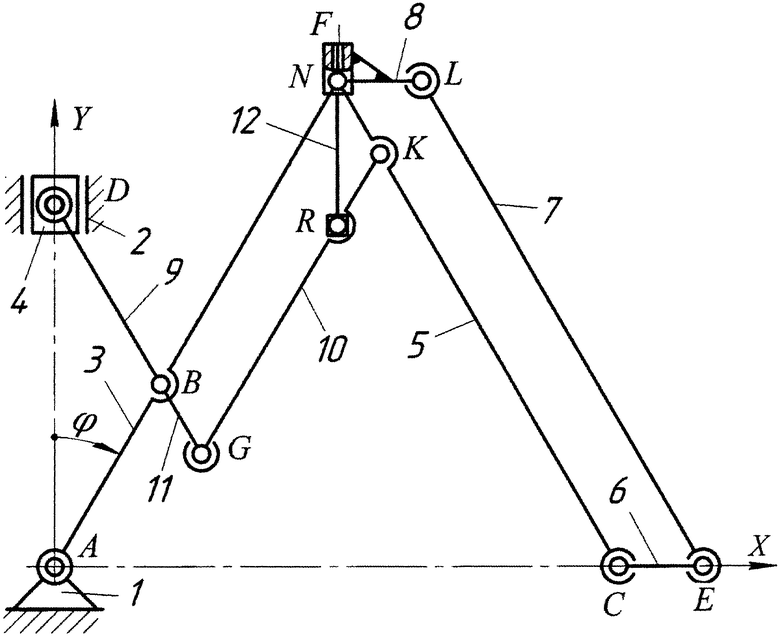
Кривошипно-ползунный механизм со звеном, движущимся прямолинейно-поступательно, содержащий основание с прямолинейной направляющей, установленный в направляющей ползун, установленный на основании кривошип, первый шатун, который шарнирно связан с кривошипом, а с другим концом шатуна одним концом шарнирно связан второй шатун, с другим концом которого шарнирно связан одним концом третий шатун, который равен длине кривошипа и связан другим концом шарнирно с одним концом расположенного горизонтально или под углом четвертого шатуна, равным длине второго шатуна, и который другим концом связан с шарниром, размещенным в шарнирном соединении кривошипа с первым шатуном, и образует с третьим, вторым и первым шатунами параллелограмм, отличающийся тем, что механизм дополнительно снабжен пятым и шестым шатунами, длина первого шатуна равна одной длине кривошипа и одним концом первый шатун шарнирно связан с кривошипом, который дополнительно снабжен промежуточным шарниром, с которым связан одним концом пятый шатун, равный длине участка кривошипа от основания до его промежуточного шарнира, а своим другим концом пятый шатун шарнирно связан с ползуном и снабжен консолью, жестко связанной с ним, с которой шарнирно связан одним концом шестой шатун, который другим концом связан с дополнительно установленным на первом шатуне промежуточным шарниром так, что консоль пятого шатуна, шестой шатун, участок первого шатуна от его промежуточного шарнира до шарнирного соединения его с кривошипом и участок кривошипа от его промежуточного шарнира до шарнирного соединения его с первым шатуном образуют параллелограмм, кроме этого, на шестом шатуне установлен промежуточный шарнир на расстоянии от шарнира связи его с первым шатуном, равным длине участка первого шатуна между шарнирами связи кривошипа и шестого шатуна с первым шатуном, кроме этого, механизм дополнительно снабжен вертикальным стержнем, который одним концом связан с промежуточным шарниром, установленным на шестом шатуне, а свободным концом скользит в шарнире четвертого шатуна, размещенном в шарнирном соединении кривошипа с первым шатуном, и удерживает четвертый шатун в горизонтальном положении или под углом.
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ БОГДАНОВА СО ЗВЕНОМ, ДВИЖУЩИМСЯ ПРЯМОЛИНЕЙНО-ПОСТУПАТЕЛЬНО | 2013 |
|
RU2568160C2 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ БОГДАНОВА СО ЗВЕНОМ, ДВИЖУЩИМСЯ ПРЯМОЛИНЕЙНО-ПОСТУПАТЕЛЬНО | 2013 |
|
RU2553613C1 |
| US 20120180752 A1, 19.07.2012 | |||
| WO 2009006682 A1, 15.01.2009. | |||

