Изобретение относится к бортовым системам автоматического управления беспилотными летательными аппаратами (ЛА).
В качестве известных решений следует отметить традиционное применение интегрирующих звеньев для достижения астатизма в системах автоматического управления летательными аппаратами (САУ ЛА) [1]. Основу известного устройства составляет наличие интегрирующего звена. В замкнутом контуре регулирования обеспечивается при этом сведение к нулю сигнала на входе интегрирующего звена. Так, при регулировании с интегральным законом по рассогласованию достигается астатизм 1-го порядка.
Недостаток известных решений для систем автоматического регулирования с существенно переменными задающими воздействиями состоит в том, что при изменении сигналов задающего воздействия на этапах перекладки по полярности или при периодических воздействиях на выходе интегрирующего звена и системы в целом создается затягивание процесса по отработке измененного сигнала воздействия, что сужает положительные свойства астатического регулирования, ухудшая характеристики системы автоматического управления по точности и быстродействию.
Наиболее близким к предлагаемому изобретению является способ формирования сигнала стабилизации ЛА, включающий задание сигнала управления, измерение сигналов углового положения и угловой скорости ЛА, формирование сигнала рассогласования между заданным сигналом управления и измеренным сигналом углового положения, усиление сигналов рассогласования и угловой скорости, формирование сигнала суммы усиленных сигналов рассогласования и угловой скорости, формирование сигнала интегральной компоненты, масштабирование сигнала интегральной компоненты, ограничение масштабированного сигнала интегральной компоненты и суммирование сигнала суммы усиленных сигналов рассогласования и угловой скорости с ограниченным масштабированным сигналом интегральной компоненты [2].
Наиболее близким к предлагаемому изобретению является устройство формирования сигнала управления ЛА, имеющее датчик угла, датчик угловой скорости, последовательно соединенные задатчик сигнала управления, блок сравнения, второй вход которого соединен с выходом датчика угла, суммирующий усилитель, второй вход которого соединен с выходом датчика угловой скорости, и сумматор, и последовательно соединенные интегрирующий усилитель и первый ограничитель сигнала, выход которого соединен со вторым входом сумматора [2].
Недостатками известных способа и устройства являются ограниченность функциональных возможностей управления и невысокая точность при наличии возмущений, действующих на ЛА, например ветровых порывов, приводящих к неустойчивости планирующего движения.
Технической задачей, решаемой в предлагаемых способе и устройстве, является расширение функциональных возможностей и повышение точности управления.
Для решения названной технической задачи в способе формирования интегрального сигнала стабилизации планирующего движения ЛА, включающем задание сигнала управления, измерение сигналов углового положения и угловой скорости ЛА, формирование сигнала рассогласования между заданным сигналом управления и измеренным сигналом углового положения, усиление сигналов рассогласования и угловой скорости, формирование сигнала суммы усиленных сигналов рассогласования и угловой скорости, формирование сигнала интегральной компоненты, масштабирование сигнала интегральной компоненты, ограничение масштабированного сигнала интегральной компоненты и суммирование сигнала суммы усиленных сигналов рассогласования и угловой скорости с ограниченным масштабированным сигналом интегральной компоненты, дополнительно задают опорный сигнал, формируют сигнал модульной функции сигнала интегральной компоненты, формируют сигнал логического управления отличным от нуля при превышении сигнала модульной функции над заданным опорным сигналом и при одинаковых по знаку сигналов рассогласования и интегральной компоненты, и равным нулю при сигнале модульной функции меньшей или равной заданному опорному сигналу, формируют логически управляемый сигнал рассогласования равным сигналу рассогласования при сигнале логического управления равным нулю, сигнал интегральной компоненты формируют интегрированием логически управляемого сигнала рассогласования и формируют выходной сигнал управления ограничением суммированного сигнала.
Для решения названной технической задачи устройство формирования интегрального сигнала стабилизации планирующего движения ЛА, содержащее датчик угла, датчик угловой скорости, последовательно соединенные задатчик сигнала управления, элемент сравнения, второй вход которого соединен с выходом датчика угла, суммирующий усилитель, второй вход которого соединен с выходом датчика угловой скорости, и сумматор, и последовательно соединенные интегрирующий усилитель и первый ограничитель сигнала, выход которого соединен со вторым входом сумматора, дополнительно содержит последовательно соединенные задатчик опорного сигнала, логический блок сравнения и управляемый ключ, сигнальный вход которого соединен с выходом элемента сравнения, а выход - со входом интегрирующего усилителя, формирователь сигнала модульной функции, вход которого соединен с выходом интегрирующего усилителя, выход которого соединен со вторым входом логического блока сравнения, а выход формирователя сигнала модульной функции - с третьим входом логического блока сравнения, и второй ограничитель сигнала, вход которого соединен с выходом сумматора, а выход является выходом устройства, при этом выход элемента сравнения соединен также с четвертым входом логического блока сравнения.
Предложенные способ формирования интегрального сигнала стабилизации планирующего движения ЛА и устройство для его осуществления, как показывает проведенное математическое моделирование, позволяют расширить функциональные возможности управления беспилотным ЛА, дают возможность стабилизировать планирующее состояние ЛА в условиях действия возмущающих факторов, типа ветровых порывов, и одновременно отрабатывать медленно меняющиеся сигналы управления и быстро меняющиеся стабилизационные сигналы, и повысить при этом точность управления. По существу, сформированы два взаимосвязанных канала, сочетающие в целом управление медленным планирующим и быстрым маневренным движением ЛА.
Способ формирования интегрального сигнала стабилизации планирующего движения ЛА и устройство для его осуществления могут найти применение в системах управления маневренными ЛА, к которым предъявляются достаточно высокие требования по точности управления при ограниченных энергетических или динамических ресурсах исполнительных органов систем управления.
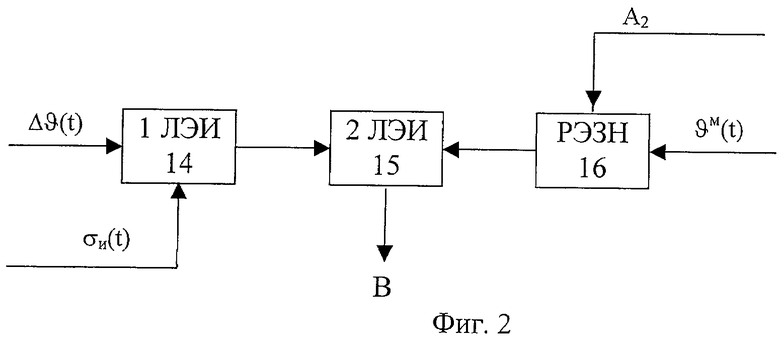
На фиг.1 представлена блок-схема устройства формирования интегрального сигнала стабилизации планирующего движения ЛА, на фиг.2 - блок-схема логического блока сравнения.
Устройство формирования интегрального сигнала стабилизации планирующего движения ЛА (фиг.1) содержит датчик угла 1 (ДУ), датчик угловой скорости 2 (ДУС), последовательно соединенные задатчик сигнала управления 3 (ЗСУ), элемент сравнения 4 (ЭС), второй вход которого подключен к выходу датчика угла 1, суммирующий усилитель 5 (СУ), второй вход которого соединен с выходом датчика угловой скорости 2, сумматор 6 (С), последовательно соединенные интегрирующий усилитель 7 (ИУ) и первый ограничитель сигнала 8 (1 ОС), выход которого соединен со вторым входом сумматора 6, и последовательно соединенные задатчик опорного сигнала 9 (ЗОС), логический блок сравнения 10 (ЛВС) и управляемый ключ 11 (УК), сигнальный (второй) вход которого соединен с выходом элемента сравнения 4, а выход - со входом интегрирующего усилителя 7, выход усилителя 7 соединен со вторым входом логического блока сравнения, формирователь сигнала модульной функции 12 (ФСМФ), вход которого соединен с выходом интегрирующего усилителя 7, а выход - с третьим входом логического блока сравнения 10, и второй ограничитель сигнала 13 (2 ОС), вход которого соединен с выходом сумматора 6, а выход является выходом устройства, при этом выход элемента сравнения 4 соединен также с четвертым входом логического блока сравнения 10.
Блок-схема логического блока сравнения 10 (фиг.2) содержит последовательно соединенные первый логический элемент И 14 (1 ЛЭИ), на первый и второй входы которого подаются сигналы Δϑ(t) и σи(1) от блоков 4 и 7 (фиг.1) соответственно, и второй логический элемент И 15 (2 ЛЭИ), выход которого соединен с управляемым ключом 11, и релейный элемент с зоной нечувствительности 16 (РЭЗН), первый и второй входы которого соединены с выходом задатчика опорного сигнала 9 и выходом формирователя сигнала модульной функции 12 соответственно.
Устройство формирования интегрального сигнала стабилизации планирующего движения ЛА, реализующее предлагаемый способ, работает следующим образом.
Задатчиком сигнала управления 3 формируется (задается) сигнал управления ϑзад(t), основными составными компонентами которого являются:
- медленная компонента ϑзад.м(t) соответствующая медленным планирующим разворотам ЛА;
- быстрая компонента ϑзад.б(t), соответствующая маневренным разворотам ЛА.
Таким образом,

Закон регулирования (управления и стабилизации) формируется по сигналам управления ϑзад(t), углового положения ЛА ϑ(t) и угловой скорости ЛА ωz(t). Основная, базовая компонента сигнала управления σб(t) формируется в суммирующем усилителе 5 в виде

где Δϑ(t) - сигнал рассогласования,

формируемый элементом сравнения 4 по сигналам ϑзад(t) от задатчика сигнала управления 3 и ϑ(t) от датчика угла 1;
Kϑ, Kωz - передаточные числа усилителя 5;
ωz(t) - сигнал угловой скорости ЛА, поступающий от датчика угловой скорости 2,  .
.
Сигнал, сформированный в соответствии с базовым законом управления (2), дополняется сигналом интегральной компоненты σи(1), который формируется интегрирующим усилителем 7 по сигналу рассогласования (3) до уровня, соответствующего планирующему движению ЛА, по логике, изложенной далее. Таким образом,

где Ки - масштабный передаточный коэффициент интегрирующего усилителя 7.
Сигнал σи(t) ограничивается первым ограничителем сигнала 8 до уровня А1, который соответствует расчетному значению отклонения рулей δпл в планирующем режиме.
Сигнал на выходе задатчика опорного сигнала 9 ограничивается до уровня А2, что соответствует зоне нечувствительности блока 16.
Ограниченный сигнал интегральной компоненты σпл(t) первого ограничителя 8 поступает на сумматор 6, сигнал на выходе которого равен

который ограничивается вторым ограничителем сигнала 13 до уровня А3 и является выходным сигналом устройства σвых(t).
Уровень ограничения А3 второго ограничителя сигнала 13 определяет величину сигналов рассматриваемого канала управления, необходимую для отработки их соответствующими рулевыми поверхностями с учетом отработки этими же рулями сигналов смежных каналов (курса и крена, здесь не рассматриваемых).
Введение канала интегральной компоненты - блоков 7, 8, 11 - обеспечивает отработку планирующей, медленной компоненты сигнала управления ϑзад.м(t). Действительно, пусть ϑзад.б=0, ϑзад.м≠0. Тогда в силу того, что закон формирования выходного сигнала представленного устройства является астатическим законом первого порядка, установившееся значение сигнала рассогласования для этого режима

Тогда в соответствии с уравнением (3) установившееся значение ϑуст будет

Видно также, что для этого режима  . Следовательно, и установившееся значение интегральной компоненты соответствует значению угла отклонения рулевых поверхностей ЛА для планирующего движения.
. Следовательно, и установившееся значение интегральной компоненты соответствует значению угла отклонения рулевых поверхностей ЛА для планирующего движения.
При поступлении на вход прямой цепи устройства (блоки 4, 5, 6, 13) быстрой компоненты сигнала управления ϑзад.б(t) для управления маневром ЛА или при внешних возмущениях отработка сигнала будет осуществляться относительно процесса планирующего движения ЛА, что повышает точность отработки управляющих воздействий на ЛА в целом.
Дополнительный логически управляющий канал, включающий в себя блоки 9, 10, 11, 12, обеспечивает режим непосредственного интегрирования сигнала рассогласования интегрирующим усилителем 7 в пределах определенного диапазона A1÷А2. Уровень A1 выставлен в ограничителе сигнала 8 в соответствии с реальным расчетным значением сигнала управления σпл(t), соответствующем отклонению рулей высоты для планирующего движения ЛА. Величина А2 (блок 9) определяет стабилизацию планирующего режима, А2>A1, А2≈(1.2÷1.5) A1.
В формирователе сигнала модульной функции 12 формируется сигнал

Логический блок сравнения 10 (фиг.1), состоящий из блоков 14, 15 и 16 (фиг.2), формирует сигнал логического управления В>0 при превышении сигнала ϑм(t) над А2 и при совпадении знаков сигналов Δϑ(t) и σи(t), отключая ключом 11 сигнал Δϑ(t) от интегрирующего усилителя 7, прекращая тем самым дальнейшее его интегрирование

Процесс интегрирования восстанавливается при В=0.
Ограничение сигнала интегральной компоненты позволяет уменьшить колебательность в замкнутом контуре регулирования и выбросы (перерегулирование) в переходных процессах, особенно при воздействии возмущений.
Таким образом, предложенные способ формирования интегрального сигнала стабилизации планирующего движения ЛА и устройство для его осуществления позволяют расширить функциональные возможности управления беспилотным летательным аппаратом и повысить при этом точность управления с учетом действия возмущающих факторов. Сформированы два взаимосвязанных канала, сочетающие в целом управление медленным планирующим и быстрым маневренным движением ЛА.
Положительный эффект предложения подтвержден результатами анализа и математического моделирования.
Все составные операции способа, звенья и блоки устройства управления могут быть выполнены на современных элементах автоматики и вычислительной техники [3], а также и программно-алгоритмически в бортовых вычислительных машинах ЛА.
Источники информации
1. Патент РФ №2275675, кл. G06F 7/38, 2004 г.
2. Патент РФ №2310899, кл. G05D 1/08, 2007 г.
3. А.У.Ялышев, О.И.Разоренов. Многофункциональные аналоговые регулирующие устройства автоматики. М.: Машиностроение, 1981, с.103.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО АДАПТИВНОГО СИГНАЛА СТАБИЛИЗАЦИИ ПЛАНИРУЮЩЕГО ДВИЖЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2460113C1 |
| СПОСОБ ФОРМИРОВАНИЯ АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2569580C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПРОДОЛЬНО-БАЛАНСИРОВОЧНОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2310899C1 |
| АДАПТИВНОЕ УСТРОЙСТВО ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ПРОДОЛЬНО-БАЛАНСИРОВОЧНЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2394263C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ НЕСТАЦИОНАРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490686C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО АДАПТИВНОГО СИГНАЛА СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО КУРСУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491600C1 |
| МНОГОРЕЖИМНОЕ ЦИФРОАНАЛОГОВОЕ УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ПО ТАНГАЖУ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2541903C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ ДЛЯ БОРТОВЫХ СИСТЕМ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2469373C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО СИГНАЛА УПРАВЛЕНИЯ ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2403608C1 |
| Модернизированная бортовая адаптивная система стабилизации бокового движения летательного аппарата | 2015 |
|
RU2611459C1 |
Изобретение относится к бортовым системам автоматического управления беспилотными летательными аппаратами. В способе формируют сигнал логического управления отличным от нуля при превышении сигнала модульной функции над заданным опорным сигналом и при одинаковых по знаку сигналах рассогласования и интегральной компоненты, и равным нулю при сигнале модульной функции меньшей или равной заданному опорному сигналу. Формируют логически управляемый сигнал рассогласования равным сигналу рассогласования, при сигнале логического управления равным нулю. Сигнал интегральной компоненты формируют интегрированием логически управляемого сигнала рассогласования. Формируют выходной сигнал управления ограничением суммированного сигнала. Устройство формирования интегрального сигнала стабилизации планирующего движения содержит датчик угла (1), датчик угловой скорости (2), задатчик сигнала управления (3), элемент сравнения (4), суммирующий усилитель (5), сумматор (6), интегрирующий усилитель (7), первый ограничитель сигнала (8), задатчик опорного сигнала (9), логический блок сравнения (10), управляемый ключ (11), формирователь сигнала модульной функции (12) и второй ограничитель сигнала (13). Достигается расширение функциональных возможностей и повышение точности управления. 2 н.п. ф-лы, 2 ил.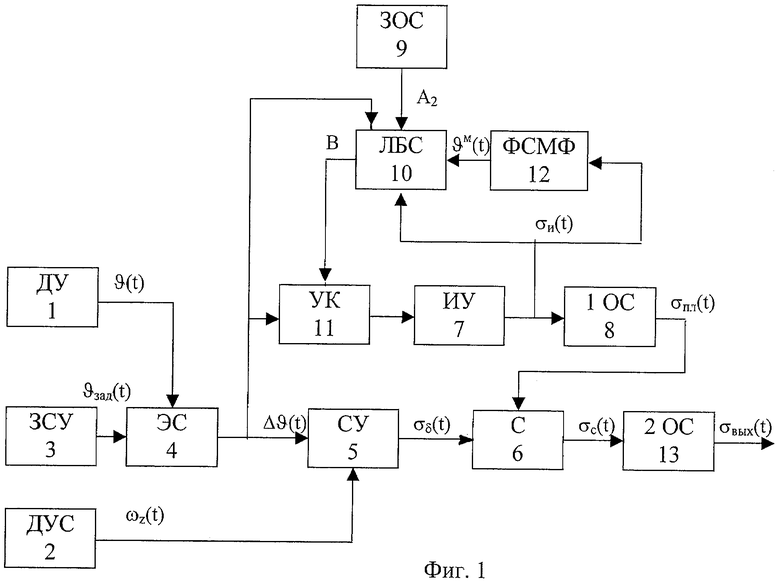
1. Способ формирования интегрального сигнала стабилизации планирующего движения беспилотного летательного аппарата, включающий задание сигнала управления, измерение сигналов углового положения и угловой скорости летательного аппарата, формирование сигнала рассогласования между заданным сигналом управления и измеренным сигналом углового положения, усиление сигналов рассогласования и угловой скорости, формирование сигнала суммы усиленных сигналов рассогласования и угловой скорости, формирование сигнала интегральной компоненты, масштабирование сигнала интегральной компоненты, ограничение масштабированного сигнала интегральной компоненты и суммирование сигнала суммы усиленных сигналов рассогласования и угловой скорости с ограниченным масштабированным сигналом интегральной компоненты, отличающийся тем, что задают опорный сигнал учета возмущений, формируют сигнал модульной функции сигнала интегральной компоненты, формируют сигнал логического управления отличным от нуля, при превышении сигнала модульной функции над заданным опорным сигналом и при одинаковых по знаку сигналах рассогласования и интегральной компоненты, и равным нулю, при сигнале модульной функции меньшей или равной заданному опорному сигналу, формируют логически управляемый сигнал рассогласования равным сигналу рассогласования, при сигнале логического управления равным нулю, сигнал интегральной компоненты формируют интегрированием логически управляемого сигнала рассогласования, и формируют выходной сигнал управления ограничением суммированного сигнала.
2. Устройство формирования интегрального сигнала стабилизации планирующего движения беспилотного летательного аппарата, содержащее датчик угла, датчик угловой скорости, последовательно соединенные задатчик сигнала управления, элемент сравнения, второй вход которого соединен с выходом датчика угла, суммирующий усилитель, второй вход которого соединен с выходом датчика угловой скорости, и сумматор, и последовательно соединенные интегрирующий усилитель и первый ограничитель сигнала, выход которого соединен со вторым входом сумматора, отличающееся тем, что содержит последовательно соединенные задатчик опорного сигнала, логический блок сравнения и управляемый ключ, сигнальный вход которого соединен с выходом элемента сравнения, а выход - со входом интегрирующего усилителя, формирователь сигнала модульной функции, вход которого соединен с выходом интегрирующего усилителя, выход последнего соединен со вторым входом логического блока сравнения, а выход формирователя сигнала модульной функции - с третьим входом логического блока сравнения, и второй ограничитель сигнала, вход которого соединен с выходом сумматора, а выход является выходом устройства, при этом выход элемента сравнения соединен также с четвертым входом логического блока сравнения.
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПРОДОЛЬНО-БАЛАНСИРОВОЧНОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2310899C1 |
| СПОСОБ ИНТЕГРИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ДЛЯ АСТАТИЧЕСКИХ СИСТЕМ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2275675C1 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КРЕНОМ ВЫСОКОМАНЕВРЕННОГО САМОЛЕТА | 2006 |
|
RU2326788C1 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2144692C1 |

