ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к области цифровой обработки сигналов.
Идентификация и отслеживание событий в цифровых сигналах всегда были очень важны в области техники цифровой обработки сигналов. Например, в сейсмической разведке большая часть информации, которую переносят сейсмические сигналы, в основном включена в события, так что идентификация и отслеживание событий в сейсмических сигналах тесно связаны с обработкой и интерпретацией сейсмической информации.
К настоящему времени разработано большое количество способов для идентификации событий цифрового сигнала, включая способ для автоматического отслеживания местоположения, способ анализа небольшой волны и морфологическая фильтрация СВ, способ для обнаружения события при использовании хаотических операторов, способ обнаружения краев, способ для идентификации событий при использовании искусственных нейронных сетей, способ для идентификации событий путем самоорганизации нейронных сетей, способ моделирования признаков сигналов, способ распознавания образов, алгоритм когерентности С3, алгоритм соответствия цепей, способ обнаружения края изображения и т.д.
Однако существующие способы для отслеживания событий цифрового сигнала не могут обеспечить желательный эффект идентификации, когда цифровые сигналы имеют низкое отношение сигнал-шум. Иными словами, когда цифровые сигналы, которые должны быть идентифицированы, имеют низкое отношение сигнал-шум, существующий способ для отслеживания события цифрового сигнала не может точно отличить эти события от шумов.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Настоящее изобретение обеспечивает новый способ и устройство для идентификации события (в частности, без ограничения, ось фазовой синхронизации) цифрового сигнала. Способ по настоящему изобретению идентифицирует события, основанные на кривой времени-расстояния с помощью фазовых характеристик сигнала с тем, чтобы они могли точно идентифицировать события, даже когда отношение сигнал-шум цифрового сигнала является низким, и могли обеспечить основу для последующей цифровой обработки и анализа сигналов.
Согласно одной цели настоящего изобретения обеспечивается способ для определения порога идентификации для идентификации события (такого, как, без ограничения, ось фазовой синхронизации) цифрового сигнала, содержащий стадии:
выполнение преобразования Гильберта на сейсмограмме случайного шумового сигнала;
извлечение сейсмограммы косинусной фазовой функции из сейсмограммы случайного шумового сигнала;
извлечение пороговой функции идентификации для событий из сейсмограммы косинусной фазовой функции, в которой переменный параметр идентификации пороговой функции составляет общее количество трасс прохождения сигнала (то есть ряд наложений).
Согласно другой цели настоящего изобретения обеспечивается способ для идентификации события цифрового сигнала, который содержит следующие стадии:
выполнение преобразования Гильберта на сейсмограмме случайного шумового сигнала;
вычисление сейсмограммы косинусной фазовой функции случайного шумового сигнала;
извлечение пороговой функции идентификации для событий из сейсмограммы косинусной фазовой функции, в которой переменный параметр идентификации пороговой функции составляет общее количество трасс прохождения сигнала;
создание сейсмограммы идентифицируемого цифрового сигнала;
в каждой точке дискретизации по времени значение функции, полученное горизонтальным наложением сейсмограмм косинусной фазовой функции на сейсмограмму введенных цифровых сигналов, сравнивается с идентификацией порогового значения функции, полученной, когда величина переменного параметра идентификации пороговой функции для событий является общим количеством трасс прохождения сигнала, содержащихся в сейсмограмме введенного цифрового сигнала;
точки дискретизации по времени указывают, когда значение функции, полученной горизонтальным наложением сейсмограмм косинусной фазовой функции на сейсмограмму введенного цифрового сигнала, больше, чем пороговое значение функции идентификации, идентифицированной как наличие событий.
Согласно еще одной цели настоящего изобретения обеспечивается способ для идентификации события цифрового сигнала, который содержит следующие стадии:
ввод сейсмограммы идентифицируемого цифрового сигнала;
выполнение преобразования Гильберта на сейсмограмме введенного цифрового сигнала;
извлечение сейсмограммы косинусной фазовой функции из сейсмограммы введенного цифрового сигнала;
горизонтальное наложение сейсмограмм косинусной фазовой функции на сейсмограмму трассы прохождения введенного цифрового сигнала, чтобы получить в каждой точке дискретизации по времени значение горизонтально наложенных сейсмограмм косинусной фазовой функции на сейсмограмме введенного цифрового сигнала;
значения функции, полученные в каждой точке дискретизации по времени, сравниваются со значением функции идентификации пороговой функции для событий, в которых получена пороговая функция идентификации событий горизонтальным наложением сейсмограмм косинусной фазовой функции, и переменный параметр идентификации пороговой функции является общим количеством трасс прохождения сигнала;
точки дискретизации по времени, в которых значение функции, полученное горизонтальным наложением сейсмограмм косинусной фазовой функции на сейсмограмму входного цифрового сигнала, больше значения функции идентификации для событий, идентифицируемых как события, имеющие место.
Согласно еще одной цели настоящего изобретения обеспечивается устройство для определения порога идентификации для идентификации событий цифрового сигнала, которое содержит:
узел для выполнения преобразования Гильберта на сейсмограмме случайного шумового сигнала;
узел для извлечения сейсмограммы косинусной фазовой функции из сейсмограммы случайного шумового сигнала; и
узел для извлечения пороговой функции идентификации для событий из сейсмограммы косинусной фазовой функции, в которой переменный параметр пороговой функции идентификации является общим количеством трасс прохождения сигнала.
Согласно еще одной цели настоящего изобретения обеспечивается система для идентификации событий цифрового сигнала, которая содержит:
узел для ввода сейсмограммы цифрового сигнала для его идентификации;
узел для выполнения преобразования Гильберта на сейсмограмме введенного цифрового сигнала;
узел для извлечения сейсмограммы косинусной фазовой функции из сейсмограммы введенного цифрового сигнала;
узел для горизонтального наложения сейсмограмм косинусной фазовой функции на сейсмограмму введенного цифрового сигнала для получения в каждой точке дискретизации по времени значения функции горизонтально наложенных сейсмограмм косинусной фазовой функции на сейсмограмме введенного цифрового сигнала;
узел для сравнения значений функции, полученных в каждой точке дискретизации по времени со значением пороговой функции идентификации для событий, в которых пороговая функция идентификации событий получена горизонтальным наложением сейсмограмм косинусной фазовой функции на сейсмограмму случайного шумового сигнала, и переменный параметр пороговой функции идентификации является общим количеством трасс прохождения сигнала;
узел для идентификации точек временной выборки, в которых значение функции, полученное горизонтальным наложением сейсмограмм косинусной фазовой функции на сейсмограмму идентифицируемого входного цифрового сигнала, имеют величину больше величины функции идентификации для событий, рассматриваемых как события, имеющие место.
Согласно еще одной цели настоящего изобретения обеспечивается машиночитаемый носитель ряда команд, который при их выполнении компьютером, инициируют компьютер выполнить способ, содержащий следующие стадии:
ввод сейсмограммы идентифицируемого цифрового сигнала;
выполнение преобразования Гильберта на сейсмограмме введенного цифрового сигнала;
извлечение сейсмограммы косинусной фазовой функции из сейсмограммы введенного цифрового сигнала;
горизонтальное наложение сейсмограмм косинусной фазовой функции на сейсмограмму введенного цифрового сигнала для получения в каждой точке дискретизации по времени значения функции горизонтально наложенных сейсмограмм косинусной фазовой функции на сейсмограмме введенного цифрового сигнала;
значения функции, полученные в каждой точке дискретизации по времени, сравниваются со значением пороговой функции идентификации для событий, в которых пороговая функция идентификации для событий получается путем горизонтального наложения сейсмограмм косинусной фазовой функции на сейсмограмму случайного шумового сигнала, и переменный параметр пороговой функции идентификации является общим количеством трасс прохождения сигнала;
точки дискретизации по времени, в которых значение функции, полученное горизонтальным наложением сейсмограмм косинусной фазовой функции на сейсмограмму введенного цифрового сигнала для его идентификации больше значения функции идентификации для событий, идентифицируемых как события, имеющие место.
Настоящее изобретение может найти широкое применение для точной идентификации и отслеживания цифровых сигналов в области цифровой обработки сигналов, такой как электронная обработка информации, обработка сигналов связи и обработка физических географических сигналов (в частности, обработка данных сейсмической разведки) и так далее.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сопроводительные чертежи иллюстрируют несколько примеров воплощения изобретения и вместе с описанием служат для объяснения принципов изобретения. Квалифицированные специалисты понимают, что конкретные примеры, показанные на чертежах, являются просто вариантами и не предназначены ограничить объем настоящего изобретения. Отметим, что в некоторых примерах один элемент может быть разработан как множество элементов или множество элементов может быть разработано как один элемент. В некоторых примерах элемент, показанный как внутренний компонент другого элемента, может быть выполнен как внешний компонент и наоборот. Примерные варианты настоящего изобретения будут описаны подробно со ссылками на приложенные чертежи с тем, чтобы аспекты, признаки и преимущества настоящего изобретения были лучше поняты при чтении описания.
На чертежах:
Фигура 1А - блок-схема примерного способа для определения порога идентификации для идентификации событий цифрового сигнала согласно настоящему изобретению;
Фигура 1В - блок-схема примерного способа для идентификации событий цифрового сигнала (например, без ограничения) цифрового сигнала с низким отношением сигнал-шум) согласно настоящему изобретению;
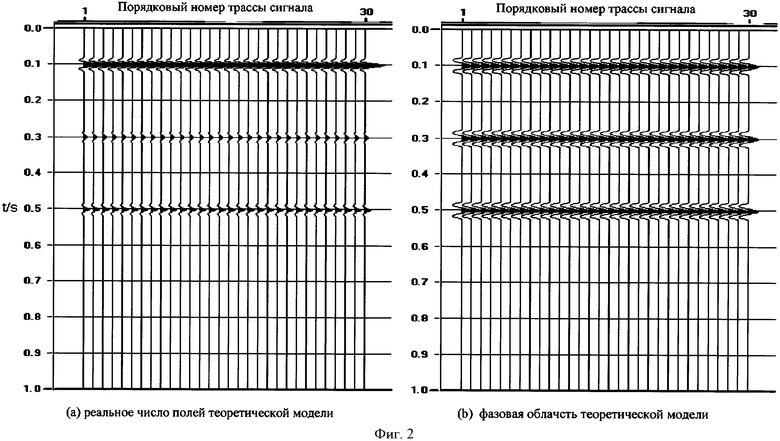
Фигура 2 - принципиальная схема, иллюстрирующая контраст между реальным полем теоретической модели и фазовым полем теоретической модели;
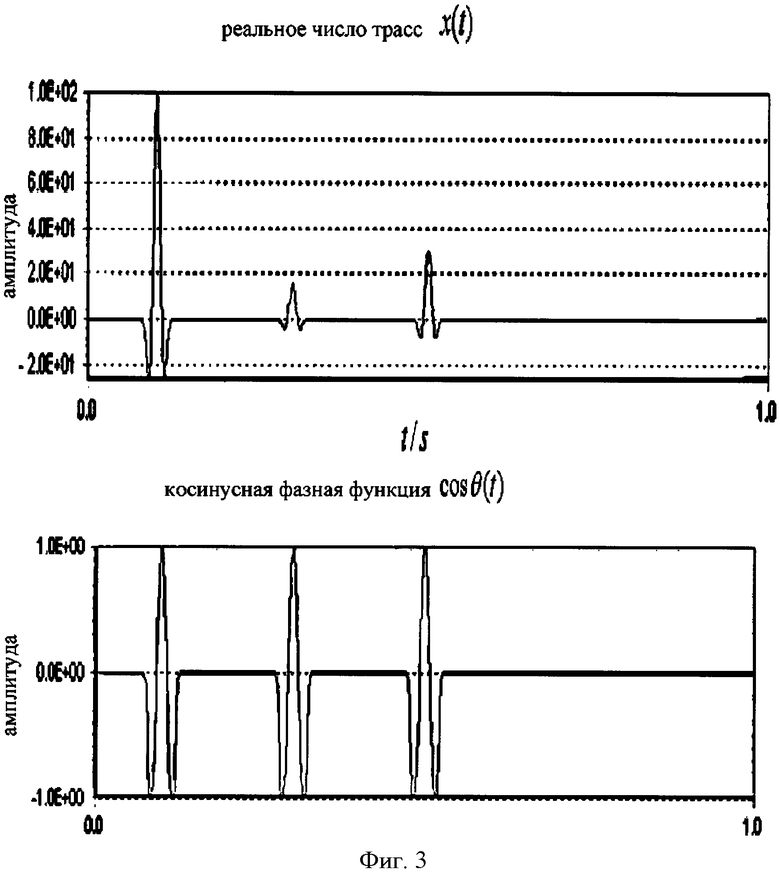
Фигура 3 - принципиальная схема, иллюстрирующая контраст между реальным полем теоретической модели для единственной трассы и фазовым полем теоретической модели для единственной трассы;
Фигура 4 - принципиальная схема, иллюстрирующая ось сложенного значения гребня волны;
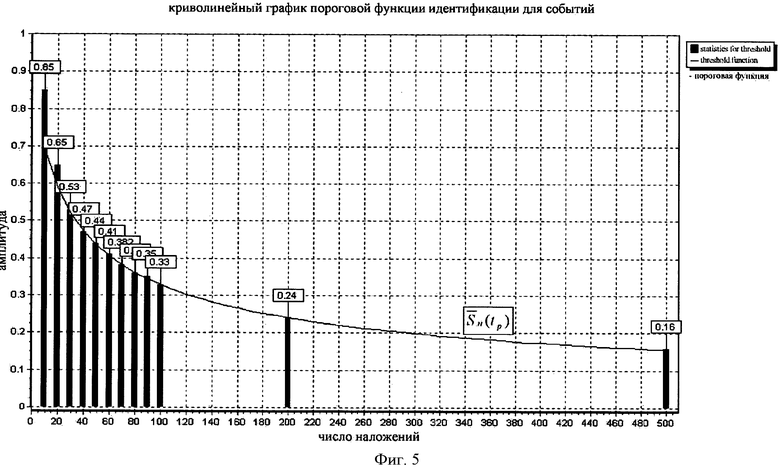
Фигура 5 - принципиальная схема, иллюстрирующая статистику пороговых значений для идентификации событий цифрового сигнала (например, без ограничения, цифрового сигнала с низким отношением сигнал-шум) согласно настоящему изобретению;
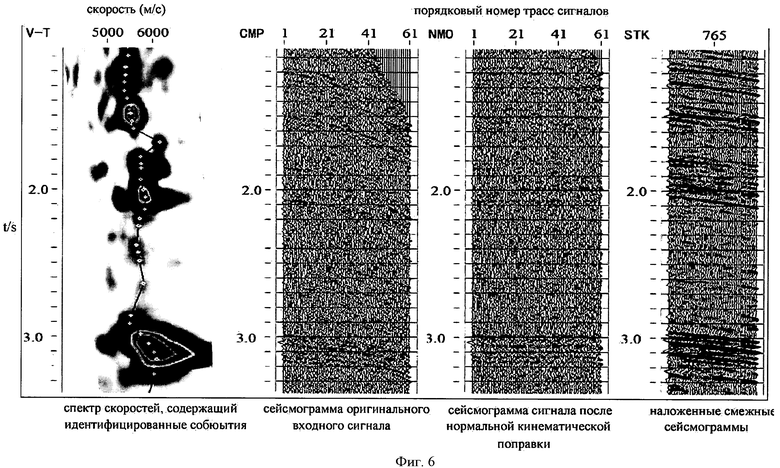
Фигура 6 - принципиальная схема, иллюстрирующая спектр скоростей сейсмограммы введенного цифрового сигнала (в котором события, идентифицированные способом согласно настоящему изобретению, показаны в спектре скоростей), а также временные сейсмические разрезы введенного цифрового сигнала, сейсмограмма нормального корректированного выходного сигнала и смежные сейсмограммы, которые сложены горизонтально;
Фигура 7А - блок-схема устройства для определения порога идентификации для идентификации событий цифрового сигнала согласно настоящему изобретению;
Фигура 7В - блок-схема примерной системы для идентификации событий цифрового сигнала (например, без ограничения, цифрового сигнала с низким отношением сигнал-шум) согласно настоящему изобретению.
ПОДРОБНОЕ ОПИСАНИЕ
В документах заявки некоторые термины используются для обозначения определенных компонентов системы. Специалистам в данной области понятно, что для обозначения одного и того же компонента могут использоваться различные обозначения, таким образом, документ заявки не намерен различать эти компоненты, которые отличаются только названием, а не функциями. В документе заявки термины "содержат", "включают" и "имеют" используются открытым способом и, таким образом, они должны толковаться в смысле "содержит", но не ограничены этим. Кроме того, термины "в основном", "по существу" или "приблизительно", которые могут использоваться здесь, относятся к принятому в области техники допуску по соответствующему термину. Термин "соединенный", как он может использоваться здесь, включает прямое соединение и косвенную связь через другой компонент, элемент, схему или узел, где косвенная связь указанного компонента, элемента, схемы или узла не изменяет информацию сигнала, но может корректировать его текущий уровень, уровень напряжения и/или уровень мощности. Полученная связь, например, имеет место там, где один элемент связан с другим элементом выводом, и включает прямую и косвенную связь между двумя элементами тем же самым способом, как и понятием "соединено".
В последующем описании, с целью объяснения сформулированы различные конкретные подробные данные, чтобы обеспечить полное понимание изобретения. Однако для специалистов в данной области, очевидно, что устройство, способ и система настоящего изобретения могут быть выполнены без этих подробных данных. Ссылка на "вариант воплощения", "пример" или тому подобное выражение в описании означает, что определенные признаки, структуры или характеристики, описанные в связи с вариантом воплощения или примером, содержатся, по меньшей мере, в одном указанном варианте воплощения или примере, но не обязательно содержатся в других вариантах воплощения или примерах. Различные типы фраз "в варианте воплощения", "в предпочтительном варианте воплощения" или тому подобном выражении в различных частях описания не обязательно все относится к тому же самому варианту воплощения.
Чтобы облегчить полное понимание технического решения по настоящему изобретению, некоторые характеристики событий в сигналах с низким отношением сигнал-шум будут кратко представлены здесь сейсмическими сигналами в качестве примера. Однако упомянутые здесь сейсмические сигналы являются только примерами для иллюстрации технического решения по настоящему изобретению, и они не ограничивают объем настоящего изобретения.
Во время сейсмической разведки, когда поверхностные и подземные геологические структуры являются сложными, полученные сейсмические сигналы будут иметь низкое отношение сигнал-шум. При таких обстоятельствах многие сейсмические сигналы заглушаются шумами, и события сейсмических сигналов почти невидимы на сейсмическом профиле, или только некоторые из событий видимы, но не отчетливо. Далее, события (такие как, без ограничения, ось фазовой синхронизации) кажутся скрученными, непропорциональными, несовпадающими по фазе (не находящимися в фазе), энергия сигнала переходит от трассы к трасс, слабые сигналы невидимы на сейсмограмме невооруженным глазом и так далее.
Как упомянуто выше, в данной области техники имеется много способов идентификации событий, но до сих пор в большинстве случаев не использовался способ идентификации событий сигналов с низким отношением сигнал-шум. Изобретатель настоящего изобретения обнаружил, что события зависят, главным образом, от фазы сигнала, и это является ключевым пунктом.
В цифровых сигналах с низким отношением сигнал-шум сигналы можно рассматривать либо как случайные шумы, либо как события. Иными словами, верхний порог идентификации для случайных шумов нужно рассмотреть как нижний порог идентификации для событий цифрового сигнала. Поэтому, если может быть получен верхний порог идентификации для случайных шумов, события сигналов с низким отношением сигнал-шум могут быть идентифицированы и прослежены.
Кроме того, хотя есть бесконечные виды случайных шумов, синтез трасс случайных шумов намного проще, чем синтез сейсмограммы сигналов с низким отношением сигнал-шум. Таким образом, новая идея, раскрытая в настоящем изобретении, является действующей и практически применимой.
Настоящее изобретение будет далее описано более подробно со ссылками на приложенные чертежи.
На фигуре 1А настоящего изобретения показана блок-схема примерного способа для определения порога идентификации для идентификации событий цифрового сигнала по настоящему изобретению. На фигуре 1В показана блок-схема примерного способа для идентификации событий цифрового сигнала (например, без ограничения, цифрового сигнала с низким отношением сигнал-шум) по настоящему изобретению.
Вообще говоря, примерный способ для идентификации событий по настоящему изобретению включает, главным образом, идентификацию событий (таких, как, без ограничения, ось фазовой синхронизации) цифрового сигнала с низким отношением сигнал-шум, основанным на известной кривой времени-расстояния в фазовом домене с помощью характеристики, доказывающей, что события цифрового сигнала (например, без ограничения, сейсмограмма сейсмического сигнала данных) в основном зависят от фазы сигнала.
Упомянутая здесь кривая времени-расстояния или кривая пробега сейсмоволн относится к кривой отношения между временем прохождения сейсмической волны и расстоянием, а именно к кривой отношения между временем, в которое сейсмическая волна достигает каждого из зондов демодулятора и расстояния от зондов демодулятора до точек выстрела.
Как это может быть понято специалистами в данной области, один важный аспект настоящего изобретения состоит в получении пороговой функции идентификации для событий (таких, как, без ограничения, ось фазовой синхронизации), которая в основном содержит: выполнение преобразования Гильберта на сейсмограмме случайного шума (содержащей только случайный шум), чтобы получить сейсмограмму косинусной фазовой функции из сейсмограммы случайного шума; затем выполняется горизонтальное наложение сейсмограммы косинусной фазовой функции (то есть горизонтальное наложение всех трасс сигнала в одну трассу прохождения сигнала) согласно характеристикам, что фазовая функция отражает только фазу и частоту сигнала и не имеет отношения к амплитуде сигнала и что диапазон амплитуды [-1, 1] для получения отношения между максимумом пика волны сигнала и рядом наложений (т.е. общим количеством трасс прохождения сигнала), и таким образом обеспечивается получение статистически верхнего порога функции идентификации для случайного шума (т.е. пороговой функции идентификации для событий), которая меняется в зависимости от числа наложений.
Пороговая функция идентификации для событий по настоящему изобретению обеспечивается в виде эмпирической формулы. Такая эмпирическая формула может использоваться непосредственно.
Как показано на фигуре. 1А, на стадии 101 выполняется преобразование Гилберта на сейсмограмме случайного шумового сигнала xi(t) для получения преобразованной по Гилберту величины h1(t), при этом указанное преобразование Гилберта представлено в виде уравнения:
где t - время, i - порядковый номер трасс прохождения сигнала и τ - точка дискретизации в каждой трассе прохождения сигнала.
На стадии 102 выводится сейсмограмма косинусной фазовой функции cosi(t) сейсмограммы случайного шумового сигнала xi(t), при этом указанная сейсмограмма косинусной фазовой функции может быть получена следующим образом:
во-первых, вывод мгновенной оболочки сейсмограммы случайного шумового сигнала xi(t), причем указанная мгновенная оболочка выражается как:

во-вторых, вывод мгновенной фазы из мгновенной оболочки, при этом указанная мгновенная фаза выражается как:
получая таким образом сейсмограмму косинусной фазовой функции:
откуда

Из уравнения (5) можно видеть, что выражение xi(t) может быть разложено на косинусную фазовую функцию cosθi(t) и мгновенную оболочку ai(t).
Из уравнения (4) следует, что косинусная фазовая функция cosθi(t) отражает только фазу и частоту сигнала и его динамический диапазон [-1, 1]. Как показано на фигуре 2, иллюстрирующей поперечное сечение трассы прохождения сигнала, и на Фигуре 3, иллюстрирующей одиночную трассу прохождения сигнала, косинусная фазовая функция сигнала относится только к фазе и частоте сигнала, в то время как амплитуды находятся в пределах диапазона [-1, 1].
На стадии 103 полученные сейсмограммы косинусной фазовой функции накладываются горизонтально согласно характеристикам, показанным на фигуре 3, при этом косинусная фазовая функция отражает только фазу и частоту сигнала и не отражает амплитуду сигнала и динамический диапазон [-1, 1], так что для получения Sn (t) используется уравнение:
В уравнении (6) n представляет число наложений (т.е. общее количество трасс прохождения сигнала), i представляет порядковый номер трассы прохождения сигнала и t представляет время.
На стадии 104 получение статистического отношения между максимумом Sn (t) и количеством наложений (т.е. общим количеством трасс прохождения сигнала) и получение эмпирической формулы (например, по уравнению (8), описанному ниже) порога функции идентификации для событий, которые изменяются в зависимости от общего количества трасс прохождения сигнала.
Примерная эмпирическая формула пороговой функции идентификации для событий (таких, как, без ограничения, ось фазовой синхронизации) по настоящему изобретению может быть получена следующим образом:
Предположим, что tp является временем, в котором происходит пик волны сигнала, затем идеальные события могут быть определены как:
Здесь определенное значение идеальных событий представляет собой верхний порог идентификации для событий. Как показано на фигуре 4, имеются три точки на оси наложенных гребней волн, среди которых два были выведены, т.е. нижний порог случайного шума и верхний порог событий, в то время как другая точка, которая является самой важной, является нижним порогом для событий сигнала (например, сигнала с низким отношением сигнал-шум), в котором нижний порог для событий сигнала также вызывается "порогом идентификации для идентификации событий").
Предположим, что 
Фигура 5 - принципиальная схема, иллюстрирующая статистику пороговой функции идентификации 
Таким образом, примерная эмпирическая формула пороговой функции идентификации для событий, которые изменяются в зависимости от числа наложений, может быть получена следующим образом:
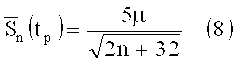
где n представляет число наложений (т.е. общее количество трасс прохождения сигнала), µ представляет поправочный коэффициент, предпочтительно 0.5≤µ1.0 и более предпочтительно µ=0,618.
Когда заданы n и µ,
Следует отметить, что указанная эмпирическая формула является просто одним из примеров в настоящем изобретении и объем настоящей заявки не ограничен этим примером. Другая эмпирическая формула пороговой функции идентификации для событий, которые изменяются в зависимости от числа наложений, может быть получена специалистами в данной области статистически, не выходя из духа и объема настоящего изобретения, кроме того, такие дополнительно измененные эмпирические формулы также находятся в пределах объема настоящей заявки.
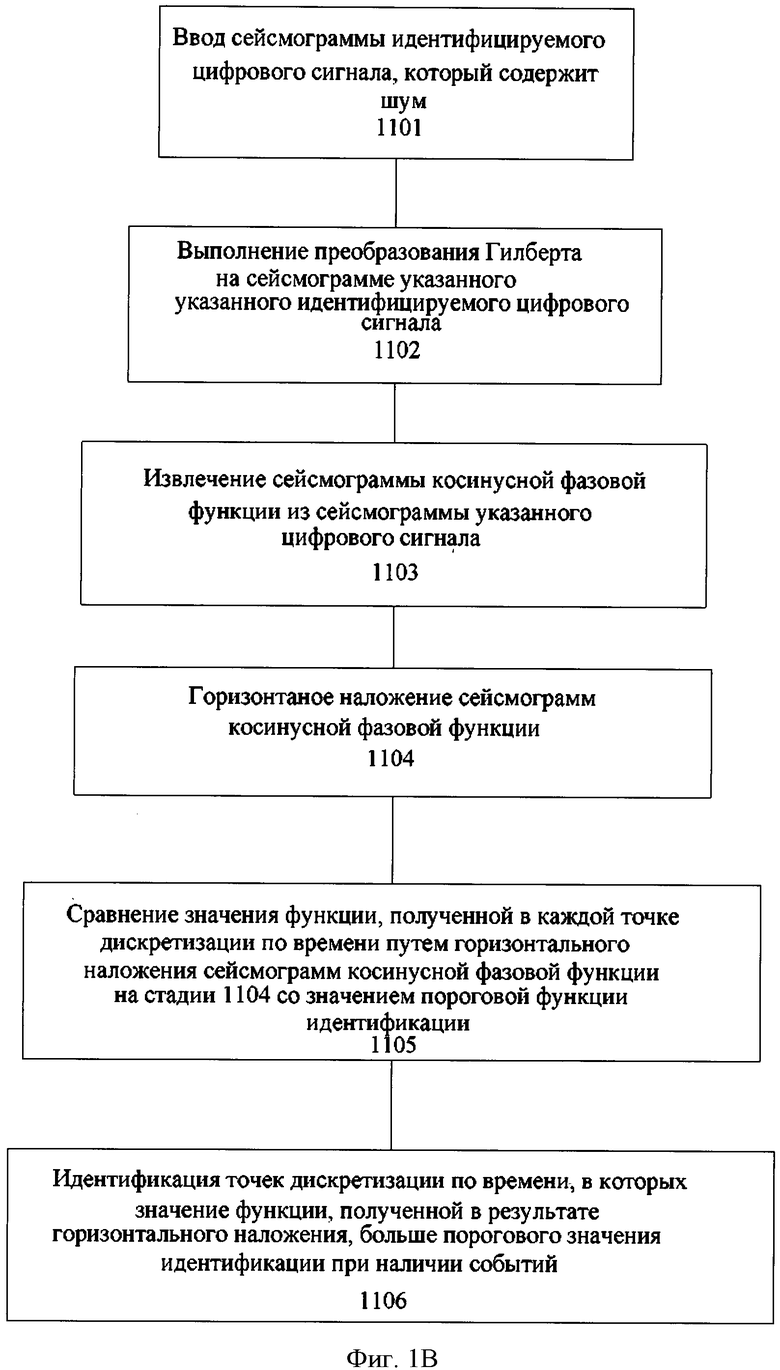
Ниже описывается примерный способ для идентификации событий введенного цифрового сигнала, который подлежит идентификации (например, без ограничения, цифровой сигнал с низким отношением сигнал-шум), используя вышеупомянутую пороговую функцию идентификации для идентификации событий со ссылкой на фигуру 1В.
Как показано на фигуре 1В на стадии 1101, создается сейсмограмма идентифицируемого входного цифрового сигнала, содержащего шум.
На стадии 1102 выполняется преобразование Гильберта на сейсмограмме указанного входного цифрового сигнала для его идентификации согласно вышеупомянутому уравнению (1).
На стадии 1103 вычисляется сейсмограмма косинусной фазовой функции из сейсмограммы указанного входного цифрового сигнала для его идентификации согласно вышеупомянутым уравнениям (2), (3) и (4).
На стадии 1104 сейсмограммы косинусной фазовой функции и сейсмограмма указанного входного цифрового сигнала накладываются горизонтально (т.е. осуществляется горизонтальное наложение всех трасс прохождения сигнала в одну трассу) для получения в каждой точке дискретизации по времени значения функции горизонтально наложенных сейсмограмм косинусной фазовой функции входного цифрового сигнала.
На стадии 1105 в каждой точке дискретизации по времени значение функции, полученное горизонтальным наложением сейсмограмм косинусной фазовой функции на сейсмограмму входного цифрового сигнала, по сравнению с пороговым значением функции идентификации, полученным, когда величина переменного параметра n пороговой функции идентификации для событий установлена как общее количество трасс прохождения сигнала, содержащихся на сейсмограмме входного цифрового сигнала. Например, если общее количество трасс прохождения сигнала, содержащихся на сейсмограмме входного цифрового сигнала, извлеченного для его идентификации, равно 30, переменный параметр n указанной пороговой функции идентификации
На стадии 1106 точки дискретизации по времени, в которых значение функции, полученное горизонтальным наложением сейсмограмм косинусной фазовой функции на сейсмограмму входного цифрового сигнала для его идентификации, больше значения функции идентификации для событий, идентифицируемых как события, имеющие место; в противном случае рассматриваемая точка дискретизации по времени идентифицируется как шум.
На фигуре 6 представлена принципиальная схема, иллюстрирующая спектр скоростей сейсмограммы входного цифрового сигнала, как реальная сейсмограмма сигнала СМР (в котором события, идентифицированные по способу настоящего изобретения, показаны в спектре скоростей) и также показан временной сейсмический разрез входного цифрового сигнала, нормального откорректированного выходного сигнала и смежных сейсмограмм, наложенных горизонтально. Из некоторых областей поперечного разреза на фигуре 6 можно видеть, что результат идентификации событий является корректным.
Дополнительно примерная система для идентификации событий цифрового сигнала по настоящему изобретению будет описана ниже более подробно.
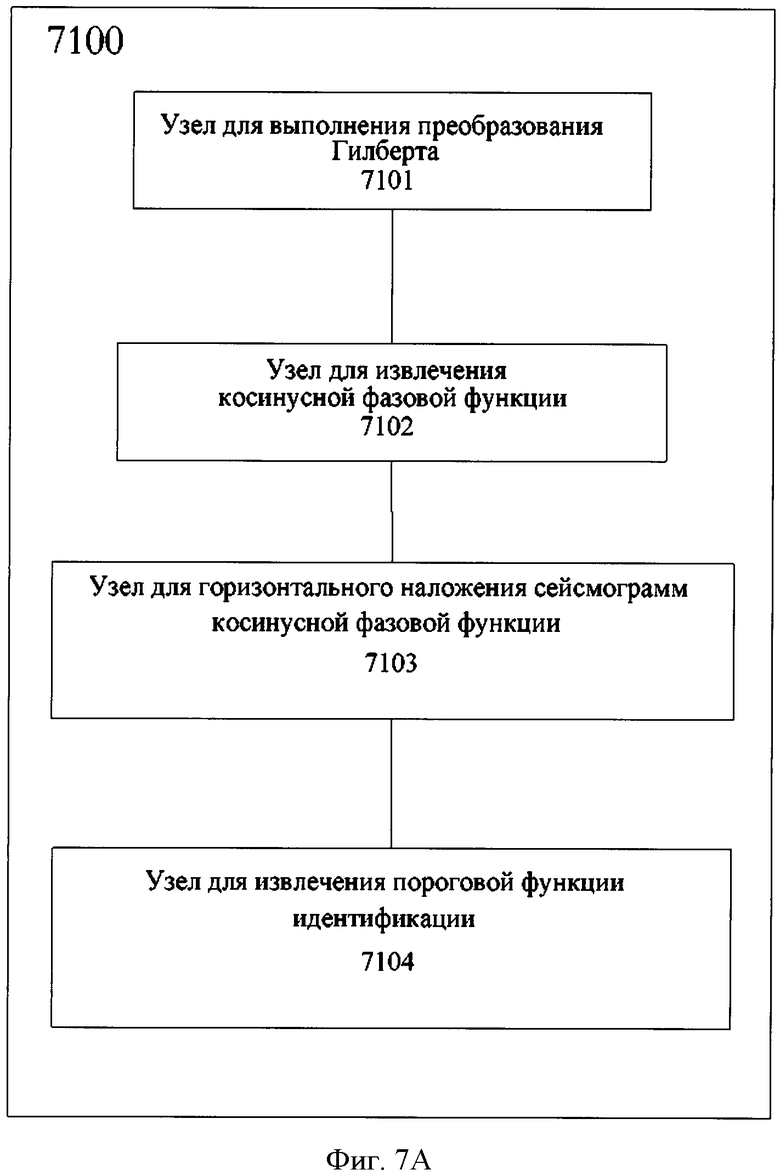
На фигуре 7А представлена блок-схема устройства для определения порога идентификации для идентификации событий цифрового сигнала согласно настоящему изобретению.
Как показано на фигуре 7А, устройство 7100 для определения порога идентификации событий цифрового сигнала содержит, без ограничения, узел 7101 для выполнения преобразования Гильберта, узел 7102 для получения косинусной фазовой функции, узел 7103 для горизонтального наложения сейсмограмм косинусной фазовой функции и узел 7104 для получения пороговой функции идентификации событий.
Узел 7101 для выполнения преобразования Гилберта предназначен для выполнения преобразования Гилберта на сейсмограмме случайного шумового сигнала.
Узел 7102 связан с узлом 7101 и используется для вычисления сейсмограммы косинусной фазовой функции по трассе прохождения случайного шумового сигнала.
Узел 7103 горизонтально накладывает сейсмограммы косинусной фазовой функции, полученные узлом 7102 по характеристикам, показанным на фигуре 3, в которых косинусная фазовая функция только отражает фазу и частоту сигнала и не учитывает амплитуду сигнала и динамический диапазон [-1, 1] для получения Sn (t) с помощью приведенного выше уравнения (6).
Узел 7104 сконфигурирован для получения статистическим способом отношения между максимумом Sn (t) и количеством наложений и для получения пороговой функции идентификации для событий, которые изменяются в зависимости от числа наложений (например, по уравнению (8), приведенному выше).
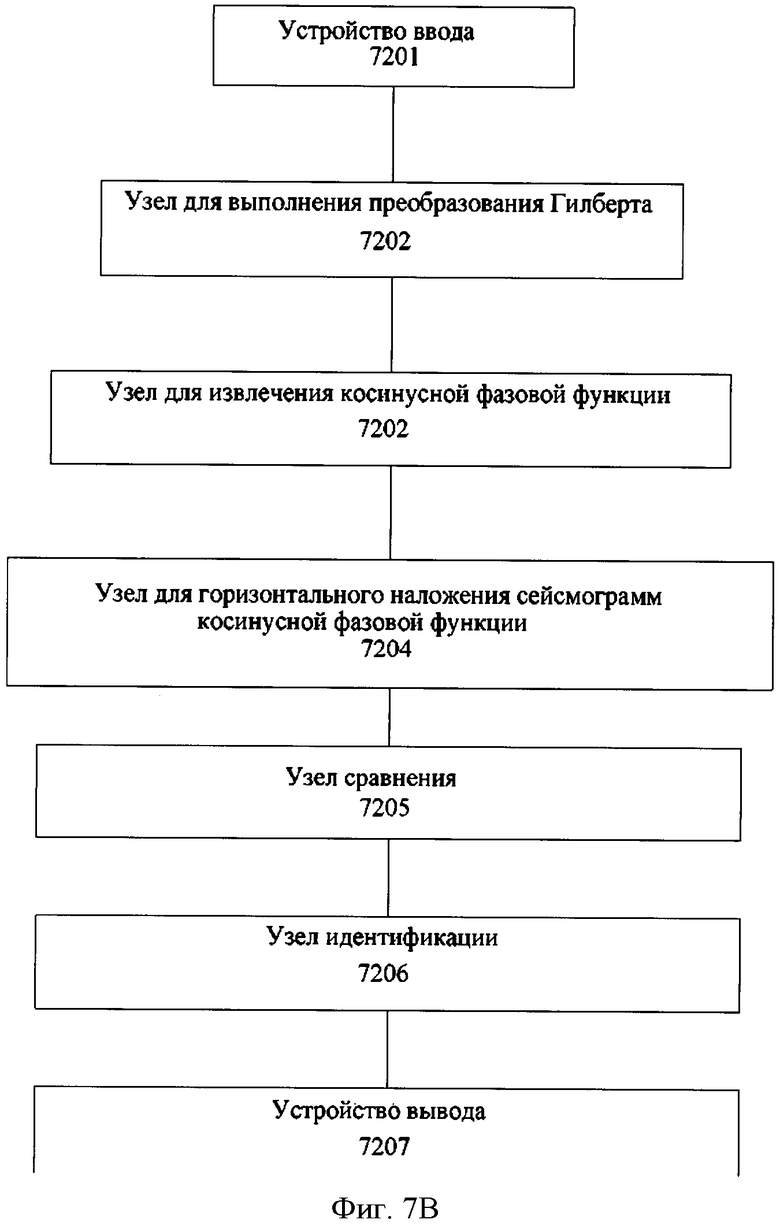
Фигура 7В - блок-схема примерной системы для идентификации событий цифрового сигнала (такого, как, без ограничения, цифровой сигнал с низким отношением сигнал-шум) по настоящему изобретению.
Как показано на фигуре 7В, система содержит, без ограничения, устройство ввода 7201, узел 7202 для выполнения преобразования Гилберта, узел 7203 для получения косинусной фазовой функции, узел 7204 для горизонтального наложения сейсмограмм косинусной фазовой функции, узел сравнения 7205, узел идентификации 7206 и устройство вывода 7207.
Устройство ввода 7201 предназначено для ввода сейсмограммы идентифицируемого входного сигнала и этот сигнал содержит шум.
Узел 7202 предназначен для выполнения преобразования Гилберта на сейсмограмме входного сигнала по вышеупомянутому уравнению (1).
Узел 7203 связан с узлом 7202 и используется для вычисления сейсмограммы косинусной фазовой функции указанного входного цифрового сигнала согласно вышеупомянутым уравнениям (2), (3) и (4).
Узел 7204 связан с узлом 7203 и используется для горизонтального наложения сейсмограммы косинусной фазовой функции указанного входного цифрового сигнала (т.е. горизонтальное наложение всех трасс в одну трассу) для получения в каждой точке дискретизации по времени значения функции горизонтально наложенных сейсмограмм косинусной фазовой функции сейсмограммы входного цифрового сигнала.
Узел сравнения связан с узлом 7204 и с устройством 7100, как показано на фигуре 7А, и предназначен для сравнения в каждой точке дискретизации по времени значения функции, полученной горизонтальным наложением сейсмограмм косинусной фазовой функции на сейсмограмму входного цифрового сигнала с идентификацией значения пороговой функции, полученной, когда величина переменного параметра n пороговой функции идентификации для событий установлена как общая величина трасс прохождения сигнала, на сейсмограмме идентифицируемого входного цифрового сигнала.
Узел идентификации 7206 используется для идентификации точек дискретизации по времени, в которых значение функции, полученное горизонтальным наложением сейсмограмм косинусной фазовой функции на сейсмограмму входного цифрового сигнала для его идентификации, имеет величину больше величины функции идентификации для имеющих место событий; в противном случае рассматриваемая точка дискретизации по времени идентифицируется как точка, содержащая шум.
Устройство вывода 7207 выводит результат идентификации. Указанное устройство вывода 7207 содержит, без ограничения, дисплей, голосовое устройство вывода, такое как громкоговоритель или иной тип устройства вывода, которое позволяет пользователю изучить результат идентификации.
Кроме того, также следует отметить, что вышеупомянутые примеры в настоящем изобретении относятся только к идентификации горизонтальных событий. Если события не являются горизонтальными, горизонтальные события могут быть получены с помощью уравнения времени-расстояния и затем идентификация событий выполняется согласно вышеописанному способу.
Настоящее изобретение было описано с определенными подробностями относительно одного возможного варианта воплощения. Специалисты в данной области понимают, что изобретение может быть осуществлено в других вариантах воплощения. Предпочтительные примеры изобретения могут быть выполнены в любой комбинации аппаратных средств, программного обеспечения и встроенного микропрограммного обеспечения. В различных примерах компоненты устройства выполнены программным обеспечением или встроенным микропрограммным обеспечением, хранящимся в памяти и выполняемом соответствующей системой выполнения команд. Устройство может быть выполнено в виде аппаратных средств. Например, в некоторых вариантах воплощения компоненты устройства могут быть выполнены любым одним способом или комбинацией следующих способов, известных специалистам: дискретная логическая схема (схемы), имеющая логический элемент для выполнения логической функции на сигналах данных, специализированная интегральная схема (ASIC), содержащая соответствующий комбинированный логический элемент, программируемая матрица логических элементов (PGA), программируемая пользователем матрица логических элементов (FPGA) и так далее. Кроме того, конкретное разделение функциональности между описанными здесь различными системными компонентами является просто примерным и необязательным; функции, выполняемые единственным системным компонентом, могут вместо этого быть выполнены множеством компонентов, а функции, выполняемые множеством компонентов, могут вместо этого быть выполнены единственным компонентом.
Компоненты программного обеспечения могут включать упорядоченный список исполняемых команд для выполнения логической функции, которые могут быть записаны на любом машиночитаемом носителе, используемом либо в соединении с системой выполнения команд, либо одним устройством. Указанная система выполнения команд, аппарат или устройство, например компьютерная система, система, содержащая процессор, или другая система, которая может получать команды из системы выполнения команд, аппарата или устройства и может выполнять указанные команды. Кроме того, объем настоящего изобретения включает функцию реализации одного или нескольких вариантов воплощения в логике, воплощенной в носителе, состоящем из аппаратных средств или программного обеспечения.
Варианты воплощения настоящего изобретения были раскрыты с целью его иллюстрации. Они не являются исчерпывающими или ограничивающими настоящее изобретение раскрытыми точными формами. Согласно вышеописанному изобретению для специалистов в данной области очевидны различные изменения и модификации описанных здесь вариантов воплощения. Отметим, что вышеупомянутые примеры не являются ограничивающими. Другие варианты воплощения способов, аппаратов и устройств, содержащих многие из вышеупомянутых признаков, могут быть введены дополнительно. Другие аппараты, способы, устройства, признаки и преимущества настоящего изобретения еще более очевидны для специалистов в данной области после прочтения подробного описания и изучения сопроводительных чертежей. Предполагается, что все такие другие аппараты, способы, устройства, признаки и преимущества включены в объем защиты изобретения.
Если не указано иначе, условные выражения типа "в состоянии", "могут", "возможно", "может" и т.д. обычно указывают на то, что некоторые варианты воплощения могут, но не обязательно, содержать некоторые признаки, элементы и/или стадии. Поэтому такие условные выражения обычно не содержат требования, чтобы один или несколько вариантов воплощения содержали эти признаки, элементы и/или стадии.
Иллюстративные блок-схемы и технологические схемы изображают этапы процесса или блоки, которые могут представлять собой модули, сегменты или части кода, которые включают один или несколько команд для выполнения определенных логических функций или стадий процесса. Хотя определенные примеры иллюстрируют определенные этапы процесса или действия, возможны альтернативные реализации, обычно осуществляемые простым проектным решением. Действия и стадии процесса могут быть выполнены в различном порядке в зависимости от определенного описания, основанного на соображениях функциональности, цели, соответствия стандартам, прежней структуре и т.д.
Некоторые части вышеупомянутого представлены с точки зрения алгоритмов и символьных представлений операций на битах данных в памяти компьютера. Эти алгоритмические описания и представления являются средствами, используемыми специалистами по обработке данных, чтобы наиболее эффективно передать сущность их работы другим квалифицированным специалистам. Здесь есть алгоритм, который является последовательностью стадий (команд), приводящих к желательному результату. Стадии - это те операции, которые требуют физических манипуляций физическими количествами. Как правило, хотя не обязательно, эти количества принимают форму электрических, магнитных или оптических сигналов, предназначенных для хранения данных, объединения, сравнения или иным образом управляемых процессов. По времени и по причинам общего пользования удобно именовать эти сигналы как биты, значения, элементы, буквы, символы, термины, числа и т.д. Кроме того, также удобно время от времени обращаться к некоторым стадиям, требующим физических манипуляций физическими объектами, такими как модули или кодирующие устройства в рамках общего направления.
Однако следует принять во внимание то, что все эти и подобные термины должны быть связаны с соответствующими физическими объектами и являются просто удобными метками, применяемыми к этим объектам. Если конкретно не утверждено иначе, как очевидное из следующего обсуждения, следует понимать, что везде по описанию используются термины, такие как "обработка" или "вычисление", или "отображение", или "определение" и т.д., которые относятся к действию и процессам компьютерной системы или тому подобному электронному вычислительному модулю и/или устройству, которое управляет и преобразует данные, представленные как физические (электронные) количества в памяти компьютерной системы или регистров или другого такого хранилища информации или устройства для передачи данных или изображений.
Настоящее изобретение также относится к устройству для выполнения операций. Это устройство может быть создано в определенных целях или оно может содержать компьютер общего назначения, выборочно активируемый или реконфигурируемый компьютерной программой, хранящейся в памяти компьютера. Такая компьютерная программа может храниться в компьютере на машиночитаемом носителе, таком как диск, включая гибкие диски, оптические диски, CD-ROM, магнитные оптические диски, постоянную память (ROM), оперативную память (RAM), EPROM, EEPROM, магнитные или оптические карты, специализированные интегральные схемы (ASIC) или некий тип носителей, подходящих для хранения электронных команд, и каждое из таких устройств связано с шиной компьютерной системы. Дополнительно, упомянутые здесь компьютеры могут включать один процессор или могут быть архитектурой, использующей множество процессоров для увеличения производительности компьютера.
Представленные здесь алгоритмы и устройства отображения, по сути, не относятся ни к одному определенному компьютеру, виртуальной системе или другому устройству. Различные системы общего назначения могут также использоваться с описанными здесь программами в соответствии с описанием или может оказаться удобным создать более специализированное устройство для выполнения необходимых стадий способа. Необходимая структура для многих таких систем будет очевидна из вышеприведенного описания. Кроме того, настоящее изобретение не основано на каком-либо конкретном языке программирования. Предполагается, что для выполнения описанного здесь изобретения может использоваться множество языков программирования и любые приведенные выше ссылки на определенные выражения служат для реализации возможностей и наилучшего режима для настоящего изобретения.
Хотя изобретение было описано на примере ограниченного количества вариантов воплощения, после чтения вышеупомянутого описания специалистам в данной области будет понятно, что могут быть разработаны другие варианты воплощения, которые не выходят из объема настоящего изобретения. Кроме того, следует отметить то, что язык, используемый в описании, в основном был выбран для удобочитаемости и учебных целей и не мог быть выбран для формирования изображений или для ограничения предмета изобретения. Соответственно, описание настоящего изобретение является иллюстративным и неограничивающим объем изобретения, который сформулирован в формуле изобретения.

Изобретение относится к области геофизики и может быть использовано для обработки сейсмических данных. Предложен способ идентификации события цифрового сигнала с помощью характеристики, указывающей, что события цифрового сигнала в основном зависят от фазы сигнала. Заявленное решение предусматривает выполнение преобразования Гильберта на сейсмограммы случайного шумового сигнала, вывод сейсмограммы косинусной фазовой функции из сейсмограммы случайного шумового сигнала, а также вывод пороговой функции идентификации для событий из сейсмограммы косинусной фазовой функции, включающей горизонтальное наложение сейсмограмм косинусной фазовой функции. Причем переменный параметр пороговой функции идентификации является общим количеством трасс прохождения сигнала. Также представлены система для осуществления указанного выше способа идентификации событий и машиночитаемый носитель данных. Технический результат - повышение точности получаемых данных. 4 н. и 13 з.п. ф-лы, 9 ил.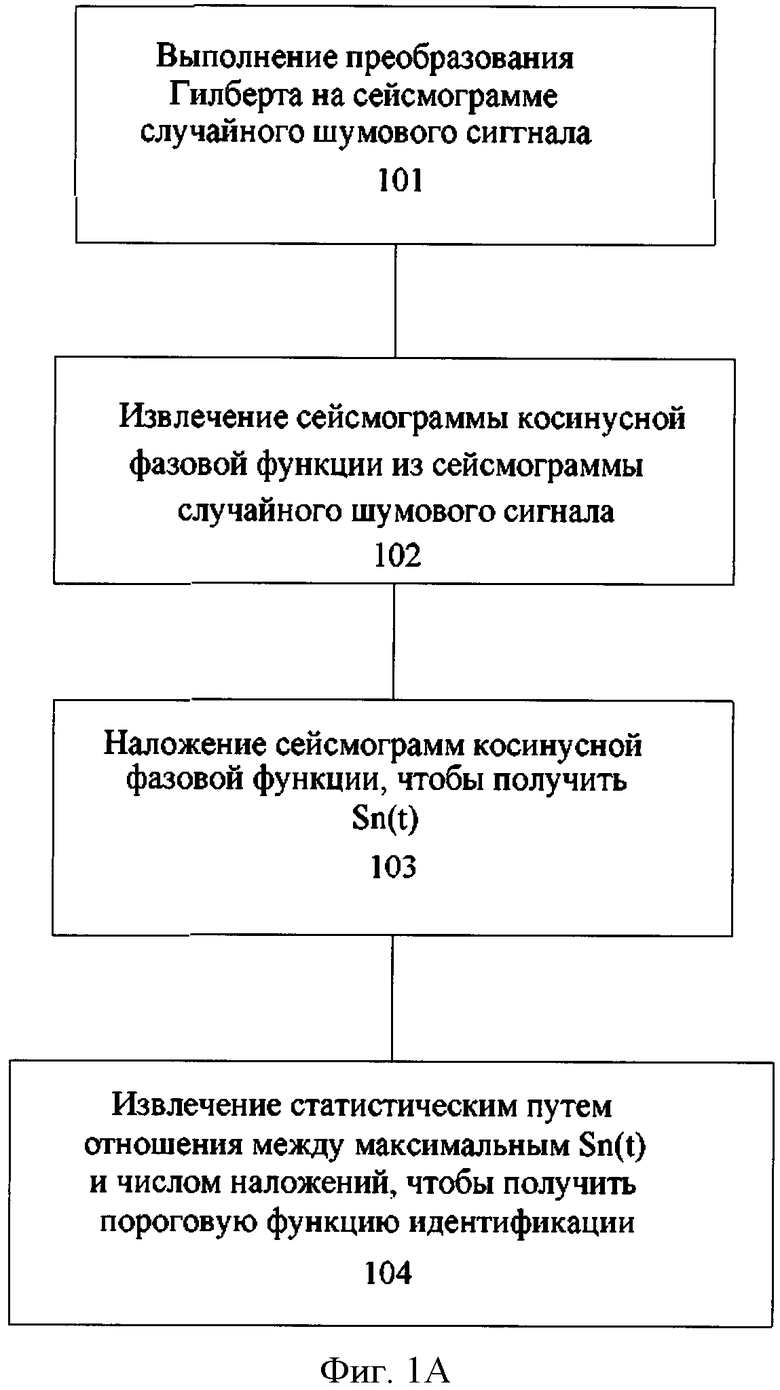
1. Способ для определения порога идентификации для идентификации событий цифрового сигнала, содержащий:
выполнение преобразования Гильберта на сейсмограммы случайного шумового сигнала;
вывод сейсмограммы косинусной фазовой функции из сейсмограммы случайного шумового сигнала;
вывод пороговой функции идентификации для событий из сейсмограммы косинусной фазовой функции, включающей горизонтальное наложение сейсмограмм косинусной фазовой функции, причем переменный параметр пороговой функции идентификации является общим количеством трасс прохождения сигнала.
2. Способ по п. 1, в котором стадия получения пороговой функции идентификации для событий дополнительно содержит:
получение статистическим путем отношения между максимумом Sn (t), полученного горизонтальным наложением сейсмограмм косинусной фазовой функции и общего количества трасс прохождения сигнала для получения пороговой функции идентификации для событий, которые изменяются в зависимости от общего количества трасс прохождения сигнала.
3. Способ по п. 1, в котором пороговая функция идентификации для событий представлена уравнением:
в котором n представляет общее количество трасс прохождения сигнала, tp представляет время, в которое происходит пик сигнала, µ представляет поправочный коэффициент, имеющий диапазон 0,5≤µ≤1,0.
4. Способ по п. 3, в котором µ равно 0,618.
5. Способ для идентификации событий цифрового сигнала, содержащий:
ввод сейсмограммы идентифицируемого цифрового сигнала;
выполнение преобразования Гильберта на сейсмограмме входного цифрового сигнала;
извлечение сейсмограммы косинусной фазовой функции из сейсмограммы входного цифрового сигнала;
горизонтальное наложение сейсмограмм косинусной фазовой функции на сейсмограмму входного цифрового сигнала для получения в каждой точке дискретизации по времени значения функции горизонтально наложенной сейсмограммы косинусной фазовой функции из сейсмограммы входного цифрового сигнала;
значения функции, полученные в каждой точке дискретизации по времени, сравниваются со значением пороговой функции идентификации для событий, в которых пороговая функция идентификации для событий получается путем горизонтального наложения сейсмограмм косинусной фазовой функции на сейсмограмму случайного шумового сигнала, и переменный параметр пороговой функции идентификации представляет собой общее количество трасс прохождения сигнала;
точки дискретизации по времени, в которых значение функции, полученное горизонтальным наложением сейсмограмм косинусной фазовой функции на сейсмограмму входного цифрового сигнала для его идентификации больше значения функции идентификации для событий, идентифицируемых как события, имеющие место.
6. Способ по п. 5, в котором пороговая функция идентификации для событий получена из статистического отношения между максимумом Sn (t), полученного горизонтальным наложением сейсмограмм косинусной фазовой функции на сейсмограмму случайного шума, и общим количеством трасс прохождения сигнала.
7. Способ по п. 5, в котором пороговая функция идентификации для событий представлена уравнением:
в котором n представляет общее количество трасс прохождения сигнала, tp представляет время, в которое происходит пик сигнала и µ представляет поправочный коэффициент, имеющий диапазон 0.5≤µ≤1.0
8. Способ по п. 7, в котором µ=0,618.
9. Способ по п. 5, в котором сейсмограмма введенного цифрового сигнала является сейсмограммой сейсмического цифрового сигнала.
10. Способ по п. 9, в котором сейсмограмма введенного цифрового сигнала имеет низкое отношение сигнал-шум.
11. Система для идентификации событий цифрового сигнала, содержащая:
память; и
процессор, связанный с памятью;
в котором память содержит ряд команд для инициирования процессора на выполнение следующих стадий:
ввод сейсмограммы идентифицируемого цифрового сигнала;
выполнение преобразования Гильберта на сейсмограмме входного цифрового сигнала;
извлечение сейсмограммы косинусной фазовой функции из сейсмограммы входного цифрового сигнала;
горизонтальное наложение сейсмограмм косинусной фазовой функции на сейсмограмму входного цифрового сигнала для получения в каждой точке дискретизации по времени значения функции горизонтально наложенных сейсмограмм косинусной фазовой функции введенного цифрового сигнала;
значения функции, полученные в каждой точке дискретизации по времени, сравниваются со значением пороговой функции идентификации для событий, в которых пороговая функция идентификации для событий получается путем горизонтального наложения сейсмограмм косинусной фазовой функции на сейсмограмму случайного шумового сигнал, и переменный параметр пороговой функции идентификации является общим количеством трасс прохождения сигнала;
точки дискретизации по времени, в которых значение функции, полученное горизонтальным наложением сейсмограмм косинусной фазовой функции на сейсмограмму введенного идентифицируемого цифрового сигнала, больше значения функции идентификации для событий, идентифицируемых как события, имеющие место.
12. Система по п. 11, в которой пороговая функция получена из статистического отношения между максимумом Sn (t), полученного горизонтальным наложением сейсмограмм косинусной фазовой функции на сейсмограмму случайного шума, и общим количеством трасс прохождения сигнала.
13. Система по п. 11, в которой пороговая функция идентификации для событий представлена уравнением:
в котором n представляет общее количество трасс прохождения сигнала, tp представляет время, в которое происходит пик сигнала, и µ представляет поправочный коэффициент, имеющий диапазон 0.5≤µ≤1.0.
14. Система по п. 13, в котором µ=0,618.
15. Система по п. 11, в которой сейсмограмма введенного цифрового сигнала представляет собой сейсмограмму сейсмического цифрового сигнала.
16. Система по п. 15, в которой сейсмограмма введенного цифрового сигнала имеет низкое отношение сигнал-шум.
17. Машиночитаемый носитель, содержащий ряд команд, которые инициируют компьютер на выполнение способа, содержащего следующие стадии:
ввод сейсмограммы идентифицируемого цифрового сигнала;
выполнение преобразования Гильберта на сейсмограмме введенного цифрового сигнала;
извлечение сейсмограммы косинусной фазовой функции из сейсмограммы введенного цифрового сигнала;
горизонтальное наложение сейсмограмм косинусной фазовой функции на сейсмограмму введенного цифрового сигнала для получения в каждой точке дискретизации по времени значения функции сейсмограмм косинусной фазовой функции введенного цифрового сигнала;
значения функции, полученные в каждой точке дискретизации, по времени сравниваются со значением пороговой функции идентификации для событий, в которых пороговая функция идентификации для событий получается путем горизонтального наложения сейсмограмм косинусной фазовой функции на сейсмограмму случайного шумового сигнала, и переменный параметр пороговой функции идентификации представляет собой общее количество трасс прохождения сигнала;
точка дискретизации по времени, в которой значение функции, полученное горизонтальным наложением сейсмограмм косинусной фазовой функции на сейсмограмму введенного идентифицируемого цифрового сигнала, больше значения функции идентификации для событий, идентифицируемых как события, имеющие место.
| CN 102053276 A, 11.05.2011 | |||
| CN 101598595 A, 09.12.2009 | |||
| US 4858199 A, 15.08.1989 | |||
| US 3588802 A1, 28.06.1971. |

