Уровень техники
Область техники
Настоящее изобретение относится к вибрационному измерителю и соответствующему способу и, более конкретно, к вибрационному измерителю и способу для определения резонансной частоты.
Постановка задачи
Вибрационные трубопроводные датчики, например, массовые расходомеры Кориолиса и вибрационные денситометры, обычно функционируют посредством регистрации перемещения колеблющегося трубопровода, который содержит текущий материал. Свойства, связанные с материалом в трубопроводе, например, массовый расход, плотность и т.п., могут быть определены обработкой измерительных сигналов, принятых от преобразователей перемещения, связанных с трубопроводом. Колебательные моды колеблющейся и заполненной материалом системы обычно определяются суммарной массой, жесткостью и параметрами демпфирования самого трубопровода и содержащегося в нем материала.
Типичный расходомер Кориолиса включает в себя в себя один или несколько трубопроводов, которые соединяются в линейную магистраль, или другую транспортную систему, и транспортируют в системе материал, например, флюиды, шламы, эмульсии и т.п. Каждый трубопровод можно рассматривать как систему, имеющую набор собственных колебательных мод, включающий в себя, например, простые изгибные, крутильные, радиальные, и моды смешанного типа. В типичном применении метода Кориолиса для измерений массового расхода, трубопровод возбуждается на одной или нескольких колебательных модах, когда материал течет через трубопровод, и смещение трубопровода регистрируется в точках, разнесенных вдоль трубопровода. Возбуждение обычно обеспечивается приводом, например, электромеханическим устройством, таким, как индукционный привод, работающий на звуковых частотах, который периодически возмущает трубопровод. Массовый расход может быть определен по измерению временной задержки, или по разности фаз, между смещениями в местоположениях датчиков-преобразователей. Для измерения колебательного отклика расходомерного трубопровода, или трубопроводов, обычно используются два таких преобразователя (или измерительных преобразователя), и обычно они располагаются в положениях выше и ниже по течению относительно привода. Два измерительных преобразователя обычно соединяются с электронным измерительным прибором. Измерительный прибор принимает сигналы от двух измерительных преобразователей и обрабатывает сигналы для получения, среди прочего, измерения массового расхода.
Вибрационные измерители, например, массовые расходомеры Кориолиса и вибрационные денситометры, могут зафиксировать и измерить резонансную частоту колеблющегося расходомерного трубопровода, или трубопроводов. Резонансная частота может содержать резонансную частоту пустого расходомерного трубопровода, или трубопроводов, или может содержать резонансную частоту заполненного флюидом вибрационного измерителя. Текучий материал может течь или быть стационарным. Измеренная частота колебаний пустого трубопровода(-ов) потока может быть учтена при обработке измеренной резонансной частоты заполненного флюидом вибрационного измерителя, чтобы получить плотность только флюида.
Резонансная частота может быть использована для определения плотности (ρ) текущего материала. Плотность может быть определена из соотношения ρ=C (1/f)2, где f - измеренная резонансная частота, и C - калибровочная постоянная. Кроме того, резонансная частота может быть использована при определении массового расхода текущего материала и может быть полезной при получении других параметров флюида.
Текучий материал может содержать любого рода флюиды, включая в себя жидкости, газы, или смеси жидкостей, газов, и/или твердых веществ. Поскольку газы имеют намного меньшие плотности, по сравнению с жидкостями, любая ошибка в измеренной резонансной частоте будет влиять на измерения плотности газа намного больше, чем эта же ошибка будет влиять на измерения плотности жидкости. Кроме того, малая ошибка в частоте может давать большую ошибку определения плотности газа, по сравнению с ошибкой определения плотности жидкости.
Объекты изобретения
В одном объекте изобретения, вибрационный измеритель содержит:
один или несколько расходомерных трубопроводов;
один или несколько измерительных преобразователей, прикрепленных к одному или нескольким расходомерным трубопроводам;
привод, сконфигурированный для возбуждения колебаний одного или нескольких расходомерных трубопроводов; и
измерительную электронику, связанную с одним или несколькими измерительными преобразователями и с приводом, измерительную электронику, сконфигурированную для возбуждения колебаний одного или нескольких расходомерных трубопроводов вибрационного измерителя, используя приводной сигнал, включающий в себя начальную частоту колебаний, и для приема в ответ на это сигнала измерительного преобразователя от одного или нескольких измерительных преобразователей, итерационного смещения разности фаз между приводным сигналом, и сигналом измерительного преобразователя на заданное приращение фазы, и измерения результирующей частоты и амплитуды колебаний, со смещением, эффективно свипирующим (качающим) частоту колебаний по заданному частотному диапазону колебаний и, поэтому, получения множества амплитуд колебаний и соответствующего множества частот колебаний, и определения по существу отклика с максимальной амплитудой для множества амплитуд колебаний, и определения соответствующей частоты колебаний как содержащей резонансную частоту.
Предпочтительно, измерительная электроника дополнительно сконфигурирована для измерения результирующей частоты колебаний и результирующей амплитуды колебаний, после заданного установочного периода, из смещения.
Предпочтительно, приводной сигнал включает в себя по существу постоянную амплитуду.
Предпочтительно, вибрационный измеритель содержит вибрационный денситометр, вибрационный газовый денситометр, или массовый расходомер Кориолиса.
Предпочтительно, измерительная электроника дополнительно сконфигурирована, чтобы использовать резонансную частоту для получения одного или нескольких количественных определений текущего материала.
Предпочтительно, заданный частотный диапазон колебаний выбирается так, чтобы включать в себя предполагаемую резонансную частоту.
Предпочтительно, измерительная электроника дополнительно сконфигурирована для сужения заданного частотного диапазона колебаний до заданного суженного частотного диапазона после того, как резонансная частота найдена, и смещение и определение повторяются, чтобы зафиксировать резонансную частоту в пределах заданного суженного частотного диапазона.
Предпочтительно, измерительная электроника дополнительно сконфигурирована для сужения заданного частотного диапазона колебаний до заданного суженного частотного диапазона после того, как резонансная частота найдена, с заданным суженным частотным диапазоном, по существу сцентрированным на найденной резонансной частоте, и смещение и определение повторяются, чтобы зафиксировать резонансную частоту в пределах заданного суженного частотного диапазона.
Предпочтительно, измерительная электроника дополнительно сконфигурирована для расширения заданного частотного диапазона колебаний до заданного расширенного частотного диапазона, если резонансная частота не найдена, и, причем смещение и определение повторяются, чтобы зафиксировать резонансную частоту в пределах заданного расширенного частотного диапазона.
Предпочтительно, резонансная частота может быть определена для одного или обоих из конкретного вибрационного измерителя или конкретного текущего материала.
В одном объекте изобретения, способ определения резонансной частоты в вибрационном измерителе содержит:
возбуждение колебаний одного или нескольких расходомерных трубопроводов вибрационного измерителя, используя приводной сигнал, включающий в себя начальную частоту колебаний, и прием в ответ на это сигнала измерительного преобразователя;
итерационное смещение разности фаз между приводным сигналом и сигналом измерительного преобразователя на заданное приращение фазы и измерение результирующей частоты и амплитуды колебаний, со смещением, эффективно свипирующим частоту колебаний по заданному частотному диапазону колебаний и, поэтому, получение множества амплитуд колебаний и соответствующего множества частот колебаний; и
определение по существу отклика с максимальной амплитудой для множества амплитуд колебаний и обозначения соответствующей частоты колебаний как содержащей резонансную частоту.
Предпочтительно, способ дополнительно содержит измерение результирующей частоты колебаний и результирующей амплитуды колебаний после заданного установочного периода времени от смещения.
Предпочтительно, приводной сигнал включает в себя по существу постоянную амплитуду.
Предпочтительно, вибрационный измеритель содержит вибрационный денситометр, вибрационный газовый денситометр, или массовый расходомер Кориолиса.
Предпочтительно, способ дополнительно содержит использование резонансной частоты для получения одного или нескольких количественных определений текущего материала.
Предпочтительно, заданный частотный диапазон колебаний выбирается так, чтобы включать в себя предполагаемую резонансную частоту.
Предпочтительно, заданный частотный диапазон колебаний сужен до заданного суженного частотного диапазона после того, как резонансная частота найдена, причем смещение и определение повторяются, чтобы зафиксировать резонансную частоту в пределах заданного суженного частотного диапазона.
Предпочтительно, заданный частотный диапазон колебаний сужен до заданного суженного частотного диапазона после того, как резонансная частота найдена, с заданным суженным частотным диапазоном, по существу сцентрированным на найденной резонансной частоте, и смещение и определение повторяются, чтобы зафиксировать резонансную частоту в пределах заданного суженного частотного диапазона.
Предпочтительно, заданный частотный диапазон колебаний расширен до заданного расширенного частотного диапазона, если резонансная частота не найдена, и, причем смещение и определение повторяются, чтобы зафиксировать резонансную частоту в пределах заданного расширенного частотного диапазона.
Предпочтительно, резонансная частота может быть определена для одного или обоих из конкретного вибрационного измерителя или конкретного текущего материала.
Описание чертежей
Фиг.1 изображает вибрационный измеритель, содержащий сборку вибрационного измерителя и измерительную электронику в соответствии с вариантом реализации изобретения.
Фиг.2 - измерительная электроника, связанная со сборкой вибрационного измерителя в соответствии с вариантом реализации изобретения.
Фиг.3 - блок-схема последовательности операций для способа определения резонансной частоты в вибрационном измерителе в соответствии с вариантом реализации изобретения.
Фиг.4 - график приводного сигнала в зависимости от получающегося тензометрического сигнала при нормальной работе вибрационного измерителя.
Фиг.5 - график приводного сигнала в зависимости от тензометрического сигнала, когда тензометрический сигнал больше не находится в фазе с приводным сигналом.
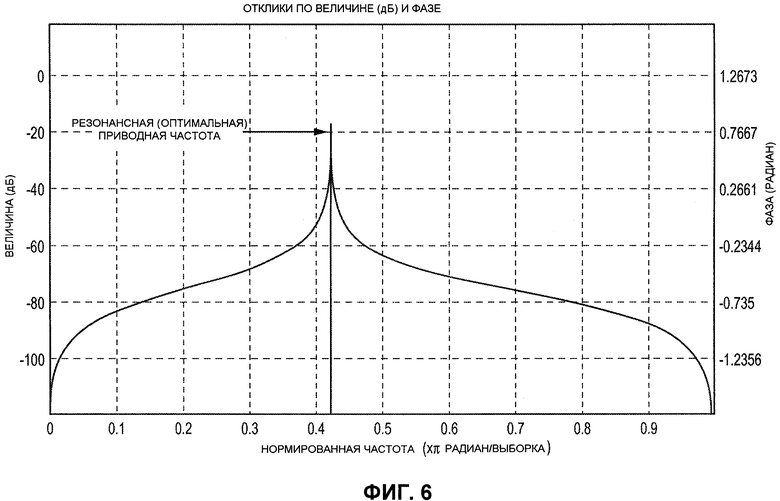
Фиг.6 - график частоты приводного сигнала (горизонтальная ось) в зависимости от разности фаз привод-измерительный преобразователь (правая боковая ось), в зависимости от амплитуды тензометрического сигнала (левая боковая ось) в примере определения резонансной частоты.
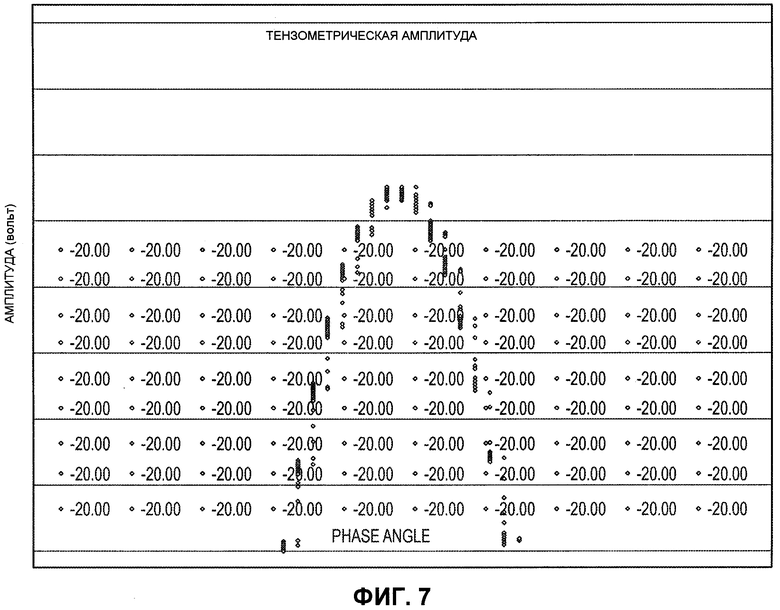
Фиг.7 - результаты регулировки относительной фазы между тензометрическим сигналом и приводом на газовом денситометре.
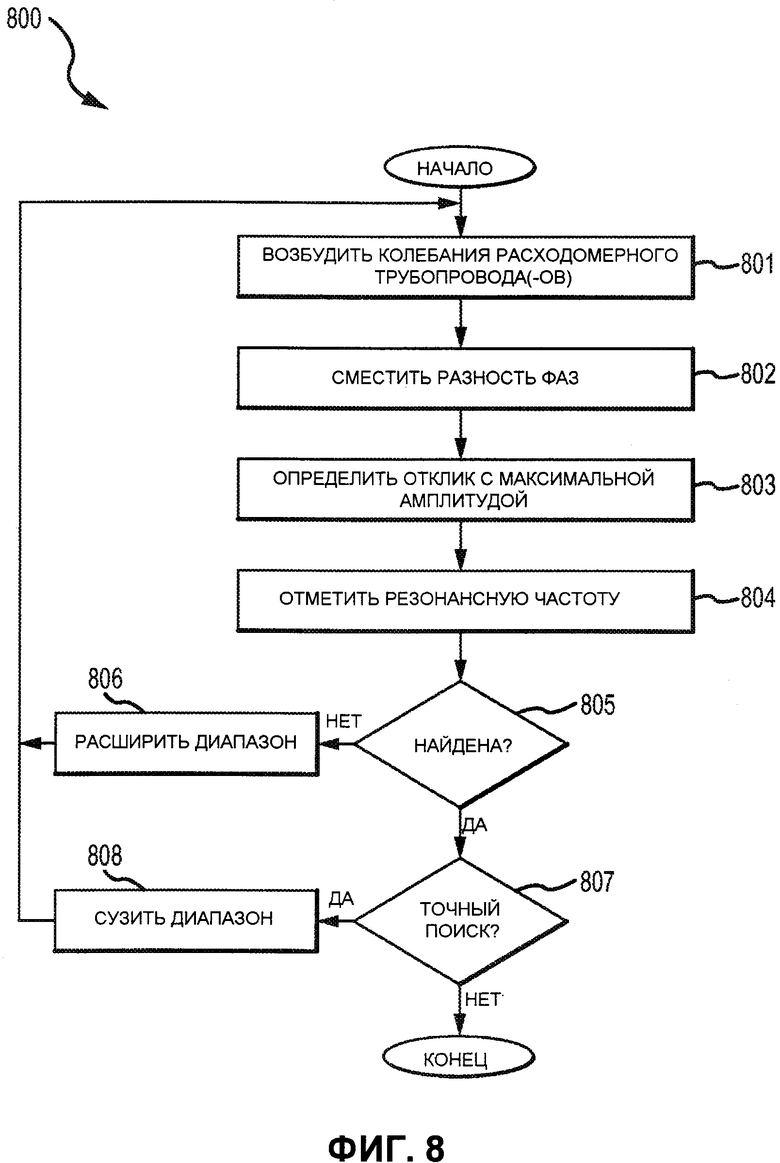
Фиг.8 - блок-схема последовательности операций для способа определения резонансной частоты в вибрационном измерителе в соответствии с вариантом реализации изобретения.
Подробное описание изобретения
Чертежи на Фиг.1-8 и нижеследующее описание демонстрируют конкретные примеры для пояснения специалистам в данной области техники того, как реализовать и использовать наилучший вариант изобретения. С целью пояснения принципов изобретения, некоторые обычные объекты были упрощены или исключены. Специалисты в данной области техники увидят возможные вариации этих примеров, которые находятся в пределах объема притязаний изобретения. Специалисты в данной области техники увидят, что описанные ниже признаки могут быть различным образом скомбинированы, образуя множественные вариации изобретения. Таким образом, изобретение не ограничивается описанными ниже конкретными примерами, но только пунктами формулы и их эквивалентами.
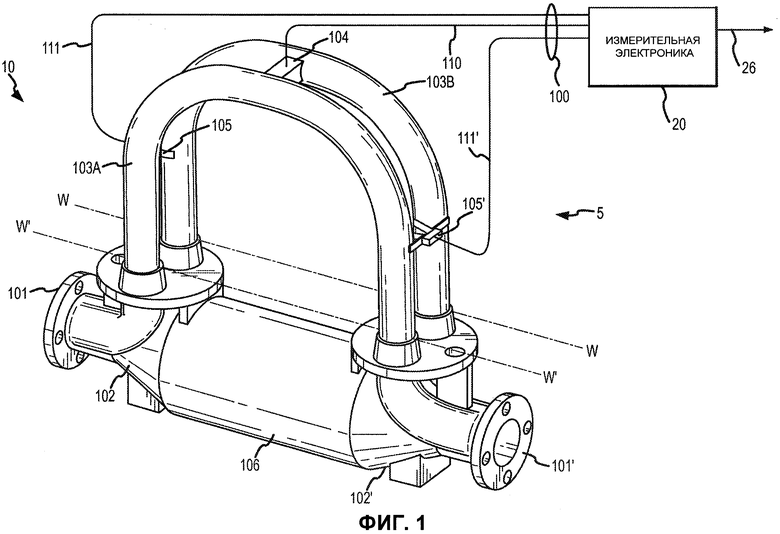
На Фиг.1 показан вибрационный измеритель 5, содержащий сборку 10 вибрационного измерителя и измерительную электронику 20 в соответствии с вариантом реализации изобретения. Вибрационный измеритель 5 может содержать массовый расходомер Кориолиса, а также может функционировать как вибрационный денситометр. Измерительная электроника 20 соединяется с измерительной сборкой 10 через кабельные соединения 100 для предоставления плотности, массового расхода, объемного расхода, суммарного массового расхода, температуры, а также предоставления другой информации по каналу 26.
Сборка 10 вибрационного измерителя включает в себя пару фланцев 101 и 101′, манифольды 102 и 102′, привод 104, измерительные преобразователи 105-105′, и расходомерные трубопроводы 103A и 103B. Привод 104 и измерительные преобразователи 105 и 105′ присоединены к расходомерным трубопроводам 103A и 103B. Следует понимать, что вибрационный измеритель 5 может включать в себя расходомерные трубопроводы 103A, 103B любой формы, размера, материала, или конфигурации. Вибрационный измеритель 5 может включать в себя любое число расходомерных трубопроводов.
Фланцы 101 и 101′ прикреплены к манифольдам 102 и 102′. Манифольды 102 и 102′ прикреплены к противоположным концам разделителя (проставки) 106. Проставка 106 поддерживает определенное расстояние между манифольдами 102 и 102′, чтобы предотвратить нежелательные колебания в трубопроводах 103A и 103B. Когда сборка 10 вибрационного измерителя вставляется в трубопроводную магистраль (не показана), которая транспортирует измеряемый материал, материал входит в сборку 10 вибрационного измерителя через фланец 101, проходит через впускной манифольд 102, где суммарное количество материала направляется в трубопроводы 103A и 103B, протекает через трубопроводы 103A и 103B, и назад, в выпускной манифольд 102′, где материал выходит из сборки 10 измерителя через фланец 101′.
Расходомерные трубопроводы 103A и 103B соответственно выбираются и монтируются на впускном манифольде 102 и выпускном манифольде 102′ так, чтобы иметь по существу одно и то же массовое распределение, моменты инерции, и упругие модули относительно изгибных осей W--W и W′--W′, соответственно. Расходомерные трубопроводы вытянуты наружу от манифольдов по существу параллельным образом.
Расходомерные трубопроводы 103A-B приводятся в движение приводом 104 в противоположных направлениях относительно их соответственных изгибных осей W и W′, и колебания возбуждаются на, так называемой, первой несинфазной изгибной моде расходомера. Привод 104 может содержать одну из многих хорошо известных конфигураций, например, магнит, установленный на расходомерном трубопроводе 103A, и противостоящую индукционную катушку, установленную на расходомерном трубопроводе 103B. Переменный ток проходит через противостоящую катушку, вызывая колебания обоих трубопроводов. Соответствующий приводной сигнал подается измерительной электроникой 20 через соединительный кабель 110 на привод 104.
Измерительная электроника 20 передает сигналы датчика на соединительные кабели 111 и 111′, соответственно. Измерительная электроника 20 производит приводной сигнал на соединительном кабеле 110, который заставляет привод 104 возбуждать колебания в расходомерных трубопроводах 103A и 103B. Измерительная электроника 20 обрабатывает сигналы левой и правой скорости, которые принимаются от измерительных преобразователей 105 и 105′, чтобы рассчитать измерение массового расхода. Канал 26 предоставляет входное и выходное средство, которое позволяет измерительной электронике 20 взаимодействовать с оператором и/или взаимодействовать другими устройствами.
Описание Фиг.1 предоставляется исключительно как пример функционирования расходомера Кориолиса и/или вибрационного денситометра, и не предназначено для ограничения принципов настоящего изобретения.
Вибрационный измеритель 5 в некоторых вариантах реализации содержит денситометр. Вибрационный измеритель 5 в некоторых вариантах реализации содержит газовый денситометр. Альтернативно, вибрационный измеритель 5 может содержать массовый расходомер Кориолиса.
На Фиг.2 показана измерительная электроника 20, связанная со сборкой 10 вибрационного измерителя в соответствии с вариантом реализации изобретения. Измерительная электроника 20 включает в себя петлю 202 обратной связи. Петля 202 обратной связи принимает сигнал измерительного преобразователя от сборки 10 вибрационного измерителя. Петля 202 обратной связи создает приводной сигнал и предоставляет приводной сигнал для сборки 10 вибрационного измерителя.
Петля 202 обратной связи в показанном варианте реализации включает в себя фазосдвигающее устройство 201, цифро-аналоговый (D/A) преобразователь 202, аналого-цифровой (A/D) преобразователь 203, и фазовый датчик 204. При работе, фазосдвигающее устройство 201 создает цифровой приводной сигнал, который преобразуется в аналоговый приводной сигнал посредством D/A 202 и предоставляется на датчик 200 флюида. Тензометрический сигнал предоставляется на A/D 203, который оцифровывает аналоговый тензометрический сигнал и предоставляет его на фазосдвигающее устройство 201. Фазовый датчик 204 сравнивает фазу входного сигнала (то есть, приводного сигнала) с фазой выходного сигнала (то есть, тензометрического сигнала), и создает сигнал разности фаз, который предоставляется на фазосдвигающее устройство 201. В результате, фазосдвигающее устройство 201 может управлять сдвигом фазы и частотой приводного сигнала, предоставляемого на датчик 200 флюида. Не показан усилитель, который может регулировать амплитуду приводного сигнала. Амплитуда приводного сигнала обычно бывает больше, чем амплитуда тензометрического сигнала.
Поэтому, измерительная электроника 20 принимает сигнал измерительного преобразователя и создает приводной сигнал, по меньшей мере, частично, на основании тензометрического сигнала датчика. Частота приводного сигнала может быть основанной на частоте тензометрического сигнала, или быть идентичной частоте тензометрического сигнала. Амплитуда приводного сигнала может быть основанной на амплитуде тензометрического сигнала, или быть идентичной амплитуде тензометрического сигнала. Разность фаз между фазой приводного сигнала и фазой тензометрического сигнала также может быть определена и управляться измерительной электроникой 20.
Кроме того, измерительная электроника 20 может функционировать так, чтобы определять резонансную частоту сборки 10 вибрационного измерителя. Измерительная электроника 20 сконфигурирована для возбуждения колебаний одного или нескольких расходомерных трубопроводов 103 сборки 10 вибрационного измерителя, используя приводной сигнал, включающий в себя начальную частоту колебаний, и для приема сигнала измерительного преобразователя от одного или нескольких измерительных преобразователей 105, 105′ в ответ на это, для итерационного смещения разности фаз между приводным сигналом и сигналом измерительного преобразователя на заданное приращение фазы, и для измерения результирующей частоты и амплитуды колебаний, со смещением, эффективно свипирующим частоту колебаний по заданному частотному диапазону колебаний и, поэтому, формирования множества амплитуд колебаний и соответствующего множества частот колебаний, и определения по существу отклика с максимальной амплитудой для множества амплитуд колебаний и обозначения соответствующей частоты колебаний, как содержащей резонансную частоту.
Измерительная электроника 20 сконфигурирована для управления фазой между входным сигналом и выходным сигналом датчика 200 флюида так, чтобы смещать разность фаз и, поэтому, изменять частоту колебаний. Частота колебаний делается изменяемой посредством смещения разности фаз, хотя частота может и не мгновенно следовать за смещением фазы. Измерительная электроника 20 в некоторых вариантах реализации находится в состоянии ожидания в течение установочного периода после смещения фазы и перед измерением результирующей частоты колебаний. Например, в некоторых вариантах реализации, заданный установочный период может составлять приблизительно 50 миллисекунд. Однако, другие периоды установления сигнала также предполагаются находящимися в пределах объема притязаний описания и формулы.
Измерительная электроника 20 сконфигурирована для итерационного смещения разности фаз так, чтобы качать частоту колебаний по заданному частотному диапазону колебаний при поддержании системы под управлением с обратной связью. Такое управление фазой может быть осуществлено в цифровой форме, используя стандартные методики с петлей фазовой синхронизации. В одном варианте реализации, управление с обратной связью может быть выполнено соответственно запрограммированным Процессором цифровых сигналов (DSP). Однако, другая обратная связь или методики с обратной связью также могут быть применены и также предполагаются находящимися в пределах объема притязаний описания и формулы.
Аппарат и способ точно определяют резонансную частоту. Когда плотность газа или жидкости изменяется, изменяется и резонансная частота датчика. Определяемая резонансная частота может быть использована для получения точного измерения плотности. Кроме того, определяемая резонансная частота может также быть использована для получения оптимальной частоты привода.
Аппарат и способ находят специальное применение в вибрационных газовых денситометрах, когда вариации плотности газа относительно малы. Точное определение резонансной частоты очень важно в вибрационных денситометрах. Следовательно, любые ошибки в определении резонансной частоты для газа могут иметь относительно большое влияние на точность измерения плотности. Аппарат и способ могут также использоваться в жидкостном или многофазном денситометрах. Газовые денситометры могут отличаться от жидкостных денситометров, поскольку конструируются как имеющие более низкую изгибную жесткость и более высокую частоту колебаний. Однако, точное определение частоты и/или плотности также желательны в жидкостных или многофазных денситометрах. Определяемая резонансная частота может также быть использована в массовых расходомерах Кориолиса, хотя фиксирование фактической резонансной частоты для измерения массового расхода может не быть столь же критичным, как для измерений плотности.
Определяемая резонансная частота может быть использована для получения количественных определений текущего материала. Определяемая резонансная частота может быть использована для определения плотности текущего материала. Определяемая резонансная частота может быть использована для определения массового расхода текущего материала. Другие количественные определения текущего материала включают в себя объемное содержание газовой фазы, содержание жидкой фазы, массовую долю, вязкость, и/или объемный расход. Дополнительные количественные определения текущего материала также предполагаются находящимися в пределах объема притязаний описания и формулы.
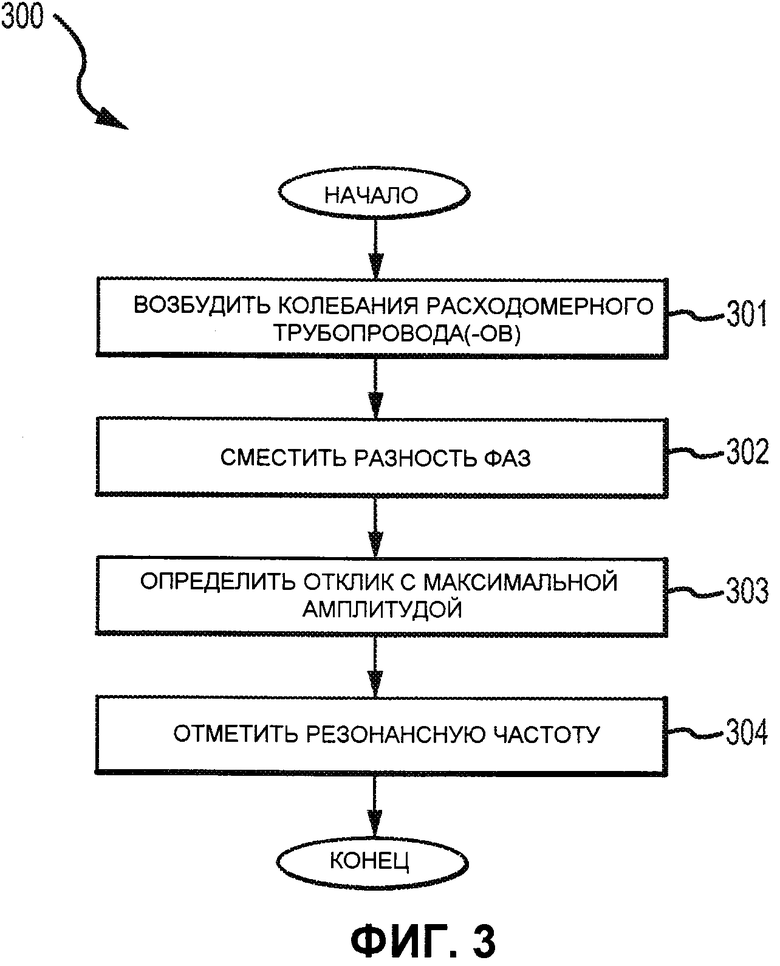
На Фиг.3 показана блок-схема 300 последовательности операций способа определения резонансной частоты в вибрационном измерителе в соответствии с вариантом реализации изобретения. На этапе 301, один или несколько расходомерных трубопроводов 105, 105′ вибрационного измерителя 5 приводятся в колебательное движение, используя привод 104 и приводной сигнал. Приводной сигнал включает в себя частоту колебаний. В начале поиска резонансной частоты, частота колебаний содержит начальную частоту колебаний. Приводной сигнал также включает в себя амплитуду колебаний. В некоторых вариантах реализации, амплитуда колебаний поддерживается по существу на постоянном уровне. В результате, сигнал колебаний может задавать по существу постоянную энергию колебаний.
Измерительная электроника 20 создает приводной сигнал, используя сигнал измерительного преобразователя из одного из сигналов измерительных преобразователей. Для формирования приводного сигнала необходим только один сигнал измерительных преобразователей. Кроме того, только один сигнал измерительных преобразователей необходим для определения резонансной частоты. Сигнал измерительного преобразователя от любого из измерительных преобразователей 105 или 105′ может быть использован при определении резонансной частоты.
Сигнал измерительного преобразователя соотносится с приводным сигналом по частоте, фазе, и амплитуде. Однако, сигнал измерительного преобразователя не обязательно должен быть идентичен приводному сигналу. Сигнал измерительного преобразователя имеет меньшую амплитуду, чем приводной сигнал, поскольку происходит некоторая потеря амплитуды. Сигнал измерительного преобразователя может иметь отличающуюся частоту, поскольку один или несколько расходомерных трубопроводов 105, 105′ могут колебаться на одной или на нескольких образующихся частотах, которые могут отличаться от частоты привода, в частности, когда резонансная частота предполагается, но не найдена. Наконец, сигнал измерительного преобразователя может отставать по фазе от приводного сигнала, например, при нормальной работе, и/или когда частота приводного сигнала остается в значительной степени постоянной во времени.
На этапе 302, разность фаз смещается на заданное приращение фазы. Разность фаз содержит различие между фазой приводного сигнала и фазой сигнала измерительного преобразователя. Заданное приращение фазы может быть постоянным по величине, или может быть ступенчатым, или изменяться так, как это желательно. В некоторых случаях, разность фаз смещается по существу от нулевой разности фаз. Альтернативно, смещение фазы может быть добавлено к существующей разности фаз.
Частота колебаний не изменяется непосредственно смещением фазы.
Однако, частота колебаний изменяется в результате смещения разности фаз. Заданный установочный период, возможно, должен истечь, чтобы гарантировать, что частота колебаний изменилась в результате смещения фазы. В результате повторяющегося смещения разности фаз частота колебаний (итерационно) качается по заданному частотному диапазону колебаний.
Заданный частотный диапазон колебаний может содержать диапазон частот, который предположительно включает в себя резонансную частоту. Однако, фактическая плотность газа может варьироваться в соответствии с условиями окружающей среды, включающими в себя изменение температуры и давления, например. Ожидаемое изменение резонансной частоты может быть малым для газа, например, меньше одного Герца. Плотность газа может изменяться медленно или может измениться по существу мгновенно. В результате, резонансная частота заполненного газом вибрационного измерителя может изменяться во времени. Изменение резонансной частоты коррелирует с изменением плотности, причем плотность (ρ) содержит ρ=Cdensity(1/f)2. Величина Cdensity может содержать калибровочную постоянную.
В технике предшествующего уровня, частота качается для регистрации отклика с максимальной амплитудой и последующего нахождения резонансной частоты. В технике предшествующего уровня, разность фаз рассматривалась как в значительной степени фиксированная, и не учитывалась при определении резонансной частоты. К сожалению, вариации разности фаз, и отсутствие компенсации какой-либо разности фаз, приводили в технике предшествующего уровня к нахождению неточного значения резонансной частоты.
На этапе 303, поскольку разность фаз смещается для качания частоты колебаний по заданному частотному диапазону колебаний, результирующая амплитуда сигнала измерительного преобразователя контролируется. Определяется по существу отклик с максимальной амплитудой. Кроме того, определяется соответствующая частота колебаний. В данном случае, отклик с максимальной амплитудой сигнала измерительных преобразователей будет наблюдаться тогда, когда частота колебаний является по существу резонансной частотой.
Как предварительно рассмотрено, в некоторых вариантах реализации способ предполагает ожидание в течение установочного периода после смещения фазы перед измерением результирующей частоты колебаний. Например, в некоторых вариантах реализации, заданный установочный период может составлять приблизительно 50 миллисекунд. Однако, другие установочные периоды также предполагаются находящимися в пределах объема притязаний описания и формулы.
На этапе 304 определяется резонансная частота. Смещение разности фаз используется для увеличения или уменьшения частоты колебаний и получения множества частот колебаний и соответствующего множества амплитуд колебаний. Отклик с максимальной амплитудой по существу соответствует резонансной частоте, как предварительно рассмотрено. Резонансная частота определяется как содержащая частоту колебаний среди множества частот колебаний, которая обеспечивает отклик с максимальной амплитудой. Альтернативно, резонансная частота может быть отмечена, когда отмеченная частота колебаний наиболее близка для отклика с максимальной амплитудой, когда резонансная частота возникает между двумя смежными частотами колебаний.
Точность определяемой резонансной частоты может контролироваться выбором величины заданного приращения фазы. Величина заданного приращения фазы может быть выбрана так, чтобы достичь желаемого разрешения по частоте и желаемой точности. Меньшее приращение фазы даст более точную резонансную частоту, при более высоком разрешении по частоте, но может потребовать большего количества итераций и, поэтому, большего времени поиска. Но разрешающая способность может быть очень высокой, если это желательно, например, с возможностью разрешения резонансной частоты в масштабе нескольких миллигерц (мГц) в некоторых вариантах реализации.
Определяемая резонансная частота может быть использована для получения одного или нескольких количественных определений текущего материала, как предварительно рассмотрено. Определяемая резонансная частота может быть определена для конкретного вибрационного измерителя. Определяемая резонансная частота может быть найдена для вибрационного измерителя в любое время, например, во время нормальной работы. Альтернативно, определяемая резонансная частота может быть найдена как часть операции калибровки, или проверки работоспособности измерителя, например. Определяемая резонансная частота может быть определена для конкретного текущего материала. Например, определяемая резонансная частота может быть получена, когда новый текучий материал начинает измеряться. Альтернативно, определяемая резонансная частота может быть найдена и для конкретного вибрационного измерителя, и для конкретного текущего материала.
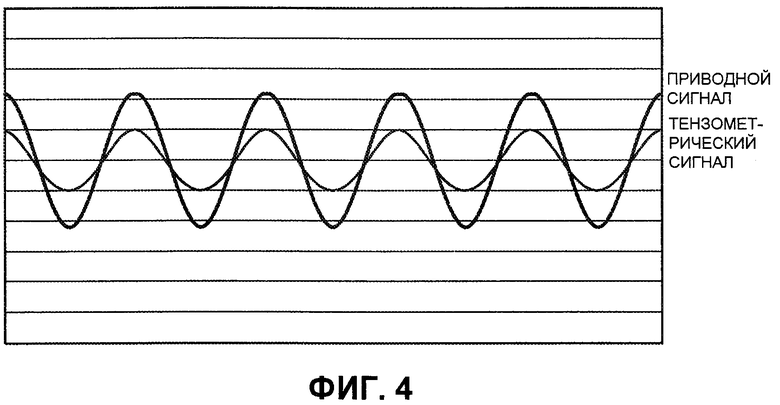
На Фиг.4 показан график приводного сигнала в зависимости от получающегося тензометрического сигнала при нормальной работе вибрационного измерителя 5. График отражает типичную работу колебательной системы, причем вибрационный измеритель 5 работает практически в установившихся условиях. В результате, приводной сигнал и тензометрический сигнал находятся по существу в фазе. Амплитуда приводного сигнала обычно превышает амплитуду тензометрического сигнала, как это показано, так, когда энергия добавляется к системе для поддержания установившихся колебаний.
В идеальном случае, фаза приводного сигнала точно совпадает с фазой тензометрического входного сигнала (или не совпадает по фазе на 180 градусов, в зависимости от ориентации). Однако, все системы с обратной связью имеют некоторый источник потенциального сдвига фазы и, поэтому, при работе оказывается возможным возбуждать колебания несколько вне резонанса.
Проблема с традиционными системами с обратной связью в применении такого типа заключается в том, что разность фаз между тензометрическим сигналом и приводным сигналом будет влиять на фактическую частоту колебаний измерителя. Поскольку частота сборки 10 вибрационного измерителя пропорциональна плотности, то любая неточность в определяемой частоте, например, разность фаз, может привести к ошибкам измерения частоты.
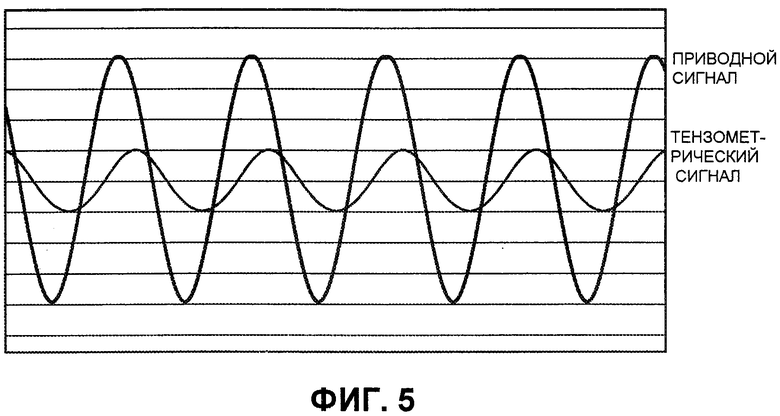
На Фиг.5 показан график приводного сигнала в зависимости от тензометрического сигнала, когда тензометрический сигнал находится уже не в фазе с приводным сигналом. Если сигналы не находятся в фазе, то возникают две проблемы. Во-первых, требуется больше приводной мощности для достижения той же самой тензометрической амплитуды. Это показано на чертеже, где приводной сигнал теперь имеет много большую амплитуду, чем тензометрический сигнал. К сожалению, увеличение мощности привода снижает максимальную доступную передаваемую мощность в привод, снижает эффективность привода и, в конечном счете, ухудшает рабочие параметры вибрационного измерителя 5.
Вторая проблема заключается в том, что управляя приводом не в фазе, фактически измеряемая частота оказывается не резонансной частотой. Кроме того, изменения в окружающей рабочей среде (например, изменения температуры), старение сборки 10 вибрационного измерителя, и/или повреждения компонент, увеличат эту ошибку во времени. Следовательно, имеется потребность в возможности определения резонансной частоты. Имеется потребность в возможности определения резонансной частоты в различные моменты времени, например, в течение срока эксплуатации вибрационного измерителя 5. Имеется потребность точного определения резонансной частоты без какой-либо разности фаз, влияющей на точность определяемой резонансной частоты.
На Фиг.6 показан график частоты приводного сигнала (горизонтальная ось) в зависимости от разности фаз привод- измерительный преобразователь (правая боковая ось), в зависимости от амплитуды тензометрического сигнала (левая боковая ось) в примере определения резонансной частоты. На графике, мощность привода установлена постоянной, тогда как фаза приводного сигнала относительно тензометрического сигнала была итерационно смещена. Типичное приращение фазы может быть в диапазоне приблизительно от (-1,2356) до (+1,2673) градусов смещения фазы, например. Однако, другие приращения фазы также предполагаются находящимися в пределах объема притязаний описания и формулы.
Определение резонансной частоты использует преимущества резонансной природы считывающего элемента, то есть, резонансного отклика, который может быть получен в сборке 10 вибрационного измерителя. Датчик демонстрирует очень острый пик амплитуды на резонансной частоте. Смещая фазу приводного сигнала относительно фазы тензометрического сигнала, оказывается возможным сместить частоту колебаний вверх и вниз по частотному спектру. Здесь можно видеть, что величина тензометрического сигнала демонстрирует острый (то есть, резонансный) пик, поскольку частота колебаний вынуждена изменяться при смещении разности фаз.
На Фиг.7 показан результат смещения относительной фазы между тензометрическим сигналом и приводным сигналом в газовом денситометре. Когда датчик возбуждается на резонансной частоте, тензометрическая амплитуда имеет свой максимум. Фиксируя пик с использованием этого алгоритма, оказывается возможным гарантировать, что передатчик производит по существу оптимальный приводной сигнал.
На Фиг.8 показана блок-схема 800 последовательности операций способа определения резонансной частоты в вибрационном измерителе в соответствии с вариантом реализации изобретения. На этапе 801, в одном или нескольких расходомерных трубопроводах 105, 105′ вибрационного измерителя 5 возбуждаются колебания, как предварительно рассмотрено.
На этапе 802, разность фаз смещается на заданное приращение фазы, как предварительно рассмотрено.
На этапе 803, результирующая амплитуда сигнала измерительных преобразователей контролируется, как предварительно рассмотрено.
На этапе 804, определяется резонансная частота, как предварительно рассмотрено.
На этапе 805, если резонансная частота была найдена, то способ переходит на этап 807. В противном случае, когда резонансная частота не была найдена, способ ответвляется на этап 806.
На этапе 806, расширяется заданный частотный диапазон колебаний. Способ тогда возвращается назад на этап 801 и поиск резонансной частоты повторяется, но с расширенным заданным частотным диапазоном колебаний.
Заданный частотный диапазон колебаний может быть расширен на заданную величину. Например, заданный частотный диапазон колебаний может быть увеличен на пятьдесят процентов, может быть удвоен, или может быть расширен другими способами и на другие величины. В результате, качание частоты охватит больший диапазон частот. Это может быть сделано для того, чтобы начать с узкой полосы, с относительно высоким разрешением поиска, причем поиск резонансной частоты в широкой полосе, с грубым разрешением, выполняется только, если поиск резонансной частоты в узкой полосе оказывается неудачным.
Заданное приращение фазы может поддерживаться тем же самым. Альтернативно, для поиска резонансной частоты в широкой полосе, с грубым разрешением, заданное приращение фазы может быть сделано большим, в соответствии с более широким заданным частотным диапазоном колебаний, или может быть сделано меньшим, для получения более высокого разрешения по частоте, даже когда сканируется более широкий заданный частотный диапазон колебаний.
На этапе 807, если необходим точный поиск, программа способа переходит на этап 808.
В противном случае, когда в более узкой полосе, точный поиск резонансной частоты не необходим, способ выходит из программы.
Решение может быть автоматическим решением, причем выполняется грубый поиск, и затем выполняется точный поиск, с новым, узким заданным частотным диапазоном колебаний, используемым для точного поиска. Новый, узкий заданный частотный диапазон колебаний может быть сцентрирован на определяемой резонансной частоте, или может включать в себя определяемую резонансную частоту, найденную на этапе 804.
Альтернативно, потребность в точном поиске может быть основанной на оценочной резонансной частоте. Она может быть определена из произведенных частот колебаний, на которых не возникает максимальная амплитуда колебаний, или в пределах заданного их порога, частоты колебаний, которая произвела максимальную амплитуду колебаний. Например, два идентичных наибольших значения амплитуды могут быть произведены на двух смежных частотах, причем фактический пик амплитуды отклика будет постоянно находиться где-то между двумя частотами колебаний. Однако, если фактический пик находится в пределах заданного порога, способ может предоставить заключение, что точный поиск не необходим.
Следует понимать, что способ определения резонансной частоты может включать в себя и процесс расширения, и процесс сужения, как показано в блок-схеме последовательности операций. Альтернативно, способ может включать в себя только процесс расширения для выполнения более грубого поиска. Еще в одной альтернативе, способ может включать в себя только процесс сужения для выполнения более точного поиска.
Вибрационный измеритель и способ в соответствии с изобретением могут использоваться в соответствии с любым из вариантов реализации, чтобы предоставить несколько преимуществ, если это желательно. Вибрационный измеритель и способ могут предоставить более точное определение резонансной частоты, чем посредством изменения частоты колебаний, поскольку изменение частоты колебаний может привести к вариации разности фаз, которая искажает определение частоты.
Вибрационный измеритель и способ могут требовать меньшего уровня мощности при управлении в фазе с тензометрическим сигналом. Вибрационный измеритель и способ могут предоставить улучшенную регистрацию резонансной частоты, управляя одним или несколькими расходомерными трубопроводами по существу при постоянной мощности. Управляя одним или несколькими расходомерными трубопроводами по существу при постоянной мощности, увеличение амплитуды сигнала измерительного преобразователя не может быть обусловлено увеличением колебательной мощности.
Вибрационный измеритель и способ могут обеспечить улучшенную регистрацию резонансной частоты, не изменяя частоту и фазу одновременно. Поскольку фаза сигнала измерительных преобразователей может отличаться от фазы приводного сигнала во время качания частоты, то более точным и надежным будет изменение только разности фаз, при поддержании постоянной частоты колебаний.
Вибрационный измеритель и способ могут обеспечить улучшенную регистрацию резонансной частоты в денситометрах. Вибрационный измеритель и способ могут обеспечить улучшенную регистрацию резонансной частоты в газовых денситометрах, где измеряемая плотность мала, и малые погрешности играют большую роль.
Вибрационный измеритель и способ могут обеспечить улучшенную регистрацию резонансной частоты, причем резонансная частота может быть определена для конкретного вибрационного измерителя. Вибрационный измеритель и способ могут обеспечить улучшенную регистрацию резонансной частоты, причем резонансная частота может быть определена для конкретного текущего материала.
Вибрационный измеритель и способ позволяют осуществлять периодический контроль резонансной частоты. Вибрационный измеритель и способ позволяют осуществлять сравнение резонансных частот во времени для оценки состояния данного вибрационного измерителя.
Подробные описания вышеупомянутых вариантов реализации представляют собой неисчерпывающие описания всех вариантов реализации, рассматриваемых изобретателями как находящиеся в пределах объема притязаний изобретения. Действительно, специалисты в данной области техники увидят, что некоторые элементы вышеописанных вариантов реализации могут по-разному быть объединены или устранены, образуя дополнительные варианты реализации, и такие дополнительные варианты реализации находятся в пределах объема притязаний и принципов изобретения. Специалистам в данной области техники также будет очевидно, что вышеописанные варианты реализации могут быть объединены полностью или частично, образуя дополнительные варианты реализации в пределах объема притязаний и принципов изобретения. Соответственно, объем притязаний изобретения должен быть определен из нижеследующей формулы.
Предложен вибрационный измеритель (5), включающий в себя один или несколько расходомерных трубопроводов (103), один или несколько измерительных преобразователей (105, 105′) и привод (104). Измерительная электроника (20) сконфигурирована для возбуждения колебаний одного или нескольких расходомерных трубопроводов (103), используя приводной сигнал, включающий в себя начальную частоту колебаний, для приема сигнала измерительного преобразователя от одного или нескольких измерительных преобразователей (105, 105′), в ответ на это, итерационного смещения разности фаз между приводным сигналом и сигналом измерительного преобразователя на заданное приращение фазы и измерения результирующей частоты и амплитуды колебаний со смещением, эффективно свипирующим частоты колебаний по заданному частотному диапазону колебаний, и получения множества амплитуд колебаний и соответствующего множества частот колебаний и для определения по существу отклика с максимальной амплитудой для множества амплитуд колебаний и определения соответствующей частоты колебаний, как содержащей резонансную частоту. Причем электроника сконфигурирована для измерения результирующей частоты и амплитуды колебаний после заданного установочного периода смещения. 2 н. и 16 з.п. ф-лы, 8 ил.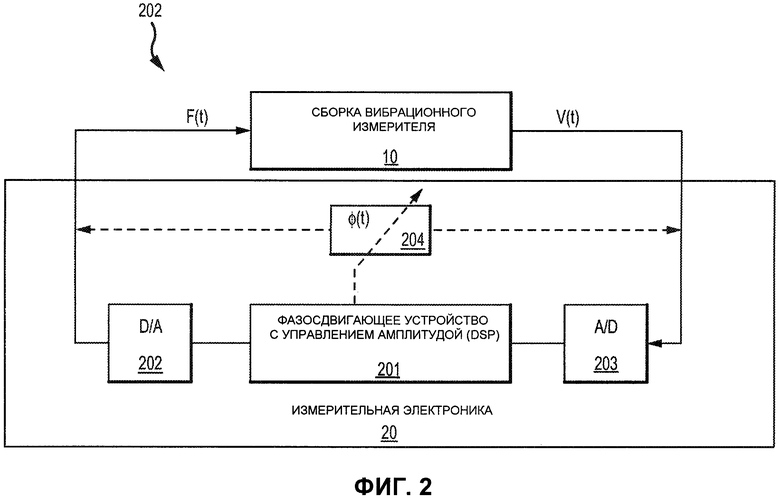
1. Вибрационный измеритель (5), содержащий один или несколько расходомерных трубопроводов (103), один или несколько измерительных преобразователей (105, 105′), прикрепленных к одному или нескольким расходомерным трубопроводам (103), и привод (104), сконфигурированный для возбуждения колебаний одного или нескольких расходомерных трубопроводов (103), при этом вибрационный измеритель (5) характеризуется тем, что:
измерительная электроника (20) связана с одним или несколькими измерительными преобразователями (105, 105′) и с приводом (104), причем измерительная электроника (20) сконфигурирована для возбуждения колебаний одного или нескольких расходомерных трубопроводов (103) вибрационного измерителя (5) с использованием приводного сигнала, включающего в себя начальную частоту колебаний, и для приема сигнала измерительного преобразователя от одного или нескольких измерительных преобразователей (105, 105′) в ответ на это, итерационного смещения разности фаз между приводным сигналом и сигналом измерительного преобразователя на заданное приращение фазы и измерения результирующей частоты и амплитуды колебаний со смещением, эффективно свипирующим частоту колебаний по заданному частотному диапазону колебаний и формирующим множество амплитуд колебаний и соответствующее множество частот колебаний, и определения по существу отклика с максимальной амплитудой для множества амплитуд колебаний и обозначения соответствующей частоты колебаний как содержащей резонансную частоту,
при этом измерительная электроника (20) дополнительно сконфигурирована для измерения результирующей частоты колебаний и результирующей амплитуды колебаний после заданного установочного периода от смещения.
2. Вибрационный измеритель (5) по п. 1, в котором приводной сигнал включает в себя по существу постоянную амплитуду.
3. Вибрационный измеритель (5) по п. 1, в котором вибрационный измеритель (5) содержит вибрационный денситометр, вибрационный газовый денситометр или массовый расходомер Кориолиса.
4. Вибрационный измеритель (5) по п. 1, в котором измерительная электроника (20) дополнительно сконфигурирована для использования резонансной частоты для формирования одного или нескольких количественных определений текущего материала.
5. Вибрационный измеритель (5) по п. 1, причем заданный частотный диапазон колебаний выбирается так, чтобы включать в себя предполагаемую резонансную частоту.
6. Вибрационный измеритель (5) по п. 1, в котором измерительная электроника (20) дополнительно сконфигурирована для сужения заданного частотного диапазона колебаний до заданного суженного частотного диапазона после того, как резонансная частота найдена, причем смещение и определение повторяются, чтобы зафиксировать резонансную частоту в пределах заданного суженного частотного диапазона.
7. Вибрационный измеритель (5) по п. 1, в котором измерительная электроника (20) дополнительно сконфигурирована для сужения заданного частотного диапазона колебаний до заданного суженного частотного диапазона после того, как резонансная частота найдена, с заданным суженным частотным диапазоном, по существу сцентрированным на найденной резонансной частоте, и смещение и определение повторяются, чтобы зафиксировать резонансную частоту в пределах заданного суженного частотного диапазона.
8. Вибрационный измеритель (5) по п. 1, в котором измерительная электроника (20) дополнительно сконфигурирована для расширения заданного частотного диапазона колебаний до заданного расширенного частотного диапазона, если резонансная частота не найдена, причем смещение и определение повторяются, чтобы зафиксировать резонансную частоту в пределах заданного расширенного частотного диапазона.
9. Вибрационный измеритель (5) по п. 1, причем резонансная частота может быть определена для одного или обоих из конкретного вибрационного измерителя или конкретного текущего материала.
10. Способ определения резонансной частоты в вибрационном измерителе, причем способ содержит возбуждение колебаний одного или нескольких расходомерных трубопроводов вибрационного измерителя, используя приводной сигнал, включающий в себя начальную частоту колебаний, и прием сигнала измерительного преобразователя в ответ на это, причем способ характеризуется тем, что:
обеспечивают итерационное смещение разности фаз между приводным сигналом и сигналом измерительного преобразователя на заданное приращение фазы и измерение результирующей частоты и амплитуды колебаний со смещением, эффективно свипирующим частоту колебаний по заданному частотному диапазону колебаний и формирующим множество амплитуд колебаний и соответствующее множество частот колебаний; и
определение по существу отклика с максимальной амплитудой для множества амплитуд колебаний и обозначения соответствующей частоты колебаний как содержащей резонансную частоту,
причем способ дополнительно содержит измерение результирующей колебательной частоты и результирующей колебательной амплитуды после заданного установочного периода от смещения.
11. Способ по п. 10, в котором приводной сигнал включает в себя по существу постоянную амплитуду.
12. Способ по п. 10, в котором вибрационный измеритель содержит вибрационный денситометр, вибрационный газовый денситометр или массовый расходомер Кориолиса.
13. Способ по п. 10, который дополнительно содержит использование резонансной частоты для формирования одного или нескольких количественных определений текущего материала.
14. Способ по п. 10, в котором заданный частотный диапазон колебаний выбирается так, чтобы включать в себя предполагаемую резонансную частоту.
15. Способ по п. 10, в котором заданный частотный диапазон колебаний сужен до заданного суженного частотного диапазона после того, как резонансная частота найдена, причем смещение и определение повторяют, чтобы зафиксировать резонансную частоту в пределах заданного суженного частотного диапазона.
16. Способ по п. 10, в котором заданный частотный диапазон колебаний сужен до заданного суженного частотного диапазона после того, как резонансная частота найдена, причем заданный суженный частотный диапазон по существу сцентрирован на найденной резонансной частоте и причем смещение и определение повторяют, чтобы зафиксировать резонансную частоту в пределах заданного суженного частотного диапазона.
17. Способ по п. 10, в котором заданный частотный диапазон колебаний расширен до заданного расширенного частотного диапазона, если резонансная частота не найдена, причем смещение и определение повторяют, чтобы зафиксировать резонансную частоту в пределах заданного расширенного частотного диапазона.
18. Способ по п. 10, в котором резонансная частота может быть определена для одного или обоих из конкретного вибрационного измерителя или конкретного текущего материала.
| WO 2006104485 A1, 10.05.2006 | |||
| Сборная червячная фреза | 1985 |
|
SU1306659A1 |
| WO 9303336 A1, 18.02.1993 | |||
| US 5831178 A, 03.11.1998 | |||
| US4996871 A, 05.03.1991. | |||

