Изобретение относится к области гидроакустической техники и может быть использовано в составе оборудования, обеспечивающего воспроизведение рельефа дна в реальном масштабе времени.
Известно устройство гидроакустической системы для визуализации подводного пространства на основе многоканального технологического комплекса для исследования шельфа, содержащее модуль гидролокатора бокового обзора (ГБО), модуль сейсмоакустического профилографа, модуль эхолота, навигационную систему, блок обработки и регистрации, блок оперативной контрольной информации, блок синхронной индикации и регистрации, коммутатор режимов работы, причем ГБО содержит буксируемую на кабель-тросе гондолу, которая оснащена гидроакустическими антеннами, аналого-цифровым преобразователем, управляющим компьютером с монитором и блоками графической и магнитной регистрации. (Свидетельство на полезную модель РФ №16406, МПК G01V 1/38, G 05D 27/00, опубл. 27.12.2000 г.)
Недостатком устройства является невозможность воспроизведения с его помощью рельефа дна и наличие невидимой зоны в центре полосы обзора.
Известно устройство гидроакустической системы для визуализации подводного пространства на основе морского геоакустического комплекса «МАК», содержащее бортовой модуль судна-носителя, соединенный кабель-тросом с буксируемым аппаратным модулем, включающим последовательно соединенные блок сбора данных измерений и блок регистрации и обработки информации, при этом забортный буксируемый модуль включает гидролокатор бокового обзора (ГБО) дальнего действия, ГБО высокого разрешения, акустический профилограф, эхолот, гидроакустическую навигационную систему, синтезатор зондирующих сигналов, интерфейс сигналов управления, датчики пространственного положения буксируемого модуля, блок цифровых датчиков, блок датчика давления и аналоговых датчиков, интерфейс аналоговых датчиков, кабельный интерфейс, цифровой приемопередатчик, одноплатную ЭВМ и блок питания буксирного модуля, связанные посредством системной шины данных и управления, причем выходы синтезатора зондирующих сигналов подключены к первым входам гидролокатора обзора дальнего действия, гидролокатора бокового обзора высокого разрешения, акустического профилографа, эхолота и маяка-ответчика, входы-выходы интерфейса сигналов управления подключены ко вторым входам блоков гидролокатора бокового обзора дальнего действия, гидролокатора бокового обзора высокого разрешения, акустического профилографа, эхолота и маяка-ответчика, выходы которых подключены к входам кабельного интерфейса, с входом-выходом которого связан цифровой приемопередатчик. (Свидетельство на полезную модель РФ №38233, МПК G01V 1/38, G05D 27/00, опубл. 27.05.2004 г.)
Недостатком устройства также является невозможность воспроизведения рельефа дна и наличие невидимой зоны.
Наиболее близким по технической сущности и достигаемому результату к предлагаемому изобретению (прототипом) является известная гидроакустическая система для визуализации подводного пространства, содержащая блоки антенн левого и правого бортов, выходы которых соединены с соответствующими последовательно включенными приемными усилителями и аналого-цифровыми преобразователями, а входы соединены с выходами усилителей мощности, измеритель крена, модуль формирования, приема и упаковки сигналов, ко входам которого подключены аналого-цифровые преобразователи, усилители мощности и измеритель крена, блок интерфейса, навигационную систему и бортовой компьютер, причем ко входу бортового компьютера подключены выход навигационной системы и через блок интерфейса выход модуля формирования, приема и упаковки сигналов, а также блоки приемной антенны профилографа и первую и вторую антенны накачки профилографа. (Матвиенко Ю.В., Воронин В.А., Тарасов СП., Скнаря А.В., Тутынин Е.В. Пути совершенствования гидроакустических технологий обследования морского дна с использованием автономных необитаемых подводных аппаратов / Подводные исследования и робототехника. 2009. №2(8) с.4-15).
Благодаря использованию интерферометрических гидролокаторов бокового обзора (ИГБО) прототип позволяет воспроизводить рельеф дна. Однако в полосе его обзора по-прежнему сохраняется невидимая зона. Кроме того, построение точного рельефа возможно лишь в процессе вторичной обработки с использованием данных, полученных на разных галсах.
Техническим результатом изобретения является обеспечение непрерывной полосы обзора дна и формирование рельефа дна в реальном масштабе времени.
Технический результат достигается за счет того, что гидроакустическая система для визуализации подводного пространства, содержащая блоки антенн левого и правого бортов, выходы которых соединены с соответствующими последовательно включенными приемными усилителями и аналого-цифровыми преобразователями, а входы соединены с выходами усилителей мощности, измеритель крена, модуль формирования, приема и упаковки сигналов, к которому подключены выходы аналого-цифровых преобразователей и измерителя крена, входы усилителей мощности и блока интерфейса, навигационную систему и бортовой компьютер, причем ко входу бортового компьютера подключены выход навигационной системы и через блок интерфейса выход модуля формирования, приема и упаковки сигналов, снабжена антенной многолучевого эхолота, последовательно соединенными блоками приемных усилителей и блоками аналого-цифровых преобразователей, включенными между выходом антенны многолучевого эхолота и модулем формирования, приема и упаковки сигналов, блоком усилителей мощности, включенным между входом антенны многолучевого эхолота и выходом модуля формирования, приема и упаковки сигналов, а также подключенным ко входу этого блока измерителем глубины.
Сущность изобретения поясняется чертежами. На Фиг.1 представлена блок-схема предлагаемого устройства, а на Фиг.2 - блок-схема компьютерной обработки сигналов.
Гидроакустическая система для визуализации подводного пространства содержит блоки антенн левого и правого бортов 1 и 1', выходы которых соединены с соответствующими последовательно включенными приемными усилителями 2 и 2' и аналого-цифровыми преобразователями 3 и 3', а входы соединены с выходами усилителей мощности 4 и 4', антенну многолучевого эхолота 5, приемные элементы которой последовательно соединены со входами блоков приемных усилителей 6 и блоками аналого-цифровых преобразователей 7, блок усилителей мощности 8, подключенный к излучающим элементам антенны многолучевого эхолота 5, измеритель крена 9, измеритель глубины 10, модуль формирования, приема и упаковки сигналов 11, блок интерфейса 12, навигационную систему 13 и бортовой компьютер 14, при этом ко входам модуля формирования, приема и упаковки сигналов 11 подключены аналого-цифровые преобразователи 3, 3' и блок 7, усилители мощности 4, 4' и блоки 8, измеритель крена 9 и измеритель глубины 10, а ко входам бортового компьютера 14 подключены навигационная система 13 и через блок интерфейса 12 выход модуля формирования, приема и упаковки сигналов.
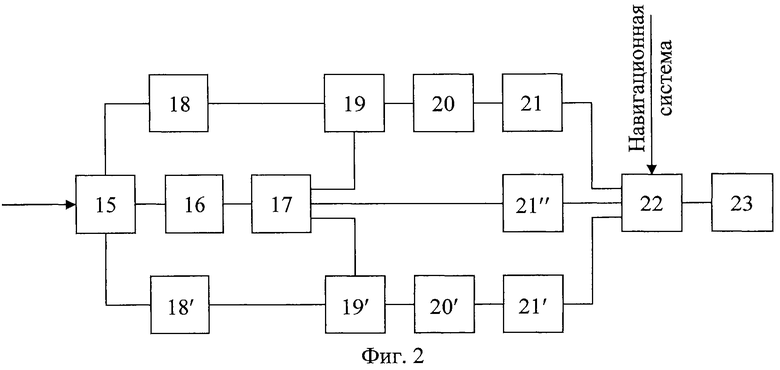
Блок-схема системы компьютерной обработки сигналов содержит блок считывания и распаковки сигналов 15, последовательно подключенные к его выходу блок формирования характеристик направленности 16, блок оценки времен задержки эхо-сигналов 17, а также последовательно подключенные к выходу блока 15 соответственно блоки измерения фазы и амплитуды 18 и 18', блоки оценки начальной фазы 19 и 19', блоки оценки углов падения лучей 20 и 20', а также блоки вычисления координат точек пересечения лучей с поверхностью дна 21, 21' и 21", блок привязки координат пересечения с дном к географической карте 22 и блок графического отображения 23. Устройство работает следующим образом.
Излучаемые сигналы формируются блоком 11 и последовательно подключаются к блокам усилителей мощности 4, 4' и 8 и излучающим антеннам 1, 1' и 5. Конструктивно антенны выполнены таким образом, что ширина луча каждой из антенн достаточно узка вдоль направления движения и широка в поперечном направлении, причем сектор обзора антенны 5 приходится на середину полосы обзора дна, а сектора обзора антенн левого и правого бортов 1 и 1' расположены слева и справа от носителя и пересекаются с сектором обзора многолучевого эхолота. Приемная антенна многолучевого эхолота 5 состоит из ряда элементов, расположенных вдоль линии (или дуги), обращенной вниз и лежащей в плоскости, перпендикулярной направлению движения. Блоки антенн каждого борта 1 и 1' состоят из двух направленных приемников с узкой характеристикой направленности в продольном направлении и достаточно широкой в вертикальной плоскости. Сигналы с выхода элементов приемных антенн 1, 1' и 5 усиливаются в блоках 2, 2' и 6, оцифровываются в блоках 3, 3' и 7 и поступают в блок 11, в котором происходит упаковка принятых сигналов для последующей передачи их через блок интерфейса 12 на бортовой компьютер 14. К сигналам с приемных антенн 1, 1' и 5 в блоке 11 примешиваются сигналы с выхода измерителя крена 9 и измерителя глубины 10, к бортовому компьютеру 14 дополнительно подключается навигационная система 13, обеспечивающая необходимое информационное обеспечение для привязки воспроизводимого рельефа дна к географической карте. Обработка сигналов в бортовом компьютере 14 осуществляется следующим образом. Сигналы от блока интерфейса 12 принимаются блоком считывания и распаковки сигналов 15 и распределяются на три потока, соответствующие сигналам от блоков приемных антенн многолучевого эхолота 5 и блоков антенн 1 и 1' левого и правого бортов. По совокупности сигналов от элементов приемной антенны многолучевого эхолота в блоке 16 формируется веер характеристик направленности, оси которых равномерно распределены по ширине сектора обзора многолучевого эхолота. Для каждого сформированного луча в блоке 17 вычисляется корреляционная функция принятого сигнала с излученным и по положению максимума корреляционной функции оценивается время задержки эхо-сигнала, приходящего от точки пересечения луча с дном. Таким образом, на выходе блока 17 формируется совокупность времен задержки τ(αi) и максимумов корреляционной функции А(αi) для каждого луча, характеризуемого углом αi.
По сигналам с выхода пар приемных антенн левого и правого бортов в блоках 18 и 18' соответственно производятся текущие оценки амплитуды эхо-сигнала и фазового сдвига между сигналами на выходах пары антенн. Амплитуда сигнала определяется путем сложения квадратов реальной и мнимой частей с выхода каждой антенны:

где Re1, Im1, Re2 и Im2 - реальные и мнимые компоненты сигналов на выходе первой и второй антенны соответственно.
Фазовый сдвиг определяется известным способом:

Вследствие периодичности функции арктангенса данная оценка фазового сдвига производится с точностью до постоянной величины, кратной π.
Фазовому сдвигу соответствует угол падения луча α:

где β - угол наклона линии, соединяющей линейные антенны ГБО;
d - расстояние между линейными антеннами ГБО;
λ - длина волны излучения в воде.
Неоднозначность оценки фазового сдвига приводит к неоднозначности определения угла падения луча. В устройстве прототипа для устранения неоднозначности воспроизведение рельефа дна осуществляется вторичная обработка с использованием данных, полученных на нескольких галсах. В предлагаемом устройстве неоднозначность определения фазового сдвига устраняется в блоках 19 и 19' непосредственно в процессе обработки текущих данных. Достигается это тем, что для идентификации соответствия между фазовым сдвигом и углом падения луча используются данные многолучевого эхолота. По полученной совокупности задержек τ(αi) каждому времени t можно поставить в соответствие угол падения луча α, для которого время задержки сигнала равно t. Выбрав некоторое опорное время t0 можно определить соответствующий начальный угол α0 и в соответствии с формулой (2) поставить ему начальную фазу Δφ0.

где γ0 - значение крена носителя на момент времени t0.
В блоках 20 и 20' вычисляется текущий угол падения луча. Уравнение для вычисления этого угла получается путем вычитания (3) из (2):

Благодаря тому, что в формуле пересчета используется разность фазовых сдвигов в начальный и текущий моменты времени, неоднозначность вычисления фазы в начальный момент времени становится неактуальной. Однако при вычислении фазового сдвига в текущий момент времени необходимо учитывать приращения фазы, кратные 2π. Для этого необходимо осуществлять подсчет интерференционных полос и с появлением каждой новой полосы прибавлять 2π к текущей оценке фазы, выполненной по формуле (1).
Таким образом, на выходе блоков 20 и 20' для каждого момента времени формируются оценки углов падения луча на поверхность дна. В блоках 21, 21' и 21" по полученным оценкам зависимости угла α, для текущего времени ti производится вычисление координат пересечения с дном. В предположении, что скорость звука с по глубине остается неизменной, координаты Хα,i и Zα,i точки пересечения луча с дном относительно центра соответствующей антенны определяются аналитически:
Для определения координат точки пересечения луча с дном в условиях известного распределения скорости звука по глубине может быть использована лучевая программа, которая для заданного угла падения луча строит траекторию распространения луча и вычисляет время распространения вдоль этой траектории. Траектория луча строится до тех пор, пока время распространения звука по лучу не буде равно половине текущего времени. Совокупность концов построенных траекторий определяет координаты точек Хα,i, Zα,i на поверхности рельефа в системе координат соответствующей антенны. В блоке 22 производится пересчет этих точек в географической карте местности по следующей формуле:
Xi=ХН+(Хα+Xα,i)cosK+(Yα-LГ)sin K
Yi=YH+(Yα-LГ)cos К+(Xα+Xα,i)sin К
Zi=HПM+Zα+Zi
где ХН и YH -географические координаты носителя гидролокатора, определяемые навигационной системой носителя;
LГ - горизонтальное расстояние между началами координат носителя и подводного модуля гидролокатора.
К - курсовой угол движения носителя;
Xα, Yα, Zα - координаты фазового центра антенны относительно центра подводного модуля гидролокатора.
НПМ - глубина погружения подводного модуля.
Вся полученная информация выводится в графическом виде на блок отображения принятой информации 23.
Изобретение в отличие от прототипа обеспечивает:
- непрерывную полосу обзора дна за счет того, что полоса невидимости антенн правого и левого бортов перекрывается многолучевым эхолотом;
- формирование рельефа дна в реальном масштабе времени благодаря устранению по каждой посылке зондирующих сигналов неоднозначности углов прихода отраженных дном сигналов на блоки антенн правого и левого бортов путем использования данных многолучевого эхолота в перекрывающихся секторах обзора.
Фиг.1
1, 1' - блоки антенн левого и правого бортов
2, 2' - приемные усилители
3, 3' - аналого-цифровые преобразователи
4, 4' - усилители мощности
5 - антенна многолучевого эхолота (МЛЭ)
6 - блок приемных усилителей
7 - блок аналого-цифровых преобразователей
8 - блок усилителей мощности
9 - кренометр
10 - измеритель глубины
11 - блок формирования, приема и упаковки сигналов (блок управления?)
12 - блок интерфейса
13 - навигационная система
14 - компьютер
Фиг.2
15 - Блок считывания и распаковки сигналов
16 - блок формирования характеристики направленности (ХН)
17 - блок оценки времен задержки эхо-сигналов
18, 18' - блоки измерения фазы и амплитуды
19, 19' - блок оценки начальной фазы
20, 20' - блок оценки углов падения лучей
21,21', 21" - блоки вычисления координат точек пересечения лучей с поверхностью дна
22 - блок привязки координат пересечения с дном к географической карте
23 - блок графического отображения
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА ВИЗУАЛИЗАЦИИ ПОДВОДНОГО ПРОСТРАНСТВА | 2014 |
|
RU2572666C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| СИСТЕМА И СПОСОБ 3D ИССЛЕДОВАНИЯ МОРСКОГО ДНА ДЛЯ ИНЖЕНЕРНЫХ ИЗЫСКАНИЙ | 2015 |
|
RU2608301C2 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| ФАЗОВЫЙ ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА | 2012 |
|
RU2510045C2 |
| СИСТЕМА НАВИГАЦИИ БУКСИРУЕМОГО ПОДВОДНОГО АППАРАТА | 2013 |
|
RU2529207C1 |
| СПОСОБ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2013 |
|
RU2563332C2 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ | 2012 |
|
RU2519269C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
Изобретение относится к области гидроакустической техники и может быть использовано в составе оборудования, обеспечивающего получение изображения рельефа дна в реальном масштабе времени. Техническим результатом изобретения является обеспечение непрерывной полосы обзора дна и формирование рельефа дна в реальном масштабе времени. Гидроакустическая система для визуализации подводного пространства содержит блоки антенн левого и правого бортов 1 и 1', приемные усилители 2 и 2', аналого-цифровые преобразователи 3 и 3', усилители мощности 4 и 4', антенну многолучевого эхолота 5, блоки приемных усилителей 6, блоки аналого-цифровых преобразователей 7, блок усилителей мощности 8, измеритель крена 9, измеритель глубины 10, модуль формирования, приема и упаковки сигналов 11, блок интерфейса 12, навигационную систему 13 и бортовой компьютер 14. Изобретение обеспечивает непрерывную полосу обзора дна за счет того, что полоса невидимости антенн правого и левого бортов перекрывается многолучевым эхолотом, формирование рельефа дна в реальном масштабе времени, более высокую точность и надежность воспроизведения рельефа за счет высокой точности и надежности устранения неоднозначности вычисления фазового сдвига на антеннах. 2 ил.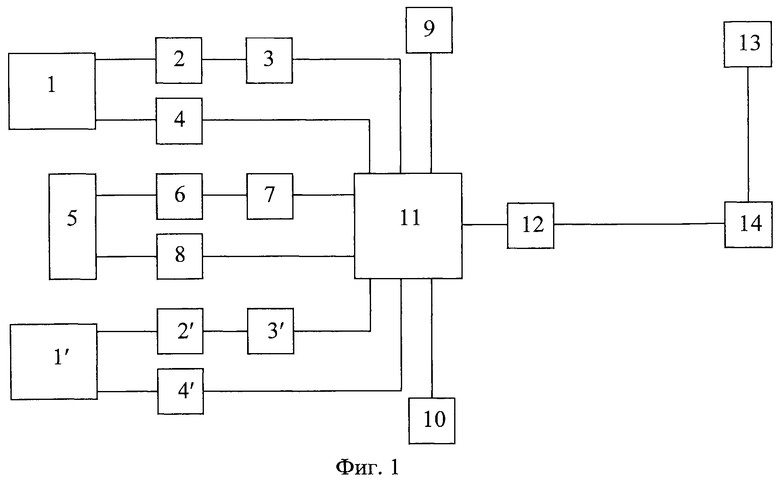
Гидроакустическая система для визуализации подводного пространства, содержащая блоки антенн левого и правого бортов, выходы которых соединены с соответствующими последовательно включенными приемными усилителями и аналого-цифровыми преобразователями, а входы соединены с выходами усилителей мощности, измеритель крена, модуль формирования, приема и упаковки сигналов, ко входам которого подключены аналого-цифровые преобразователи, усилители мощности и измеритель крена, блок интерфейса, навигационную систему и бортовой компьютер, причем ко входу бортового компьютера подключены выход навигационной системы и через блок интерфейса выход модуля формирования, приема и упаковки сигналов, отличающаяся тем, что она снабжена антенной многолучевого эхолота, последовательно соединенными блоком приемных усилителей и блоком аналого-цифровых преобразователей, включенными между выходом антенны многолучевого эхолота и модулем формирования, приема и упаковки сигналов, блоком усилителей мощности, включенным между входом антенны многолучевого эхолота и выходом модуля формирования, приема и упаковки сигналов, а также подключенным ко входу этого блока измерителем глубины.
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2340916C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФОРМЫ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ДИСКРЕТНЫХ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326408C1 |
| Способ определения глубин акватории фазовым гидролокатором бокового обзора и фазовый гидролокатор бокового обзора для его осуществления | 1991 |
|
SU1829019A1 |
| Захватное устройство | 1987 |
|
SU1426786A1 |
| US 5400300 А, 21.03.1995 | |||
| JP 63027785 A, 05.02.1988. | |||

