Изобретение относится к бортовым системам автоматического управления летательными аппаратами, которые реализуют в процессе полета развороты со значительными углами атаки.
Известны системы управления летательными аппаратами, содержащие в канале тангажа задатчик сигнала управления, датчик угла тангажа, датчик угловой скорости по тангажу и суммирующий усилитель, формирующие по задающим воздействиям и сигналам датчиков состояния управляющие воздействия на рулевые приводы летательного аппарата [1].
Недостатком такой реализации является ограниченность возможностей управления, требующих средств ограничения угла атаки летательного аппарата.
К известным решениям можно отнести введение дополнительных фильтров в канал управления для ограничения угла атаки [2]. Однако, эти фильтры решают частные задачи, как и описано в [2], например, в условиях ветровых порывов; в то же время фильтры в прямой цепи ослабляют прохождение сигналов управления.
К известным решениям по формированию системы управления высотой полета можно отнести систему управления по [3]. Эта система содержит и контур управления по тангажу, включающий в себя блоки по аналогу [1], описанные выше, и контур управления высотой полета, содержащий датчик высоты полета и скорости ее изменения (например, радиовысотомер), задатчик сигнала высоты, блок рассогласования по высоте и суммирующий усилитель для формирования закона управления высотой полета.
Наиболее близким к предлагаемому изобретению является система управления каналом тангажа летательного аппарата, содержащая измеритель углового положения по тангажу и рулевой привод [4].
Недостатками известной системы являются ограниченные функциональные возможности в условиях нестационарности параметров и отсутствие средств ограничения угла атаки летательного аппарата.
Решаемой в предложенной системе управления технической задачей является расширение функциональных возможностей и ограничение угла атаки.
Указанный технический результат достигается тем, что в известную систему управления высотой полета летательного аппарата, содержащую летательный аппарат как объект управления, рулевой привод, измеритель углового положения по тангажу, измеритель угловой скорости по тангажу и суммирующий усилитель, дополнительно введены датчик скоростного напора, датчик высоты и скорости изменения высоты, датчик скорости полета, задатчик сигнала высоты, блок рассогласования, первый блок ограничения сигнала, функциональный преобразователь, второй блок ограничения сигнала, функциональное устройство ограничения сигнала, первый задатчик опорного сигнала, первый блок деления и первый блок умножения, выход задатчика сигнала высоты через блок рассогласования соединен со входом суммирующего усилителя, первый и второй выходы датчика высоты и скорости изменения высоты соединены соответственно со вторым входом блока рассогласования и через первый блок умножения - со вторым входом суммирующего усилителя, выход первого блока ограничения сигнала подключен через последовательно соединенные функциональный преобразователь и второй блок ограничения сигнала ко входу рулевого привода, а вход первого блока ограничения сигнала соединен с выходом суммирующего усилителя, датчик скоростного напора соединен со вторым входом функционального преобразователя непосредственно и через функциональное устройство ограничения сигнала - со вторым входом первого блока ограничения сигнала, измеритель углового положения по тангажу и измеритель угловой скорости по тангажу соединены соответственно с третьим и четвертым входами функционального преобразователя, первый задатчик опорного сигнала и датчик скорости полета соединены с первым и вторым входами первого блока деления соответственно, а выход первого блока деления подключен ко второму входу первого блока умножения. Кроме того, функциональный преобразователь содержит последовательно соединенные второй задатчик опорного сигнала и второй блок деления, последовательно соединенные первый сумматор, второй блок умножения и второй сумматор, выход которого является выходом функционального преобразователя, последовательно соединенные третий задатчик опорного сигнала, третий блок деления и третий блок умножения, выход которого соединен со вторым входом второго сумматора, выход второго блока деления соединен со вторым входом второго блока умножения, при этом первый вход первого сумматора, второй вход второго блока деления, второй вход первого сумматора и второй вход третьего блока умножения являются первым, вторым, третьим и четвертым входами функционального преобразователя соответственно.
На фиг.1 представлена структурная схема системы управления, на фиг.2 представлена блок-схема функционального преобразователя, на фиг.3 представлена статическая характеристика функционального устройства ограничителя сигнала.
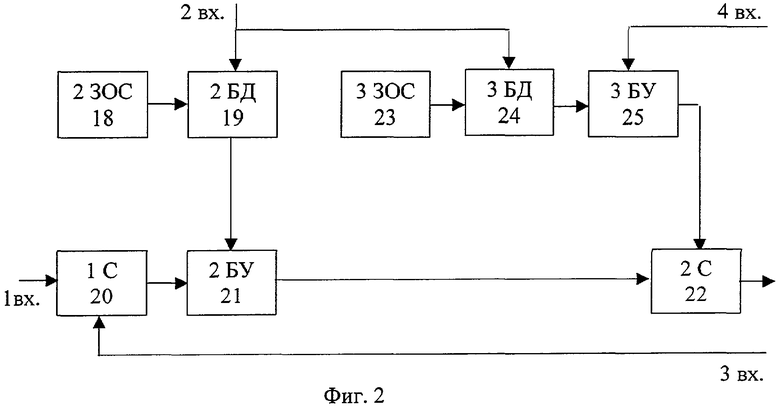
Адаптивная система управления высотой полета летательного аппарата (фиг.1) содержит последовательно соединенные задатчик сигнала высоты 1 (ЗСВ), блок рассогласования 2 (БР), суммирующий усилитель 3 (СУ), первый блок ограничения сигнала 4 (1 БОС), функциональный преобразователь 5 (ФП), второй блок ограничения сигнала 6 (2 БОС), рулевой привод 7 (РП) и летательный аппарат как объект управления 8 (ЛА), датчик скоростного напора 9 (ДСН) соединен со вторым входом функционального преобразователя 5 непосредственно и через функциональное устройство ограничения сигнала 10 (ФУОС) - со вторым входом первого блока ограничения сигнала 4, измеритель углового положения по тангажу 11 (ИУПТ) и измеритель угловой скорости по тангажу 12 (ИУСТ) соединены соответственно с третьим и четвертым входами функционального преобразователя 5, первый и второй выходы датчика высоты и скорости изменения высоты 13 (ДВиСИВ) соединены соответственно со вторым входом блока рассогласования 2 и через первый блок умножения 14 (1 БУ) со вторым входом суммирующего усилителя 3, первый задатчик опорного сигнала 15 (1 ЗОС) и датчик скорости полета 16 (ДСП) соединены с первым и вторым входами первого блока деления 17 (1 БД) соответственно, а выход первого блока деления 17 подключен ко второму входу первого блока умножения 14.
Функциональный преобразователь 5 (фиг.2) содержит последовательно соединенные второй задатчик опорного сигнала 18 (2 ЗОС) и второй блок деления 19 (2 БД), последовательно соединенные первый сумматор 20, второй блок умножения 21 и второй сумматор 22, выход которого является выходом функционального преобразователя, последовательно соединенные третий задатчик опорного сигнала 23, третий блок деления 24 и третий блок умножения 25, выход которого соединен со вторым входом второго сумматора 22, выход второго блока деления 19 соединен со вторым входом второго блока умножения 21, при этом первый вход первого сумматора 20, второй вход второго блока деления 19, второй вход первого сумматора 20 и второй вход третьего блока умножения 25 являются первым, вторым, третьим и четвертым входами функционального преобразователя 5 соответственно.
Система управления работает следующим образом.
Выходной сигнал управления  , формируемый системой управления на основе сигналов задатчиков 1 и 15 и датчиков первичной информации 11, 12, 13 летательного аппарата 8, подается на рулевой привод 7, отклонения руля которого воздействуют на летательный аппарат, изменяя его положение в соответствующем направлении. Выходными параметрами летательного аппарата являются: угол тангажа ϑ, угловая скорость
, формируемый системой управления на основе сигналов задатчиков 1 и 15 и датчиков первичной информации 11, 12, 13 летательного аппарата 8, подается на рулевой привод 7, отклонения руля которого воздействуют на летательный аппарат, изменяя его положение в соответствующем направлении. Выходными параметрами летательного аппарата являются: угол тангажа ϑ, угловая скорость  , скорость полета V, высота полета Н, скорость изменения высоты полета
, скорость полета V, высота полета Н, скорость изменения высоты полета  и скоростной напор q.
и скоростной напор q.
Датчики первичной информации измеряют и формируют соответствующие сигналы этих параметров:
- измеритель углового положения по тангажу 11 - сигнал угла тангажа ϑи;
- измеритель угловой скорости по тангажу 12 - сигнал угловой скорости по тангажу ωzи;
- датчик скорости полета 16 - сигнал скорости полета Vи;
- датчик высоты и скорости изменения высоты 13 - сигналы высоты полета Ни и скорости ее изменения  ;
;
- датчик скоростного напора 9 - сигнал скоростного напора qи.
Измеренные сигналы ϑи, ωzи, Hи и являются координатными, по ним формируются основные контуры управления и стабилизации по высоте и углу тангажа.
Сигналы qи, Vи являются параметрическими и образуют каналы адаптивной перестройки параметров (передаточных чисел и ограничения) основных контуров:
- по контуру тангажа - это передаточные числа в блоке 5 по тангажу Kϑ и угловой скорости  ;
;
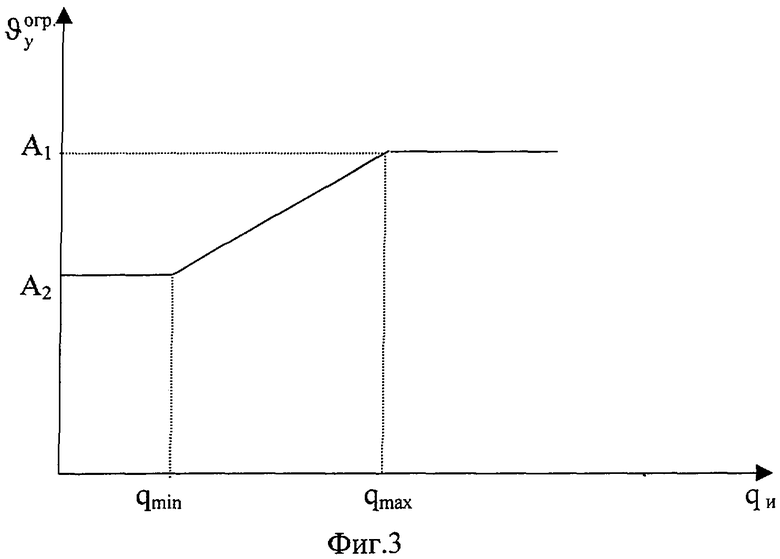
- по контуру высоты - это уровень ограничения  , определенный блоком 10 по зависимости на фиг.3 для сигнала, сформированного контуром высоты в блоке 4, и перестройки передаточного числа
, определенный блоком 10 по зависимости на фиг.3 для сигнала, сформированного контуром высоты в блоке 4, и перестройки передаточного числа  по скорости изменения высоты
по скорости изменения высоты  в функции сигнала скорости полета Vи, сформированной блоками 15, 16 и 17.
в функции сигнала скорости полета Vи, сформированной блоками 15, 16 и 17.
Функционирование системы управления происходит следующим образом.
Блок 1 выдает сигнал заданной высоты Нзад.. Блок рассогласования 2 формирует рассогласование ΔН в виде:

где Ни - сигнал, поступающий от датчика высоты и скорости изменения высоты 13.
Рассогласование ΔН поступает на суммирующий усилитель 3, на второй вход которого поступает компонента сигнала . Суммирующий усилитель 3 формирует базовый сигнал управления контура высоты для подачи в контур управления по тангажу ϑу в виде:

где Кн - передаточное число по рассогласованию ΔН;
 - компонента сигнала , формируемая блоками 15, 17, 14 и датчиками 13 и 16.
- компонента сигнала , формируемая блоками 15, 17, 14 и датчиками 13 и 16.
При этом передаточное число  формируется блоками 15, 16, 17 и составляет:
формируется блоками 15, 16, 17 и составляет:

где аo - базовый коэффициент, соответствующий, например, полету со средней скоростью Vo, т.е.

a Vи - измеренная скорость полета на выходе датчика 16.
Тогда (3) можно записать в виде:

В (4) и (5)  - базовый передаточный коэффициент по
- базовый передаточный коэффициент по  , соответствующий скорости Vo.
, соответствующий скорости Vo.
Величина ао выставляется в первом задатчике опорного сигнала 15.
Соотношение (3) формируется в первом блоке деления 17, т.е. на его выходе имеем сигнал, соответствующий  . В первом блоке умножения 14 сигналы и
. В первом блоке умножения 14 сигналы и  (последний с датчика 13) умножаются и полученный сигнал
(последний с датчика 13) умножаются и полученный сигнал  поступает в суммирующий усилитель 3.
поступает в суммирующий усилитель 3.
Таким образом, по (3) и (5) видна адаптивная перестройка передаточного числа в функции скорости полета V.
Целесообразность и достаточность предложенной адаптации можно показать на основе следующих соображений.
Контур высоты формируется по сигналам летательного аппарата Ни и  . При этом математически в операторной форме можно записать
. При этом математически в операторной форме можно записать

в то же время

где θ - угол наклона траектории:

где α - угол атаки.
Из (6) и (7) видно, что для контура управления высотой полета с замыканием и соответственно регулированием по координатам Н и  скорость полета V является общим параметром, влияющим на процессы регулирования. Абсолютно корректным для инвариантности процессов регулирования к изменению скорости является введение в контур общего коэффициента, обеспечивающего инвариантность сквозных коэффициентов передачи к этому изменению, т.е. введение сомножителя в передаточные коэффициенты КH и , обратно пропорционального скорости полета V. Однако введение этого сомножителя в прямую цепь - по Н, т.е. в коэффициент КH, существенно сказывается на статической точности, особенно в условиях применения реальных рулевых приводов, имеющих зону нечувствительности. Поэтому величина КH выбирается КH=const по двум соображениям:
скорость полета V является общим параметром, влияющим на процессы регулирования. Абсолютно корректным для инвариантности процессов регулирования к изменению скорости является введение в контур общего коэффициента, обеспечивающего инвариантность сквозных коэффициентов передачи к этому изменению, т.е. введение сомножителя в передаточные коэффициенты КH и , обратно пропорционального скорости полета V. Однако введение этого сомножителя в прямую цепь - по Н, т.е. в коэффициент КH, существенно сказывается на статической точности, особенно в условиях применения реальных рулевых приводов, имеющих зону нечувствительности. Поэтому величина КH выбирается КH=const по двум соображениям:
1) обеспечения точности;
2) обеспечения устойчивости и качества в сочетании с коэффициентом , принятым по (3) и (5).
Сформированный сигнал ϑу ограничивается в блоке 4 до определенной величины  , которая позволяет соответственно ограничить угол атаки α в переходном процессе.
, которая позволяет соответственно ограничить угол атаки α в переходном процессе.
В общем случае летательный аппарат имеет тенденцию к большим забросам на малых скоростных напорах, что определяет введение соответствующей нелинейной зависимости блока  в функции от скоростного напора. Эта зависимость в общем виде представлена на фиг.3.
в функции от скоростного напора. Эта зависимость в общем виде представлена на фиг.3.
С блока 4 выходит сигнал  с учетом необходимого ограничения базового сигнала ϑу.
с учетом необходимого ограничения базового сигнала ϑу.
Сигнал является задающим для части системы управления по тангажу и сформированным на основе сигналов ϑи и ωzи, соответствующих ϑ и ωz летательного аппарата 8 и поступающих с датчиков 11 и 12.
Таким образом, сигналы , ϑи и ωzи поступают в блок 5 для формирования сигнала управления угловой стабилизацией по тангажу. Выходом этого блока является базовый сигнал угловой стабилизации:

Блок-схема функционального преобразователя 5 представлена на фиг.2. На схеме отражено сочетание координатных сигналов ϑи и ωzи и параметрических Kϑ и  в функции скоростного напора q≅qи. Действительно, задатчиками 18 и 23 определено базовое значение передаточных чисел
в функции скоростного напора q≅qи. Действительно, задатчиками 18 и 23 определено базовое значение передаточных чисел  и
и  соответственно. Зависимость требуемого изменения (адаптации) передаточных чисел от qи реализована во втором 19 и третьем 24 блоках деления: на второй блок деления 19 поступает сигнал от блока 18 и qи от блока 9, на его выходе формируется сигнал, соответствующий адаптированному передаточному числу
соответственно. Зависимость требуемого изменения (адаптации) передаточных чисел от qи реализована во втором 19 и третьем 24 блоках деления: на второй блок деления 19 поступает сигнал от блока 18 и qи от блока 9, на его выходе формируется сигнал, соответствующий адаптированному передаточному числу

Соответственно на блок 24 поступают сигналы  от блока 23 и qи от блока 9, на выходе его формируется сигнал, соответствующий передаточному числу
от блока 23 и qи от блока 9, на выходе его формируется сигнал, соответствующий передаточному числу  с учетом адаптации:
с учетом адаптации:

В блоке 20 формируется рассогласование Δϑ:

В блоке 21 (второй блок умножения) формируется компонента сигнала рассогласования для сигнала σв, равная КϑΔϑ, здесь сигнал Кϑ поступает с блока 19; в блоке 25 формируется компонента сигнала по угловой скорости ωz, равная  и ωzи, здесь сигнал
и ωzи, здесь сигнал  поступает с блока 24.
поступает с блока 24.
В сумматоре 22 формируется сигнал σв:

Базовый сигнал стабилизации σв ограничивается в блоке 6 (фиг.1) до технического уровня, соответствующего задействованию в дальнейшем рулевых приводов для этого канала (тангажа-высоты) и с учетом возможности задействования этих рулевых приводов для смежных каналов (курса, крена).
Построение канала адаптации передаточных чисел Кϑ и в функции скоростного напора достаточно и оправдано, поскольку, во-первых, просто и экономично, а во-вторых, отражает инвариантность к нестационарному изменению аэродинамических характеристик летательного аппарата в функции от скоростного напора как доминирующего фактора.
Таким образом, предложенное построение адаптивной системы управления высотой полета летательного аппарата позволяет расширить функциональные возможности управления летательным аппаратом и ограничить угол атаки.
Все блоки системы управления являются стандартными и могут быть реализованы на элементах автоматики и вычислительной техники, например, по [5, 6], а также программно-алгоритмически в БЦВМ.
Источники информации
1. Патент РФ №1751716, 30.07.92 г., кл. G 05 B 13/02.
2. Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов./ Под ред. Г.С.Бюшгенса. М.: Наука, Физматлит, 1998, с.616-618.
3. В.А.Боднер. Теория автоматического управления полетом. М.: Наука, 1964, с.178.
4. И.А.Михалев и др. Системы автоматического управления самолетом. М.: Машиностроение, 1987, с.30, 194.
5. А.У.Ялышев, О.И.Разоренов. Многофункциональные аналоговые регулирующие устройства автоматики. М.: Машиностроение, 1981, с.103.
6. В.Б.Смолов. Функциональные преобразователи информации. Л.: Энергоиздат, Ленинградское отделение, 1981, с.55.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОРЕЖИМНОЕ ЦИФРОАНАЛОГОВОЕ УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ПО ТАНГАЖУ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2541903C1 |
| БОРТОВАЯ ЦИФРОАНАЛОГОВАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2009 |
|
RU2391694C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ КАНАЛОМ ТАНГАЖА ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2303805C1 |
| БОРТОВАЯ ЦИФРОАНАЛОГОВАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА ПО КРЕНУ | 2005 |
|
RU2305308C1 |
| СПОСОБ ФОРМИРОВАНИЯ АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2569580C2 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С ПЕРЕМЕННОЙ СТРУКТУРОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491601C1 |
| БОРТОВАЯ СИСТЕМА УГЛОВОЙ СТАБИЛИЗАЦИИ ДЛЯ УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2338236C1 |
| Модернизированная бортовая адаптивная система стабилизации бокового движения летательного аппарата | 2015 |
|
RU2611459C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379738C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379739C1 |
Изобретение относится к бортовым системам автоматического управления летательными аппаратами, которые реализуют в процессе полета развороты со значительными углами атаки. Система управления содержит летательный аппарат как объект управления, рулевой привод, измеритель углового положения по тангажу, измеритель угловой скорости по тангажу, суммирующий усилитель, датчик скоростного напора, датчик высоты и скорости изменения высоты, датчик скорости полета, задатчик сигнала высоты, блок рассогласования, первый блок ограничения сигнала, функциональный преобразователь, второй блок ограничения сигнала, функциональное устройство ограничения сигнала, первый задатчик опорного сигнала, первый блок деления и первый блок умножения, при этом функциональный преобразователь содержит по два задатчика опорного сигнала, блока деления, блока умножения и сумматора. Техническим результатом является расширение функциональных возможностей и ограничение угла атаки летательного аппарата. 1 з.п. ф-лы, 3 ил.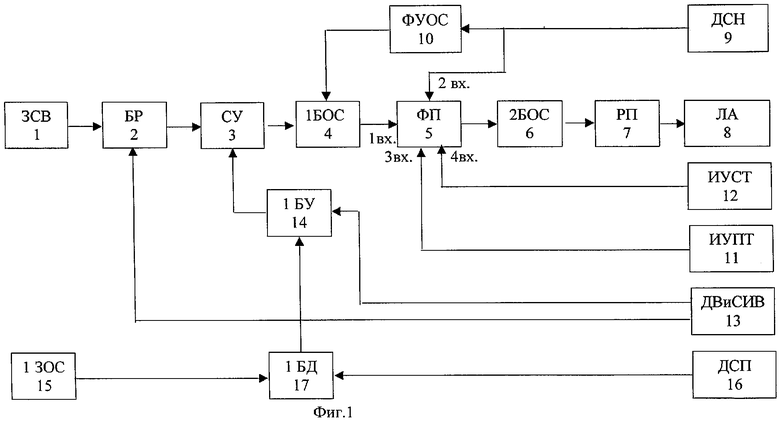
| МИХАЛЕВ И.А | |||
| и др | |||
| Системы автоматического управления самолетом | |||
| М.: Машиностроение, 1987, с.30, 194 | |||
| Устройство координированного регулирования углового бокового движения летательного аппарата | 1990 |
|
SU1751716A1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА | 1996 |
|
RU2093420C1 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕГКОГО САМОЛЕТА | 2000 |
|
RU2176812C1 |
| US 3980258 A, 14.09.1976 | |||
| US 6259380 B1, 10.07.2001. | |||

